Изобретение относится к измерительной технике, в частности к сканирующей зондовой микроскопии (SPM-микроскопии), в частности к атомно-силовой микроскопии (AFM- или ACM-микроскопии), к средствам контроля рельефа и поверхностных свойств образцов с помощью сканирующего зондового микроскопа, и может быть использовано для получения пространственных распределений свойств поверхности и расположенных на ней слоев.
В так называемой AFM-микроскопии для исследования поверхности образца измеряются силы взаимодействия между поверхностью и зондом, размещенным в непосредственной близи от поверхности (≈1 нм) или прямо на ней. При этом и в AFM-микроскопии и в предлагаемом способе помимо сил межатомного взаимодействия, могут регистрироваться электрические и магнитные силы.
При сканировании поверхности достигается высочайшее разрешение, однако за счет касательного скольжения на результате сказывается переменный коэффициент трения, истирание зонда, зонд может быть просто поврежден при столкновении с неровностями, например стенками поверхностных бороздок, и другие факторы, обусловленные постоянным контактом. Более того, зачастую сила трения препятствует движению зонда, внося значительную погрешность, а в процессе сканирования поверхностный слой нарушается. И, наконец, существенную погрешность вносят силы адгезии, прижимающие зонд к поверхности, усиливая при этом силу трения и дополнительно деформирующие поверхность образца.
Попытка преодолеть этот недостаток была сделана в бесконтактных вибрационных способах микроскопии. Так, известен бесконтактный вибрационный способ получения и обработки данных в сканирующей зондовой микроскопии, включающий приведение зонда, расположенного на свободном конце кантилевера (упругой консоли), в колебание гармоническим сигналом на частоте механического резонанса, поддержание постоянным среднего расстояния между зондом и поверхностью и регистрацию координат зонда без гармонической составляющей (см. ЕР N 0574234, G 01 B 21/30, 1993). При приближении зонда к исследуемой поверхности вследствие их взаимодействия амплитуда колебаний зонда изменяется. В процессе сканирования над исследуемым участком система слежения поддерживает постоянным среднее расстояние между зондом и поверхностью таким, чтобы амплитуда колебаний зонда сохранялась равной заданной величине. В результате траектория перемещения зонда без учета гармонической составляющей огибает рельеф поверхности, так что координаты этой траектории и составляют образ исследуемой поверхности.
Известен также вибрационный способ получения данных в сканирующей зондовой микроскопии, включающий приведение зонда, расположенного на свободном конце кантилевера, в колебание гармоническим сигналом на частоте, отличной от частоты механического резонанса, поддержание постоянным среднего расстояния между зондом и поверхностью и регистрацию координат зонда без учета гармонической составляющей фазы колебаний кантилевера (патент США N 5406832, G 01 B 5/00, 1995). При этом средняя траектория перемещения зонда огибает рельеф поверхности, а карта изменения фазы сигнала косвенно характеризует распределение ее свойств, поскольку измеряемый сдвиг фазы есть не что иное, как время, которое зонд находится в контакте с поверхностью в каждой исследуемой точке. Это время зависит от величины локальной силы адгезии в соответствующей точке. Таким образом, результатом использования этого способа сбора данных является карта, отражающая распределение локальной силы адгезии в каждой точке исследуемой поверхности.
Недостатками вибрационных способов является низкая разрешающая способность и косвенный характер определения параметров поверхности, следствием чего является недостаточная точность и достоверность полученных данных. Более того, вибрационные способы не позволяют разделить информацию о свойствах поверхностных слоев и самой поверхности образца, о различных ее параметрах (вследствие неоднозначного понимания причин изменения регистрируемых параметров), а используемые при их осуществлении преобразования сигналов (например, при расчете силы адгезии по результатам фазовых измерений) и системы слежения (обеспечивающие постоянство амплитуды) вносят дополнительные погрешности в конечный результат.
Известен также "прыгающий" способ сканирующей зондовой микроскопии, включающий измерение координаты зонда в процессе его сближения с образцом и разведение образца и зонда с последующим отображением рельефа по измеренным величинам координат в точке реверса, причем сближение производится до достижения постоянной силы взаимодействия, для чего служит цепь обратной связи (система слежения) (см. ЕР N 0584440, G 01 B 7/34, 1993). В процессе сканирования поверхности информация о рельефе запоминается и используется при выработке траектории зонда, что позволяет повысить производительность способа и одновременно исключить нежелательное касательное скольжение зонда по поверхности. Однако данный способ недостаточно информативен, так как не позволяет получить распределение свойств по поверхности образца, картину расположенных на поверхности слоев. Известный способ обладает также высокой погрешностью, так как не учитывает, что зонд деформирует поверхность за счет силы адгезии, обусловленной поверхностными слоями и неоднородностью поверхности. Неучтенная деформация может зависеть как от свойств, распределения и толщины поверхностных слоев, так и от вариации свойств самой поверхности. Известен способ сбора и обработки информации в процессе сканирования поверхности по патенту США N 5418363, G 01 B 21/30, 1995. В этом способе накопленные данные о рельефе используются для точного выбора высоты размещения зонда над поверхностью и для проведения независимых электрических или магнитных измерений при повторном сканировании.
Однако в этом способе не исключается составляющая погрешности, обусловленная тем, что информация о рельефе и о свойствах поверхности снимается независимо, причем на данные о рельефе влияют параметры, характеризующие физические свойства приповерхностных слоев и поверхностных загрязнений. Более того, в данном способе нельзя разделить информацию о влиянии поверхности образца и расположенных на ней слоев. В заявке Японии N 526841, G 01 B 21/30, 1995, был предложен способ двухпараметрового контроля образца, включающий фиксацию координаты образца в момент достижения заданной величины силы взаимодействия поверхности образца с зондом в процессе сканирования поверхности с целью получения рельефа, а также расчет адгезии в одной точке поверхности по силовой кривой, которую снимают в условиях контакта зонда с образцом, и распространение полученной величины адгезии для всех точек поверхности. Очевидно, что при этом вышеназванная составляющая погрешности снижается, но не исключается, а низкая достоверность результатов из-за изменений силы адгезии, вызванных неоднородностью свойств поверхности и изменением толщины поверхностных слоев, присутствует в полной мере.
Наиболее близким к предложенному является способ сбора и обработки информации о поверхности образца, включающий сближение образца и размещенного на кантилевере зонда до достижения заданной величины силы взаимодействия поверхности образца с зондом перед сканированием, затем в каждой точке сканирования фиксацию рельефа (координаты Z) при постоянной силе взаимодействия образца и зонда, снятие участка силовой кривой в процессе мгновенного соприкосновения образца с зондом и их последующего кратковременного разведения (на время снятия силовой кривой цепь обратной связи, поддерживающая силу взаимодействия образца с зондом постоянной, отключается), запоминание силовой кривой и определение по ней силы адгезии в данной точке, остановку для восстановления заданной величины силы взаимодействия поверхности образца с зондом и переход к следующей точке сканируемой поверхности (см. патент США N 5477732, G 01 B 21/30, 1995). Таким образом, в данном способе измерения в каждой точке осуществляются в две стадии: сначала, при неподвижных, находящихся в фиксированном положении зонде и образце определяется рельеф, затем, независимо, к образцу прикладывается интенсивное силовое импульсное воздействие, перемещающее его в направлении зонда, и снимается силовая кривая, по которой рассчитывается величина силы адгезии. Один из вариантов осуществления способа предполагает также повторное снятие силовой кривой в каждой точке с целью усреднения полученных значений адгезии.
Данный способ более информативен, чем предыдущий, поскольку позволяет в каждой точке определить два параметра, рельеф и величину силы адгезии. Однако и ему свойственны недостатки:
- низкая производительность, обусловленная двухступенчатым процессом измерений, а также необходимостью сначала запомнить всю силовую кривую, а затем определить величину адгезии по одной ее точке;
- возможность повреждения зонда в процессе взаимодействия с поверхностью;
- отсутствие возможности контролировать поверхность под слоями, лежащими на ней, не нарушая их;
- отсутствие возможности контролировать поверхностные слои (зонд сметает их в процессе сканирования);
- фиксируемые величины адгезии являются суперпозицией влияния чистой поверхности и находящихся на ней загрязнений, указанные влияния в известном способе нельзя разделить;
- фиксируемые величины адгезии являются суперпозицией одновременного влияния всех поверхностных структур, всех слоев самой поверхности образца, их влияние нельзя разделить;
- способ не позволяет определять толщины и распределения по исследуемому участку подповерхностных или находящихся на поверхности слоев;
- отсутствует возможность контролировать рельеф поверхностных слоев относительно рельефа поверхности;
- в процессе определения адгезии поверхность и поверхностные слои могут разрушаться, что вносит неконтролируемую погрешность в результаты замеров;
- ограниченные функциональные возможности: информация об упругих, электрических и любых других свойствах поверхности полностью отсутствует;
- фиксируемые величины независимы в том смысле, что способ не учитывает их возможного взаимного влияния; более того, учесть это влияние при последующей обработке измерительных данных не представляется возможным, так как они получены на различных стадиях, в независимых и различных условиях (при включенной и выключенной системе слежения);
- не учитываются поправки, обусловленные наличием силы адгезии и изменением свойств поверхности; при усреднении результатов измерения адгезии вносится систематическая погрешность, обусловленная возможным нарушением приповерхностного слоя первым замером силовой кривой;
- из-за наличия касательного скольжения при переходе из точки в точку присутствуют существенные погрешности и даже ограничения на выбор исследуемой поверхности, обусловленные изменением силы трения в зависимости от свойств и характера рельефа поверхности.
Иными словами, известный способ имеет низкую точность, а достоверность измерительных данных невысока (в нем не учитывается влияние поверхностных загрязнений и слоев, упругие свойства поверхности и прочие факторы, обуславливающие взаимное влияние измеряемых величин, а также влияние на результаты контроля силы трения), ограниченные функциональные возможности (не обеспечивает отображения толщин и свойств поверхностных слоев) и недостаточные надежность и производительность (что обусловлено двухстадийным характером измерений, траекторией относительного движения зонда и образца).
Из вышесказанного становится ясно, что одним из основных недостатков всех существующих способов зондовой микроскопии является невозможность разделения информации о свойствах "чистой" поверхности образца и параметрах расположенных на ней слоев (или о свойствах слоев при многослойной структуре образца, что одно и то же). Так, вибрационные методы реагируют прежде всего на поверхностные слои, но не могут выделить информацию о поверхности, тогда как в контактном и "прыгающем" сканирующих микроскопах по существу игнорируются расположенные на поверхности образца слои.
Таким образом, техническим результатом, ожидаемым от использования предлагаемого изобретения, является расширение функциональных возможностей способа сбора и обработки информации о рельефе и свойствах поверхности за счет получения отдельных распределений свойств и параметров "чистой" поверхности и послойно всех расположенных на ней структур и слоев при одновременном повышении точности и достоверности измерительной информации, повышении производительности и надежности способа, повышении его информативности и упрощении реализации, а также повышение точности и расширение области применения за счет гарантированного исключения контакта или любого взаимодействия зонда с образцом при переходе от одной точки поверхности к другой, полного исключения силы трения.
Указанный результат достигается тем, что в способе сбора и обработки информации о поверхности образца, включающем последовательное снятие в заданных точках контролируемой поверхности по меньшей мере участка силовой кривой в процессе сближения и/или следующего за реверсом разведения образца и расположенного на кантилевере зонда и определение по нему параметров образца с последующим построением соответствующих пространственных распределений, при снятии по меньшей мере участка силовой кривой производят выбор опорных точек и фиксируют значения силы отклонения кантилевера, и/или координаты его закрепленного конца, и/или производных от силы отклонения кантилевера по координате его закрепленного конца по меньшей мере в опорных точках силовой кривой, при этом параметры образца, характеризующие рельеф, и/или свойства поверхности образца, и/или число и свойства его поверхностных слоев определяют по числу опорных точек, и/или зафиксированным значениям силы отклонения кантилевера, и/или координаты его закрепленного конца, и/или производных от силы отклонения кантилевера по координате его закрепленного конца в соответствующих точках.
Кроме того, в качестве параметров, характеризующих рельеф, и/или свойства поверхности образца, и/или число и свойства его поверхностных слоев, используют координаты поверхности образца и/или границ поверхностных слоев, или толщины поверхностных слоев, или силу адгезии поверхности образца и/или поверхностных слоев, или коэффициент упругости поверхности образца и/или поверхностных слоев.
Рекомендуется также из значений силы отклонения кантилевера, и/или координаты его закрепленного конца, и/или производных от силы отклонения кантилевера по координате его закрепленного конца в по меньшей мере опорных точках формировать множество значений аргументов, а определение параметров образца производить путем формирования множества функций от полученных аргументов и определения их значений.
Кроме того, в качестве опорных выбирают точки, ограничивающие квазипрямолинейные участки силовой кривой, и/или точки, в которых силовая кривая скачкообразно изменяет наклон.
При этом в качестве опорных выбирают точки, в которых координата закрепленного конца кантилевера, и/или сила его отклонения, и/или первая или вторая ее производные по координате закрепленного конца кантилевера достигают пороговых значений, полученных, например, по результатам предшествующего сканирования или измерения.
Целесообразно также построение пространственных распределений производить относительно координаты поверхности образца.
Допускается также выбор опорных точек и/или фиксацию значений силы отклонения кантилевера и/или координаты его закрепленного конца и/или производных от силы отклонения кантилевера по координате его закрепленного конца производить после фильтрации множества текущих значений силы отклонения кантилевера и координаты его закрепленного конца.
Кроме того, определение параметров по зафиксированным значениям силы отклонения кантилевера и/или координаты его закрепленного конца и/или производных от силы отклонения кантилевера по координате его закрепленного конца в данном подмножестве опорных точек может производиться с учетом значений указанных величин в других подмножествах опорных точек.
Рекомендуется также определение параметров производить по зафиксированным значениям силы отклонения кантилевера и/или координаты его закрепленного конца и/или производных от силы отклонения кантилевера по координате его закрепленного конца в опорных точках, расположенных до и после или после и до абсолютного максимума силы отклонения кантилевера в процессе его сближения или разведения с образцом соответственно.
При этом число поверхностных слоев образца может определяться как число опорных точек, ограничивающих квазипрямолинейные участки силовой кривой, и/или точек, в которых силовая кривая скачкообразно изменяет наклон в процессе сближения или разведения образца и зонда без единицы и точки реверса, если она включена в число опорных.
Кроме того, при определении числа поверхностных слоев образца могут не учитываться начальные точки квазивертикальных участков.
Целесообразно также координату поверхности образца определять из соотношений:
Ro=Zo - So
где Ro - координата поверхности образца,
Zo, So - координата закрепленного конца кантилевера и величина отклонения его свободного конца в момент достижения силой отклонения кантилевера значения, равного 0 или -A при сближении образца и зонда и 0 или +A при разведении образца и зонда соответственно,
A - положительная постоянная величина.
Допускается также координату поверхности образца диагностировать по выполнению условия Zt - St = const,
где Zt и St - текущие значения координаты закрепленного конца кантилевера и величины отклонения его свободного конца соответственно.
Кроме того, координаты границ поверхностных слоев образца можно определять как координаты закрепленного конца кантилевера в опорных точках, не включая начальные точки квазивертикальных участков при сближении образца и зонда и конечные точки квазивертикальных участков при разведении образца и зонда.
При этом координаты границ поверхностных слоев образца и их толщины могут быть определены из соотношений вида:
Ri = Zi - Si, Di = [R(i+1) - Ri], где Ri и Di - координата границы i-го слоя и его толщина соответственно, i = (0, 1, 2...),
Zi, Si - координата закрепленного конца кантилевера и величина отклонения его свободного конца в соответствующей опорной точке, не включая начальные точки квазивертикальных участков при сближении образца и зонда и конечных точек квазивертикальных участков при разведении образца и зонда.
Кроме того, координаты границ поверхностных слоев образца относительно поверхности образца и их толщины могут определяться из соотношений вида:
R'i = Zi - Si - Ro, Di = [R'(i+1) - R'i], где R'i и Di - координата границы i-го слоя относительно поверхности образца и его толщина соответственно, i = (0, 1, 2...),
Zi, Si - координата закрепленного конца кантилевера и величина отклонения его свободного конца соответственно в соответствующей опорной точке, не включая начальные точки квазивертикальных участков при сближении образца и зонда и конечных точек квазивертикальных участков при разведении образца и зонда.
Целесообразно также координаты границ поверхностных слоев образца, измеренных при разведении или сближении, определять относительно координаты поверхности, измеренной также при разведении или сближении соответственно.
При этом силу адгезии поверхностных слоев образца определяют по значениям силы отклонения кантилевера в опорных точках, не включая конечные точки квазивертикальных участков при разведении образца и зонда.
Кроме того, суммарную силу адгезии поверхности и поверхностных слоев образца определяют как абсолютный максимум силы отклонения кантилевера в процессе разведения образца и зонда.
Рекомендуется также координату границы поверхности образца определять с поправкой на действующую между зондом и поверхностью суммарную силу адгезии из соотношения:
Roa= Ro + Fac/Kp, где Roa - координата границы поверхности образца с поправкой на действующую между зондом и поверхностью суммарную силу адгезии,
Fас - суммарная сила адгезии поверхности образца,
Kp = Kk•tgα/(1-tgα)
Kk - коэффициент упругости кантилевера на изгиб,
tgα - тангенс угла наклона силовой кривой в окрестности точки Zo.
При этом координата поверхности образца может определяться с поправкой на упругие свойства поверхности из соотношения:
Roy = Ro + So(Kk/Kp) при Ro = Zo-So,
Roy = Zt-St + St(Kk/Kp) при Zt-St = const
где Roy - координата поверхности.
Допускается также коэффициент упругости поверхностных слоев образца определять из соотношения:
Ki = B•Kk•tgαi/(1-tgαi),
где Ki - коэффициент упругости i-го слоя,
tgαi - тангенс угла наклона участка силовой кривой, расположенного между соответствующими опорными точками, B - коэффициент пропорциональности.
Кроме того, коэффициент упругости поверхности образца может быть определен из соотношения:
Kp = Kk•tgα/(1-tgα),
где Kp - коэффициент упругости поверхности образца.
При этом сближение и/или разведение образца и зонда осуществляют до достижения силой отклонения кантилевера порогового значения.
Рекомендуется также снятие силовой кривой в заданных точках контролируемой поверхности образца производить более одного раза, определяя по разности полученных значений параметров поверхности или поверхностных слоев образца степень воздействия зонда на поверхность или поверхностные слои образца соответственно.
Кроме того, снятие силовой кривой в заданных точках контролируемой поверхности образца может производиться при сближении и разведении образца и зонда, а по разности полученных значений параметров определяют величину остаточной деформации.
При этом в процессе снятия силовой кривой на проводящий зонд подают модулированный электрический потенциал, а из суммарного сигнала путем демодуляции определяют величину силы электростатического взаимодействия зонда и поверхности и/или поверхностных слоев образца.
Допускается также снятие силовой кривой в заданных точках контролируемой поверхности образца производить более одного раза, при различном электрическом потенциале проводящего зонда относительно поверхности образца, определяя по разности полученных значений силы отклонения кантилевера величину силы электростатического взаимодействия зонда и поверхности и/или поверхностных слоев образца.
Кроме того, снятие силовой кривой в заданных точках контролируемой поверхности образца может производиться более одного раза, при различном электрическом потенциале зонда относительно поверхности образца, определяя по разности полученных значений производных силы отклонения кантилевера по координате закрепленного конца величину градиента силы электростатического взаимодействия зонда и поверхности и/или поверхностных слоев образца.
И наконец, вместе со снятием силовой кривой или ее участка может осуществляться регистрация величины туннельного тока между проводящим зондом и поверхностью образца, а полученное множество значений использоваться для построения распределения электропроводности поверхности и/или поверхностных слоев образца.
Таким образом, в предлагаемом способе получение информации о рельефе поверхности и ее свойствах, количестве поверхностных слоев, их толщине, конфигурации и свойствах не разделены во времени, все измерения осуществляются в текущей точке поверхности одновременно, в процессе снятия силовой кривой, в частности за время опускания и подъема зонда.
Снятием силовой кривой выше назван процесс, включающий слежение за координатами этой кривой (силой F, действующей на зонд, расположенный на кантилевере или, что то же, величиной S или углом β отклонения зонда, и координатой Z его закрепленного конца) и производной dF/dZ (в частных случаях также и второй и/или третьей производной), а также фиксацию значений Fi, Zi и в случае необходимости dF/dZ в характерных точках силовой кривой, образующих множество аргументов. Весь объем измерительной информации, значения целого ряда величин, характеризующих поверхностную структуру образца получают в предложении из анализа силовой кривой и более того, ее отдельных характерных точек, названных выше опорными. Это не только расширяет функциональные возможности способа, но и делает измеряемые величины сопоставимыми, позволяет корректировать одни из них с использованием других, определять одни из них относительно других, разделять информацию о свойствах объектов на поверхности и свойствах самой поверхности, строить карты распределений, привязанные к рельефу поверхности и относительно этого рельефа, определенному с учетом ряда поправок, и отражающие истинную картину поверхностных слоев и их характеристик.
Особенностью предложенного способа является то, что на силовой кривой регистрируются выбираемые оператором или процессором опорные (характерные) точки. Координаты выбираемых точек, величины расстояний между ними, величины наклонов и производные участков силовой кривой и разности между ними несут информацию о различных характеристиках исследуемой поверхности, молекулярных слоев, лежащих на ней, и исследующего зонда. Регистрируя и вычисляя эти данные, ставя их в соответствие координатам точек поверхности, в которых они получены, подвергая их обработке по приведенным алгоритмам, мы имеем возможность сформировать карты распределения значений соответствующих характеристик поверхности или лежащих на ней объектов по исследуемому участку.
Опорные точки - это наиболее информативные точки силовой кривой, в которых она (или ее производная) меняет наклон или достигает пороговых значений, в том числе и заданных с определенным шагом квантования, например, по координате Z.
При характеристике поверхностных слоев важное значение имеют точки, ограничивающие квазивертикальные участки.
Под "квазивертикальными", "квазигоризонтальными" или "квазипрямолинейными" имеются в виду участки или отрезки, которые можно считать таковыми с заданной степенью точности.
Особенностью способа является также привязка всех полученных распределений к координате поверхности, причем определенной помимо измерения еще и путем обработки результатов измерений, с учетом ряда поправок.
Заметим также, что S (So) - величина, имеющая знак. При изгибе кантилевера в сторону поверхности образца она положительна, в противоположную - отрицательна.
Следует пояснить, что используемый ниже термин "координата" в зависимости от контекста используется как для обозначения координаты точки силовой кривой - проекции ее на оси S и Z, так и для обозначения координаты какой-либо точки в пространстве, в частности координаты зонда, находящегося в данной точке силовой кривой, в пространстве. Координата в пространстве - это та же проекция на ось Z, но только теперь на ней не закрепленный конец, а свободный кантилевера (зонд). Когда зонд находится на поверхности образца или слоя - его координата совпадает с координатой соответствующей поверхности.
Из изложенных ниже примеров реализации способа станут более понятны используемые в данном описании термины, однако сразу следует пояснить, что под информацией о поверхности, свойствами поверхности и поверхностных слоев понимаются также и их геометрические параметры и характеристики - координаты и толщины. При этом в число поверхностных слоев включаются как "мягкие" слои, которые зонд свободно проходит или свободно деформирует, расположенные на поверхности образца, понимаемой в обычном смысле (это могут быть любые адсорбированные слои: загрязнения, вода, двумерный конденсированный газ (пар) и т.п., назовем их "надповерхностными"), так и "жесткие" слои, в которые зонд проникает или деформирует их при достаточном усилии (это структуры самой поверхности, всевозможные твердые покрытия и т.п., назовем их "подповерхностные").
Снятие участков силовой кривой производится как и в других известных способах при заданном взаимном расположении образца и зонда, т.е. при неизменном их расположении в горизонтальной плоскости, если сближение и разведение происходят по вертикали. Иными словами речь идет об одной из точек поверхности, после снятия силовой кривой в которой зонд и/или образец (имеет значение только их относительное положение, перемещаться могут один или оба из них) перемещаются по горизонтали и процесс снятия силовой кривой продолжается в следующей точке, так что полученные значения функций могут быть использованы для построения пространственных распределений соответствующих параметров и свойств.
Под силовой кривой понимается кривая зависимости значения силы отклонения свободного конца кантилевера с зондом от значения координаты положения закрепленного конца кантилевера или любая кривая зависимости, полученной из этой кривой, например кривая зависимости силы отклонения свободного конца кантилевера от расстояния зонда до поверхности.
Следует оговориться также, что под силовой кривой понимается не обязательно вся силовая кривая, но также и заданный ее участок или их совокупность.
Особенностью предложения является также определение набора фиксируемых величин как силы отклонения кантилевера и/или координаты его закрепленного конца и/или производных (например, первой и второй) от силы отклонения кантилевера по координате его закрепленного конца.
Оговоримся также, что под использованием координат поверхности образца и/или границ поверхностных слоев, или толщины поверхностных слоев, или силы адгезии поверхности образца и/или поверхностных слоев, или коэффициента упругости поверхности образца и/или поверхностных слоев в качестве информативных параметров следует понимать использование как одной, так и сразу нескольких из перечисленных величин.
Термин "фильтрация" означает в данном случае отсечение высокочастотных составляющих тем или иным способом. Фильтрация может производиться как в процессе снятия силовой кривой, так и непосредственно со снятыми ранее данными. В предложении непрерывно регистрируются, измеряются (или задаются, как например, Z) величины F и Z, а также производные F', F'' и т.д. (все величины или их часть), однако фиксируются и впоследствии используются для сопоставления, построения распределений и обработки только их значения в опорных точках. При этом отсечение высокочастотных составляющих в зарегистрированных величинах F и Z позволяет снизить погрешность при определении опорных точек и фиксации значений аргументов в них. Задание опорных точек и пороговых значений, а также интерпретация результатов измерений в них (а следовательно и в контролируемых точках поверхности) могут производиться в предложении с учетом значений, зафиксированных предварительно или впоследствии в этих или других опорных точках, как в процессе предшествующего или последующего сканирования данного (или даже иного) образца, так и в ходе снятия предшествующей, последующей или текущей силовой кривой в данной точке поверхности.
Таким образом, в предложении процесс снятия силовой кривой в каждой заданной точке контролируемой поверхности может протекать в две стадии: а) непрерывно и последовательно измеряются координаты всех точек силовой кривой и/или определяются производные в этих точках; эти данные либо используются непосредственно, сразу по получении, например, для определения точки перелома, достижения порогового значения и т.п., либо заносятся в оперативную память на короткий промежуток времени, не превышающий интервала времени, необходимого для снятия силовой кривой в данной точке поверхности, и используются с задержкой, после чего в обоих случаях стираются, и б) фиксируются опорные (характерные) точки; для этого в качестве критериев для определения опорных точек используются данные, полученные и запомненные на первой стадии. В то же время, при использовании для выбора опорных точек информации, полученной в ходе предшествующего снятия силовой кривой в данной точке поверхности или даже предшествующего сканирования, используют не текущие значения, а значения или их функции, относящиеся к опорным точкам.
Из изложенного очевидно, что под реверсом понимается переход от сближения зонда и образца к их разведению или удалению друг от друга, а фиксацией по существу назван процесс запоминания, использования измеренных значений. Иными словами снятие кривой включает измерение текущих значений и последующую фиксацию всех или части из них.
В соответствии с принятой терминологией под силой адгезии, определяемой или учитываемой в данном способе, будем понимать суммарную силу отрыва кантилевера, включающую адгезионную, капиллярную и прочие возможные составляющие.
Следует подчеркнуть также, что все вышеназванные операции по определению формы и параметров силовой кривой, включая нахождение опорных точек, производят, как правило, над сигналом, прошедшим предварительную обработку, в частности фильтрацию, т.е. выделения полезного сигнала на фоне шумов различного происхождения (приборных и внешних). Это может происходить с применением процессора, для чего используется детектор изменения параметров сигнала (fault detector), осуществляющий предсказание экстремальных точек псевдорегулярного сигнала с использованием априорной информации об аддитивных помехах и возмущениях.
Отметим также, что простейшим случаем множества формируемых функций (аргументов) является одна функция (аргумент). Например, если в качестве аргументов рассматриваются значения силы отклонения кантилевера в опорных точках "а" и "b" и вторая производная от силы отклонения кантилевера по координате его закрепленного конца в опорной точке "с", множеством значений аргументов явятся зафиксированные значения этих величин, а определение параметров образца производится путем формирования некоторой функции F от полученных аргументов (например, вида F = fa-fb+k•f''c, где k - коэффициент) и определения их значений путем подстановки значений аргументов.
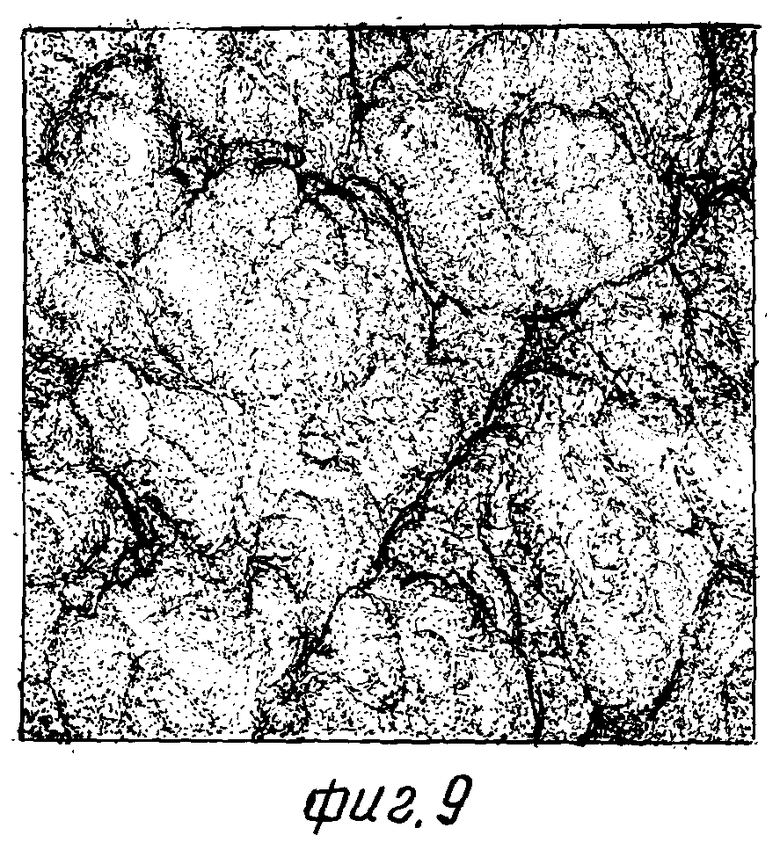
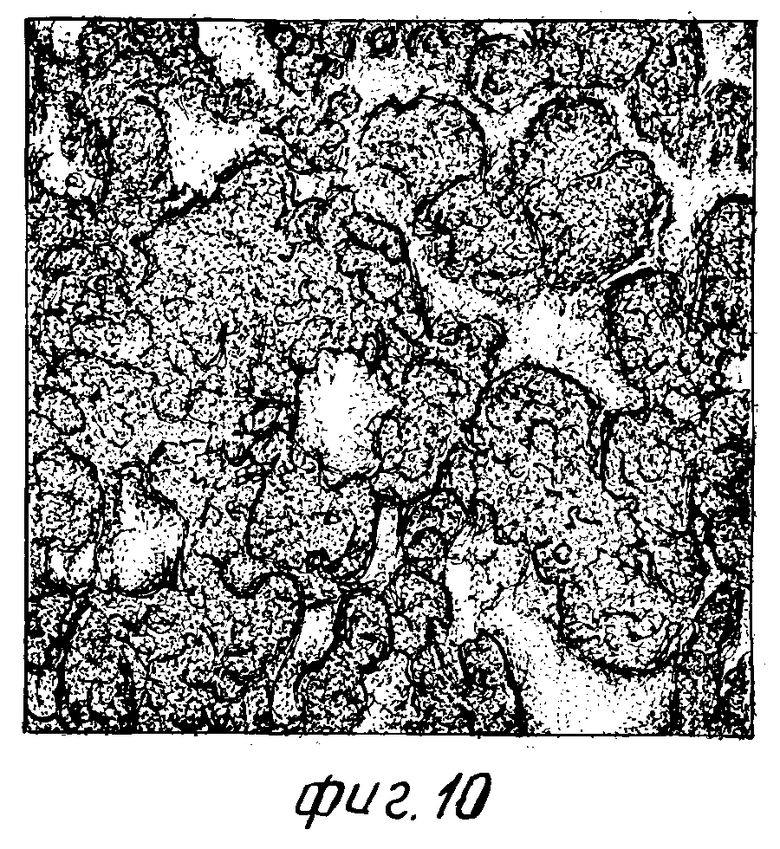
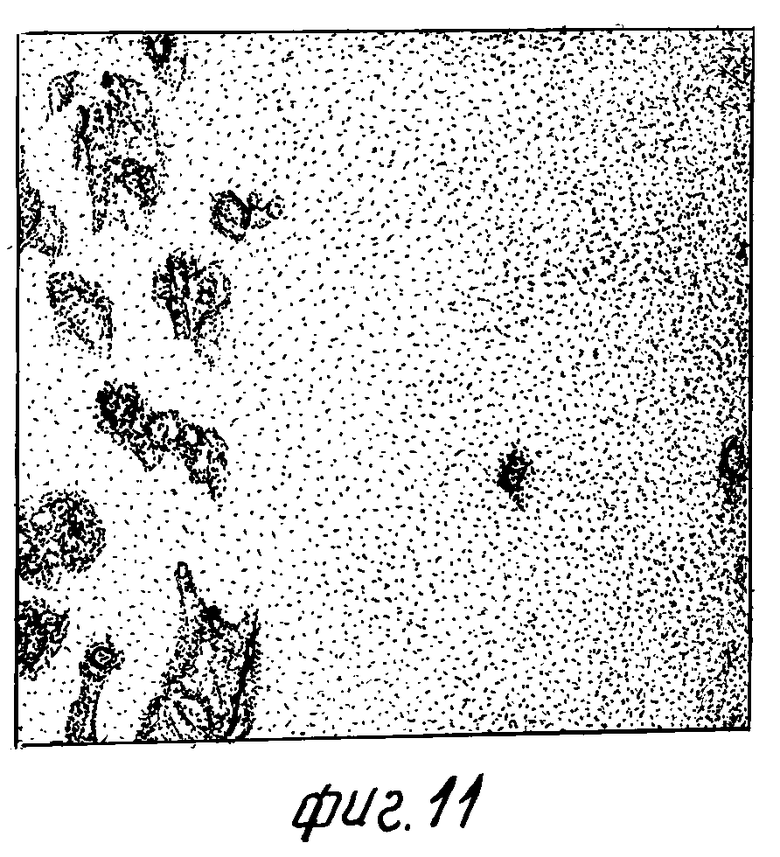
На фиг. 1 приведена блок-схема устройства для осуществления способа, на фиг. 2 кантилевер изображен отдельно. Фиг. 3 и 4 иллюстрируют участки силовой кривой, характерной для чистой поверхности без поверхностных слоев, причем на фиг. 3 во время сближения поверхности и зонда, а на фиг. 4 их разведения. На фиг. 5 схематично показана силовая кривая (как при сближении, так и при разведении), характерная для поверхности с поверхностными слоями (как надповерхностными, так и подповерхностными) и обозначены ее характерные точки и участки, на фиг. 6 - 8 (а, б) приведены варианты алгоритма работы процессора, одновременно поясняющие пошаговый процесс осуществления предлагаемого способа, а на фиг. 9 - 15 показаны структуры и распределения, полученные с использованием предлагаемого способа. Так, на фиг. 9-11 изображены карты распределений, полученные на поверхности полимера, содержащего кластеры кадмия и частично покрытого слоем адсорбированной воды. В частности, на фиг. 9 изображена карта рельефа поверхности полимера, включая кластеры кадмия, на фиг. 10 приведена карта координат поверхности адсорбированного слоя относительно поверхности полимера (по существу, распределение толщины адсорбированного слоя), а на фиг. 11 изображена карта распределения адгезионных сил, по которой идентифицируются кластеры кадмия (низкие значения силы адгезии).
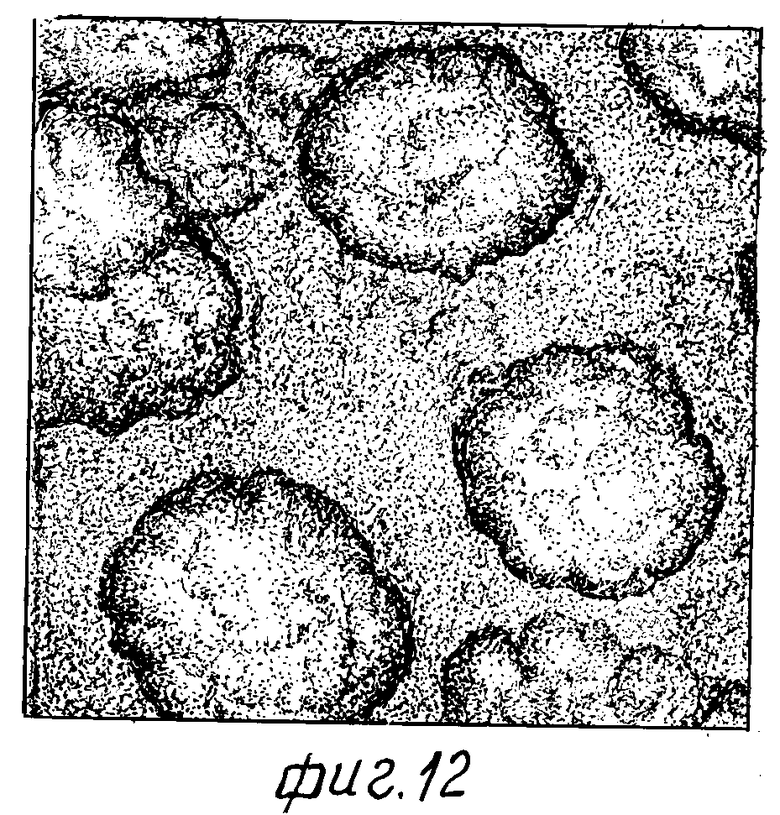
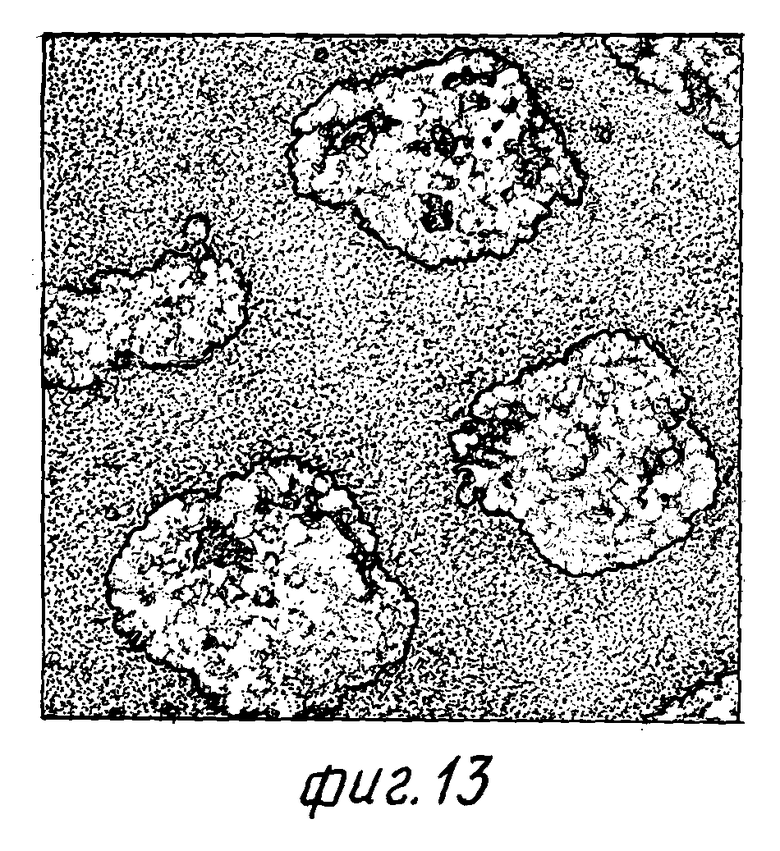
На фиг. 12, 13 изображен фрагмент поверхности матрицы золотых омических контактов, расположенных на GaAs подложке, причем на фиг. 12 изображена карта рельефа поверхности, а на фиг. 13 изображена карта значений электрического туннельного тока между поверхностью и зондом при разности потенциала между ними в 1 вольт.
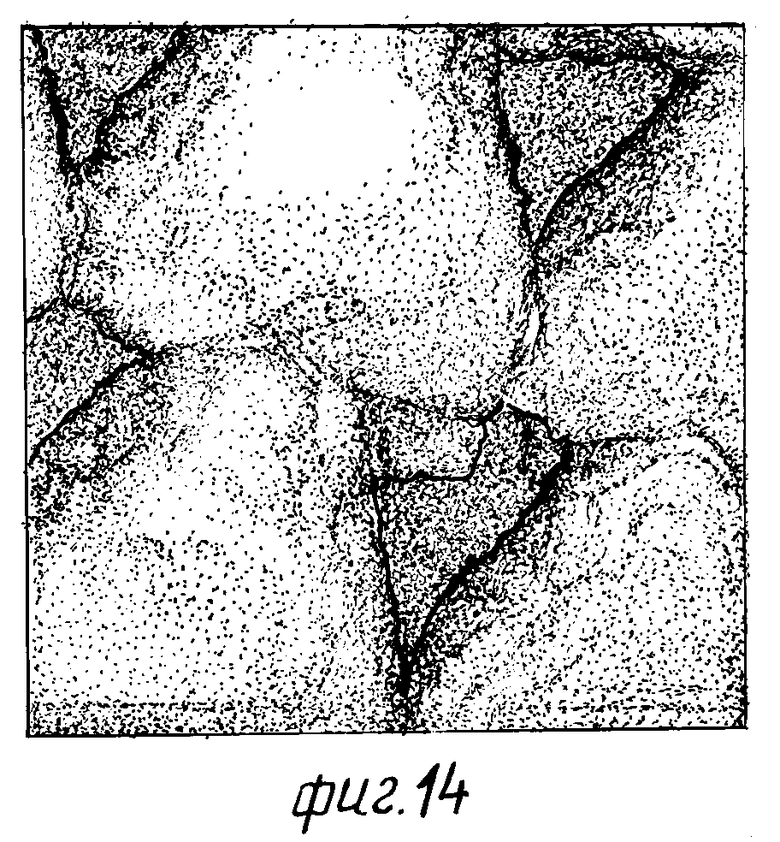
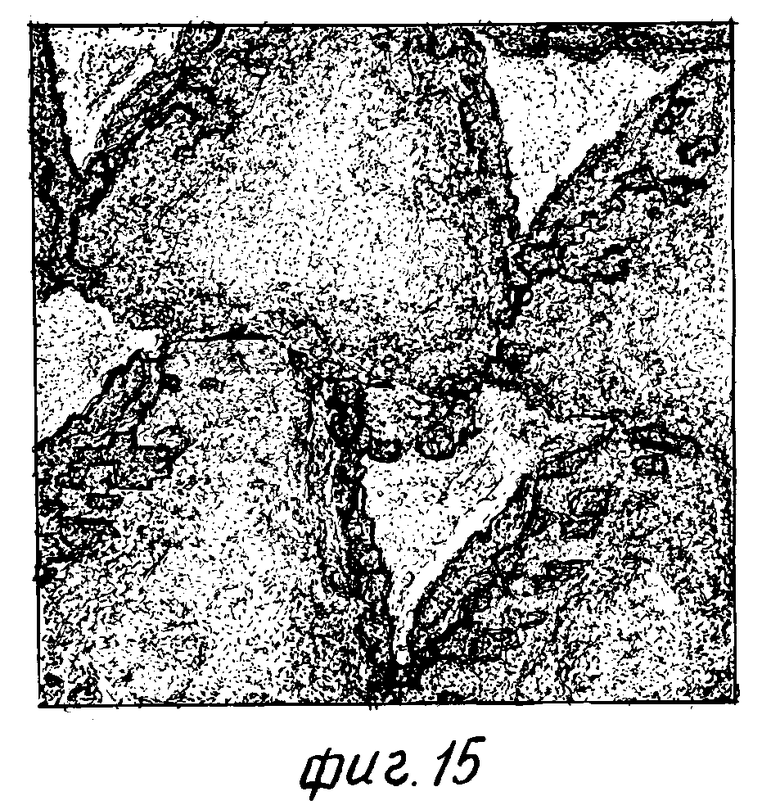
На фиг. 14, 15 изображен фрагмент поверхности матрицы треугольников из полиметилметакрилата (ПММА) на кремниевой подложке, причем на фиг. 14 изображена карта рельефа поверхности, а на фиг. 15 карта электростатических взаимодействий между зондом и поверхностью в момент контакта при разности потенциала между ними в 1 вольт.
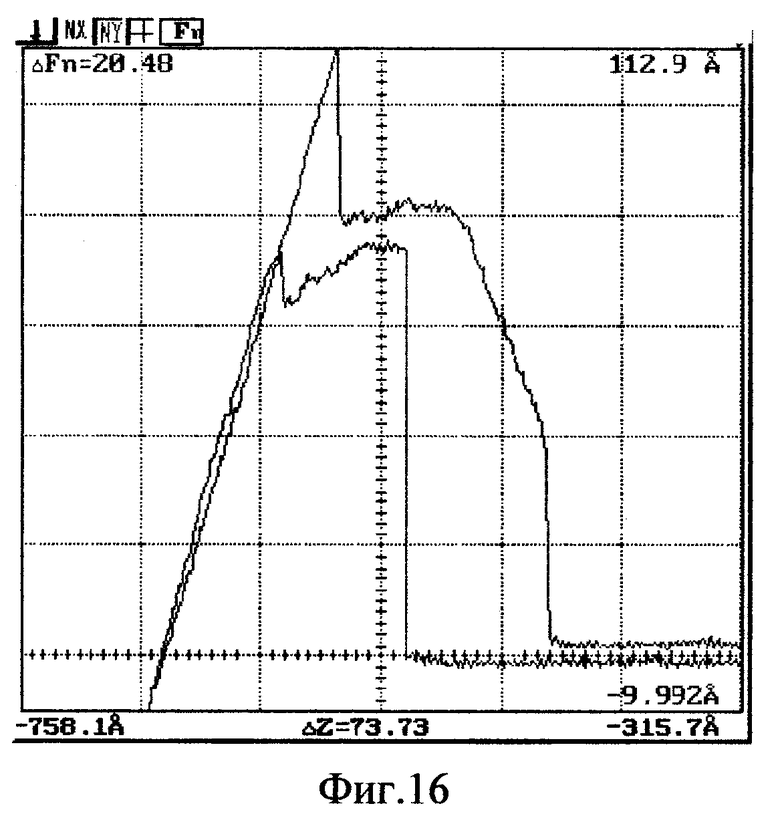
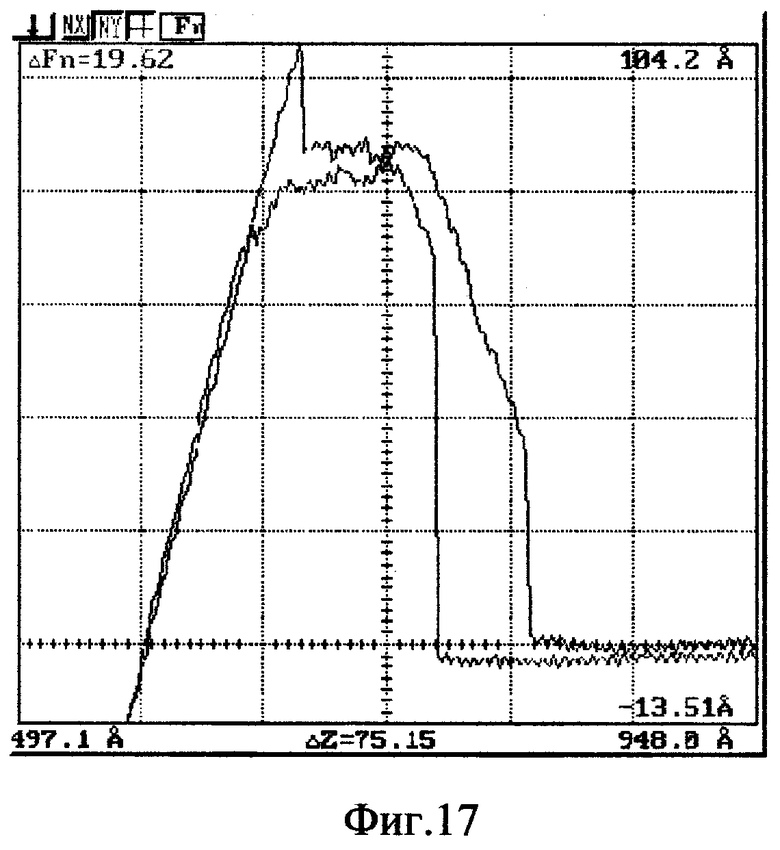
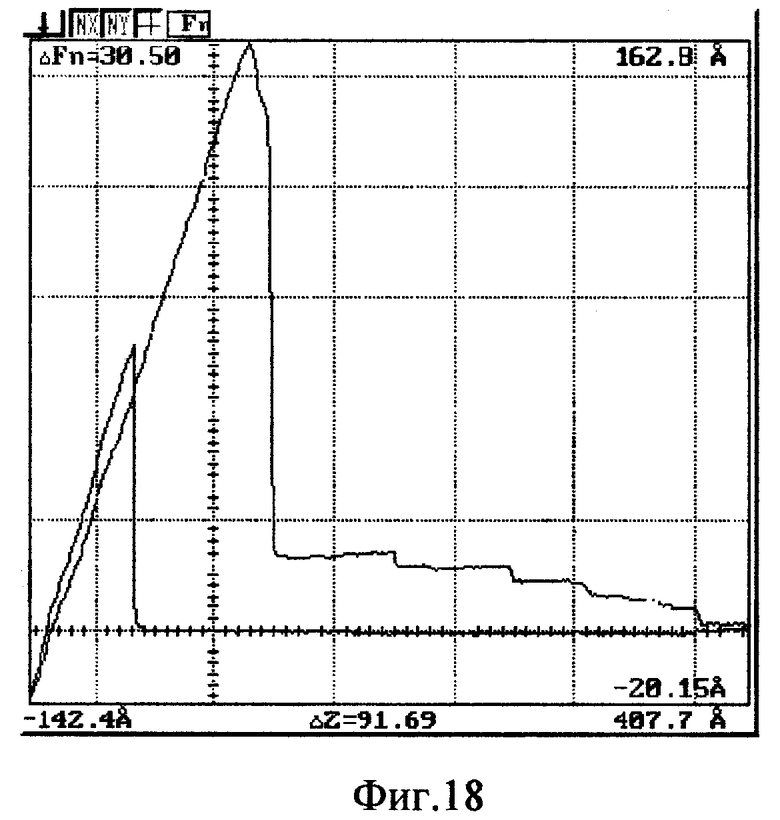
На фиг. 16-18 показаны экспериментальные силовые кривые, снятые на поверхностях, покрытых поверхностными слоями.
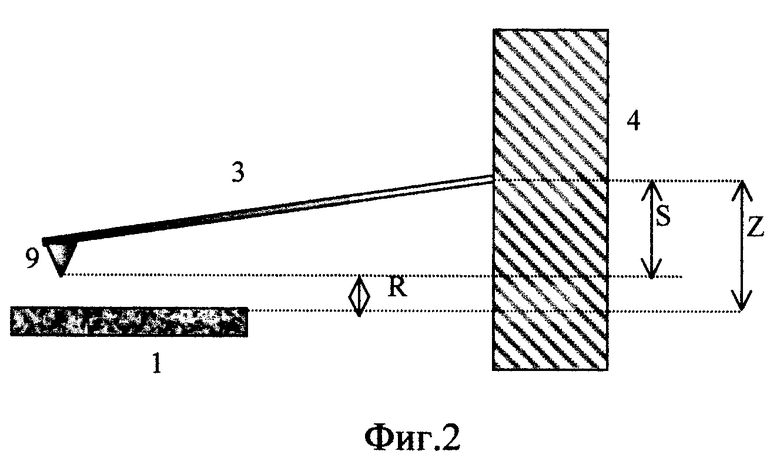
В устройстве, изображенном на фиг. 1, образец 1 размещен на трехкоординатном пьезоэлементе 2. Над поверхностью образца 1 размещен упругий кантилевер 3, закрепленный в опоре 4. Световой луч, излучаемый источником 5, отражается от кантилевера 3 и поступает на детектор 6, подключенный ко входу процессора 7, управляющего работой пьезоэлемента 2. Информационный выход процессора 7 соединен со входом блока отображения (дисплея, блока запоминания или индикации) 8. Зонд 9 размещен на свободном конце кантилевера 3. При этом необходимо учесть, что для осуществления предлагаемого способа можно воспользоваться любым известным AFM устройством, в том числе описанными в вышеназванных источниках информации.
Способ осуществляют следующим образом. В каждой точке исследуемого участка поверхности образца 1 снимается силовая кривая - зависимость величины изгиба кантилевера 3 (S на фиг. 3-5), на котором расположен зонд 9, от расстояния до поверхности образца 1, закрепленного в опоре 4 конца кантилевера 3 (Z на фиг. 2-5). Величина изгиба, пропорциональная действующей на кантилевер 3 силе межатомного взаимодействия F, регистрируется детектором 6 (он реагирует обычно на величину или угол отклонения кантилевера 3, которые пропорциональны вызвавшей их силе отклонения).
Информация с выхода детектора 6 подается в процессор 7, где обрабатывается с использованием предлагаемых или известных алгоритмов. Более того, приведенные ниже алгоритмы могут использоваться как непосредственно, так и как часть известных или для их корректировки. Более того, следует отметить, что, как станет ясно из дальнейшего, способ может быть осуществлен в "ручном" режиме, без использования процессора для обработки результатов измерений, а также в полуавтоматическом режиме, когда процессор используют только для построения распределений в выбранных оператором опорных точках.
В показанном на фиг.1 устройстве процессор управляет пьезоэлементом 2, который сначала приближает, а затем удаляет образец 1 от зонда 9 в точках сканирования, а также осуществляет само сканирование.
При сканировании выбранного участка исследуемого объекта в выбранных точках (или в каждой) осуществляется подвод кантилевера с зондом к поверхности до выполнения какого-либо заданного условия, например до достижения нулевого или отрицательного (обратного) отклонения кантилевера 3. После выполнения этого условия направление движения кантилевера 3 меняется на противоположное и продолжается на определенном расстоянии. Остановка зонда 9, как правило, производится после его выхода из области взаимодействий с исследуемым объектом. После прекращения движения производится перемещение зонда 9 в следующую точку сканирования и весь процесс повторяется. Во время подвода - отвода кантилевера 3 производится регистрация силовой кривой. Силовая кривая может заноситься в память и впоследствии или сразу же обрабатываться, т.е. на ней определяются заданные оператором точки или участки, определяются их параметры, если нужно производятся вычисления и результаты записываются в соответствующие файлы. Заданные оператором точки или участки также могут определяться, обрабатываться и запоминаться прямо по ходу регистрации силовой кривой при выполнении условий, определяющих эти точки или участки.
В процессе снятия силовой кривой фиксируются только пары значений или отдельные значения или производные в характерных точках, образующие множество аргументов. По зафиксированным значениям аргументов определяются (как именно будет пояснено ниже) значения параметров, характеризующих свойства исследуемой поверхности или объектов на ней. Каждому полученному значению функции ставятся в соответствие координаты точки исследуемой поверхности, однотипные значения со всех силовых кривых заносятся в отдельные файлы, формируя таким образом карты - изображения распределений значений соответствующих характеристик поверхности или лежащих на ней объектов по исследуемому участку.
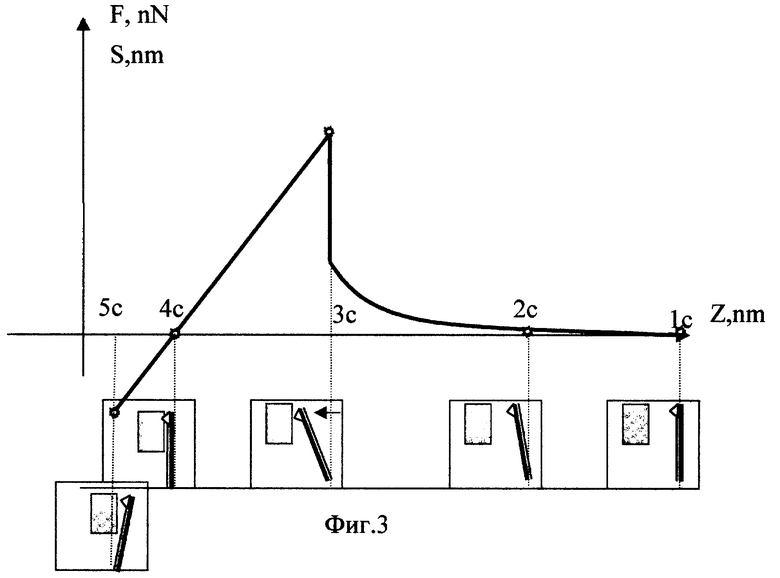
Рассмотрим силовую кривую более подробно (см. фиг. 3, 4, на которых силовые кривые изображены в координатах S, Z, а под ними показано положение кантилевера в некоторых характерных точках).
В точке 1c (на фиг. 3-5 индексом "с"("p") обозначены опорные точки и точка реверса, полученные в процессе сближения (разведения) образца 1 и зонда 9) зонд 9 (фиг. З) удален от поверхности образца 1 и не чувствует влияния поверхностных сил. При приближении к поверхности образца 1 на зонд 9 начинают действовать дальнодействующие силы и кантилевер 3 начинает изгибаться (точка 2c). Приблизившись достаточно к поверхности и попав под влияние значительных и резко меняющихся сил, зонд 9 скачком притягивается к поверхности, резко изгибая кантилевер 3 (точка 3c). Дальнейшее перемещение закрепленного конца кантилевера 3 к поверхности образца 1 будет уменьшать изгиб кантилевера 3 и в точке 4c он полностью выпрямится. При продолжении перемещения к поверхности начнется изгиб кантилевера в противоположную сторону. В точке 5c направление движения меняется на противоположное (точка реверса). Положение этой точки определяется оператором или процессором 7.
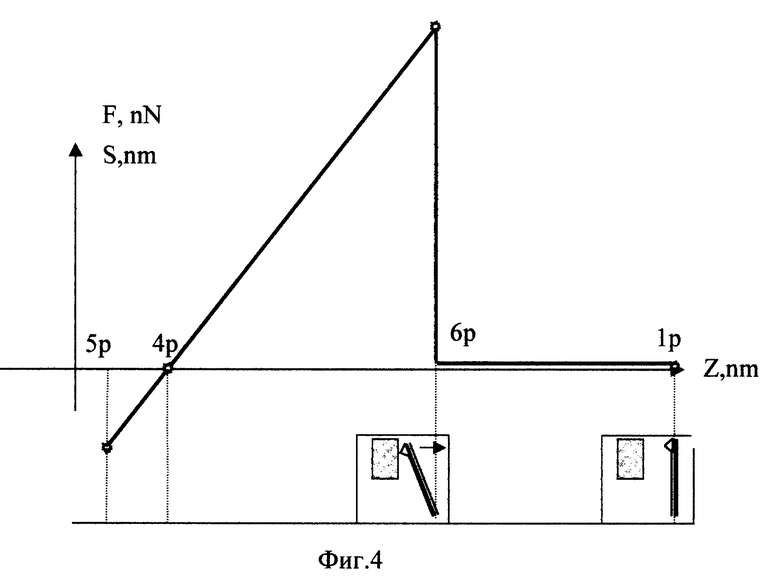
При удалении закрепленного конца кантилевера 3 от поверхности образца 1 (фиг. 4) происходит обратный процесс. Кантилевер 3 выпрямляется (точка 4p) и начинает изгибаться в сторону поверхности, т.к. поверхностные силы адгезии удерживают зонд 9 и не дают ему от нее оторваться. В конце концов сила упругости кантилевера 3 возрастает настолько, что преодолевает силу адгезии и зонд 9 отрывается от поверхности. Кантилевер выпрямляется (точка 6p). После выпрямления кантилевер отходит в точку 1p.
Из рассмотрения силовой кривой следует, что величина абсолютного максимума в точке 6p, выраженная в значениях силы, есть значение локальной силы адгезии в данной точке поверхности, т.е. силы, которая постоянно прижимает зонд 9 к поверхности. Причем значение этой силы измеряется непосредственно в точке изменения наклона или начала скачка силовой кривой.
Отрезки между точками 3c-5c и 5p-6p (фиг. 3, 4) отражают величину изгиба кантилевера (силу упругости отклонения кантилевера), когда зонд находится в непосредственном контакте с поверхностью. Эта часть силовой кривой называется контактной. Регистрируя значение абсциссы любой одинаково определенной точки на контактной части силовой кривой, можно получать информацию о топографии рельефа поверхности, т.к. координаты этих точек определяют вертикальное местоположение зонда 9 на поверхности при приложении к нему силы заданной величины (ордината точки, определяющая упругую силу кантилевера, плюс ордината точки 6p, определяющая поверхностную силу адгезии, также действующую в этот момент на зонд 9). Критерием выбора точки на отрезке может служить величина ее ординаты. При этом преимущество предлагаемого способа заключается в том, что в каждой точке поверхности образца 1 в одном измерительном процессе регистрируется минимальный набор величин, в простейшем случае, например, рельеф поверхности и величина силы адгезии. Эта сила может быть неравномерно распределена по поверхности и достигать значительных величин, внося существенную погрешность в измерения рельефа в известных способах. При использовании предлагаемого способа, пройдя полностью силовую кривую и зафиксировав рельеф и величину силы адгезии, можно точно определить величину суммарной силы, с которой зонд действовал на поверхность в регистрируемой точке (сумму силы адгезии и силы упругости кантилевера) и рассчитать корректирующую поправку для измеренного значения, или же при вторичном снятии силовой кривой в той же точке поверхности произвести корректировку координаты выбранной точки измерения согласно определенной величине силы адгезии. Иными словами, измерения топографии рельефа поверхности можно производить более точно, без погрешностей, вызываемых влиянием поверхностной силы адгезии.
Движение в направлении поверхности при снятии силовой кривой производится до достижения определяемой оператором величины силы изгиба кантилевера, если это необходимо, то запоминается координата закрепленного конца кантилевера, а затем происходит перемена направления движения - реверс, что предотвращает повреждение зонда 9.
Регистрируя абсциссу точки 3c - токи прилипания зонда к поверхности, можно регистрировать данные, по сути аналогичные данным, получаемым вибрационными методами. Однако эти данные несут информацию не только о рельефе поверхности, но и о мягких и подвижных молекулярных слоях, лежащих на поверхности. Гораздо информативнее измерять расстояние между абсциссами точки 4c или точки, выбранной для получения информации о рельефе, и точки 3c. Таким образом, можно получить чистую информацию о толщине молекулярных слоев на поверхности, отделив ее от информации о топографии рельефа.
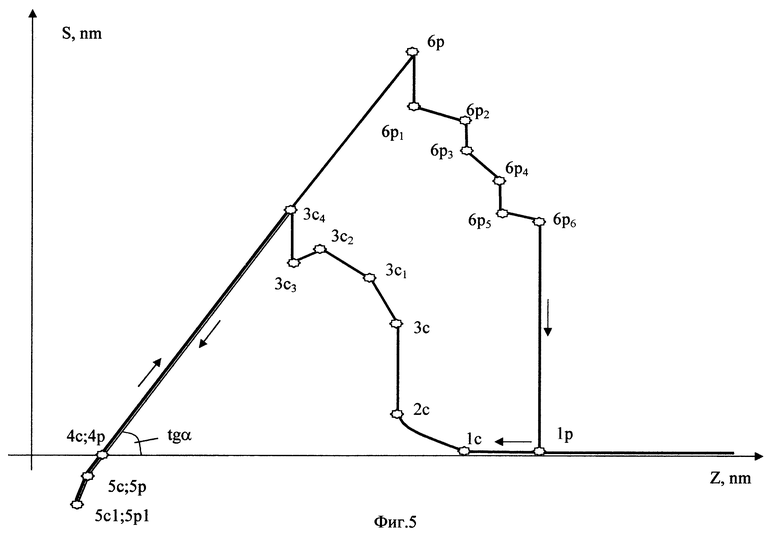
Наличие адсорбированных молекулярных слоев или слоев, нанесенных каким либо образом изменяют вид силовой кривой (фиг. 5). Так, слои, беспрепятственно пропускающие зонд 9, будут изменять расстояние между точками 3c и 4c. Зонд 9 может прилипать сначала к молекулярному слою, проходить сквозь него, а затем прилипать уже к поверхности образца 1. Может происходить деформация поверхностных слоев зондом 9 с последующим их прорывом или без. Молекулярные слои могут деформироваться и сами двигаться навстречу зонду. Все эти явления будут отражаться на силовой кривой в промежутке между точками 2c-3c4. Производя математические операции над координатами силовой кривой в опорных точках, соответствующих этим областям, фиксируя координаты граничных точек квазипрямолинейных отрезков, измеряя расстояния между ними и наклоны этих отрезков, можно определять координаты относительно поверхности, свойства и толщины этих слоев и получать распределения этих величин по исследуемому участку поверхности. Проводя повторные снятия силовой кривой, можно, выдерживая временную паузу, определять характер их деформации и значение коэффициента диффузии.
Наклон отрезков контактной части силовой кривой между точками 3c4-4c-5c1 и 5p1-6p (фиг. 5), т.е. в области кривой, где зонд контактирует с поверхностью, определяет ее эластичные (механические) свойства. Зная коэффициент упругости кантилевера, материал зонда и площадь контакта можно определить модуль Юнга материала контактирующей площадки поверхности и тем самым идентифицировать ее состав. Можно также определять коэффициент упругости поверхности, используя только значение коэффициента упругости кантилевера и угол наклона контактной части силовой кривой или просто угол наклона. Измеряя этот угол (угол наклона, тангенс угла наклона), можно получать карты упругих свойств исследуемых участков поверхности. При исследовании поверхности, состоящей из нескольких слоев с различными эластичными свойствами или покрытой какими-либо плотными упругими слоями, способными препятствовать прохождению зонда 9 сквозь них, на контактной части силовой кривой появятся отрезки, соответствующие этим слоям, наклоны которых отражают их эластичные свойства, а проекции на ось Z - их толщину (см. фиг. 5 точки 5c, 5p и 5c1, 5p1). Аналогично для более "нежных" надповерхностных слоев. Проходя сквозь них или деформируя их зонд 9 испытывает с их стороны сопротивление, которое отражается на наклоне соответствующего участка силовой кривой. И таким образом, величина этого наклона отражает их эластичные (механические) свойства. Если зонд 9 прорывает какой-либо слой, на силовой кривой появляется характерный проскок (скачок вверх). Если при контактном взаимодействии зонда 9 с поверхностью имеют место необратимые изменения, контактная часть силовой кривой, снимаемая при движении кантилевера 3 в направлении от поверхности, будет отличаться от соответствующей области силовой кривой, снимаемой при сближении образца и зонда. Таким образом, измеряя в процессе сканирования координаты опорных точек, ограничивающих отрезки с различным наклоном, можно следить за изменением упругих свойств поверхностных слоев и их толщинами. Регистрируя точки прорыва слоев или несовпадения выбранных частей кривых подвода и отвода кантилевера 3, можно определять поврежденные при сканировании участки.
Очевидно, что при одинаковом силовом воздействии зонда 9 на поверхность, но при разных упругих свойствах последней (что может нередко случаться в пределах выбранного участка сканирования), величина поверхностной деформации будет различна, что в известных способах приводит к искажениям регистрируемого рельефа, вызванным его упругими свойствами. В предлагаемом способе эти искажения можно корректировать, измеряя коэффициент упругости поверхности (угол наклона контактной части силовой кривой) в той же точке вместе с измерениями рельефа поверхности.
При перемещении кантилевера 3 в направлении от поверхности происходят процессы выхода зонда 9 из поверхности (подповерхностных слоев) и слоев, покрывающих ее (надповерхностных). Если при сближении имела место только упругая деформация (не происходило необратимых процессов), то вид силовой кривой выхода в нижней части контактной области будет совпадать с кривой входа. В противном случае указанные участки будут различаться. При прохождении точки 3c, в которой зонд 9 прилипает к поверхности образца 1, отрыва от нее обычно не происходит, т.к. зонд 9 продолжают удерживать силы адгезии. Поэтому силовая кривая будет идти вверх - изгиб кантилевера 3 будет увеличиваться. Если поверхность или слой, лежащий на ней, будет деформироваться вслед за перемещением кантилевера, эта деформация проявиться как изгиб или излом силовой кривой выше точки 3c. Наклон этой области будет зависеть от эластичных свойств контактирующей с зондом 9 площадки. Отрывы зонда 9 от поверхности образца 1 и от каких-либо надповерхностных слоев, а также разрывы связей, на силовой кривой обычно выглядят скачками перпендикулярно вниз (от поверхности).
После того как зонд 9 оторвется от поверхности (точка 6p на фиг. 5), он должен пройти сквозь молекулярные слои, лежащие на ней. Эти слои могут затормозить прохождение зонда 9, тянуться за ним. На силовой кривой это выглядит в виде характерной полочки или ряда полочек, расположенных после точки 6p (фиг. 5) отрыва зонда 9 от поверхности. Отрыв зонда 9 от этих слоев на силовой кривой может отражаться либо резким скачком вниз, аналогичным отрыву зонда от поверхности, либо многоступенчато, когда разрываются поочередно какие-то связи, либо плавным спадом в нуль, когда молекулы слоя "стекают" с зонда 9, освобождая его. Значения ординат точек, выраженные в единицах силы и измеренные непосредственно в моменты отрыва от слоев, на границах слоев и в моменты разрывов рвущихся связей, непосредственно определяют величины сил взаимодействия между зондом и поверхностными слоями, т.е. определяют адгезионные свойства поверхностных слоев и величины рвущихся связей. Выделяя опорные точки (характерные участки) обратной ветви силовой кривой, измеряя их координаты, наклоны и проекции отрезков, а также изгибы, можно также определять эластичные свойства поверхностных слоев, характеризовать межмолекулярные связи.
Очевидно, что при сложном характере силовой кривой величина суммарной силы адгезии будет определяться как максимальное значение величины изгиба кантилевера при перемещении его в направлении от поверхности.
Что касается определения координат опорных точек, можно просто приравнивать их соответствующим значениям координаты Z (т.е. проектировать на ось абсцисс). Однако более точно можно определять их по формуле R=Z-S, где R - координата точки на силовой кривой (зонда 9), Z - координата закрепленного конца кантилевера 3, S - величина отклонения (изгиба) кантилевера 3, которая в свою очередь равна силе отклонения кантилевера 3 умноженной на его коэффициент упругости. Знак этой величины зависит от направления изгиба кантилевера 3. При изгибе в сторону от поверхности формула будет иметь вид R=Z+S.
Следует отметить, что ось абсцисс мы рассматриваем привязанной к образцу и считаем, что при относительном сближении зонда и образца изменяется координата закрепленного конца кантилевера. Разумеется, если систему координат связать с кантилевером, переменной станет координата образца.
Измерение координаты поверхности, как было отмечено выше, можно производить в любой точке контактной части силовой кривой. Наиболее просто выбирать критерий S= 0 или S=A или S=-A (где A - задаваемое пороговое значение). Так же можно использовать в качестве критерия начало участка, где Z - S = const (начало контактного участка) или конец этого участка. Точные координаты поверхности, недеформированной зондом, с учетом описанных выше поправок вычисляются по вышеприведенной формуле:
Roay=Ro+Fac/Kp+So(Kk/Kp).
Выявлять изменяющиеся в процессе измерений участки исследуемой поверхности и молекулярных слоев, расположенных на ней, можно путем измерения силовой кривой в каждой точке поверхности повторно, регистрируя разность между координатами соответствующих опорных точек или значениями производных в них или сравнивая толщины соответствующих слоев. Более того, вторичное снятие силовой кривой в одной и той же точке можно использовать для измерения магнитных или электростатических взаимодействий на заданном расстоянии от поверхности или в непосредственной близи от нее. При этом при первом снятии силовой кривой определяется координата Z точки прилипания зонда к поверхности - точки 3c и координата самой поверхности - точка 4c, а при втором проходе, не доходя до точки границы поверхности (и до точки прилипания) заданное расстояние, измеряются магнитные или электростатические силы взаимодействия. При этом существенно, что расстояние до точки измерений поддерживается относительно поверхности, а не относительно точки прилипания, как в известных способах, и поддерживается более точно, т.к. временной интервал между определением координаты поверхности и проведением самого измерения в этом случае оказывается минимально возможным, что резко снижает изменение расстояния, вызываемое возможным дрейфом.
В ряде случаев для проведения таких или подобных им измерений не обязательно производить снятие силовой кривой вторично. Достаточно запомнить значения кривой, выбрать на ней точку, находящуюся над поверхностью на требуемом расстоянии, и занести измеренное значение в соответствующий файл. Это позволяет фиксировать величины значений магнитных или электростатических взаимодействий в непосредственной близи от поверхности, регистрируя значения, например, измеренные в точке, предшествующей точке прилипания, что невозможно в известных способах.
Повторное снятие силовой кривой в одной и той же точке поверхности образца 1, но с измененным электрическим потенциалом на зонде 9, который в этом случае выполняют из проводящего материала, позволяет различать электрические заряды, объекты и различные фазы поверхности по их электрическим свойствам. Различия во взаимодействиях электрического поля зонда 9 с поверхностями с различными электрическими характеристиками особенно ярко проявляется при регистрации разности соответствующих величин, получаемых при снятии силовых кривых при различных потенциалах на зонде 9 или при потенциале и без него. Сравниваться могут любые точки, отрезки, углы или другие параметры силовой кривой по выбору оператора, причем, если зонд расположен на поверхности (контактная часть силовой кривой), то из электростатических взаимодействий практически исключаются соответствующие взаимодействия, вызванные надповерхностными слоями, которые зонд уже прошел, а если зонд находится на некотором расстоянии от поверхности, то во взаимодействия включается вклад надповерхностных слоев, располагающихся в данный момент между зондом и поверхностью. Для вычисления величины поверхностного заряда или диэлектрической проницаемости могут быть использованы следующие соображения.
Рассмотрим простейший случай, когда поверхность проводящая. При первом снятии силовой кривой потенциал на зонде равен нулю, а при втором равен U. При вычитании из значений ординат точек вторичного снятия ординаты точек первичного снятия получим силовую кривую только электростатической составляющей силы. Сила электростатического взаимодействия Fэ определяется выражением:
Fэ(U)=(K/Ee)•U•(U+Q)/(2R)2
где К - константа, Ее - диэлектрическая проницаемость материала поверхности и слоя (или без слоя, это зависит от точки измерения), Q - заряд на поверхности образца, R - координата точки измерения относительно поверхности.
Из этой формулы выводим Ee=(K/Fэ(U))•U•(U+Q)/(2R)2.
Если поверхностного заряда нет, то значения диэлектрической проницаемости поверхности и поверхностных слоев можно получить из соответствующих точек силовой кривой. Если же поверхностный заряд присутствует, то можно снятие силовой кривой повторить либо при другом значении потенциала, либо при том же, но другой полярности (в этом случае будет дополнительно идентифицирован знак заряда). В результате получим еще одно уравнение, и из этих двух уравнений найдем два неизвестных - Ее и Q.
Для получения некоторой контрастной картины, отражающей электрические свойства поверхности и слоев достаточно одного или двух измерений (см. фиг. 15).
Таким образом, в отличие от известных способов, предлагаемый способ позволяет регистрировать чисто электростатические взаимодействия отдельно от межмолекулярных, определять из этих взаимодействий значения диэлектрической проницаемости и поверхностных зарядов в отдельности, и разделять вклады в эти взаимодействия, вносимые поверхностью и надповерхностными слоями в отдельности.
Определять различия электрических характеристик различных областей исследуемого участка можно и при одиночном измерении силовой кривой в каждой точке. При этом производят модуляцию величины или полярности электрического потенциала на зонде 9 гармоническим или прямоугольным сигналом либо на всей кривой, либо на определенных ее участках (точках). Разница в амплитудах измеряемого сигнала в разных точках поверхности будет свидетельствовать о различии электрических характеристик в этих точках.
Наличие электропроводящего зонда 9 дает также возможность наблюдать зависимость величины туннельного тока от положения зонда 9 относительно поверхности образца 1. Т.е. каждой точке силовой кривой ставится в соответствие значение величины туннельного тока, измеряемого зондом в этих точках. Это дает возможность при сканировании снимать карты электропроводности поверхности в характерных, информационно значимых точках силовой кривой (см фиг. 12, 13).
Аналогично использованию проводящего зонда можно использовать зонд, чувствительный к какой-либо иной физико-химической характеристике поверхности. Так, можно применять магнитный, термопарный, емкостной, оптический и т.п. зонды.
Можно также измерять величину изгиба кантилевера не только по нормали к поверхности, но и в перпендикулярном направлении.
В зависимости от свойств, размеров и характеристик поверхности, объектов, находящихся на ней, окружающей среды и зонда 9 (кантилевера 3, микроскопа в целом) вид силовой кривой может изменяться и не совпадать с видом кривой, изображенной на фиг. 5. На кривой могут появляться изломы, ступени, пики, неровные участки, изменения углов и наклонов, округления острых углов и т. д. Все эти особенности несут определенную информацию, и с помощью предлагаемого способа любую особенность можно выделить и получить карту распределения ее на исследуемом участке поверхности. В частности, проекция разности между ветвями силовой кривой, полученными при сближении и разведении образца 1 и зонда 9, на ось S на участке 3c4-4c-5c-5c1-5p1-5p-4p-6p может интерпретироваться как величина остаточной деформации в соответствующих точках. Разумеется, при определении разности или сопоставлении используются одноименные значения, однотипные параметры, величины, относящиеся к одним и тем же опорным точкам.
Отсутствие необходимости использования электронной системы обратной связи, систем синхронного и фазового детектирования упрощает осуществление способа, исключает наличие артефактов, обусловленных конечной скоростью отработки указанных систем и процессами релаксации в них, что повышает достоверность получаемых данных.
Переходя к рассмотрению примеров осуществления способа, заметим, что число возможных алгоритмов или вариантов способа чрезвычайно велико, однако каждый вариант может без труда быть осуществлен с использованием общеизвестных приемов, поскольку выше были заданы измеряемые величины, фиксируемые в опорных точках, выражения для расчета искомых величин (частично они просто совпадают с зафиксированными), заданы и условия выбора опорных точек, определены правила интерпретации распределений. Иными словами, каждое сочетание указанных величин, выражений и правил задает один из возможных вариантов осуществления способа.
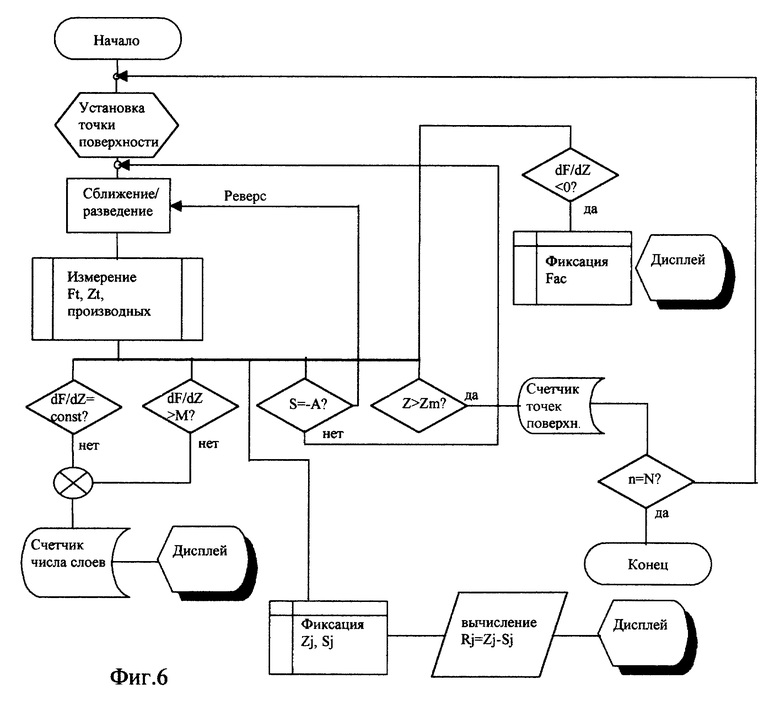
На фиг. 6 показан простейший алгоритм (блок-схема) пошагового осуществления одного из возможных вариантов предлагаемого способа. После установки зонда 9 над первой точкой контролируемой поверхности начинается сближение образца 1 и зонда 9, сопровождающееся измерением текущих значений Ft (St), Zt, dF/dZ (в простейшем случае значения производной принимаются равными разности соседних значений Ft), d2F/dZ. При выполнении условия dF/dZ ≠ const или d2F/dZ ≠ 0 (> C, где C - некоторая пороговая величина), т.е. достижении опорной точки, сигнал через блок отбора (элемент И) поступает на счетчик числа слоев. Этот счетчик сбрасывается в нуль после установки над очередной контролируемой точкой поверхности и его показания отображаются (заносятся в память) в момент реверса (соответствующие связи на фиг. 6 не показаны). Блок отбора отсекает сигналы, относящиеся к квазивертикальным участкам силовой кривой, так что начальные точки квазивертикальных участков при подсчете числа слоев не учитываются.
Одновременно с фиксацией факта прохождения слоя, фиксируются соответствующие величины Zj и Sj, после чего вычисляется и отображается Rj = Zj-Sj, где Rj - координата границы j-го слоя.
В момент выполнения условия S = -A фиксируется координата поверхности образца 1 и осуществляется реверс направления движения, сближение образца 1 и зонда 9 сменяется их разведением (взаимным удалением), которое продолжается до достижения точки Zm, достаточно удаленной от поверхности образца. Зонд 9 устанавливается над новой точкой поверхности и процесс сканирования продолжается до выполнения условия n=N, т.е. до прохождения всех контролируемых точек. В результате может быть получена карта, отражающая количество слоев на поверхности, карты поверхностных слоев (каждого в отдельности) и рельефа поверхности, показанная на фиг. 9. На обратной ветви силовой кривой в рассматриваемом примере фиксируется только точка абсолютного максимума, сила отклонения кантилевера 3 в которой равна суммарной силе адгезии Fac, распределение которой показано на фиг. 11.
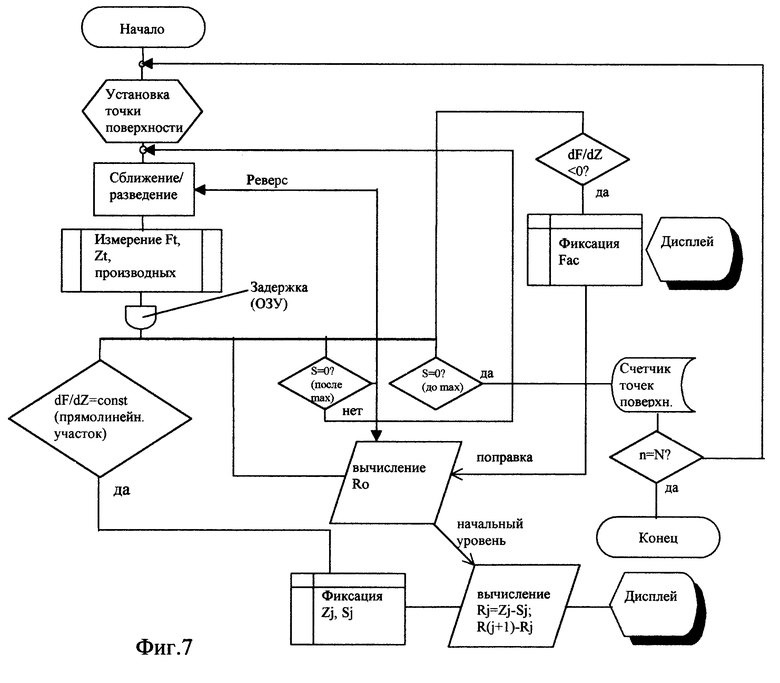
В примере, показанном на фиг. 7, измеренные значения силы отклонения кантилевера 3 и координаты его закрепленного конца заносятся в ОЗУ, где хранится и непрерывно обновляется участок силовой кривой. Это позволяет выделить квазипрямолинейные участки, граничные точки которых фиксируются в качестве опорных. Кроме того, в отличие от варианта, показанного на фиг. 6, реверс происходит при нулевом отклонении кантилевера 3 после прохождения абсолютного максимума силы отклонения в процессе сближения, а повторное достижение нулевого отклонения после прохождения абсолютного максимума силы отклонения в процессе разведения образца 1 и зонда 9 фиксируется как окончание процесса снятия силовой кривой в данной точке поверхности. Помимо этого, величина Fac используется для выработки поправки к координате поверхности, которая, в свою очередь, служит точкой отсчета для границ слоев. Результатом этого алгоритма являются карта рельефа поверхности (фиг. 9), карты рельефов поверхностных слоев относительно поверхности (фиг. 10) и карта распределения силы адгезии (фиг. 11).
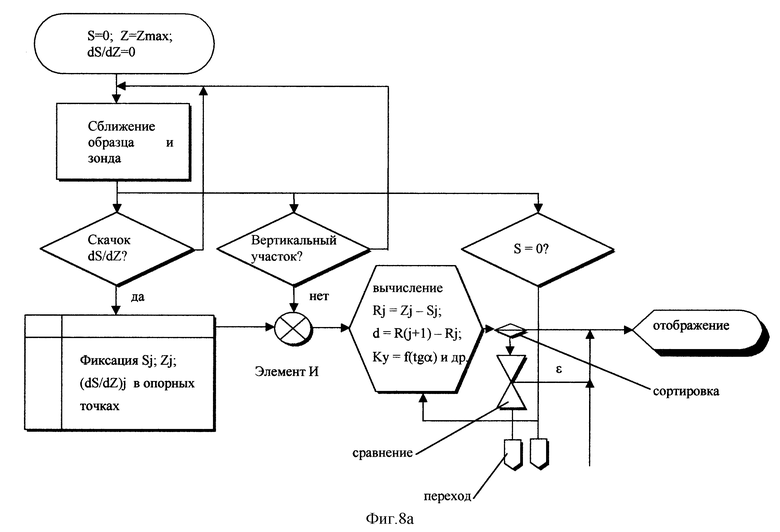
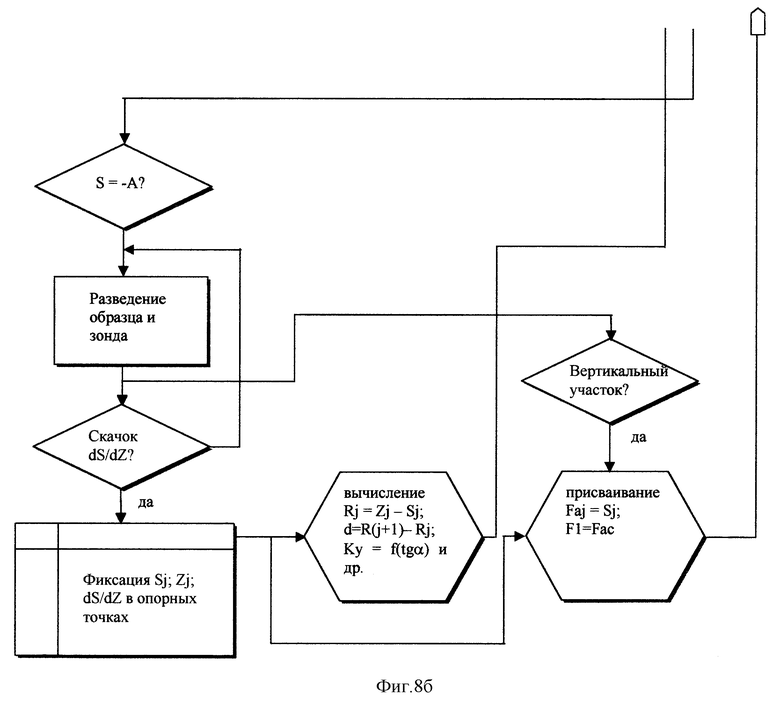
И, наконец, особенностью блок-схемы по фиг. 8 (а, б) является дополнительное определение толщины поверхностных слоев, их упругих свойств и упругих свойств поверхности, а также сравнение (определение разности, свидетельствующей о наличии неупругой деформации или вычисление среднего арифметического с целью снижения случайной составляющей погрешности) данных, полученных в процессе сближения и разведения образца 1 и зонда 9.
Разумеется, приведенные алгоритмы не следует рассматривать в качестве электрических схем или программ, а также в качестве вариантов осуществления, дающих наибольший эффект. Однако приведенные примеры, являясь блок-схемами, дают исчерпывающее представление о правилах и приемах построения схем и программ с использованием данного описания.
Таким образом, предлагаемый способ обеспечивает более широкие функциональные возможности за счет получения контрастных послойных распределений и карт, привязанных к рельефу поверхности при одновременном повышении точности и достоверности измерительной информации. Способ характеризуется также высокой производительностью и простотой реализации, поскольку объем измеряемой информации в нем минимизирован и вся она получается в процессе однократного снятия силовой кривой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ПОВЕРХНОСТИ ОБРАЗЦА | 2012 |
|
RU2516022C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРИПОВЕРХНОСТНОГО МАГНИТНОГО ПОЛЯ С ИСПОЛЬЗОВАНИЕМ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2000 |
|
RU2193769C2 |
| СПОСОБ ИССЛЕДОВАНИЯ БИОСОВМЕСТИМОСТИ СИНТЕТИЧЕСКОГО МАТЕРИАЛА МЕДИКО-БИОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ С БИОЛОГИЧЕСКИМИ ТКАНЯМИ | 2007 |
|
RU2381485C2 |
| СПОСОБ АНАЛИЗА ТРЕНИЯ С ИСПОЛЬЗОВАНИЕМ АТОМНО-СИЛОВОЙ МИКРОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2364855C1 |
| ЗОНД ДЛЯ АТОМНОГО СИЛОВОГО МИКРОСКОПА | 2004 |
|
RU2356110C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПОЛУКОНТАКТНОГО РЕЖИМА С ФИКСИРОВАННЫМ ПИКОМ СИЛЫ ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОБРАЗЦА | 2011 |
|
RU2571446C2 |
| Способ оценки параметров профиля поверхности на основе вероятностно-статистической классификации спектра профилограммы | 2019 |
|
RU2708500C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
| Способ визуализации вируса гриппа | 2017 |
|
RU2649763C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГОСТИ КЛЕТОК КРОВИ | 2011 |
|
RU2466401C1 |
Способ включает последовательное снятие в заданных точках поверхности по меньшей мере участка силовой кривой и определение по нему параметров образца с последующим построением соответствующих пространственных распределений. На силовой кривой производят выбор опорных точек и фиксируют по меньшей мере в этих точках значения силы отклонения кантилевера, и/или координаты его закрепленного конца, и/или производных от силы отклонения кантилевера по координате его закрепленного конца. По числу опорных точек и/или указанным зафиксированным значениям определяют параметры образца, характеризующие рельеф, и/или свойства поверхности образца, и/или число и свойства его поверхностных слоев. В том числе определяют координаты поверхности образца, и/или границ поверхностных слоев, или толщины поверхностных слоев, или силу адгезии поверхности образца и/или поверхностных слоев, или коэффициент упругости поверхности образца, и/или поверхностных слоев. Обеспечивается расширение функциональных возможностей, повышение точности и достоверности полученной информации, повышение производительности и информативности. 29 з.п.ф-лы, 18 ил.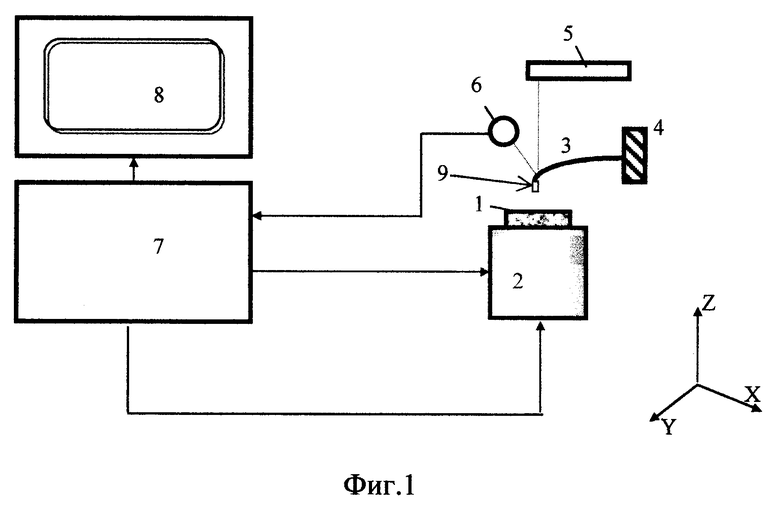
Rо = Zo - So,
где Rо - координата поверхности образца;
Zo, So - координата закрепленного конца кантилевера и величина отклонения его свободного конца в момент достижения силой отклонения кантилевера значения, равного 0 или -А при сближении образца и зонда и 0 или +А при разведении образца и зонда соответственно;
А - положительная постоянная величина.
Zt - St = const,
где Zt и St - текущие значения координаты закрепленного конца кантилевера и величины отклонения его свободного конца соответственно.
Ri = Zi - Si, Di = [R(i+1) - Ri],
где Ri и Di - координата границы i-го слоя и его толщина соответственно, i = (0,1,2...);
Zi, Si - координата закрепленного конца кантилевера и величина отклонения его свободного конца в соответствующей опорной точке, не включая начальные точки квазивертикальных участков при сближении образца и зонда и конечных точек квазивертикальных участков при разведении образца и зонда.
R'i = Zi - Si - Ro, Di = [R'(i+1) - R'i],
где R'i и Di - координата границы i-го слоя относительно поверхности образца и его толщина соответственно, i = (0, 1, 2...),
Zi, Si - координата закрепленного конца кантилевера и величина отклонения его свободного конца соответственно в соответствующей опорной точке, не включая начальные точки квазивертикальных участков при сближении образца и зонда и конечных точек квазивертикальных участков при разведении образца и зонда.
Rоа = Ro + Fас/Kp,
где Rоа - координата поверхности образца с поправкой на действующую между зондом и поверхностью суммарную силу адгезии;
Fас - суммарная сила адгезии поверхности образца;
Kp= Kk*tgα/(1-tgα),
Kk - коэффициент упругости кантилевера на изгиб,
tgα - тангенс угла наклона силовой кривой в окрестности точки Zо.
Rоу = Ro + Sо(Kk/Kp) при Ro = Zо - Sо,
Rоу = Zt - St + St (Kk/Kp) при Zt - St = const,
где Rоу - координата поверхности.
Ki= B*Kk*tgαi(1-tgαi),
где Ki - коэффициент упругости i-го слоя;
tgαi - тангенс угла наклона участка силовой кривой, расположенного между соответствующими опорными точками;
В - коэффициент пропорциональности.
Kp= K
где Kp - коэффициент упругости поверхности образца.
| US 5477732 A, 26.12.95 | |||
| US 5329808 A, 19.07.94 | |||
| US 5804708 A, 08.09.92 | |||
| RU 95108587 A1, 20.08.96. |

