() ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР

| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| Инклинометр | 1984 |
|
SU1183669A1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
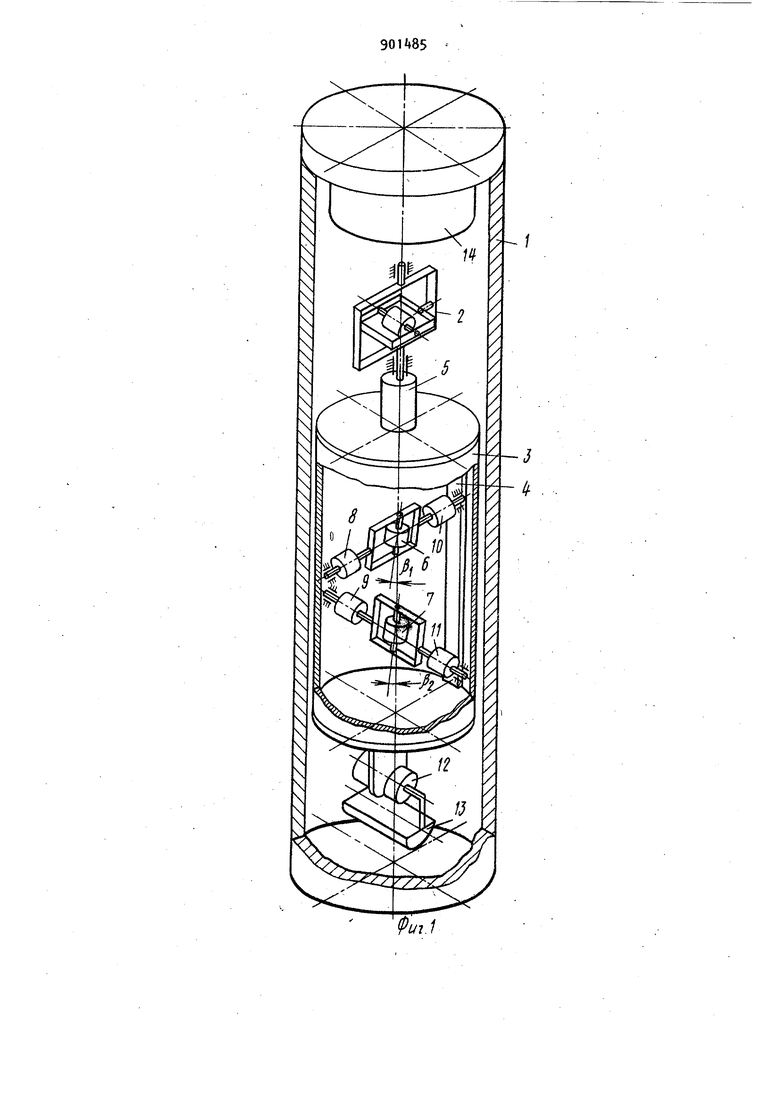
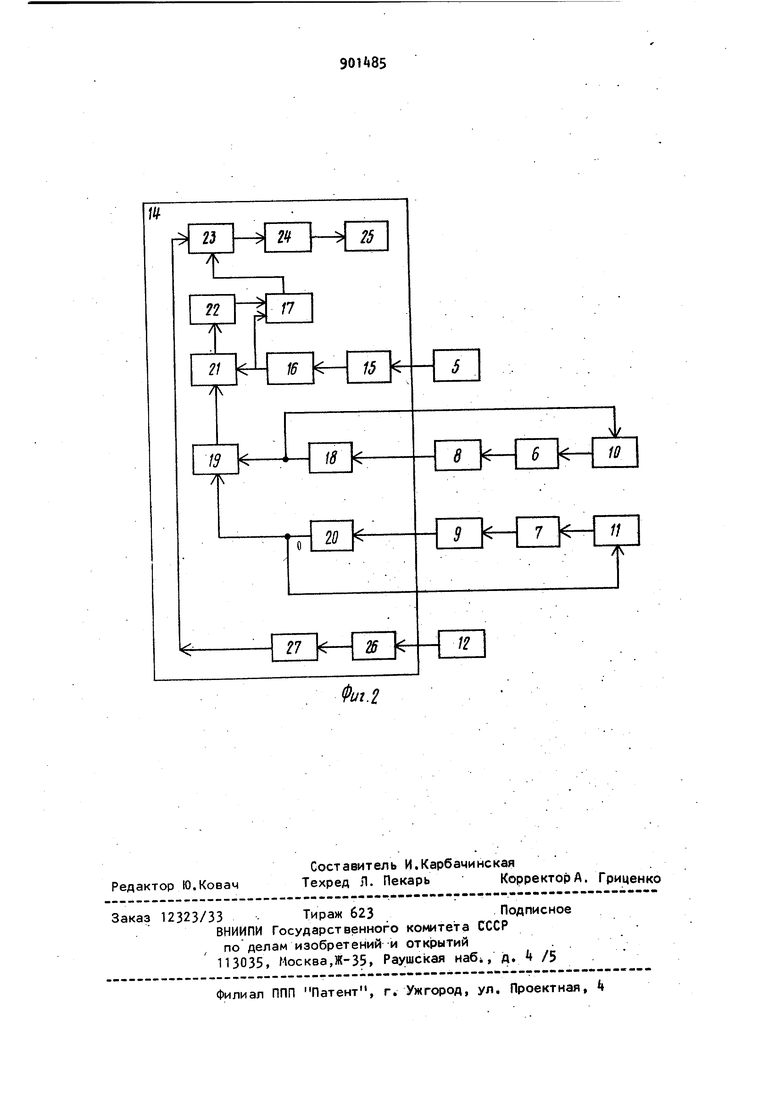
Изобретение относится к горной про вJlшлeннocти, конкретно к устройствам позволящим определить величину азимутальных и зенитных углов в глубоких и узких скважинах, где невозможно наблюдение за поведением чувствительных элементов приборов, и может быть применено при бурении нефтяных газовых и геологоразведочных скважин Известен гироскопический инклинометр, состоящий из трехстепенного гирокомпаса и маятника, применяемого например, в инклинометре фирмы Нау, . Недостатками этого устройства являются невысокая точность замеров (нескомпенсированная скорость ухода оси кинетического момента за счет возмущающих моментов и суточного вра щения Земли), а также продолжительное время измерения (до 3 ч в одной точке). Известно устройство для измерения скважин, содержащее корпус, трехстепенной гироскоп, связанный с подвижной рамкой гироскоп, в которой установлены датчики углов, и преобразовательно-измерительный блок121. Недостатком данного устройства является низкая точность измерений азимутальных углов из-за уходов трехстепенного гироскопа от возмущающих воздействий и суточного вращения Земли. Применяемые индуктивные датчики имеют низкую помехоустойчивость, что также снижает точность измерений зенитных и азимутальных углов. Кроме того, указанное устройство сложно в эксплуатации, так как перед началом требуется визирование скаажинного снаряда. Цепь изобретения - повышение точности измерения за счет учета воэму щающих воздействий на .трехстепенной гироскоп. Указанная цель достигается тем, что устройство снабжено установленным в подвижной рамке эксцентричным грузом и двумя гироскопическими двухстепенными датчиками угловой скорости, чувствительные оси которых взаимоперпендикулярны и связаны с подвижной рамкой. На фиг. 1 изображена принципиальная схема устройства; на фиг.2 - фун циональная схема. В корпусе 1 помещен свободный трехстепенной гироскоп 2 (фиг.1). Корректирующее устройство расположен в рамке 3, внутри которой для смещения центра тяжести укреплен груз k. Между трехстепенным гироскопом и рамкой корректирующего устройства установлен бесконтактный синуснокосинусный трансформатор 5, ротор ко торого жестко соединен с наружной рамкой гироскопа, а корпус с рамкой корректирующего устройства. Корректирующее устройство состоит из двух гироскопических двухстепенных датчиков угловых скоростей (ДУС ) 6 и 7, рамки которых развернуты по отношению друг к другу на угол 90° по часовой стрелке, если смот р ет ь сверху. Векторы кинематических моментов ДУС направлены вниз. Гироскопы корректируюи его устройства снабжены дат чиками 8 и 9 углов и моментны и двигателями 10 и 11. К рамке корректирующего устройства для замера зенитного угла прикреплен бесконтактный синусно-косинусный трансформатор 12, на роторе которого закреплен груз 13 Сигналы со всех измерительных элемен тов поступают в измерительно-преобра зовательный блок k. На функциональной схеме устройст ва показана взаимосвязь измерительных элементов и преобразовательного блока (фиг.2). Измерительные и преобразовательные элементы включены в следующей последовательности. Сигнал с БСКТ 5 поступает в фазосдвигающую цепь 15, связанную через цифровой фазометр 1б с суммирующим устройством 17; с датчика 8 угла сиг нал подается в усилитель 18, связанный с одним из входов вычислительного устройства 19, другой вход которого соединен с усилителем-20 на который подается сигнал с датчика 9 угла. Вычислительное устройство 19 соединено с одним из входов суммирую щего устройства 21, другой вход кото рого соединен с выходом цифрового фазометра 1б, выход же суммирующего устройства 21 соединен через запоминающее устройство 22 с сумматором 17, который соединен далее со скважинной частью 23 телесистем 1, затем через 24 с наземной панелью телесистемы 25. Причем элементы 10,6,8,18 охвачены обратной связью, а элементы 11, 7, 9, 20 охвачены другой обратной связью. Сигнал с БСКТ 12 поступает на фазосдвигающую цепь 2б, которая связана через цифровой фазометр 27 со скважинной частью 23 и затем через кабель с наземной панелью 25. t При измерении кривизны скважины прибор займет некоторое наклонное положение,.которое характеризуется азимутальным углом о. и зенитным углом 8 . Для замера азимутального угла ос используется трехстепенной гироскоп 2, бесконтактный синусно-косинусный трансформатор БСКТ 5 и корректирующее устройство (фиг.1). Так как ротор ВСКТ 5 связан с наружной рамкой трехстепенного гироскопа, а корпус с рамкой 3 корректирующего устройства, то с него будет поступать сигнал, пропорциональный углу между плоскостью наклона (рамка корректирующего устройства под действием грузов установится в плоскости наклона) и некоторым направлением, которое задается трехстепенным гироскопом. Этот сигнал через фазосдвигающую цепь 15 и цифровой фазометр 1б (для получения сигнала в цифровом виде) подается в суммирующее устройство 17. Свободный трехстепенной гироскоп под действием возмущающих моментов и суточного вращения Земли уходит от своего начального положения. Для устранения этого недостатка, а также исключения необходимости начальной выставки гироскопа на поверхности применяется корректирующее устройство. Оно вступает в работу через некоторые промежутки времени в момент остановки скважинного прибора. Корректирующее устройство работает следующим образом. Пусть первый гироскоп корректирующего устройства установлен так, азимут оси рамки равен Ct, а вектор кинематического момента отклонен от вертикали на угол J . При работающем гиромоторе гироскопичес59
кий момент от вращения Земли уравновешивается восстанавливакхцим моментом, который создается моментным двигателем 10.
С помЪщью датчика угла 8 замеряется угол jb Сигнал пропорциональный этому углу, проходит через усилитель 18 и поступает в вычислительное устройство 19,..в котором по формуле вычисляется бшосд . Кроме того,сигнал с усилителя 18 поступает на моментный двигатель 10, который уравновешивает гироскопический момент от вращения Земли. Второй гироскоп, который повернут относительно первого на угол 90 имеет азимут равный OLz . Его рамка отклоняется на угол , который замеряется датчиком угла 9. Сигнал, пропорциональный углу/ о после усилителя 20, как и в первом случае подается на моментный двигатель 11 и поступает в вычислительное устройство 19. В нем по формуле вычисляется (31,2, но о-г., т.е. второй гироскоп фактически позволяет определить ( . Значение SincM и Cosot-i с учетом их знаков достаточно для определения направления меридиана в скважине. С вычислительного устройства 19 сигнал поступает в суммирующее устройство 21, где он суммируется с сигналом, поступающим с БСКТ 5 (через фазосдвигающую цепь и цифровой фазометр).В этом блоке получается сигнал ошибки. Затем сигнал ошибки подается в запоминающее- устройство 22, а с него сигнал поступает в суммирующее устройство 17, в котором получается истинное значение азимута.Далее полученный сигнал поступает в скважинную часть телесистемы 23 и по кабелю 2 подается на наземную панель 25, где регистрируется в цифровом виде. Таким образом, с непрерывно измеряемым углом будет суммироваться сигнал ошибки, который через некоторые промежутки времени в момент остановки будет уточняться.
Зенитный угол измеряется с помощью бесконтактного синусно-косинусного трансформатора 12, на роторе которого подвешен груз 13. При изменении зенитного угла ротор БСКТ под действием . груза повернется на некоторый угол. Сигнал с БСКТ, про56
порциональный косинусу этого угла, поступает в фазосдвигающую цепь 26 и затем в цифровой фазометр 27, что позволяет получить сигнал в цифровом виде. Далее сигнал через сква-. жинную часть телесистемы 23 и ;кабель 2 подается на наземную панель телесистемы 25 и регистрирует ся на цифровом табло.
Предлагаемый гироскопический инклинометр позволяет надежно определить азимут и зенитные углы в скважинах, где невозможно непосредственное наблюдение за чувствительными элементами, так как из-за влияния магнитных масс инклинометры, которые используют магнитное поле Земли, дают неверный результат , непосредственно измерить кривизну скважины внутри
колонны стальных и легкосплавных бурильных труб без подъема их на поверхность и, кроме того, обеспемивает непрерывность измерения.
Благодаря этому резко сокращается
время на инклинометрические измерения и непроизводительные спускноодъемные операции бурильного инструмента.
Экономическая эффективность от
внедрения одного гироинклинометра сосавляет 48 тыс.руб. в год.
Формула изобретения
Гироскопический инклинометр, со-. держащий корпус, трехстепенной гироскоп, связанный с подвижной рамкой, в которой установлены датчики углов, преобразовательно-измерительный блок, отличающийся тем, что, с целью повышения точности измерения за счет учета возмущающих воздействий на трехстепенной гироскоп, он снабжен установленным в подвижной рамке эксцентричным грузом и двумя гироскопическими двухстепенными датчиками угловой скорости, чувствительные оси которых взаимоперпендикулярш и связаны с подвижной рамкой.
Источники информации принятые во внммание при экспертизе
