ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет данной заявки заявляется по корейской заявке на изобретение №10-2005-0082407, которая подана в корейское Ведомство по Интеллектуальной Собственности 5 сентября 2005 года и описание которой включено в данный документ посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники
Данное изобретение относится к мобильным роботам и, в частности, к мобильной робототехнической системе с несколькими сменными рабочими модулями и к способу управления этой системой.
Описание уровня техники
Как правило, под мобильным роботом понимают робот, который работает автономно, выполняя поставленное рабочее задание, например уборку. Среди подобных мобильных роботов роботы-уборщики, которые могут выполнять функцию пылесоса, с недавних пор образуют новый рынок продаж, значение которого возрастает. Для повышения процента рыночной доли на рынок поставляются различные роботы-уборщики, которые, кроме основной функции пылесоса, могут выполнять и другие функции. В настоящее время роботы-уборщики могут выполнять функции очистки щеткой, очистки паром, очистки воздуха, увлажнения и т.д.
Однако поскольку имеющиеся в настоящее время мобильные роботы-уборщики могут выполнять только одну или две функции, то у пользователей, которым требуется многофункциональный робот-уборщик, возникает проблема с имеющимися в настоящее время мобильными роботами-уборщиками.
Если для решения указанной проблемы один робот-уборщик объединяет в себе перечисленные выше различные функции, то возникает необходимость увеличения размера и веса робота. По существу, мощность приводного двигателя робота-уборщика также должна возрасти, но проблема более крупных систем состоит в том, что стоимость производства такого робота-уборщика будет намного выше.
Кроме того, в таких крупных многоцелевых мобильных роботах возникает дополнительная проблема, состоящая в том, что поскольку пользователь приобретает многофункциональный робот-уборщик для выполнения различных функций, то цена будет обременительна для пользователя, если ему необходима только одна или некоторые из функций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, данное изобретение создано для решения указанных выше проблем известного уровня техники. Цель данного изобретения заключается в создании мобильной робототехнической системы с несколькими сменными рабочими модулями, для того чтобы без существенного увеличения стоимости производства система могла выполнять различные задания, и в создании способа управления этой системой.
Для достижения указанной цели предложена мобильная робототехническая система с несколькими сменными рабочими модулями, содержащая несколько рабочих модулей, которые выполняют разные рабочие задания; модульную станцию, предназначенную для соединения нескольких рабочих модулей; и мобильный робот, который в соответствии с поставленным заданием выбирает один из нескольких рабочих модулей, находящихся в модульной станции, соединяется с ним и предназначен для работы в автономном режиме.
Здесь мобильный робот может содержать корпус; привод, находящийся в корпусе; элемент для стыковки модулей, находящийся на одной стороне корпуса и предназначенный для соединения с одним из нескольких рабочих модулей; электрический соединительный элемент, установленный на одной стороне корпуса рядом с элементом для стыковки модулей и предназначенный для подачи электрической энергии в рабочий модуль, подсоединенный к мобильному роботу; сигнальный соединительный элемент, установленный рядом с электрическим соединительным элементом и предназначенный для обмена сигналами с рабочим модулем, подсоединенным к мобильному роботу; и контроллер робота, находящийся в корпусе и предназначенный для управления приводом таким образом, что элемент для стыковки модулей, электрический соединительный элемент и сигнальный соединительный элемент соединяются с указанным одним модулем, выбранным из нескольких рабочих модулей.
В то же время предпочтительней, чтобы контроллер робота запоминал несколько маршрутов движения, которые соответствуют нескольким рабочим модулям, так что контроллер робота из нескольких маршрутов движения выбирает один маршрут движения, который соответствует рабочему модулю, подсоединенному к элементу для стыковки модулей, и управляет мобильным роботом так, что он действует на выбранном маршруте движения и выполняет рабочее задание.
Кроме того, каждый из нескольких рабочих модулей может содержать корпус модуля; рабочее устройство, находящееся в корпусе модуля, выполняющего поставленное рабочее задание; ответный соединительный элемент, расположенный на одной стороне корпуса модуля и предназначенный для подсоединения к соответствующему элементу для стыковки модулей модульной станции; ответный стыковочный элемент, расположенный на другой стороне корпуса модуля так, что соединяется с элементом для стыковки модулей мобильного робота; ответный сигнальный соединительный элемент и ответный электрический соединительный элемент, находящиеся на еще одной стороне корпуса модуля и соединенные соответственно с сигнальным соединительным элементом и электрическим соединительным элементом мобильного робота.
В то же время рабочие устройства нескольких рабочих модулей могут содержать элемент с функцией пылесоса, элемент с функцией очистки щеткой, элемент с функцией стерилизации и элемент с функцией очистки воздуха соответственно. Кроме того, предпочтительней, чтобы элемент для стыковки модулей состоял из электромагнита.
Согласно другому аспекту данного изобретения предлагается способ управления мобильной робототехнической системой, включающий этапы: а) выбора среди нескольких рабочих модулей, размещенных в модульной станции, того рабочего модуля, который предназначен для использования при выполнении мобильным роботом поставленного рабочего задания; b) определения, является ли рабочий модуль, соединенный с мобильным роботом, тем рабочим модулем, который предназначен для использования при выполнении поставленных рабочих заданий при подсоединении такого рабочего модуля к мобильному роботу; с) освобождения и подсоединения рабочего модуля, соединенного с мобильным роботом, к модульной станции, если рабочий модуль не является тем рабочим модулем, который предназначен для использования при выполнении поставленного рабочего задания; d) инициирования соединения в модульной станции мобильного робота с рабочим модулем, который предназначен для использования при выполнении поставленного рабочего задания; е) инициирования выполнения мобильным роботом поставленного задания с использованием рабочего модуля, соединенного с мобильным роботом.
Здесь этап с) может включать этапы подтверждения положения рабочего модуля, предназначенного для использования при выполнении мобильным роботом поставленного рабочего задания; инициирования перемещения мобильного робота и соединения его с рабочим модулем, предназначенным для использования при выполнении поставленного рабочего задания; инициирования передачи мобильным роботом сигнала завершения стыковки; и инициирования освобождения модульной станцией рабочего модуля, предназначенного для использования при получении сигнала завершения стыковки.
Кроме того, этап d) может включать этапы подтверждения положения в модульной станции, которое предназначено для освобождения и подсоединения к модульной станции рабочего модуля, который соединен с мобильным роботом; инициирования соединения мобильного робота с рабочим модулем, который соединен с мобильным роботом, в подтвержденное положение в модульной станции; и инициирования освобождения рабочего модуля мобильным роботом и последующего перемещения из модульной станции.
Согласно изобретению мобильная робототехническая система включает несколько сменных рабочих модулей и способ управления ими, вследствие чего мобильный робот предназначен для выполнения поставленного рабочего задания при работе только с одним из нескольких рабочих модулей, которые имеют разные функции. Следовательно, размер и вес мобильного робота не увеличиваются по сравнению с обычным мобильным роботом.
Кроме того, поскольку мобильный робот может выбирать из рабочих модулей, которые подсоединены к модульной станции и имеют разные функции, тот рабочий модуль, который способен выполнять требуемую функцию, то возможно выполнение различных рабочих заданий по желанию пользователя. Следовательно, различные рабочие задания можно выполнить, по существу, без увеличения стоимости изготовления мобильного робота.
Далее согласно изобретению мобильная робототехническая система включает несколько сменных рабочих модулей и такой способ управления системой, что возможно расширение функций мобильного робота за счет приобретения одного или нескольких рабочих модулей по желанию пользователя, поскольку рабочие модули и модульная станция разбиты на модули в соответствии с их функциями. То есть пользователь вначале может приобрести модульную станцию с зарядным узлом, элемент для подсоединения модулей и мобильный робот с модулем для уборки, а через некоторое время может приобрести модуль с функцией очистки щеткой и другой элемент для подсоединения модулей, расширяя, таким образом, модульную станцию так, что функции мобильного робота можно расширить от функции уборки до функции очистки щеткой. Поэтому издержки пользователя не являются значительными.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изложенные выше аспекты и признаки данного изобретения станут более очевидными из описания некоторых вариантов выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 представляет вид сверху, на котором изображен вариант выполнения мобильной робототехнической системы с несколькими сменными рабочими модулями, выполненный в соответствии с данным изобретением;
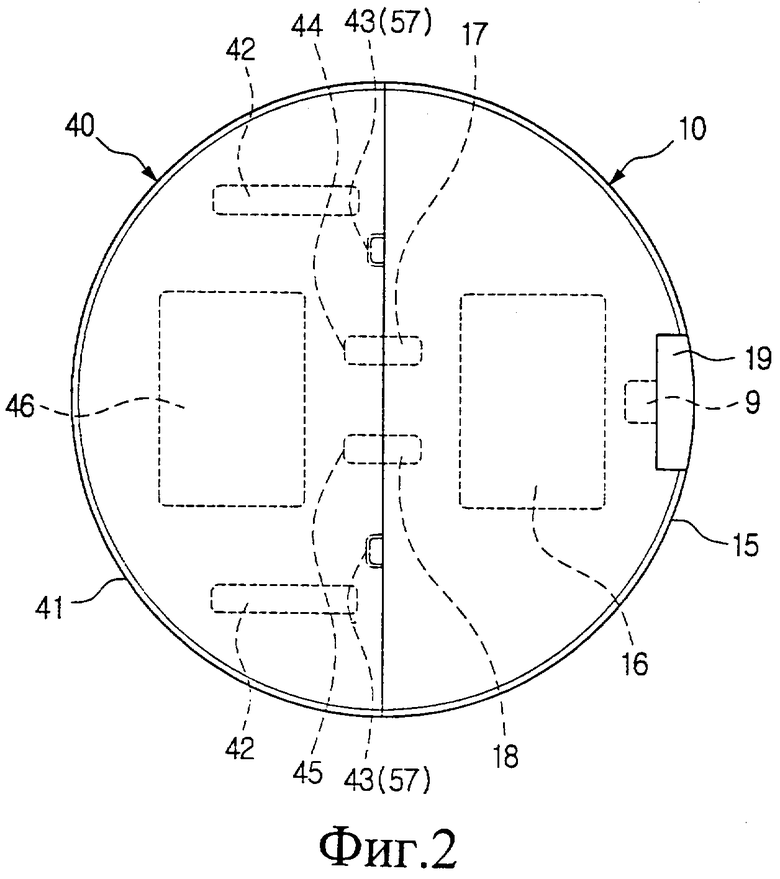
фиг.2 представляет вид сверху, на котором изображен мобильный робот, соединенный с рабочим модулем в мобильной робототехнической системе, показанной на фиг.1;
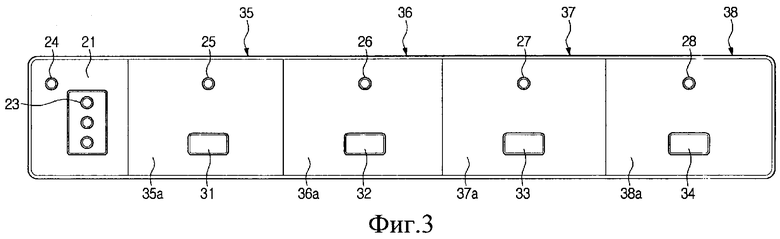
фиг.3 представляет вид спереди, на котором изображен вариант выполнения модульной станции мобильной робототехнической системы, показанной на фиг.1;
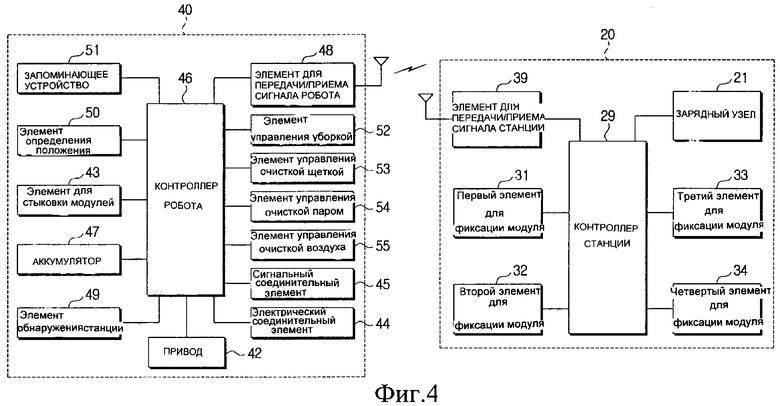
фиг.4 представляет функциональную структурную схему мобильной робототехнической системы, показанной на фиг.1;
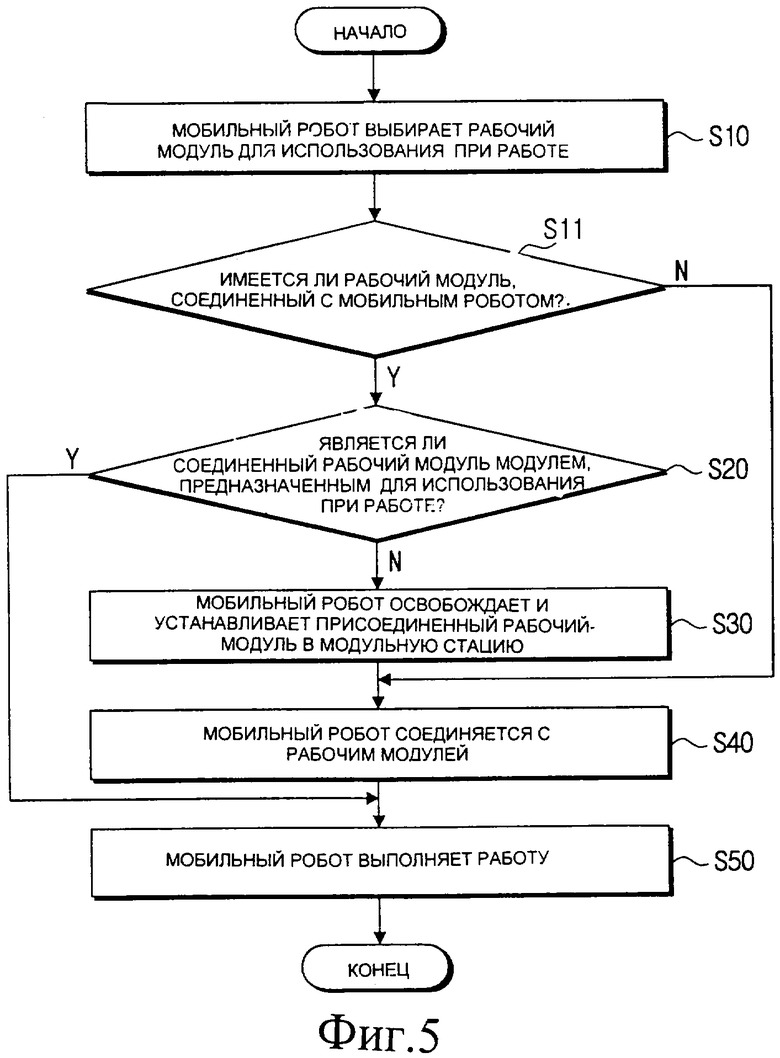
фиг.5 представляет блок-схему, изображающую способ управления мобильной робототехнической системой в соответствии с одним вариантом выполнения данного изобретения;
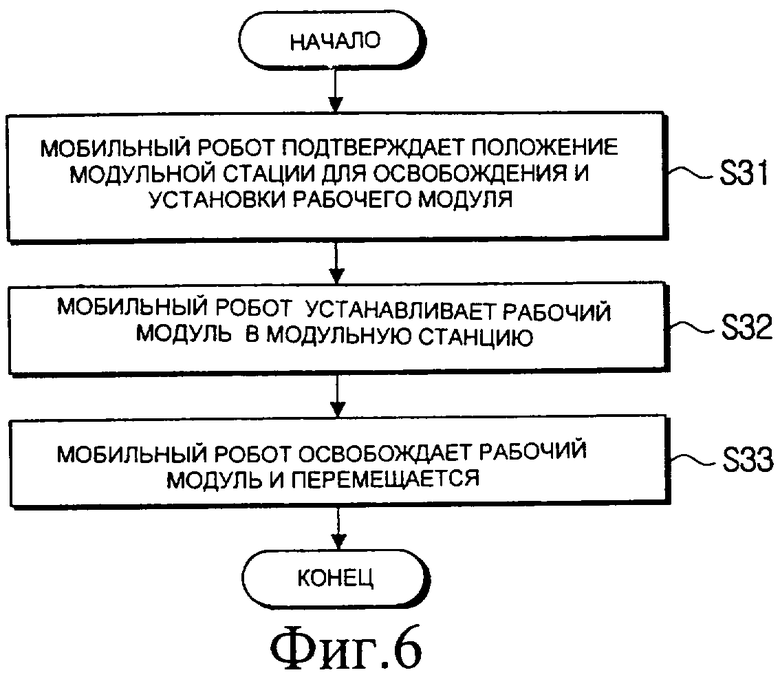
фиг.6 представляет блок-схему, изображающую этап освобождения и подсоединения рабочего модуля в способе управления, показанном на фиг.5; и
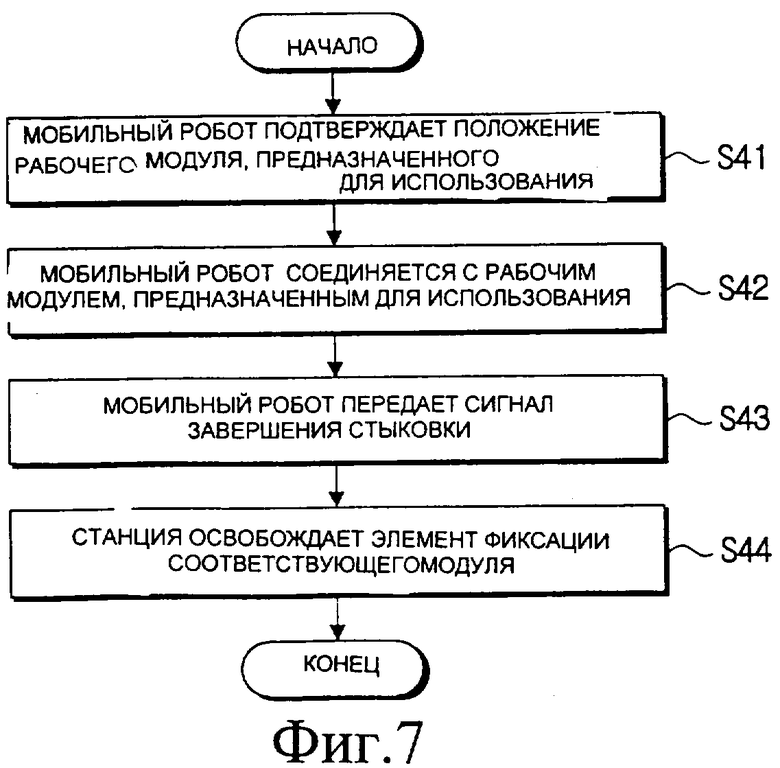
фиг.7 представляет блок-схему, изображающую этап подсоединения рабочего модуля в способе управления, показанном на фиг.5.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже подробно описаны предпочтительные варианты выполнения данного изобретения со ссылкой на прилагаемые чертежи. В частности, в качестве показательного примера мобильного робота ниже описан робот-уборщик с функцией очистки пылесосом, очевидно, что другие функции других рабочих модулей также являются частью изобретения.
Обратимся к фиг.1-4, на которых показана мобильная робототехническая система 1 с несколькими сменными рабочими модулями, выполненная согласно одному варианту выполнения данного изобретения и содержащая несколько рабочих модулей 10, модульную станцию 20 и мобильный робот 40.
Каждый рабочий модуль 10 имеет корпус 15, рабочее устройство 16, ответный элемент 19, ответный стыковочный элемент 57, ответный сигнальный соединительный элемент 18 и ответный электрический соединительный элемент 17.
Для выполнения поставленного рабочего задания в корпусе 15 модуля имеется рабочее устройство 16. Рабочее устройство 16 может быть реализовано различными средствами согласно функции, которую выполняет рабочий модуль 10. Например, рабочий модуль, способный выполнять функцию пылесоса (в дальнейшем упоминаемый как "модуль для уборки"), выполнен с пылесосом в рабочем устройстве. Пылесос содержит всасывающее окно, предназначенное для всасывания загрязнителей, причем, чтобы он мог выполнять вакуумную уборку, окно расположено в донной части корпуса 15 модуля; всасывающую часть, предназначенную для создания всасывающего усилия; и пылеулавливающую часть, предназначенную для отдельного улавливания втянутых загрязнителей. Кроме того, если рабочий модуль является модулем, способным производить очистку щеткой (в дальнейшем упоминается как "модуль для очистки щеткой"), то в рабочем устройстве 16 имеется элемент, производящий очистку щеткой. Более того, если рабочий модуль имеет функцию очистки паром (в дальнейшем упоминается как "модуль для очистки паром"), то имеется элемент для очистки паром, и если рабочий модуль имеет функцию стерилизации (в дальнейшем упоминается как "модуль для стерилизации"), то имеется элемент для стерилизации. Подробные описания устройств, предназначенных для осуществления упомянутых выше функций, не приводятся, поскольку их технологии хорошо известны.
Ответный элемент 19 находится на одной стороне корпуса 15 модуля и соединен с любым из элементов 31, 32, 33 и 34 для подсоединения модулей модульной станции 20. То есть ответный элемент 19 соединен с одним из элементов 31, 32, 33 и 34 для подсоединения модулей, находящихся на модульной станции 20, препятствуя перемещению рабочего модуля 10. Следовательно, если мобильный робот 40 состыкован с рабочим модулем 10, то рабочий модуль 10 неподвижен. Поскольку конструкции ответного соединительного элемента 19 рабочего модуля 10 и элементов 31, 32, 33 и 34 для подсоединения модулей модульной станции 20 можно осуществить, применяя различные хорошо известные приемы, включая использование электромагнита, то их подробные описания не приводятся.
Ответный стыковочный элемент 57 расположен на другой стороне корпуса 15 модуля и соединяется с элементом для стыковки модулей 43 мобильного робота 40. Если ответный стыковочный элемент 57 рабочего модуля 10 соединен с элементом для стыковки модулей 43 мобильного робота 40, то рабочий модуль 10 перемещается вместе с мобильным роботом 40, таким образом можно выполнить поставленное рабочее задание в соответствии с инструкцией контроллера 46 робота. Элемент для стыковки модулей 43 и ответный стыковочный элемент 57 можно сформировать используя электромагниты. В данном варианте выполнения ответный стыковочный элемент 57 выполнен в форме двух цилиндрических выступов из материала, который притягивается магнитом, например железа. Кроме того, элемент для стыковки модулей 43 мобильного робота 40 имеет форму, соответствующую ответному стыковочному элементу 57 рабочего модуля 10. То есть элемент для стыковки модулей 43 имеет форму двух цилиндрических выемок, в которые могут входить два указанных цилиндрических выступа ответного стыковочного элемента 57. Кроме того, элемент для стыковки модулей 43 состоит из электромагнита. Следовательно, если в состоянии, когда ответный стыковочный элемент 57 вставлен в элемент для стыковки модулей 43, подается электрическая энергия, то элемент для стыковки модулей 43 намагничивается, препятствуя отсоединению ответного стыковочного элемента 57 от элемента 43 для стыковки модулей. В то же время магнитная сила элемента 43 для стыковки модулей должна быть достаточно большой, чтобы препятствовать отсоединению рабочего модуля 10 от мобильного робота 40. Конечно, конфигурации элемента 43 для стыковки модулей и ответного стыковочного элемента 57 можно осуществить не используя электромагнит, а используя другие хорошо известные способы.
Ответный сигнальный соединительный элемент 18 расположен вблизи ответного стыковочного элемента 57 на той стороне корпуса 15 модуля, на которой расположен ответный стыковочный элемент 57, и соединяется с сигнальным соединительным элементом 45 мобильного робота 40. То есть если элемент для стыковки модулей 43 мобильного робота 40 соединен с ответным стыковочным элементом 57 рабочего модуля 10, то сигнальный соединительный элемент 45 мобильного робота 40 и ответный сигнальный соединительный элемент 18 рабочего модуля 10 соединяются друг с другом, вследствие чего контроллер 46 робота может управлять рабочим модулем 10.
Ответный электрический соединительный элемент 17 расположен параллельно ответному сигнальному соединительному элементу 18 по соседству с ответным стыковочным элементом 57 на той же стороне корпуса 15 модуля, где находится ответный стыковочный элемент 57, и соединяется с электрическим соединительным элементом 44 мобильного робота 40. То есть если элемент 43 для стыковки модулей мобильного робота 40 соединен с ответным стыковочным элементом 57 рабочего модуля 10, то электрический соединительный элемент 44 мобильного робота 40 и ответный электрический соединительный элемент 17 соединены друг с другом так, что в рабочий модуль 10 может подаваться электрическая энергия.
Предпочтительней, чтобы на/в донной стороне корпуса 15 модуля было по меньшей мере одно вспомогательное колесо 9, предназначенное для поддержания движения рабочего модуля 10. Количество вспомогательных колес 9 можно определить в зависимости от размера рабочего модуля 10.
Модульная станция 20 допускает замену рабочих модулей 10 (11, 12, 13 и 14) мобильным роботом 40 путем подсоединения описанных выше рабочих модулей 10 (11, 12, 13 и 14) в заданных положениях. Такая модульная станция 20 имеет основание 22, зарядный узел 21, несколько элементов 31, 32, 33 и 34 для подсоединения модулей, элемент 39, передающий/принимающий сигнал станции, и контроллер 29 станции.
Зарядный узел 21 соединен с источником энергии 8 общего пользования и применяется для зарядки аккумулятора 47 мобильного робота 40. Поэтому зарядный узел 21 имеет зарядный терминал 23, который должен быть соединен с аккумулятором 47. Кроме того, вблизи зарядного терминала 23 находится элемент 24 опознавания (см. фиг.3), предназначенный для установления положения зарядного узла 21. Обращаясь к элементу 24 опознавания зарядного узла 21, мобильный робот 40 может установить положение зарядного узла 21.
Несколько элементов 31, 32, 33 и 34 для подсоединения модулей расположены на передней стороне основания 22 таким образом, что они согласуются соответственно с несколькими предназначенными для использования рабочим модулями 10 (11, 12, 13 и 14). То есть каждый рабочий модуль 11, 12, 13 и 14 соединен соответственно с одним из элементов 31, 32, 33 и 34 для подсоединения модулей. Поэтому элементы 31, 32, 33 и 34 для подсоединения модулей имеют форму, соответствующую ответным соединительным элементам 19 рабочих модулей 11, 12, 13 и 14 соответственно. Кроме того, для распознавания элементов 31, 32, 33 и 34 для подсоединения модулей поблизости с ними выполнены соответственно элементы 25, 26, 27 и 28 опознавания (см. фиг.3). Обращаясь к элементам 25, 26, 27 и 28 опознавания, мобильный робот 40 может определить, на каком из элементов 31, 32, 33 и 34 для подсоединения модулей имеется определенный рабочий модуль. В модульной станции 20 данного варианта выполнения имеются четыре элемента 31, 32, 33 и 34 для подсоединения модулей. Обратимся к фиг.1, где представлены четыре элемента для подсоединения модулей, а именно первый, второй, третий и четвертый элементы 31, 32, 33 и 34 для подсоединения модулей, предназначенные для подсоединения модуля 11 для уборки, модуля 12 для очистки щеткой, модуля 13 для очистки воздуха и модуля для стерилизации, в указанном порядке от нижней стороны зарядного узла 21.
Форма элементов 25, 26, 27 и 28 опознавания, предназначенных для распознавания зарядного узла 21 и элементов 31, 32, 33 и 34 для подсоединения модулей, может быть различной в зависимости от формы элемента 49 обнаружения станции, расположенного в мобильном роботе 40. Например, если в качестве элемента 49 обнаружения станции используется видеокамера, то элементы 25, 26, 27 и 28 опознавания образованы знаками, которые можно различить с помощью видеокамеры. Если в качестве элемента 49 обнаружения станции используется ультразвуковой датчик, то каждый из элементов 25, 26, 27 и 28 опознавания образован элементом, передающим ультразвуковой волновой сигнал, который передает ультразвуковые волны определенной частоты.
Элемент 39 для передачи/приема сигнала станции принимает сигнал от элемента 48 для передачи/приема сигнала робота, расположенного в контроллере 46 робота, и передает сигнал к контроллеру 29 станции. Кроме того, элемент 39 для передачи/приема сигнала станции принимает и передает сигнал от контроллера 29 станции.
Согласно сигналам контроллера 46 робота, которые переданы с элемента 39 для передачи/приема сигнала станции, контроллер 29 станции управляет несколькими элементами 31, 32, 33 и 34 для подсоединения модулей и зарядным узлом 21.
Несмотря на то что, как описано выше, модульная станция 20 может быть сформирована путем размещения нескольких элементов 31, 32, 33 и 34 для подсоединения модулей на основании 22, модульную станцию 20 можно также сформировать путем сборки зарядного узла 21 с несколькими построенными из унифицированных единиц узлами 35, 36, 37 и 38 для подсоединения модулей, как показано на фиг.3. В этом случае каждый узел 35, 36, 37 и 38 для подсоединения модулей содержит один элемент 31, 32, 33 и 34 для подсоединения модулей, один элемент 25, 26, 27 и 28 опознавания и кожух 35а, 36а, 37а и 38а, поддерживающий их. Если соединительные узлы 35, 36, 37 и 38 построены из унифицированных единиц таким образом, то пользователь может выборочно приобрести и собрать один или несколько рабочих модулей 10 и один или несколько требуемых соответствующих узлов 35, 36, 37 и 38 для подсоединения модулей, что удобно для пользователя и приемлемо по цене.
В зависимости от работы, которую необходимо выполнить, мобильный робот 40 выбирает один из рабочих модулей 11, 12, 13 и 14 модульной станции 20 и соединяется с ним, а затем выполняет рабочее задание, работая автономно. Мобильный робот 40 содержит корпус 41, привод 42, элемент для стыковки модулей 43, электрический соединительный элемент 44, сигнальный соединительный элемент 45, контроллер 46 робота, аккумулятор 47, элемент 48 для передачи/приема сигнала робота, элемент 49 обнаружения станции и элемент 50 определения положения.
Привод 42 расположен в корпусе 41 и вызывает перемещение мобильного робота 40 под управлением контроллера 46 робота.
Элемент для стыковки модулей 43 расположен на одной стороне корпуса 41 и выполнен таким образом, что соединяется с одним из нескольких рабочих модулей 11, 12, 13 и 14 рабочего модуля 10. Элемент для стыковки модулей 43 имеет форму, соответствующую ответному стыковочному элементу 57 рабочего модуля 10, описанному выше. Кроме того, в данном варианте выполнения элемент для стыковки модулей 43 является электромагнитом и выполнен так, что сигналом от контроллера 46 робота можно подключить/отключить подачу электрической энергии от аккумулятора 47.
Электрический соединительный элемент 44 расположен вблизи элемента для стыковки модулей 43 на той же стороне корпуса 41, где установлен элемент 43 для стыковки модулей, и соединяется с ответным электрическим соединительным элементом 17 рабочего модуля 10 таким образом, что подает электрическую энергию к рабочему устройству 16 рабочего модуля 10. Электрический соединительный элемент 44 выполнен в виде разъема и при соединении элемента 43 для стыковки модулей с ответным стыковочным элементом 17 соединяется с ответным электрическим соединительным элементом 17.
Сигнальный соединительный элемент 45 расположен вблизи электрического соединительного элемента 44, расположенного на указанной одной стороне корпуса 41, и соединен с ответным сигнальным соединительным элементом 18 рабочего модуля 10, обмениваясь сигналами с рабочим устройством 16 рабочего модуля 10. Сигнальный соединительный элемент 45 образован разъемом и при соединении элемента 43 для стыковки модулей с ответным стыковочным элементом 57 соединяется с ответным сигнальным соединительным элементом 18.
Контроллер 46 робота расположен в корпусе 41 и управляет приводом 42, элементом 43 для стыковки модулей, электрическим соединительным элементом 44, сигнальным соединительным элементом 45, аккумулятором 47, элементом 48 для передачи/приема сигнала робота, элементом 49 обнаружения станции и элементом 50 определения положения.
Контроллер 46 робота, используя элемент 49 обнаружения станции, из нескольких элементов 31, 32, 33 и 34 для подсоединения модулей обнаруживает элемент для подсоединения модуля, к которому подсоединен определенный рабочий модуль 10. После этого контроллер 46 робота управляет приводом 42 таким образом, что элемент 43 для стыковки модулей входит в ответный стыковочный элемент 57 рабочего модуля 10, соединяя рабочий модуль 10 с мобильным роботом 40.
Кроме того, контроллер 46 робота определяет зарядную емкость аккумулятора 47, а затем подсоединяет аккумулятор 47 к зарядному терминалу 23, если это необходимо. В то же время контроллер 46 робота определяет положение зарядного терминала 23, используя элемент 49 обнаружения станции и элемент 24 опознавания модульной станции 20.
Контроллер 46 робота содержит элемент 52 управления уборкой, элемент 53 управления очисткой щеткой, элемент 54 управления очисткой паром и элемент 55 управления очисткой воздуха, так что для выполнения любого поставленного задания контроллер 46 робота может управлять рабочим модулем 10, соединенным с мобильным роботом 40. В то же время контроллер 46 робота имеет запоминающее устройство 51, в которое заложены несколько маршрутов движения, которые заданы предварительно для наиболее эффективного выполнения соответствующих рабочих заданий. Например, если к мобильному роботу 40 подсоединен рабочий модуль 11, который может выполнять уборку (в дальнейшем упоминается как "модуль для уборки"), то контроллер 46 робота управляет приводом 42 в соответствии с маршрутом движения для уборки, выбранным из нескольких маршрутов движения, заложенных в запоминающем устройстве 51. Затем мобильный робот 40 перемещается по маршруту, который является наиболее оптимизированным для уборки пылесосом, и при работе элемент 52 управления уборкой управляет работой пылесоса модуля для уборки таким образом, что может осуществляться уборка. То есть контроллер 46 робота запоминает несколько маршрутов движения, наиболее оптимизированных, соответственно, для нескольких рабочих модулей 11, 12, 13 и 14, и выбирает маршрут движения, соответствующий тому рабочему модулю из нескольких рабочих модулей 11, 12, 13 и 14, который соединен с элементом 43 для стыковки модулей, в результате чего контроллер инициирует работу мобильного робота 40 на выбранном маршруте движения при выполнении поставленного рабочего задания.
Аккумулятор 47 является источником энергии, предназначенным для подачи необходимой электроэнергии в элементы мобильного робота 40. Несмотря на то что в качестве источника энергии используется аккумулятор 47, вместо него можно также использовать топливный элемент или подобный элемент.
Элемент 48 для передачи/приема сигнала робота принимает сигнал с контроллера 46 робота и передает его во внешнее устройство, а также принимает сигнал, переданный с пульта дистанционного управления (не показан) или элемента 39 для передачи/приема сигнала станции, и передает его в контроллер 46 робота. Контроллер 46 робота управляет мобильным роботом 40 в соответствии с командой, полученной с пульта дистанционного управления для выполнения работы, указанной в команде. Кроме того, если элемент 43 для стыковки модулей состыкован с ответным стыковочным элементом 57, то контроллер 46 робота через элемент 48 для передачи/приема сигнала робота передает сигнал завершения стыковки в элемент 39 для передачи/приема сигнала станции.
Используя элементы 24, 25, 26 и 27 опознавания, имеющиеся на модульной станции 20, элемент 49 обнаружения станции определяет положения зарядного узла 21 и нескольких элементов 31, 32, 33 и 34 для подсоединения модулей модульной станции 20.
Элемент 50 определения положения определяет текущее положение мобильного робота 40, используя различные хорошо известные способы, например использование видеокамеры или пульта наблюдения.
Ниже со ссылкой на прилагаемые чертежи описана мобильная робототехническая система с выполненными согласно варианту выполнения данного изобретения сменными рабочими модулями, каждый из которых имеет указанные выше элементы. Фиг.1 изображает состояние, в котором с мобильным роботом 40 соединен модуль 13 для очистки воздуха.
Если мобильный робот 40 получает команду на выполнение очистки пылесосом, то контроллер 46 робота из нескольких рабочих модулей 11, 12, 13 и 14 выбирает тот рабочий модуль, который должен использоваться при очистке пылесосом, т.е. модуль 11 для уборки. Затем контроллер 46 робота определяет, может ли указанная в команде работа быть выполнена с использованием рабочего модуля 10, который в данное время соединен с элементом 43 для стыковки, или не может. Если бы с мобильным роботом 40 был соединен модуль 13 для очистки воздуха, как показано на фиг.1, то выполнить указанное рабочее задание по уборке было бы невозможно. Следовательно, контроллер 46 робота меняет модуль 13 для очистки воздуха на модуль 11 для уборки. Ниже описывается, как контроллер 46 робота меняет модуль 13 для очистки воздуха на модуль 11 для уборки.
Во-первых, контроллер 46 робота подтверждает положение третьего элемента 33 для подсоединения модуля модульной станции 20, предназначенного для отсоединения и присоединения модуля 13 для очистки воздуха, который соединен с мобильным роботом 40. Затем, если контроллер 46 робота запоминает положение третьего элемента 33 для подсоединения модуля, предназначенного для подсоединения модуля 13 для очистки воздуха, то контроллер 46 вычисляет расстояние от данного положения до третьего элемента 33 для подсоединения модуля. Затем контроллер 46 робота перемещает мобильный робот 40 по вычисленному маршруту движения и помещает модуль 13 для очистки воздуха в третий элемент 33 для подсоединения модуля модульной станции 20. Затем контроллер 46 робота может переместить мобильный робот 40 и поместить модуль 13 для очистки воздуха в третий элемент 33 для подсоединения модуля, используя хорошо известные способы возврата мобильного робота к устройству для его зарядки.
Если модуль 13 для очистки воздуха помещен в третий элемент 33 для подсоединения модуля, то контроллер 29 станции управляет третьим элементом 33 для подсоединения модуля так, что подсоединяет модуль 13 для очистки воздуха. Если подсоединение модуля 13 для очистки воздуха завершено, то контроллер 46 робота отключает подачу энергии элементу 43 для стыковки модуля, а затем управляет приводом 42 таким образом, что мобильный робот 40 отсоединяется от модуля 13 для очистки воздуха, а затем перемещается от модульной станции 20.
Затем контроллер 46 робота подтверждает положение первого элемента 31 для подсоединения модулей модульной станции 20, куда подсоединен модуль 11 для уборки, а после этого вычисляет оптимальный маршрут движения мобильного робота 40 для подсоединения к модулю 11 для уборки. Затем контроллер 46 робота управляет приводом 42 таким образом, чтобы элемент 43 для стыковки модулей мобильного робота 40 вошел в ответный стыковочный элемент 57 модуля 11 для уборки. Если элемент 43 для стыковки модулей вставлен в ответный стыковочный элемент 57, то контроллер 46 робота подает энергию к элементу 43 для стыковки модуля, намагничивая его. Затем модуль 11 для уборки соединяется с мобильным роботом 40 и не удаляется от него, даже если мобильный робот 40 выполнил поставленное рабочее задание при перемещении. Процесс подсоединения мобильного робота 40 к модулю 11 для уборки аналогичен хорошо известному способу возврата мобильного робота к устройству для его зарядки.
Если соединение между элементом 43 для стыковки модулей и ответным стыковочным элементом 57 завершено, то контроллер 46 робота передает сигнал завершения стыковки в контроллер 29 станции. Затем контроллер 29 станции управляет первым элементом 31 для подсоединения модулей, с помощью которого подсоединен модуль 11 для уборки, в результате чего первый элемент 31 для подсоединения модулей отделяет модуль 11 для уборки. Если первый элемент 31 для подсоединения модулей освобождает модуль 11 для уборки, то контроллер 46 робота управляет приводом 42, в результате чего мобильный робот 40 выполняет рабочее задание по уборке согласно представленной команде.
Кроме того, если желательно выполнить чистку с модулем для очистки щеткой, то контроллер 46 робота инициирует отсоединение модуля 11 для уборки от мобильного робота 40, соединяет его с первым элементом 31 для подсоединения модулей модульной станции 20, а затем вызывает соединение мобильного робота 40 с модулем 12 для очистки щеткой. Процесс соединения модуля 12 для очистки щеткой с мобильным роботом 40 аналогичен описанному выше процессу с модулем для уборки.
Несмотря на то что выше были описаны процессы замены одного рабочего модуля на другой при соединении с мобильным роботом 40 одного рабочего модуля, модульный робот 40 может быть также присоединен к любому из нескольких рабочих модулей 11, 12, 13 и 14, подсоединенных к модульной станции 20. Процесс соединения мобильного робота 40 с рабочим модулем 10 аналогичен процессу, описанному выше.
Ниже со ссылкой на фиг.5-7 подробно описан вариант выполнения способа управления мобильной робототехнической системой с несколькими сменными рабочими модулями на основе другого аспекта данного изобретения.
В рассмотренной выше мобильной робототехнической системе 1 с несколькими сменными рабочими модулями после получения рабочей команды контроллер 46 мобильного робота 40 выбирает рабочий модуль 10, который должен использоваться для выполнения указанного в команде рабочего задания (S10). После этого контроллер 46 робота определяет, соединен ли рабочий модуль 10 с мобильным роботом 40 или нет (S11). Если рабочий модуль 10 не соединен с мобильным роботом 40, то контроллер 46 робота инициирует соединение мобильного робота 40 с предназначенным для применения рабочим модулем 10 (S40).
Однако если рабочий модуль 10 соединен с мобильным роботом 40, то контроллер 46 робота определяет, является ли или не является соединенный в данный момент рабочий модуль 10 тем рабочим модулем, который должен применяться для выполнения указанного в команде рабочего задания (S20). Например, при получении команды на уборку контроллер 46 робота определяет, является ли рабочий модуль 10, который соединен с элементом для стыковки модулей 43 мобильного робота 40, модулем 11 для уборки или не является. Если подсоединенный в данный момент рабочий модуль 10 является модулем для уборки, то контроллер 46 робота управляет приводом 42 и рабочим устройством 16 рабочего модуля 10 таким образом, что рабочий модуль 10 выполняет указанное в команде рабочее задание (S50).
Однако в случае если подсоединенный в данный момент рабочий модуль 10 не является модулем для уборки, то контроллер 46 робота мобильного робота 40 инициирует отделение подсоединенного рабочего модуля 10 и присоединение его к модульной станции 20 (S40). Этот процесс более подробно описан со ссылкой на фиг.6.
Контроллер 46 мобильного робота 40 подтверждает нахождение соответствующего элемента для подсоединения модулей из нескольких элементов 31, 32, 33 и 34 для подсоединения модулей модульной станции 20 в положение для извлечения и подсоединения рабочего модуля 10 (S31). После этого контроллер 46 робота управляет приводом 42 таким образом, что рабочий модуль 10 помещается в соответствующий элемент для подсоединения модуля, а затем присоединяется к модульной станции 20 (S32). Затем контроллер 46 робота управляет приводом 42 и элементом 43 для стыковки модулей таким образом, что мобильный робот 40 отделяется от рабочего модуля 10, а затем перемещается (S33). В то же время предпочтительней, чтобы контроллер 46 робота управлял мобильным роботом 40 таким образом, чтобы мобильный робот перемещался в положение, наиболее подходящее для соединения с рабочим модулем 10, предназначенным для использования при выполнении указанного в команде рабочего задания.
Если освобождение рабочего модуля 10 завершено, то контроллер 46 робота управляет мобильным роботом 40 таким образом, что он соединяется с рабочим модулем 10, предназначенным для использования при выполнении указанного в команде рабочего задания (S40). Ниже эта операция описана более подробно со ссылкой на фиг.7.
Контроллер 46 мобильного робота 40 подтверждает положение соответствующего элемента для подсоединения рабочего модуля 10 из нескольких элементов 31, 32, 33 и 34 для подсоединения модулей модульной станции 20, который должен применяться (S41). После этого контроллер 46 робота управляет приводом 42 таким образом, что мобильный робот 40 перемещается туда, где находится соответствующий элемент для подсоединения модулей, который должен применяться, а затем соединяется с рабочим модулем 10 (S42). В то же время ответный стыковочный элемент 57 рабочего модуля входит в элемент 43 для стыковки модулей мобильного робота 40 и соединяется с ним за счет магнитной силы элемента 43 для стыковки модуля. Если соединение рабочего модуля 10, который должен использоваться, с мобильным роботом 40 завершено, то контроллер 46 мобильного робота 40 передает сигнал завершения стыковки (S43). Затем контроллер 29 модульной станции 20 освобождает рабочий модуль 10, который должен использоваться, из его элемента для подсоединения модуля (S44). Если рабочий модуль 10 вышел из соответствующего элемента для подсоединения модуля, то мобильный робот 40 перемещается и выполняет указанное в команде рабочее задание (S50).
Поскольку мобильный робот предназначен для выполнения поставленного рабочего задания во время движения, то в соответствии с данным изобретением необходим только один рабочий модуль из различных рабочих модулей, имеющих различные функции. Поэтому размер и вес мобильного робота не увеличиваются по сравнению с обычным мобильным роботом.
Более того, мобильный робот по данному изобретению может из нескольких рабочих модулей, подсоединенных к модульной станции и имеющих различные функции, выбирать рабочий модуль, способный выполнять требуемую функцию. Поэтому можно выполнять различные рабочие задания по желанию пользователя. Следовательно, можно выполнять различные рабочие задания без существенного увеличения стоимости изготовления мобильного робота.
Более того, согласно данному изобретению можно расширить функции мобильного робота, приобретая один или несколько рабочих модулей по желанию пользователя, поскольку рабочие модули и модульная станция разбиты на модули согласно их функциям. То есть пользователь вначале может приобрести модульную станцию с зарядным узлом и элементом для подсоединения модулей и мобильный робот с модулем для уборки, а затем приобрести модуль для очистки щеткой и другой элемент для подсоединения модулей, расширяя тем самым модульную станцию, в результате можно расширить возможности мобильного робота от функции уборки до функции очистки щеткой. Поэтому накладные расходы для пользователя оказываются не столь значительными.
Хотя представленные варианты выполнения данного изобретения показаны и описаны для того, чтобы проиллюстрировать принцип данного изобретения, изобретение не ограничено конкретными вариантами выполнения. Понятно, что специалисты в данной области техники могут осуществить различные модификации и изменения, не выходящие за пределы сущности и объема правовой охраны изобретения, задаваемые приложенной формулой изобретения. Поэтому все подобные модификации, изменения и их эквиваленты следует рассматривать, как включенные в объем данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| Базовая станция, роботизированная система чистки и способ ее управления | 2020 |
|
RU2785339C1 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2005 |
|
RU2293647C1 |
Изобретение относится к области мобильных роботов. Технический результат - способность выполнять различные функции одним роботом при низкой его стоимости. Мобильная робототехническая система содержит несколько рабочих модулей, которые выполняют разные работы, модульную станцию, предназначенную для подсоединения нескольких рабочих модулей, и мобильный робот. Мобильный робот согласно рабочему заданию, предназначенному для выполнения, выбирает из модульной станции один из нескольких рабочих модулей и соединяется с ним. Выполняя рабочее задание, мобильный робот работает в автономном режиме. 3 н. и 11 з.п. ф-лы, 7 ил.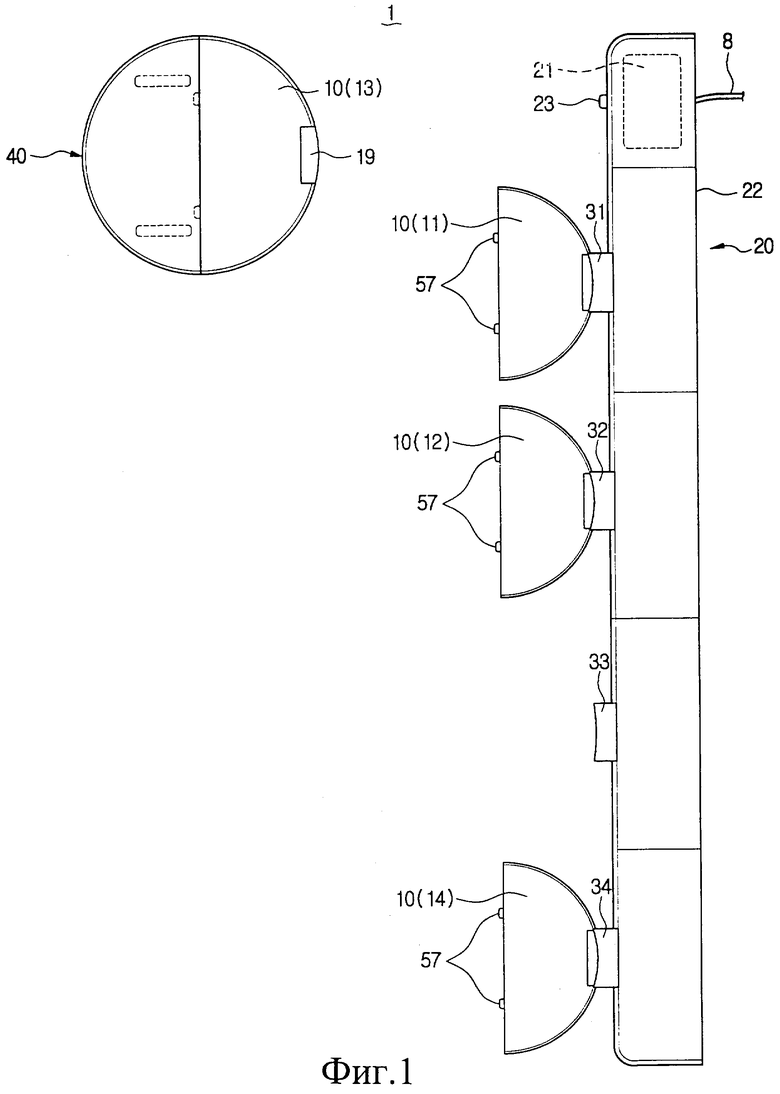
| ЧИСТЯЩИЙ АВТОМАТ, РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЧИСТЯЩЕГО АВТОМАТА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2002 |
|
RU2236814C2 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 А, 04.08.1998. | |||

