Предпосылки создания изобретения
1. Область техники
Настоящее изобретение относится к подвижному роботу, в частности к подвижному роботу и к способу измерения пройденного им расстояния, посредством которого может быть осуществлено измерение пройденного расстояния с высокой точностью путем вычисления направления и величины перемещения подвижного робота посредством датчика изображения.
2. Уровень техники
Обычно, за счет использования ультразвуковых волн, генерация которых осуществлена множеством ультразвуковых датчиков, прикрепленных к подвижному роботу, подвижный робот может определять расстояние или направление посредством отраженных ультразвуковых волн.
Типичным примером подвижного робота может служить робот-пылесос. Робот-пылесос обеспечивает уборку пространства, очищаемого автоматически путем всасывания загрязнений, например пыли и т.п., с нижней поверхности при автоматическом перемещении по этому пространству, при этом пользователь не осуществляет управление им. В более подробном изложении робот-пылесос оценивает расстояние до препятствия, например до предмета мебели, до офисного оборудования, до стены и т.д., находящегося в пределах очищаемого пространства, посредством множества ультразвуковых датчиков, определяющих расстояние и направление, и осуществляет уборку очищаемого пространства путем автоматического переключения направления движения, выполняемого посредством выборочного приведения в действие двигателя левого колеса и двигателя правого колеса.
На Фиг.1 на виде в продольном разрезе показан обычный робот-пылесос.
Как показано на Фиг.1, обычный робот-пылесос содержит вентиляторный электродвигатель 2, создающий силу всасывания, направленную к основному корпусу 1 пылесоса; и съемный контейнер 4 с фильтром, установленный с задней стороны вентиляторного электродвигателя 2, который обеспечивает сбор пыли или грязи, всасываемой вентиляторным электродвигателем 2. Позади контейнера 4 с фильтром установлен всасывающий патрубок 5, служащий для всасывания пыли или грязи, а в нижней части всасывающего патрубка 5 установлена всасывающая головка 8, служащая для щеточной очистки нижней поверхности 6 от пыли или грязи.
Кроме того, под вентиляторным электродвигателем 2 установлены два подвижных колеса 9, способные совершать вращение вперед/назад, а позади всасывающей головки 8 установлено вспомогательное колесо 10, служащее в качестве опоры для задней части основного корпуса 1 пылесоса. В задней части основного корпуса 1 пылесоса установлена зарядная клеммная колодка 12, снабженная зарядной клеммой 11, а клеммная колодка электропитания 14, установленная на стене 13 внутреннего помещения, снабжена соединительной клеммой 15, обеспечивающей соединение с зарядной клеммной колодкой 12. Следовательно, при соединении зарядной клеммы 11 с соединительной клеммой 15 происходит зарядка заряжаемого аккумулятора 16, расположенного в основном корпусе 1 пылесоса.
Кроме того, в центре передней части основного корпуса 1 пылесоса установлен ультразвуковой датчик 17, служащий для передачи/приема ультразвуковых волн, а слева/справа от ультразвукового датчика 17 установлено множество ультразвуковых датчиков 18, расположенных на одинаковом расстоянии друг от друга, которые обеспечивают обнаружение препятствий или измерение расстояния до цели путем передачи ультразвуковых волн и их приема. В нижней части клеммной колодки 14 электропитания установлен источник 19 света, вызывающий приближение зарядной клеммной колодки 12 к клеммной колодке 14 электропитания путем генерации светового сигнала, а в нижней части зарядной клеммной колодки 12 установлено светочувствительное устройство 20, осуществляющее прием светового сигнала, поступающего из источника 19 света.
Номером позиции 21 обозначено средство управления, служащее для управления различными режимами работы пылесоса, а номером позиции 22 обозначен выпускной патрубок.
Ниже приведено описание операций по уборке, выполняемых обычным роботом-пылесосом.
Сначала при нажатии пользователем кнопки включения мощность заряжаемого аккумулятора 16 подают на вентиляторный электродвигатель 2, приводя в действие вентиляторный электродвигатель 2, и вентиляторный электродвигатель 2 создает силу всасывания в контейнере 4 с фильтром.
После этого за счет силы всасывания происходит всасывание пыли или грязи, находящейся на нижней поверхности 6, во всасывающую головку 8. Всасываемая пыль или грязь, поступающая через всасывающий патрубок 5, накапливается в фильтре 3. Кроме того, средство 21 управления посредством управляющего сигнала осуществляет управление подвижными колесами 9, и, следовательно, основной корпус 1 пылесоса при его перемещении выполняет уборку в требуемом пространстве.
Между тем при выполнении операции автоматической уборки в случае понижения уровня напряжения заряжаемого аккумулятора 16 до величины, более низкой, чем некоторый заданный уровень, средство 21 управления останавливает выполнение операции уборки. При этом средство 21 управления запоминает текущее местоположение пылесоса во внутренней памяти и осуществляет генерацию управляющего сигнала, обеспечивающего возвращение пылесоса в исходное положение согласно заранее заданной команде возврата, хранящейся в запоминающем устройстве.
Соответственно основной корпус 1 пылесоса перемещается к клеммной колодке 14 электропитания согласно управляющему сигналу средства 21 управления. После того, как основной корпус 1 пылесоса приблизится к клеммной колодке 14 электропитания, светочувствительное устройство 20, установленное в нижней части зарядной клеммной колодки 12, производит прием светового сигнала, генерация которого осуществлена источником 19 света, которым снабжена клеммная колодка 14 электропитания. Средство 21 управления функционирует таким образом, что осуществляет управление подвижным колесом 9 посредством светового сигнала, принятого светочувствительным устройством 20, и соответственно зарядная клеммная колодка 12 доходит до клеммной колодки 14 электропитания.
Затем зарядная клемма 11 зарядной клеммной колодки 12 входит в контакт с контактной клеммой 15 клеммной колодки 14 электропитания, и соответственно происходит зарядка заряжаемого аккумулятора основного корпуса 1 пылесоса электроэнергией, подаваемой через клеммную колодку 14 электропитания.
Между тем робот-пылесос при его перемещении выполняет операцию по уборке согласно запомненной в нем картографической информации, при этом операцию по уборке, первоначально выполненную по команде пользователя, выполняют многократно до тех пор, пока не будет изменено расположение предметов на очищаемом пространстве.
Однако для управления перемещением и т.д. робота-пылесоса при изменении расположения предметов на очищаемом пространстве и при изменении местоположения препятствия необходимо осуществлять изменение карты таким образом, чтобы она соответствовала измененному расположению предметов.
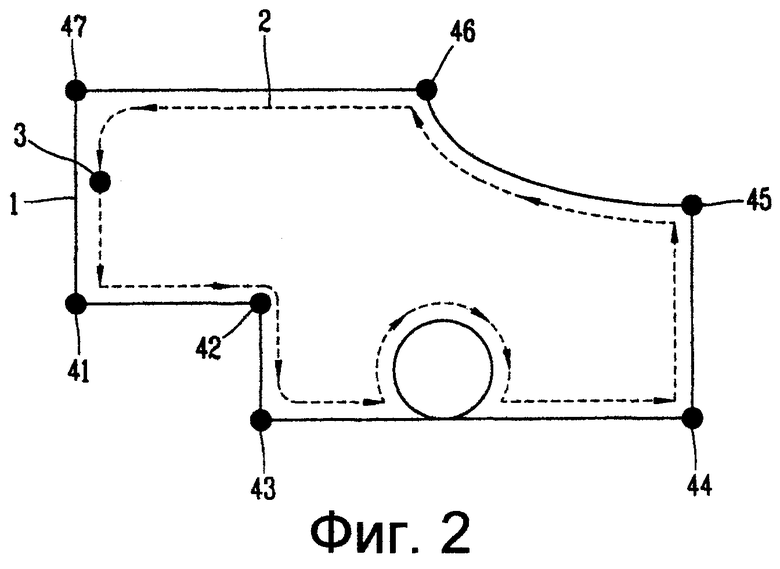
На Фиг.2 изображен пример картографического отображения очищаемого пространства в роботе-пылесосе с использованием маяков из известного уровня техники.
Как показано на Фиг.2, во внутреннем пространстве, в котором имеются препятствия, робот-пылесос начинает работу с исходной точки и перемещается, обходя препятствия за счет использования датчиков, и, следовательно, осуществляет генерацию зарегистрированной траектории перемещения. В данном варианте робот-пылесос при перемещении по внутреннему пространству осуществляет сбор дополнительной информации о внутреннем пространстве, принимая сигналы, поступающие из маяков 41˜47, установленных в определенных местах. Следовательно, робот-пылесос осуществляет картографическое отображение пространства на основании зарегистрированной траектории перемещения и сигналов, полученных из маяков.
Между тем для выполнения операции картографического отображения необходимо измерить расстояние, пройденное роботом-пылесосом. Следовательно, робот-пылесос измеряет пройденное им расстояние с использованием датчика положения, посредством которого осуществляют измерение угла поворота двигателя, или дополнительного колеса, расположенного отдельно от подвижного колеса. В более подробном изложении робот-пылесос вычисляет количество оборотов подвижного колеса посредством датчика положения или колеса, а для получения пройденного им расстояния длину окружности подвижного колеса умножают на количество оборотов.
Однако в случае пробуксовки подвижного колеса или иного колеса, несмотря на то, что робот-пылесос не перемещается, вычисления выполняют таким же самым образом, как и при перемещении робота-пылесоса, что, следовательно, может приводить к снижению точности вычисления пройденного им расстояния. Кроме того, при использовании в роботе-пылесосе одометра механического типа происходит непрерывное накопление погрешности, обусловленной вращением колеса, даже в случае отсутствия пробуксовки подвижного колеса или иного колеса, что соответственно затрудняет точное вычисление расстояния, пройденного роботом-пылесосом. Помимо этого на известном уровне техники при измерении пройденного расстояния с использованием величины перемещения, соответствующего механической конструкции, может возникать погрешность, обусловленная эксплуатационными проблемами, ударами, наличием пыли и влажностью.
Сущность изобретения
Для решения вышеуказанной проблемы предложено настоящее изобретение, в основу которого положена задача создания подвижного робота и способа измерения пройденного им расстояния, посредством которого вычисление пройденного им расстояния может быть осуществлено с высокой точностью путем измерения направления и величины перемещения подвижного робота посредством датчика изображения.
Для решения вышеуказанной задачи предложен подвижный робот, в котором используют датчик изображения, содержащий: устройство регистрации изображений, служащее для фотосъемки нижней поверхности через определенные промежутки времени в соответствии с перемещением подвижного робота и для регистрации изображений; измеритель смещения, служащий для измерения смещения относительно зарегистрированного изображения; и микрокомпьютер, служащий для вывода реально пройденного им расстояния, полученного путем вычисления направления и величины перемещения подвижного робота, исходя из измеренного значения смещения.
Кроме того, предложен способ измерения расстояния, пройденного подвижным роботом, с использованием датчика изображения, содержащий следующие операции: осуществляют фотосъемку нижней поверхности через определенные промежутки времени в соответствии с перемещением подвижного робота и регистрацию изображения; измеряют смещение между зарегистрированными изображениями и осуществляют вывод реально пройденного расстояния, полученного путем вычисления направления и величины перемещения вышеупомянутого подвижного робота, исходя из измеренного значения смещения.
Краткое описание чертежей
На сопроводительных чертежах, которые включены в состав описания для обеспечения лучшего понимания изобретения и составляют неотъемлемую часть этого описания, изображены варианты осуществления изобретения, и эти чертежи совместно с описанием служат для объяснения принципов изобретения.
На чертежах изображено следующее:
на Фиг.1 на виде в продольном разрезе показан обычный робот-пылесос;
на Фиг.2 изображен пример картографического отображения очищаемого пространства в роботе-пылесосе с использованием маяков из известного уровня техники;
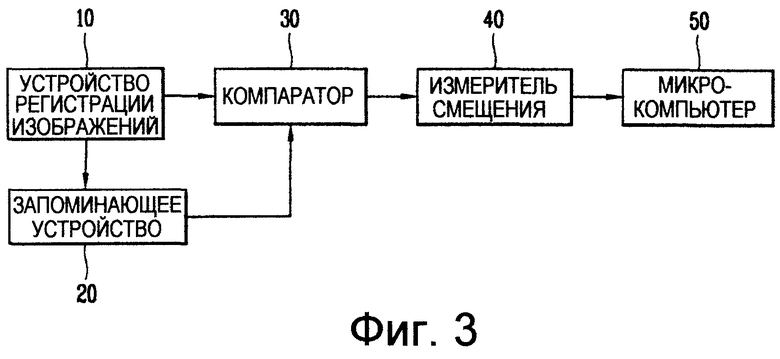
на Фиг.3 изображена блок-схема, на которой схематично показана конструкция подвижного робота, в котором используют датчик изображения, согласно настоящему изобретению;
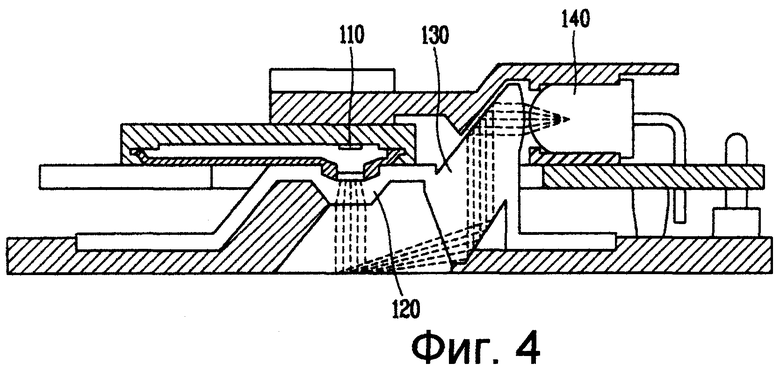
на Фиг.4 показан пример устройства регистрации изображений согласно настоящему изобретению; и
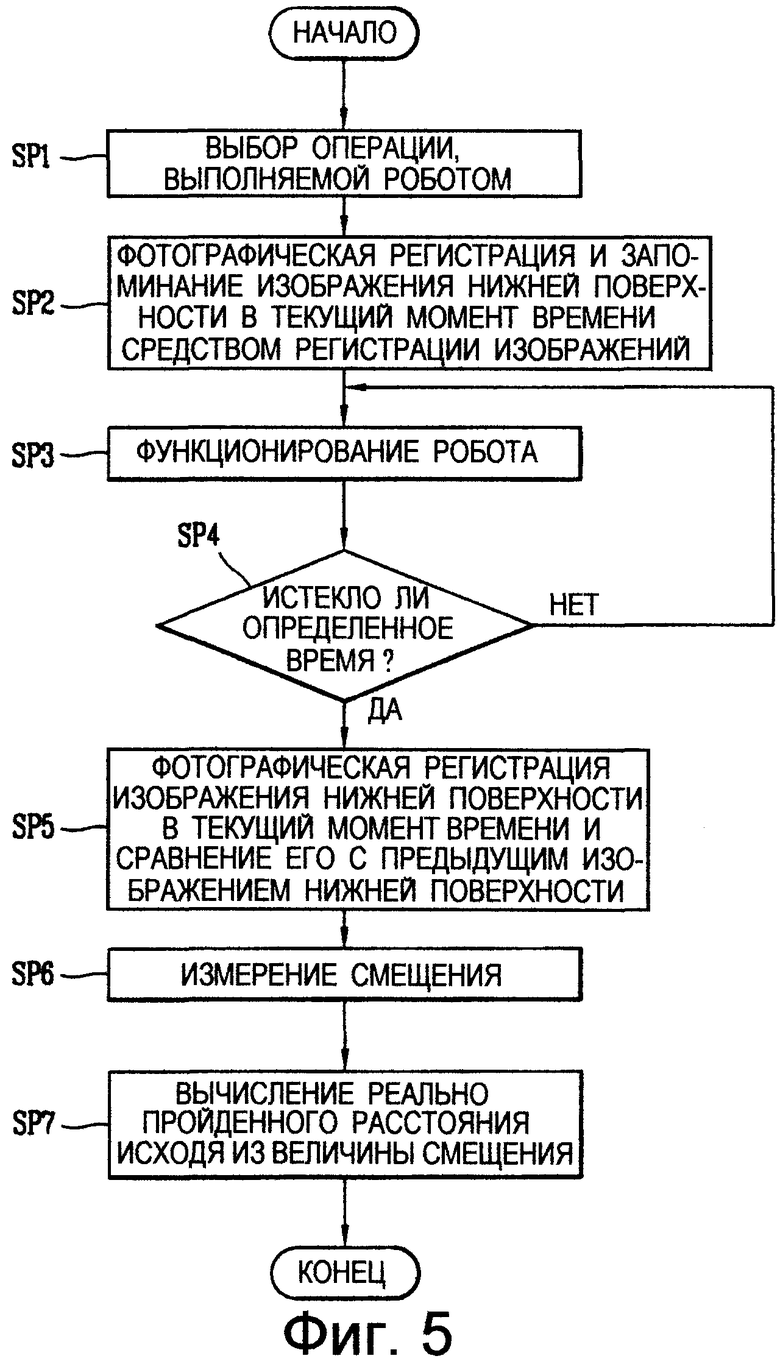
на Фиг.5 изображена схема последовательности операций, на которой показан способ измерения расстояния, пройденного роботом-пылесосом, с использованием датчика изображения согласно настоящему изобретению.
Подробное описание предпочтительного варианта
осуществления изобретения
На фиг.3 изображена блок-схема, на которой схематично показана конструкция подвижного робота, в котором используют датчик изображения, согласно настоящему изобретению;
На Фиг.4 показан пример устройства регистрации изображений согласно настоящему изобретению.
Как показано на Фиг.3 и Фиг.4, подвижный робот согласно настоящему изобретению содержит устройство 10 регистрации изображений, осуществляющее фотосъемку нижней поверхности через равные промежутки времени в соответствии с перемещением подвижного робота и регистрацию изображений; запоминающее устройство 20, служащее для запоминания изображений, выведенных из устройства 10 регистрации изображений; компаратор 30, служащий для сравнения изображения, выведенного из устройства 10 регистрации изображений, с предыдущим изображением, запомненным в запоминающем устройстве 20; измеритель 40 смещения, служащий для измерения смещения относительно зарегистрированного изображения на основании сигнала сравнения, выведенного из компаратора 30; и микрокомпьютер 50, служащий для вычисления направления и величины перемещения подвижного робота, исходя из величины смещения, выведенной из измерителя 40 смещения, и для вывода пройденного расстояния.
В этом варианте, показанном на Фиг.1, устройство 10 регистрации изображений установлено между щеткой 7 и подвижным колесом 9 и содержит светодиод 140, излучающий свет, световод 130, направляющий излученный свет, и датчик 110 изображения, воспринимающий изменение интенсивности света, отраженного от нижней поверхности и прошедшего через оптическую линзу 120, и регистрирующий изображение нижней поверхности.
Ниже приведено описание функционирования подвижного робота, в котором используют датчик изображения, согласно настоящему изобретению.
Сначала, когда светодиод 140 излучает свет, этим светом направленно облучают нижнюю поверхность через световод 130, созданный в корпусе подвижного робота. В этом варианте излученный свет отражается от нижней поверхности в нескольких направлениях, а оптическая линза 120 осуществляет фокусировку отраженного света. Следовательно, датчик 110 изображения воспринимает изменение интенсивности света, отраженного от нижней поверхности, и регистрирует изображение нижней поверхности. Согласно этому измерение смещения может быть осуществлено путем сравнения зарегистрированного изображения с предыдущим изображением, запомненным в запоминающем устройстве.
После этого микрокомпьютер 50 вычисляет направление и величину перемещения подвижного робота по измеренному значению смещения и осуществляет вывод реально пройденного расстояния.
На Фиг.5 изображена схема последовательности операций, на которой показан способ измерения расстояния, пройденного роботом-пылесосом, с использованием датчика изображения согласно настоящему изобретению.
Как показано на Фиг.5, в способе измерения расстояния, пройденного роботом-пылесосом, с использованием датчика изображения согласно настоящему изобретению, в том случае, когда пользователь осуществляет выбор команды приведения в действие для приведения подвижного робота в действие, устройство 10 регистрации изображений регистрирует фотографическое изображение нижней поверхности, соответствующее текущему моменту времени, и осуществляет запоминание зарегистрированного изображения в запоминающем устройстве 20, что показано на чертеже как операции SP1˜SP3. При этом фотосъемку изображения нижней поверхности выполняют многократно через определенные промежутки времени.
По истечении определенного промежутка времени компаратор 30 сравнивает текущее изображение с предыдущим изображением, запомненным в запоминающем устройстве, что показано на чертеже как операции SP4 и SP5.
В том случае, если в результате операции сравнения происходит изменение изображения между текущим изображением и предыдущим изображением, измеритель 40 смещения измеряет смещение, на которое переместилась определенная контрольная точка на изображении, что показано на чертеже как операция SP6. В более подробном изложении, в том случае, когда в результате операции сравнения получено, что зарегистрированные изображения являются одинаковыми, cчитают, что подвижный робот не перемещается, а в случае наличия изменений в зарегистрированных изображениях cчитают, что подвижный робот перемещается.
Затем микрокомпьютер 50 вычисляет направление и перемещение подвижного робота, исходя из измеренного значения смещения, и осуществляет вывод реально пройденного расстояния, что показано на чертеже как операция SP7.
Ниже приведено более подробное описание способа измерения пройденного расстояния согласно настоящему изобретению.
Устройство 10 регистрации изображений регистрирует изображение нижней поверхности с 64 градациями по яркости и с частотой 1500 кадров в секунду. Следовательно, измерение пройденного расстояния может быть осуществлено путем сравнения/вычисления траектории перемещения в соответствии с направлением и величиной перемещения элементов изображений. В более подробном изложении, в том случае, когда при сравнении изображений каждого кадра они являются одинаковыми, считают, что подвижный робот является неподвижным, а в том случае, когда изображение изменяется, пройденное расстояние может быть получено путем деления расстояния, на которое произошло перемещение элемента изображения, на определенное время. Например, расстояние, пройденное подвижным роботом, может быть получено путем деления расстояния, на которое произошло перемещение элемента изображения, на 1/1500 секунды.
Между тем, поскольку каждый элемент изображения воспринимает свет, отраженный от нижней поверхности, в соответствии с материалом, из которого выполнена нижняя поверхность, и отличается яркостью черно-белого изображения, наличие перемещения не может быть пропущено. Например, несмотря на то, что при перемещении яркость отличается на 1-2 градации вследствие того, что разрешение составляет 18*18 элементов изображения, легко принять решение о наличии перемещения, и, следовательно, может быть осуществлено точное и безошибочное определение расстояния, реально пройденного подвижным роботом.
Как описано выше, в настоящем изобретении за счет измерения пройденного расстояния посредством датчика изображения, которое не зависит от количества оборотов подвижного колеса, измерение пройденного расстояния может быть осуществлено с высокой точностью даже в случае пробуксовки подвижного колеса.
Кроме того, в отличие от обычных устройств из известного уровня техники, в которых для измерения пройденного расстояния используют датчики положения, установленные на левых/правых подвижных колесах, в настоящем изобретении можно осуществлять измерение расстояния, пройденного подвижным роботом, с высокой точностью посредством только одного датчика изображения, установленного в центре подвижного робота, и, следовательно, это позволяет упростить механическую конструкцию и облегчить техническое обслуживание и ремонт.
Поскольку настоящее изобретение может быть осуществлено в нескольких вариантах, не выходя за пределы его сущности или его существенных признаков, то также следует понимать, что вышеописанные варианты осуществления изобретения не ограничены какими-либо несущественными подробностями, изложенными в приведенном выше описании, за исключением тех случаев, когда это оговорено особо, а должны иметь расширенное толкование в пределах сущности изобретения и объема патентных притязаний, определяемого приложенной формулой изобретения, и, следовательно, подразумевают, что все изменения и модификации, подпадающие под объем патентных притязаний или эквивалентные объему патентных притязаний, являются охваченными приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ ДЕТЕКТОР ТЕЛА | 2005 |
|
RU2318652C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ (ВАРИАНТЫ) | 2007 |
|
RU2357644C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2719222C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
Изобретение относится к подвижному роботу. Робот содержит датчик изображения, устройство регистрации изображений, выполненное с возможностью фотосъемки нижней поверхности через определенные промежутки времени в соответствии с перемещением подвижного робота и для регистрации изображений, запоминающее устройство для запоминания изображений, выведенных из устройства регистрации изображений, компаратор для сравнения изображения, выведенного из устройства регистрации изображений, с предыдущим изображением, запомненным в запоминающем устройстве, измеритель смещения, выполненный с возможностью измерения смещения относительно зарегистрированного изображения, и микрокомпьютер, выполненный с возможностью вывода реально пройденного расстояния, полученного путем вычисления направления и величины перемещения вышеупомянутого подвижного робота, исходя из измеренного значения смещения. Осуществляя способ измерения расстояния, пройденного подвижным роботом, при выполнении измерения смещения в случае, когда каждое из зарегистрированных изображений является одинаковым по сравнению с другими, считают, что отсутствует перемещение подвижного робота, а в случае, когда каждое из зарегистрированных изображений отличается от других при их сравнении, считают, что подвижный робот перемещается. Изобретение позволит с высокой точностью определять расстояние, пройденное роботом, упростить конструкцию, облегчить техническое обслуживание и ремонт. 2 н. и 10 з.п. ф-лы, 5 ил.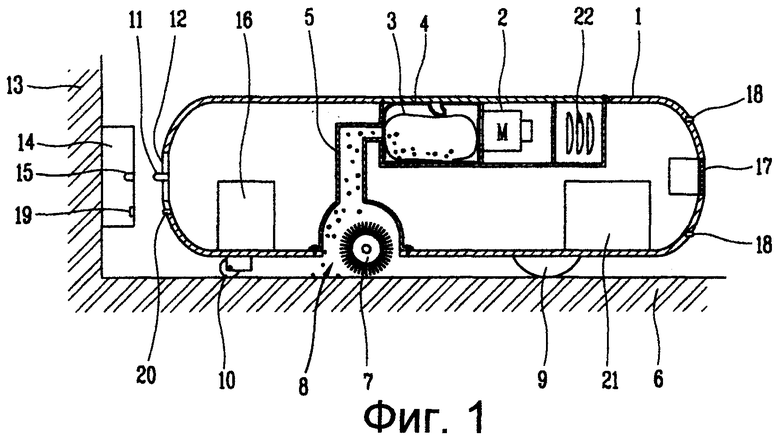
| US 6317652 B1, 13.11 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| СПОСОБ ПРОИЗВОДСТВА ХОЛОДА | 2008 |
|
RU2376535C2 |
| US 5040116, 13.08 | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |
| RU 2001118749 А, 27.03.2003 | |||
| RU 92013234 A, 27.08.1996. | |||

