Изобретение относится к области экспериментального судостроения и моделизма.
Известен подводный аппарат, содержащий полый корпус в форме двояковыпуклой линзы с гребными винтами, рубкой управления, рулем, окнами, люком, элементами крепления к дну акватории и сквозным каналом, в котором расположен движитель в виде винта Архимеда с возможностью реверсивного вращения и обеспечения движения подводного аппарата по вертикали [1].
Задачей изобретения является расширение ассортимента подводных аппаратов для небольших глубин.
Технический результат достигается тем, что в подводном аппарате, содержащем полый корпус в форме двояковыпуклой линзы с гребными винтами, рубкой управления, рулем, окнами, люком, элементами крепления к дну акватории и сквозным каналом, в котором расположен движитель в виде вита Архимеда с возможностью реверсивного вращения и обеспечения движения подводного аппарата по вертикали, сквозной канал выполняет функцию оси вращения, по крайней мере, одного ротора, а гребные винты установлены напротив друг друга по периметру корпуса неподвижно на кронштейнах с возможностью изменения частоты их вращения.
На фиг.1 изображен подводный аппарат, вид сбоку, на фиг.2 и 3 - соответственно, виды на фиг.1 сверху и снизу, на фиг.4 представлена схема установки ротора на сквозном канале, выполняющем функцию оси вращения.
Подводный аппарат предназначен для использования в речной, озерной, морской акватории А. Аппарат может находиться как в состоянии плавания по поверхности В акватории и на небольших глубинах, так и временного закрепления к дну акватории.
Подводный аппарат содержит корпус 1, имеющий форму двояковыпуклой линзы со стенками 2 (верхней) и 3 (нижней), полостью 4 и сквозным круглого сечения каналом 5 в центре. Корпус имеет рубку 6 управления с окнами 7 наблюдения, руль 8. На верхней стенке корпуса расположен герметичный люк 9 для входа/выхода экипажа, выполнения грузовых операций. На нижней стенке корпуса расположены выдвижные элементы 10 крепления к дну акватории, убирающиеся в желоба 11. В канале установлен движитель 12, выполненный в виде винта Архимеда (шнека), имеющего возможность реверсивного вращения от привода 13. Канал сверху и/или снизу может иметь ограждающую решетку (не показана). По периметру корпуса установлены неподвижно на кронштейнах 14 гребные винты 15 и 16, расположенные один напротив другого. Приводы гребных винтов (не показаны) выполнены с возможностью изменения частоты их вращения. В полости корпуса горизонтально установлен с возможностью вращения, например, от привода 17, по меньшей мере, один ротор 18, состоящий из втулки а, тонкостенного держателя b и массивного обода с. Ротор установлен на подшипнике d, причем канал выполняет функцию оси вращения.
Подводный аппарат 1, имеющий форму двояковыпуклой линзы со стенками 2 и 3 и полостью 4, помещают в условия акватории А, где он находится, например, в состоянии плавающего на поверхности В объекта. Через люк 9 производят загрузку/разгрузку аппарата, после чего экипаж из рубки 6 управления, включает привод 13 движителя (винта Архимеда) 12 «на погружение» и поддерживает частоту его вращения (по часовой стрелке), соответствующую требуемой глубине акватории. При этом происходит перемещение воды в канале 5 в направлении «снизу вверх». При включении привода (не показан) установленных на кронштейнах 14 гребных винтов 15 и 16 аппарат получает импульс движения, например, «вперед». При выключении одного из гребных винтов аппарат начинает вращаться по/против часовой стрелки в горизонтальной плоскости. Таким образом, движитель, расположенный в канале, обеспечивает подводному аппарату перемещение по вертикали, а работа гребных винтов - по горизонтали. Возможность изменения частоты вращения движителя, гребных винтов обеспечивает аппарату маневренность. Стабильность движения аппарата поддерживают с помощью руля 8. Наблюдения за перемещением аппарата в акватории осуществляются через окна 7 рубки управления. При работе аппарата в условиях неустойчивых или разнонаправленных подводных течений включают привод 17 ротора 18, состоящего из втулки a, тонкостенного держателя b и массивного обода с. Вращение установленного на подшипник d ротора образует «гироскопический эффект», способствующий удержанию аппарата в горизонтальном положении при воздействии на него внешних сил. При необходимости временного закрепления подводного аппарата на дне акватории используют выдвигающиеся из желобов 11 элементы 10.
Изобретение позволяет расширить ассортимент подводных аппаратов для эксплуатации на небольших глубинах.
Источники информации
1. US 1281414 А, 1918.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО | 2013 |
|
RU2535368C1 |
| ПОДВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2320515C1 |
| КАТАМАРАН | 2008 |
|
RU2381945C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |
| БЫСТРОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2360823C2 |
| БЫСТРОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ | 2009 |
|
RU2390461C1 |
| Подводный аппарат планирующего типа | 2020 |
|
RU2747106C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2747522C1 |
| БЫСТРОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2349488C2 |
| БЫСТРОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2412854C1 |
Изобретение относится к судостроению и касается создания подводных аппаратов. Подводный аппарат содержит полый корпус в форме двояковыпуклой линзы с гребными винтами, рубкой управления, рулем, окнами, люком, элементами крепления к дну акватории и сквозным каналом. В сквозном канале расположен движитель в виде винта Архимеда с возможностью реверсивного вращения и обеспечения движения подводного аппарата по вертикали. Сквозной канал выполняет функцию оси вращения, по крайней мере, одного ротора. Гребные винты установлены напротив друг друга по периметру корпуса неподвижно на кронштейнах с возможностью изменения частоты их вращения. Изобретение позволяет расширить диапазон эксплуатации подводных аппаратов на небольших глубинах. 4 ил.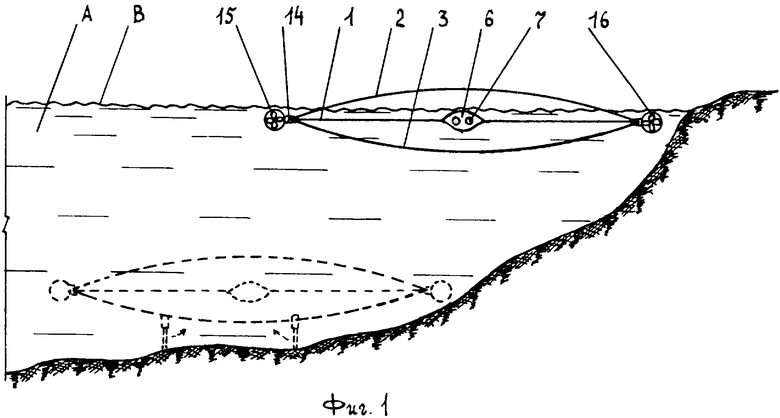
Подводный аппарат, содержащий полый корпус в форме двояковыпуклой линзы с гребными винтами, рубкой управления, рулем, окнами, люком, элементами крепления к дну акватории и сквозным каналом, в котором расположен движитель в виде винта Архимеда с возможностью реверсивного вращения и обеспечения движения подводного аппарата по вертикали, отличающийся тем, что сквозной канал выполняет функцию оси вращения, по крайней мере, одного ротора, а гребные винты установлены напротив друг друга по периметру корпуса неподвижно на кронштейнах с возможностью изменения частоты их вращения.
| Сборная насадная цилиндрическая фреза и способ ее установки | 1985 |
|
SU1281414A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФИЦИЕНТА БЕГУЩЕЙ ВОЛНЫ В ФИДЕРЕ | 1940 |
|
SU60476A1 |
| Фронтовая топочная плита | 1925 |
|
SU2796A1 |
| Гнездовая сеялка | 1926 |
|
SU23001A1 |

