на порядок точнее, чем один датчик угловой скорости в описываемом устройстве, так как он работает в компенсационном режиме на уровне сигнала харайГ еризующего порог- чувствительности, и линейность датчика не играет роли; сложность конструкции; недостаточная точность.
Целью изобретения является повышение точности и надежности измерений и упрощение конструкции.
Поставленная цель достигается тем, что в гироскопическом инклинометре, содержащем корпус, трехстепенной гироскоп, два датчика угла поворота, эа крепленных на подвижной эксцентричной рамке, измерительный датчик угловой скорости, моментный двигатель, преобразовательный блок и два цифровых фазометра, датчик угловой скорости установлен на наружной рамке трехстепенного гироскопа, причем ось чувствительности датчика угловой скорости расположена перпендикулярно вектору кинетического момента трехстепенного гироскопа, выход датчика угловой скорости соединен с моментным двигателем, статор которого размещен на наружной рамке гироскопа, а ротор на внутренней.
При этом цифровые фазометры расположены в наземной части инклинометра, выходыкоторых соединены с регистратором .
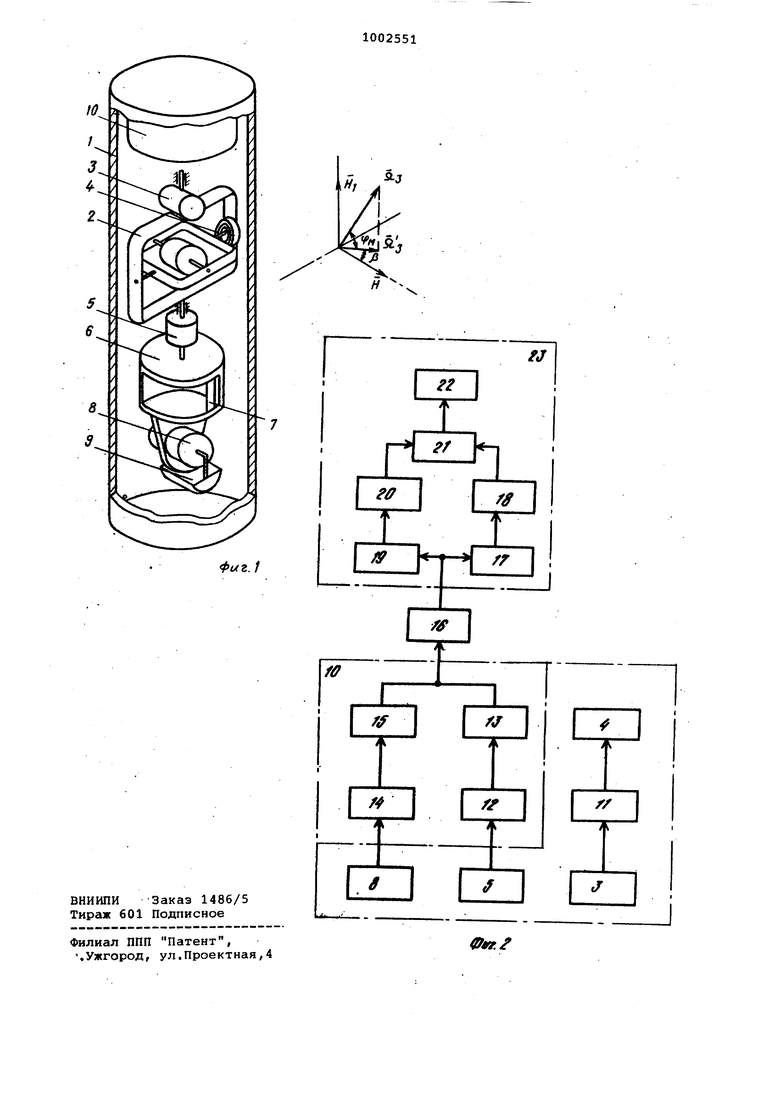
На фиг. 1 изображена принципиальная схема устройс ва; на фиг. 2 - фу н кцио и альн ая.
В корпусе 1 помещен свободный трехстепенной гироскоп 2 (фиг. 1. На наружной рамке трехстепенного гироскопа жестко закреплены измерительный датчик угловой скорости 3, моментный двигатель 4,датчик угла поворота БСКТ 5, статор которого соединен с эк сцентричнойрамкой 6. Эксцентричная рамка состоит из. корпуса ч груза 7, смещенного относительно оси поворота. С корпусом эксцентричной рамки жестко связан корпус второго датчика угла поворота БСКТ 8, на валу ротора которого закреплен маятник 9. БСКТ расположен в плоскости, перпендикулярной относительно смещенного груза эксцентричной рамки. Сигналы с БСКТ 5 и СБКТ 8 поступают в преобразовательный блок 10.
На функциональной схеме устройства показана взаимосвязь измерительных и преобразовательных элементов, которые включены в следующей последовательности: сигнал с измерительного датчика угловой скорости 3 поступает на усилитель 11 и с усилителя на моментный двигатель 4. С БСКТ 5 сигнал поступает в фазосдвигающую цепь 12, которая связана через преобразователь 13 с блоком измерения азимута наземной панели. С БСКТ 8 сигнал поступает в фазосдвигающую цепь 14, которая связана через преобразователь 15 и соединительный кабель 16 с блоком измерени зенитного угла наземной панели. Блок измерения азимутального угла наземной панели представляет собой преобразователь 1.7 и цифровой фазометр 18, а бло измерения зенитного угла - преобразо ёатель. 19 и цифровой фазометр 20. С цифровых фазометров сигналы поступают в регистратор 21 и в виде цифры фиксируются цифропечатающим устройством 22
Преобразователи азимутального и зенитного углов, цифровые фазометры, регистратор и цифропечатающее устройство заключены в наземной панели 23.
При измерении кривизны скважины продольная ось прибора устанавливается параллельно оси скважины, которая характеризуется азимутальным углом ot и зенитным : углом U . измерения азимутального угла используется трехстепенной гироскоп 2, датчик угловой скорости 3, моментный двигатель 4 и датчик угла поворота БСКТ 5 (фиг. 1}. Так как ротор БСКТ 5 связан с наружной рамкой трехстепенного гироскопа, а корпус с KOg iycoM эксцентричной рамки 6,то с него поступает сигнал, пропорциональный углу между плоскостью наклона (эксцентричная рамка установится в плоскость наклона/ и некоторым направлением, которое задается трехстепенным гироскопом. Трехстепенной гироскоп под действием возмущающих моментов прецессирует вокруг вертикальной оси вращения наружной рамки, а датчик угловой скорости не реагирует на угловую скорость прецессии, так как вектор угловой скорости прецессии направлен по оси вращения наружной рамки трехстепенного гироскопа и совпадает с направлением вектора кинетического момента гироскопического датчика угловой скорости. Ось чувствительности датчика угловой скорости составляет некоторый угол с плоскостью меридиана и с него на усилитель поступает сигнал, пропорциональный углу рассогласования в, между проекцией вектора угловой скорости вращения. Земли вектором кинетического момента трехстепенного гироскопа (фиг. l). С усилителя сигнал поступает на моментный двигатель, который заставляет прецессировать трехстепенной гироскоп до тех пор, пока он установится в плоскость меридиана и сигнал с датчика угловой скорости не будет равен нулю. Вектор кинетического момента. Н трехстепенного гироскопа устанавливается по направлению на сервер. Вектор- кинетического момента Н датчика угловой скорости направлю по оси вращения наружной рамки с трехстепенного гироскопа. СкважинМыЙ прибор во время коррекции останавливается, чтобы на него не оказывал влияния сигнал с датчика угловой скорости, возникающий при движении прибора по искривленному участку скважины, с БСКТ 5 сигнал поступает в фаэосдвигакидую цепь 12, которая связана через преобразователь 13 и соединительный кабель 16 с блоком измерения азимута наземной панели, который состоит из преобразователя 17 и цифрового фазометра 18, сигнал с которого поступает в регистратор 21 и в виде цифры фиксируется цифропечатающим устройством 22.
Зенитный угол измеряется с помощью БСКТ 8, на валу ротора которого закреплен маятник 9. При измерении зенитного угла ротор БСКТ под действием маятника поворачивается на величину этого угла. Сигнал с БСКТ, пропордиональный синусу и косинусу зенитного угла, поступает в фазосдвигающую цепь 14 и через преобразователь 15 и соединительный кабель 16 в наземную панель 23. В наземной панели сигнал через преобразователь 19 и цифровой фазометр 20 поступает в регистратор 21 и в виде цифры фиксируется цифропечатающим устройством 22.
Азимутальный и зенитный углы измеряются инклинометром непрерывно без остановки скважинного прибора, а дпя коррекции трехстепенного гироскопа скважинный прибор останавливается на время коррекции, затем измерения продолжаются.
В СССР гироскопические инклинометры серийно не выпускаются, позтому технико-экономическое обоснование может быть проведено в сравнении в серийно выпускаемыми в нашей стране инклинометрами, в которых для определения азимута используется магнитное поле Земли (кит, ик-2). Гироскопический инклинометр по сравнению с базовым образцом характеризуется надежным определением азимутальных и зенитных углов в скважинах, где невозможно непосредственное наблюдение за чувствительными элементами,так как изза влияния магнитных масс инклинометры, которые используют магнитное поле Земли, дают неверный результат; непосредственным измерением кривизны скважины внутри колонны стальных и легкосплавных бурильных труб без подъема их на поверхность, что позволяет резко сократить объем спускоподъемных операций при проводке скважины непрерывностью измерений с коррекцией азимута во время остановки.
Вследствие этого резко сокращает ся время на инклинометрические измерения и непроизводительные спускоподъемные операции бурильного инструмента. Это позволяет повысить производительность буровых работ, особенно при наклонно направленном бурении. Так наклонно направленным способом в Западной Сибири проводится более 90% всех скважин, а инклинометрические измерения при проводке этих скважин составляют 30% от общего объема всех геофизических работ. На основании этого экономическая эффективность от внедрения одного гироинклинометра составляет 48 тыс. руб. в год.
Формула изобретения
1.Гироскопический инклинометр, содержащий корпус, трехстепенной гироскоп, два датчика угла поворота, закрепленных на подвижной эксцентричной рамке, измерительный датчик угловой, скорости, моментный двигатель, преобразовательный блок и два цифровых фазометра, отличающийся тем, что, с целью повышения точности и надежности измерений и упрощения конструкции, датчик угловой скорости установлен на наружной рамке трехстепенного гироскопа, причем ось чувст-. вительности датчика угловой скорости расположена перпендикулярно вектору кинетического момента трехстепенного гироскопа, выход датчика угловой скорости соединен с моментным двигателем, статор которого размещен на наружной рамке гироскопа, а ротор - на внутренней.
2.Инклинометр по п. 1, о т л и чающ ийся тем, что цифровые фа зометры расположены в наземной части инклинометра, выходы которых соединены с регистратором.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке 282223 /03,
кл. Е 21 В 47/022, 1970.
2.Авторское свидетельство СССР № 450883, кл. Е 21 В 47/022, 1974.
3.Авторское свидетельство СССР по заявке № 2938961/03,
кл. Е. 21 В 47/022, 1980. Фиг.1 n f Л //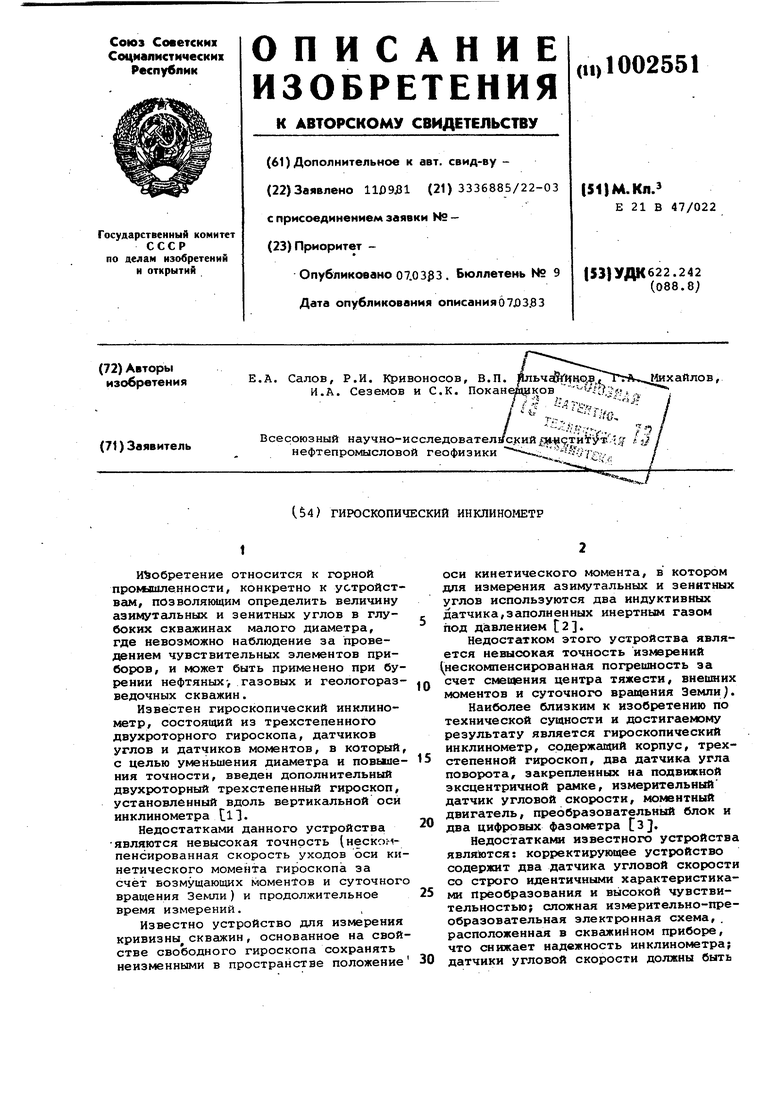
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1970 |
|
SU282223A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |