Изобретение относится к средствам радиолокации и предназначено для отображения на экране координатно-знакового индикатора (КЗИ) информации о целях, находящихся в зонах неоднозначного и однозначного измерения дальности импульсного радиолокатора обзорного типа.
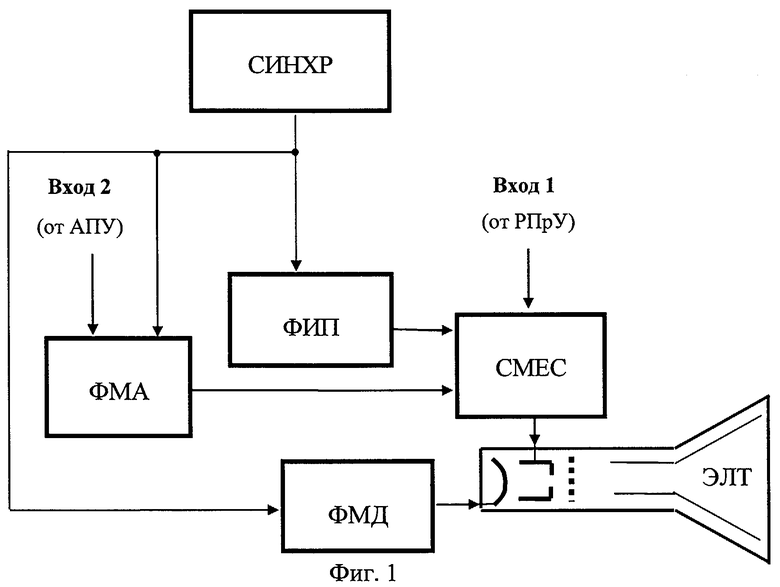
Известно устройство (Фиг.1) отображения информации о целях в радиолокационной станции (РЛС) обзорного типа, которое обеспечивает визуальную индикацию целей и измерение их дальности и азимута в полярных координатах [Белоцерковский Б.Г. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975. - С.148, рис.6-10]. Наиболее простым вариантом исполнения данного устройства служит применение в качестве выходного устройства отображения отметок целей индикатора кругового обзора (ИКО) с радиально-круговой разверткой, выполненного на электронно-лучевой трубке (ЭЛТ). Для формирования информации о целях и отображения обстановки вокруг РЛС в данном устройстве эхо-сигналы, поступающие от радиоприемного устройства (РПрУ) (Вход 1 устройства), импульсы подсвета, а также масштабные метки азимута поступают на смеситель, выход которого в свою очередь соединен с анодом ЭЛТ. Масштабные метки дальности поступают на катод ЭЛТ. Формирователь импульсов подсвета (ФИП), формирователь масштабных меток дальности (ФМД) и формирователь масштабных меток азимута (ФМА) имеют общую синхронизацию, которая обеспечивает правильность измерения дальности и азимута целей. На второй вход ФМА (Вход 2 устройства) дополнительно поступают сигналы с датчиков антенно-поворотного устройства (АПУ) радиолокатора для сохранения синхронизации между угловым положением антенны радиолокатора и угловым положением линии развертки. Отметка цели на экране ИКО отображается в виде дужки. Таким образом, в ИКО азимут цели определяется угловым положением радиуса, пересекающего середину дуги отметки цели, а дальность определяется длиной радиуса, пересекающего данную отметку цели.
В современных РЛС вместо ЭЛТ применяется координатно-знаковый индикатор (КЗИ), который использует монитор в качестве устройства отображения информации и имеет следующие преимущества по сравнению с индикаторами на ЭЛТ: меньше массогабаритные характеристики, уменьшенное потребление электроэнергии при высокой яркости и контрастности изображения, доступность подключения к любым цифровым устройствам, высокая частота кадровой и строчной разверток и т.д. Все эти достоинства приводят к лучшей наблюдаемости и информативности отметок и формуляров целей, к возможности использования широкой гаммы передаваемых цветов. Основные принципы отображения информации о местоположении целей остаются прежними: отметки целей располагаются в точке пересечения окружности, радиус которой определяется дальностью до цели, и линии, исходящей из начала координат и определяющей угловое положение цели.
При использовании устройства отображения информации, схема которого представлена на Фиг.1, на экране ИКО отображаются все обнаруженные цели:
- «Нормальные цели» (цели, находящиеся в рабочей по дальности зоне РЛС);
- «Зашкальные цели» (цели, находящиеся за пределом однозначного измерения дальности РЛС).
Наличие целей, находящихся за пределом однозначного измерения дальности, на экране ИКО приводит к появлению ложной информации, поскольку измеряемое расстояние до этих целей не соответствует истинному.
Эти помехи затрудняют работу оператора РЛС. В автоматизированной системе они загружают процессор вторичной обработки информации и могут привести к потере или полному срыву сопровождения полезных целей.
Известно устройство (Фиг.2), которое применяется в РЛС с вобуляцией межимпульсного интервала (ВМИИ) для устранения ложной информации, создаваемой целями, находящимися в зоне неоднозначного измерения дальности РЛС [Кострова Т.Г., Матвиенко Е.В., Дыранов Ю.В., Соколик А.А. Методы, алгоритмы и устройства снижения уровня помех, обусловленных неоднозначностью измерения дальности в импульсных РЛС. // Методы и устройства передачи и обработки информации: Межвузовский сборник научных трудов. Вып.6. - СПб.: Гидрометеоиздат, 2004. - С.105-108, рис.1]. (Здесь и далее двойными стрелками обозначено прохождение векторных сигналов или кодовых последовательностей, одинарными - аналоговых и цифровых скалярных сигналов, в том числе битового потока, т.е. последовательности нулей или единиц). Данное устройство содержит: основной канал обнаружения (ОКО); канал дополнительной обработки (КДО), работающий в соответствии с заранее выбранным критерием; логическую схему «И» (ЛС И). На выходе ОКО формируются признаки обнаружения всех целей, сигналы которых превысили порог обнаружения, в виде логической «1». Если цель не обнаружена, то на выходе ОКО выдается логический «0». В канале дополнительной обработки производится анализ поступающих пачек импульсов по признаку принадлежности к зоне однозначного или неоднозначного измерения дальности. Если принимается решение о том, что пачка эхо-сигналов принадлежит зоне однозначного измерения дальности, то на выходе КДО формируется логическая «1». Если в соответствии с выбранным критерием принимается решение о том, что пачка эхо-сигналов принадлежит зоне неоднозначных измерений дальности, то на выходе КДО формируется логический «0». На выходе ЛС И формируется признак обнаружения «Нормальной цели» в виде логической «1» при одновременном наличии на ее входах логических «1». В результате работы данной схемы подавляются признаки обнаружения «Зашкальных целей», т.е. целей, находящихся за пределами однозначного измерения дальности РЛС.
Вход данного устройства (Вход) подключается к выходу радиоприемного устройства (РПрУ), выход устройства (Выход) - к Входу 1 устройства, структурная схема которого приведена на Фиг.1. Включение этого устройства в состав процессора первичной обработки сигналов на выходе РПрУ позволяет очистить экран ИКО от ложных отметок целей, находящихся в зоне неоднозначного измерения дальности РЛС, обеспечивает корректное измерение дальности до отображаемых на экране ИКО целях, позволяет повысить качество представляемой информации об обстановке в воздушном пространстве в пределах однозначно измеряемой дальности РЛС (в рабочей зоне РЛС). В случае использования сложных сигналов для зондирования воздушной обстановки вокруг РЛС в состав процессора первичной обработки сигналов входит также устройство сжатия сигналов.
При использовании подобного устройства устранения «Зашкальных целей» (Фиг.2) совместно с устройством отображения информации в виде ИКО (Фиг.1) теряется вся информация о целях, находящихся в зоне неоднозначного измерения дальности РЛС, которая может оказаться для оператора РЛС полезной. Это является недостатком комплексирования двух изложенных технических решений.
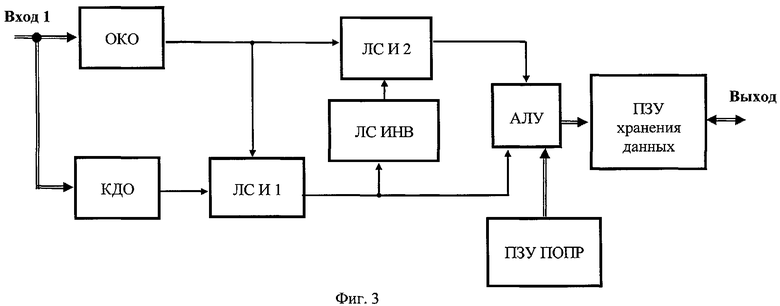
Известно устройство (Фиг.3) устранения неоднозначности измерений дальности до целей, находящихся за пределами зоны однозначного измерения, которое предназначено для работы в составе обзорной РЛС с ВМИИ [Заявка на изобретение № 2007126665/ 20(029025) от 29 августа 2007. Устройство устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции. // Беляков Е.С., Кострова Т.Г., Антуфьев Р.В., Костров В.В.]. Данное устройство осуществляет обнаружение целей, классификацию и распределение целей по признаку «Нормальная цель» и «Зашкальная цель», устраняет неоднозначность измерения дальности до «Зашкальных целей», т.е. целей, находящихся за пределами зоны однозначного измерения дальности. Данное устройство состоит из следующих блоков: ОКО - основной канал обнаружения, КДО -канал дополнительной обработки, ЛС И 1 и ЛС И 2- логические схемы «И» (соответственно первая и вторая), ЛС ИНВ - логическая схема «Инверсия», АЛУ - арифметико-логическое устройство, ПЗУ ПОПР - постоянное запоминающее устройство поправок и ПЗУ хранения данных - постоянное запоминающее устройство хранения данных. На вход устройства (Вход 1) поступает пачка сигналов от РПрУ с соответствующим кодом измеренной дальности Ri от целей, находящихся как в пределах, так и за пределами рабочей зоны радиолокатора. Код дальности имеет вид К разрядного слова, где старший разряд используется для разделения целей по признаку принадлежности к зонам однозначных или неоднозначных измерений дальности, а остальные К-1 разрядов используются для кодирования дальности. На основании анализа поступающих сигналов в этом устройстве производится разделение сигналов «Нормальных целей» и «Зашкальных целей» на два потока и формирование двух шкал дальности. Анализ сигналов и формирование двух шкал дальности осуществляется следующим образом:
1) Признаки обнаружения, полученные на выходе ОКО, объединяются с результатом классификации КДО в схеме ЛС И 1. На выход логической схемы ЛС И 1 признаки обнаружения «Зашкальных целей» не пропускаются, поэтому на ее выходе остаются лишь признаки обнаружения «Нормальных целей». Первая шкала дальности формируется после логической схемы ЛС И 1 и содержит информацию только о дальности «Нормальных целей», поскольку все признаки обнаружения «Зашкальных целей» после ЛС И 1 подавлены.
2) Полученные на выходе ОКО признаки обнаружения объединяются в логической схеме ЛС И 2 с признаками обнаружения, которые сформированы на выходе ЛС И 1 и проинвертированы в схеме ЛС ИНВ. На выходе логической схемы ЛС И 2 признаки обнаружения «Нормальных целей» подавляются; остаются лишь признаки обнаружения «Зашкальных целей». Таким образом, вторая шкала дальности формируется после логической схемы ЛС И 2 и содержит информацию только о дальности «Зашкальных целей», поскольку все признаки обнаружения «Нормальных целей» в логической схеме ЛС И 2 подавлены.
В арифметико-логическом устройстве для второй шкалы дальности производится коррекция измеренной дальности Ri с учетом поправок на неоднозначность измерения дальности. Поправки извлекаются из ПЗУ ПОПР в соответствии с используемыми периодами следования зондирующего сигнала. Объединенные для двух шкал признаки обнаружения и скорректированные данные о дальностях до обнаруженных целей передаются в ПЗУ хранения данных. Таким образом, в ПЗУ хранения данных аккумулируется информация обо всех обнаруженных целях, которая передается на выход устройства (Выход) для последующей обработки и наглядного отображения.
Вход данного устройства (Вход 1) подключается к выходу радиоприемного устройства (РПрУ), выход устройства (Выход) после соответствующего преобразования сигналов - к Входу 1 устройства, структурная схема которого приведена на Фиг.1. При совместном использовании устройств, схемы которых приведены на Фиг.1 и Фиг.3, появляется возможность отображения на экране КЗИ информации о «Зашкальных целях», т.е. о целях, находящихся в зоне неоднозначного измерения дальности. При этом из-за ограничения размеров экрана индикатора возникает необходимость уменьшения масштаба изображения на экране ИКО, что приводит к следующим последствиям: уменьшается разрешающая способность РЛС; мелкие детали, находящиеся на экране ИКО, могут быть пропущены оператором РЛС; затрудняется зрительное сопровождение оператором РЛС целей, находящихся в пределах рабочей зоны РЛС, т.к. полезная площадь экрана ИКО, соответствующая рабочей зоне РЛС, уменьшается.
Устройство отображения информации о целях в обзорной РЛС, в котором для визуальной индикации отметок целей используется ИКО (Фиг.1), выбранное в качестве прототипа, состоит из следующих блоков: блок ФИП - формирователь импульсов подсвета, блок ФМА - формирователь масштабных меток азимута, блок ФМД - формирователь масштабных меток дальности, блок СМЕС - смеситель, блок СИНХР - синхронизатор и ЭЛТ - электронно-лучевая трубка. Для отображения результатов кругового обзора пространства применяют радиально-круговую развертку. Система развертки на схеме Фиг.1 условно не показана. На Вход 1 устройства (вход блока СМЕС) поступают сигналы от РПрУ, содержащие кроме шумов и помех отраженные эхо-сигналы от целей. Отметка цели на экране ИКО отображается в виде дужки. Для повышения точности измерений используются метки азимута и дальности, которые формируются в ФМА и ФМД. Для отображения прямого хода развертки и устранения обратного хода луча развертки применяется ФИП. Блоки ФИП, ФМД и ФМА имеют общую синхронизацию от блока СИНХР, которая обеспечивает правильность измерения дальности и азимута целей. Сигналы с ФИП, ФМА и отраженные сигналы смешиваются в смесителе и поступают на анод ЭЛТ, сигналы с ФМД поступают на катод ЭЛТ. Благодаря общей синхронизации возникает единственная на данном азимуте и на данной дальности отметка цели. При использовании данного устройства часть эхо-сигналов не анализируется, так как нет возможности отображения на экране КЗИ информации о целях, находящихся в зоне неоднозначного измерения дальности импульсного радиолокатора. Отсутствие информации о подобных обнаруженных целях приводит к снижению ценности представленной информации и, в свою очередь, делает выходное устройство отображения радиолокационной информации менее информативным.
Основной задачей, решаемой предлагаемым устройством (Фиг.4) отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов, является классификация целей на экране КЗИ, которая обеспечивает разделение целей по признаку «Нормальная цель» и «Зашкальная цель» для наиболее полной и достоверной оценки воздушного пространства в рабочей зоне и в зоне неоднозначного измерения дальности радиолокатора.
Указанный технический результат достигается тем, что в известном устройстве отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов осуществляется отображение целей по признаку их принадлежности к целям, находящимся в рабочей зоне и в зоне неоднозначного измерения дальности радиолокатора, распределение целей по признаку «Нормальная цель» и «Зашкальная цель». Причем отметки целей, находящиеся в рабочей по дальности зоне радиолокатора, отображаются на экране КЗИ в виде крестиков (на современных КЗИ для маркировки обнаруженных целей можно использовать разнообразные упрощенные условные обозначения и знаки, в частности крестики), а отметки целей, находящиеся в зоне неоднозначного измерения дальности радиолокатора, отображаются на экране КЗИ в виде стрелок, расположенных на внешней стороне окружности, соответствующей максимальной дальности отображаемой зоны действия РЛС и выбранному масштабу.
В предлагаемом устройстве (Фиг.4) отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов указанный технический результат достигается тем, что в известное устройство, содержащее синхронизатор (блок 1 - СИНХР), формирователь масштабных меток дальности (блок 2 - ФМД), формирователь масштабных меток азимута (блок 3 - ФМА), смеситель (блок 4 - СМЕС), дисплейный адаптер (блок 5 - ДА) и монитор (блок 6 - Монитор), введены дополнительно: постоянное запоминающее устройство хранения данных (блок 7 - ПЗУ данных), схема выбора кодов дальности, соответствующих целям, находящимся в пределах неоднозначно измеряемой дальности радиолокатора (блок 8 - СВ Ri ЗШЦ), схема выбора кодов дальности, соответствующих целям, находящимся в рабочей по дальности зоне радиолокатора (блок 9 - СВ Ri НЦ), схема вычисления знака изменения расстояния до целей, находящихся в зоне неоднозначного измерения дальности радиолокатора (блок 10 - СВЗ ЗШЦ), схема выбора цвета стрелок (блок 11 - СВЦ), процессор обработки информации (блок 12 - Процессор) и знакогенератор стрелки (блок 13-ЗС).
Примечания:
1) Дисплейный адаптер ДА осуществляет общее управление режимами работы монитора, в том числе формирует импульсы подсвета, т.е. выполняет функции ФИП.
2) Дисплейные адаптеры или видеокарты поддерживают одновременно несколько интерфейсов для подключения различных типов мониторов, поэтому может использоваться монитор с ЭЛТ или жидкокристаллический монитор [Гук М. Аппаратные средства IBM PC. Энциклопедия. - С-Пб.: Питер, 2001.-С.491, рис.7.5].
Входом устройства является Вход 1, являющийся входом блока 7 ПЗУ данных. Первый выход блока 7 ПЗУ данных соединен с входом блока 9 СВ Ri НЦ, выход которого в свою очередь соединен с входом блока 12 Процессор. Второй выход блока 7 ПЗУ данных в свою очередь соединен с входом блока 8 СВ Ri ЗШЦ, выход которого соединен с входом блока 10 СВЗ ЗШЦ, битовый выход которого соединен с битовым входом блока 12 Процессор, и с входом блока 11 СВЦ, выход которого также соединен с входом блока 12 Процессор. Выход блока 13 ЗС также соединен с входом блока 12 Процессор. Входы блока 3 ФМА и блока 12 Процессор дополнительно соединены с датчиками АПУ радиолокатора (через Вход 2). Выход блока 12 Процессор соединен с входом блока 4 СМЕС. Выход блока 3 ФМА, как и выход блока 2 ФМД, соединены с входами блока 4 СМЕС, выход которого в свою очередь подключается к входу блока 5 ДА. Выход блока 5 ДА соединен с входом блока 6 Монитор. Для обеспечения общей синхронизации выход блока 1 СИНХР соединен с синхровходами блоков 2 ФМД, 3 ФМА, 10 СВЗ ЗШЦ, 11 СВЦ и 12 Процессор.
Предлагаемое устройство отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов решает следующие задачи:
- отображение отметок обнаруженных целей, находящихся в рабочей по дальности зоне радиолокатора, на экране КЗИ в виде крестиков (или других упрощенных знаков);
- отображение отметок обнаруженных целей, находящихся в зоне неоднозначного измерения дальности радиолокатора, на экране КЗИ в виде стрелок, расположенных на внешней стороне окружности, соответствующей максимальной дальности отображаемой зоны действия РЛС и выбранному масштабу;
что свидетельствует о соблюдении требования единства изобретения.
На Фиг.1 изображена структурная схема устройства (прототип), которое реализует выбранную индикацию целей, на Фиг.2 - устройство для устранения ложной информации о целях, находящихся в зоне неоднозначного измерения дальности РЛС с ВМИИ, на Фиг.3 - устройство устранения неоднозначности измерений дальности до целей, находящихся за пределами рабочей зоны РЛС с ВМИИ, на Фиг.4 - структурная схема предлагаемого устройства, с помощью которого производится предлагаемая индикация целей, на Фиг.5 изображен фрагмент изображения на экране КЗИ, использующего предлагаемую индикацию целей.
Предлагаемое устройство отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов (Фиг.4) осуществляет отображение отметок целей, находящихся в рабочей зоне радиолокатора, в виде крестиков, а отметок целей, находящихся в зоне неоднозначного измерения дальности радиолокатора, в виде стрелок. В качестве знакогенератора стрелки (блок 13 - ЗС) применяется постоянное запоминающее устройство [Гук М. Аппаратные средства IBM PC. Энциклопедия. - С-Пб.: Питер, 2001. - С.466, рис.7.4], на старшие адресные входы которого поступает код текущего символа, а на младшие - номер текущей строки в отображаемой линии знакомест. Причем выбор текущей строки происходит исходя из битового сигнала «Направление стрелки», являющегося результатом обработки кода дальности целей, находящихся в зоне неоднозначного измерения дальности РЛС (блок 10 СВЗ ЗШЦ), влияющего на направление стрелки (логическая «1» - направление стрелки на радиолокатор, логический «0» - направление стрелки от радиолокатора), а выбор кода текущего символа происходит исходя из поступающего с АПУ кода азимута Ai. Таким образом, достигается отображение информации о целях, находящихся в зоне неоднозначного измерения дальности радиолокатора.
Предлагаемое устройство представлено на Фиг.4. Первый вход данного устройства (Вход 1) является входом ПЗУ данных (блок 7) и соединяется с выходом устройства обработки сигналов (УОС), выполненного, например, по схеме Фиг.3. На второй вход устройства (Вход 2) от датчиков антенно-поворотного устройства (АПУ) поступает код угловой координаты (азимут). К этому входу подсоединены вход ФМА (блок 3) и один из входов Процессора (блок 12). Для обеспечения общей синхронизации выход блока 1 СИНХР соединен с синхровходами блоков 2 ФМД, 3 ФМА, 10 СВЗ ЗШЦ, 11 СВЦ и 12 Процессор. Это обеспечивает правильность измерения дальности и азимута целей.
От УОС в блок 7 (ПЗУ данных) передаются коды дальности Ri всех обнаруженных целей (т.е. обнаруженных целей, находящихся в зонах однозначного и неоднозначного измерения дальности радиолокатора), а также признаки их классификации по признаку «Нормальная цель» / «Зашкальная цель». Указанные коды дальностей и признаки классификации целей хранятся в ПЗУ данных (блок 7). Первый выход ПЗУ данных (блок 7) соединен с входом СВ Ri НЦ (блок 9) - данная схема позволяет сделать выборку кодов дальности только «Нормальных целей», выход которого в свою очередь соединен с входом блока 12 Процессор, который преобразует коды дальности, поступающие с выхода блока 9 СВ Ri НЦ, и коды азимута, поступающие с Входа 2, из полярной системы координат в прямоугольную. Второй выход ПЗУ данных (блок 7) в свою очередь соединен с входом СВ Ri ЗШЦ (блок 8) - данная схема позволяет сделать выборку кодов дальности только «Зашкальных целей», выход которого соединен с входом СВЗ ЗШЦ (блок 10), битовый выход которого соединен с битовым входом блока 12 Процессор - посредством этой связи осуществляется передача сигнала «Направление стрелки», и с входом блока 11 СВЦ, выход которого также соединен с входом блока 12 Процессор - данное соединение используется для передачи кодового слова «Цвет стрелки». Сигнал «Направление стрелки» представляет собой поток бит, причем высокий логический уровень («1») соответствует направлению стрелки на радиолокатор, а низкий («0») - направлению стрелки от радиолокатора. Кодовое слово «Цвет стрелки» содержит информацию о цвете стрелки (всего имеется Р цветов), причем цвет стрелки меняется, исходя из расстояния между целью и РЛС. В качестве знакогенератора стрелки (блок 13 - ЗС) применяется постоянное запоминающее устройство, на старших адресных входах которого присутствует код текущего символа, а на младших - номер текущей строки в отображаемой линии знакомест. Знакогенератор имеет формат знакоместа L×М точек, количество отображаемых символов - F (зависит от максимального разрешения по азимуту). Исходя из количества отображаемых символов, выбирается необходимая емкость постоянного запоминающего устройства. Выходные данные содержат побитную развертку текущей строки разложения символа. Выход ЗС (блок 13) соединен с входом Процессора (блок 12).
Процессор обработки информации (блок 12) осуществляет: изменение цвета стрелки (обычно имеет размер N бит); пересчет кода азимута Ai в код, содержащий адрес текущего символа, хранящегося в знакогенераторе; управление, исходя из сигнала «Направления стрелки», выбором текущей строки в отображаемой линии знакомест; пересчет кодов дальности и азимута из полярной системы координат в прямоугольную; преобразование поступающей на него информации в вид, удобный для представления на экране Монитора (блок 6). Выход ФМД (блок 2), выход ФМА (блок 3), выход Процессора (блок 12) соединены с входами СМЕС (блок 4), выход которого, в свою очередь, соединен с ДА (блок 5), который служит для формирования изображения на экране монитора. Выход ДА (блок 5) соединен с входом Монитора (блок 6), на котором отображается радиолокационная информация о целях и другая служебная информация.
Предлагаемое устройство работает следующим образом.
На Вход 1 устройства (вход блока 7 - ПЗУ данных) от устройства обнаружения целей поступают сигналы целей с соответствующим кодом дальности Ri от целей, находящихся в пределах рабочей зоны и за пределами рабочей зоны радиолокатора. Причем, если в старшем разряде кода дальности присутствует логическая «1», то данная цель трактуется как «Нормальная цель», логический «0» трактуется как «Зашкальная цель». Далее происходит распределение целей по признаку «Нормальная цель» (используется блок 9 - СВ Ri НЦ) и «Зашкальная цель» (соответственно используется блок 8 - СВ Ri ЗШЦ). Логика работы данных блоков обеспечивает выполнение операции «Наложение маски». Блоки 3 (ФМА) и 2 (ФМД) служат для повышения точности и обеспечения единства измерения азимута и дальности целей, находящихся как в рабочей зоне, так и в зоне неоднозначного измерения дальности РЛС. Они имеют общую синхронизацию, блок 3 (ФМА) также синхронизирован с АПУ для единства измерения азимута. После классификации целей происходит следующая обработка информации:
А) для целей, находящихся в пределах рабочей зоны РЛС: коды дальности «Нормальных целей» поступают в блок 12 Процессор, в котором коды дальности «Нормальных целей» преобразуются из полярной системы координат в прямоугольную. Затем, после преобразования координат, коды дальности «Нормальных целей» поступают в СМЕС (блок 4), а сами «Нормальные цели» отображаются на экране КЗИ в виде крестика (или другого условного обозначения). Причем азимут цели определяется угловым положением радиуса, пересекающего центр отметки цели, а дальность определяется длиной радиуса, пересекающего данную отметку цели;
Б) для целей, находящихся за пределами зоны однозначного измерения дальности РЛС: коды дальности «Зашкальных целей» одновременно поступают на входы блоков 10 (СВЗ ЗШЦ) и 11 (СВЦ). Коды дальности «Зашкальных целей» обрабатываются в СВЗ ЗШЦ (блок 10), и результатом обработки является битовый сигнал «Направление стрелки». Здесь возможно две ситуации:
Б.1) если битовый сигнал «Направление стрелки» представлен высоким логическим уровнем («1»), то процессор обработки информации (блок 12) выбирает первый банк памяти знакогенератора (блок 13) и стрелка будет отображаться на экране Монитора (блок 6) направленной по радиусу к радиолокатору, а угловое положение стрелки в пространстве будет выбираться исходя из пересчитанного кода азимута Ai, поступающего от АПУ;
Б.2) если битовый сигнал «Направление стрелки» представлен низким логическим уровнем («О»), то процессор обработки информации (блок 12) выбирает второй банк памяти знакогенератора (блок 13) и стрелка будет отображаться на экране Монитора (блок 6) направленной по радиусу от радиолокатора, а угловое положение стрелки в пространстве будет выбираться исходя из пересчитанного кода азимута Ai, поступающего также от АПУ.
Дополнительно коды дальности «Зашкальных целей» обрабатываются в СВЦ (блок 11), где результатом обработки служит слово «Цвет стрелки», код которого содержит информацию о цвете стрелки, зависящего от расстояния между «Зашкальной целью» и радиолокатором. Слово «Цвет стрелки» вводится для более полной и комплексной оценки воздушной обстановки вокруг радиолокатора. Выходные данные ЗС (блока 13), поступающие в Процессор (блок 12), содержат побитную развертку текущей строки разложения символа. Далее процессор обработки информации (блок 12) осуществляет изменение цвета стрелки, исходя из сигналов, поступающих на его вход с блоков: СВЦ (блок 11) - «Цвет стрелки» и СВЗ ЗШЦ (блок 10) - «Направление стрелки», ЗС (блок 13) - общая конфигурация стрелки. Для обеспечения общей синхронизации выход блока 1 СИНХР соединен с синхровходами блоков 2 ФМД, 3 ФМА, 10 СВЗ ЗШЦ, 11 СВЦ и 12 Процессор, что обеспечивает правильность измерения дальности и азимута целей. Затем Процессор (блок 12) преобразовывает поступающую на него информацию в вид, удобный для передачи на смеситель СМЕС (блок 4) через дисплейный адаптер ДА (блок 5) для последующего отображения информации на экране Монитора (блок 6). В СМЕС (блок 4) поступает вся необходимая информация для отображения отметок о целях, находящихся как в пределах рабочей зоны РЛС, так и за пределами зоны однозначного измерения дальности. Далее вся информация с выхода СМЕС (блок 4) поступает на вход ДА (блок 5), где она преобразуется в вид, удобный для отображения ее на Мониторе (блок 6). Монитор (блок 6) является конечным устройством отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов.
Фрагмент экрана монитора (блок 6) при отображении радиолокационной информации в полярной системе координат приведен на Фиг.5. На Фиг.5 концентрические окружности представляют собой метки дальности, вырабатываемые ФМД (блок 2). Лучи, исходящие из центра окружностей, являются метками азимута, формируемыми в ФМА (блок 3). Цифровыми позициями обозначены:
1 - отметка цели, находящейся за пределами однозначно измеряемой дальности РЛС, движущаяся в направлении радиолокатора;
2 - отметка цели, находящейся за пределами однозначно измеряемой дальности РЛС, удаляющаяся от радиолокатора;
3 - отметка цели, находящейся в пределах рабочей по дальности зоне РЛС.
Предлагаемое устройство отображения информации о целях в импульсной обзорной РЛС с вобуляцией периода следования зондирующих сигналов позволяет отображать информацию о целях, находящихся не только в пределах рабочей зоны радиолокационной станции, но и за пределами зоны однозначного измерения дальности, что делает процесс наблюдения целей более достоверным, надежным, а зона действия радиолокатора расширяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
| УСТРОЙСТВО УСТРАНЕНИЯ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЙ ДАЛЬНОСТИ ДО ЦЕЛЕЙ, НАХОДЯЩИХСЯ ЗА ПРЕДЕЛАМИ РАБОЧЕЙ ЗОНЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2358284C2 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2341813C2 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2234714C2 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2131612C1 |
| Способ и система для контроля радиолокационной станции | 2016 |
|
RU2648585C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |



Заявленное изобретение может использоваться в импульсной радиолокации с вобуляцией межимпульсного интервала для отображения целей по признаку их принадлежности к целям, находящимся в рабочей зоне («Нормальные цели») и за пределами максимальной однозначно измеряемой дальности радиолокатора («Зашкальные цели»), распределения целей по признаку «Нормальная цель» и «Зашкальная цель». Причем отметки «Нормальных целей» отображаются на экране координатно-знакового индикатора (КЗИ) в виде крестиков (на современных КЗИ для маркировки обнаруженных целей используются разнообразные знаки, в частности крестик), а отметки «Зашкальных целей» отображаются на экране КЗИ в виде стрелок, расположенных на внешней стороне окружности, соответствующей выбранному масштабу. Сущность изобретения заключается в том, что в известное устройство, содержащее синхронизатор, формирователь масштабных меток азимута, формирователь масштабных меток дальности, смеситель, дисплейный адаптер и монитор, дополнительно включены постоянное запоминающее устройство хранения данных, схемы выбора кодов дальности «Нормальных целей» и «Зашкальных целей», схема вычисления знака изменения расстояния до «Зашкальных целей», схема выбора цвета стрелок, процессор обработки информации и знакогенератор стрелки. Достигаемый технический результат - повышение достоверности обнаружения целей и расширение зоны действия радиолокатора. 5 ил.
Устройство отображения информации о целях в импульсной обзорной радиолокационной станции с вобуляцией периода следования зондирующих сигналов, содержащее синхронизатор (блок 1 - СИНХР), формирователь масштабных меток дальности (блок 2 - ФМД), формирователь масштабных меток азимута (блок 3 - ФМА), смеситель (блок 4 - СМЕС), дисплейный адаптер (блок 5 - ДА), монитор (блок 6 - МР), отличающееся тем, что введены дополнительные блоки: постоянное запоминающее устройство хранения данных (блок 7 - ПЗУ данных), схема выбора кодов дальности целей, находящихся в пределах неоднозначно измеряемой дальности радиолокатора («Зашкальные цели») (блок 8 - СВ Ri ЗШЦ), схема выбора кодов дальности целей, находящихся в рабочей по дальности зоне радиолокатора («Нормальные цели») (блок 9 - СВ Ri НЦ), схема вычисления знака изменения расстояния до «Зашкальных целей» (блок 10 - СВЗ ЗШЦ), схема выбора цвета стрелок (блок 11 - СВЦ), процессор обработки информации (блок 12 - Процессор) и знакогенератор стрелки (блок 13 - ЗС), входом 1 устройства является вход блока 7 ПЗУ данных, первый выход которого соединен с входом блока 9 СВ Ri НЦ, выход которого, в свою очередь, соединен с одним из входов блока 12 Процессор, второй выход блока 7 ПЗУ данных соединен с входом блока 8 СВ Ri ЗШЦ, выход которого соединен с входом блока 10 СВЗ ЗШЦ, битовый выход которого соединен с битовым входом блока 12 Процессор, и с входом блока 11 СВЦ, выход которого также соединен с входом блока 12 Процессор, выход блока 13 ЗС также соединен с входом блока 12 Процессор, входы блока 3 ФМА и блока 12 Процессор дополнительно соединены с датчиками антенно-поворотного устройства (АПУ) радиолокатора (через Вход 2), выход блока 12 Процессор соединен с входом блока 4 СМЕС, выход блока 3 ФМА, как и выход блока 2 ФМД, соединены с входами блока 4 СМЕС, выход которого, в свою очередь, подключен к входу блока 5 ДА, выход блока 5 ДА соединен с входом блока 6 Монитор, для обеспечения общей синхронизации выход блока 1 СИНХР соединен с синхровходами блоков 2 ФМД, 3 ФМА, 10 СВЗ ЗШЦ, 11 СВЦ и 12 Процессор.
| БЕЛОЦЕРКОВСКИЙ Б.Г | |||
| Основы радиолокации и радиолокационные устройства | |||
| - М.: Советское Радио, 1975, с.148, рис.6-10 | |||
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2001 |
|
RU2207585C2 |
| ТРЕХМЕРНЫЙ ИНДИКАТОР РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1998 |
|
RU2140091C1 |
| Способ вытягивания стеклянных трубок или дротов | 1931 |
|
SU33655A1 |
| US 5250954 A, 05.10.1993 | |||
| DE 2006033322 A1, 31.01.2008 | |||
| WO 2005088340 A1, 22.09.2005. | |||

