Изобретение относится к области учебно-тренировочного оборудования для выработки навыков работы в условиях перегрузок, а также в качестве развлечения.
Известно устройство системы подвижности кабины пилотажного тренажера летательного аппарата, патент RU 2247432 - прототип.
Данное устройство представляет собою вилкообразное основание с установленным на нем с возможностью вращения по углам тангажа в вертикальной плоскости вокруг горизонтальной оси, перпендикулярной плоскости симметрии летательного аппарата, поддерживающим корпусом посредством жестко закрепленных на нем полуосей, входящих в симметрично расположенные на вертикальных составляющих основания подшипниковые узлы, закрепленную на поддерживающем корпусе в механизме обеспечения подвижности платформу с установленной на ней кабиной с возможностью вращения по углам крена в вертикальной плоскости, перпендикулярной продольной оси летательного аппарата, электродвигатели с приводами угловых перемещений кабины летательного аппарата по тангажу и крену, при этом поддерживающий корпус выполнен в виде вилкообразной рамы, и приводы вращения выполнены в виде тросовой проводки, связывающей приводные по тангажу и крену электродвигатели соответственно с рамой и платформой, при этом проводка проходит по направляющим рамкам и симметрично расположенным сегментам, жестко закрепленным соответственно на раме и платформе в плоскости их вращения, механизм обеспечения подвижности по крену выполнен в виде полуосей, вращающихся в подшипниковых узлах и установленных симметрично на оси вращения, приводные электродвигатели установлены на неподвижном основании, а их приводы, образующие замкнутые контуры с рамой и платформой, расположены в двух перпендикулярных плоскостях, при этом привод вращения по крену выполнен в виде наружного и внутреннего контуров тросовой проводки, соединенных между собой компенсатором крутящих моментов, причем, по крайней мере, один ролик каждого контура тросовой проводки снабжен натяжителем.
Недостатком указанного устройства является недостаточное количество степеней свободы кабины управления и ограниченное угловое вращение при движении по крену и тангажу.
Техническим результатом изобретения является увеличение степеней свободы тренажера и повышение их скоростных изменений, разработка принципиально новой кинематической схемы, что позволяет повысить быстродействие вращения в заданной плоскости и совершать тренажеру сложные пространственные движения.
Поставленная задача решается тем, что в тренажере для имитации транспортных средств, включающем кабину управления тренажером с системой ее подвижности по углам крена и тангажа, осуществляемой электродвигателями посредством тросовых приводов, согласно изобретению кабина управления тренажером размещена в двух взаимосвязанных кольцевых структурах КС-1 и КС-2, размещенных в трех взаимно перпендикулярных прочно скрепленных кольцевых металлических несущих фермах, две из которых перпендикулярны друг другу в вертикальной плоскости, перпендикулярны третьей, находящейся в горизонтальной плоскости, горизонтальная и вертикальные фермы скреплены с платформой тренажера через четыре соединительных узла с направляющими, на которых закреплены ролики перемещения, и четыре гидроцилиндра, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах, расположенных вертикально, размещена кольцевая структура КС-1, состоящая из двух колец: внутреннее неподвижное (относительно оси вращения), имеющее двутавровый профиль и прочно скрепленное с вертикальными фермами тренажера по диаметру с помощью полуосей, установленных в подшипниковых узлах, причем на нижней полуоси расположен блок, который через привод связан с блоком на редукторе реверсивного электродвигателя Д3, приводящим во вращение всю конструкцию тренажера, и внешнее подвижное кольцо структуры КС-1, имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора, жестко закреплены ролики вращения, с помощью которых внешнее кольцо подвижно скреплено с внутренним кольцом, для плавности движения внешнего кольца относительно внутреннего предусмотрены ролики, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля, расположенный на внешней стороне структуры КС-1 реверсивный электродвигатель Д1 через редуктор соединен с планетарной системой передачи, на валах которой жестко соединены барабаны с тросами определенной длины, проходящие в диаметрально противоположных направлениях по внешней поверхности кольца двутаврового профиля через жестко закрепленную систему блоков направления тросов, по жестко закрепленным роликам для прокладки тросов и соединенные с двумя симметричными сегментами кольца П-образного профиля через натяжители тросов, образуя замкнутый тросо-блочный контур, обеспечивающий высокоскоростное перемещение тренажера по крену, движение тренажера по тангажу обеспечивается системой КС-2, аналогичной по строению системе КС-1 и расположенной внутри нее в плоскости, перпендикулярной плоскости системы КС-1, внутреннее неподвижное кольцо двутаврового профиля системы КС-2 жестко скреплено с подвижным внешним кольцом П-образного профиля системы КС-1 с помощью полых полуосей, замкнутый тросо-блочный контур КС-2 с реверсивным электродвигателем Д2 обеспечивает высокоскоростное перемещение тренажера по тангажу, система управления тренажером использует беспроводную связь Wi-Fi, для этого в кабине тренажера размещены: дисплей - жестко закрепленный плазменный экран, виртуальный шлем или иная современная компьютеризированная система, предназначенная для вывода мультимедийного изображения и осуществления ввода - вывода сигналов через систему управления.
Фиг.1 - общий вид устройства спереди.
Фиг.2 - общий вид устройства сверху.
Фиг.3 - верхний и нижний соединительные подшипниковые узлы с электродвигателем Д3.
Фиг.4 - соединительный узел, гидравлический цилиндр и направляющая с роликами перемещения.
Фиг.5 - соединение системы КС-1 и КС-2.
Фиг.6 - роликовый компенсатор крутящих моментов.
Фиг.7 - механизм, обеспечивающий подвижность системы КС-1 по крену.
Фиг.8 - механизм, обеспечивающий подвижность системы КС-2 по тангажу.
Фиг.9 - электродвигатель Д1 с редуктором и планетарной системой передачи.
Фиг.10 - возможный вариант крепления двигателей в системах КС-1 и КС-2.
Фиг.11 - схема степени свободы тренажера.
Фиг.12 - схема работы устройства по тангажу.
Фиг.13 - кабина тренажера.
Фиг.14 - схема работы устройства по крену.
Тренажер для имитации движения транспортных средств состоит из кабины управления тренажером 3, размещенной в двух взаимосвязанных кольцевых структурах КС-1 1 и КС-2 2, размещенных в трех взаимно перпендикулярных прочно скрепленных металлических несущих фермах, две из которых вертикальные 11, перпендикулярные друг другу в вертикальной плоскости, перпендикулярны третьей горизонтальной 12, находящейся в горизонтальной плоскости, горизонтальная 12 и вертикальные 11 фермы скреплены с платформой 6 тренажера через четыре соединительных узла 8 с направляющими 4, на которых закреплены ролики перемещения 13, и четыре гидроцилиндра 5, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах 11, расположенных вертикально, размещена кольцевая структура КС-1 1, состоящая из двух колец, внутреннее неподвижное (относительно оси вращения) кольцо, имеющее двутавровый профиль 26, прочно скреплено с вертикальными фермами тренажера 11 по диаметру с помощью полуоси 14, установленной через подшипники 16 в верхний подшипниковый узел 10, и полуоси 15, установленной через подшипники 16 в нижний подшипниковый узел 9 основания, причем на нижней полуоси 15 расположен блок 17, который через привод 19 и блок 18 связан через редуктор 20 с электродвигателем Д3, приводящим во вращение всю конструкцию тренажера, внешнее подвижное кольцо 23 структуры КС-1 1, имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора 28, жестко закреплены ролики вращения 21, с помощью которых внешнее подвижное кольцо 23 подвижно скреплено с внутренним кольцом 26, для плавности движения внешнего кольца относительно внутреннего предусмотрены ролики 24, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца 23 П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля 26, расположенный на внешней стороне структуры КС-1 1 реверсивный электродвигатель Д1 через редуктор 20 соединен с планетарной системой передачи 30, состоящей из конических шестеренок 42, на волах которой жестко соединены барабаны 31, 32 с тросами Тр1, Тр2 с одной стороны и барабаны 33, 34 с тросами Тр3, Тр4 с другой стороны, троса Тр1, Тр2 проходят в диаметрально противоположном направлении к тросам Тр3, Тр4 по внешней поверхности кольца двутаврового профиля 26 через жестко закрепленные системы блоков направления 29 по жестко закрепленным роликам для прокладки тросов 22 и соединены с двумя симметричными сегментами 40 кольца П-образного профиля через натяжители тросов 39, образуя замкнутый тросо-блочный контур, обеспечивающий высокоскоростное перемещение тренажера по крену, движение тренажера по тангажу обеспечивается системой КС-2 2, аналогичной по строению системе КС-1 1 и расположенной внутри нее в плоскости, перпендикулярной плоскости системы КС-1, внутреннее неподвижное кольцо двутаврового профиля 26 системы КС-2 жестко скреплено с подвижным внешним кольцом П-образного профиля 23 системы КС-1 с полыми полуосями 27, на внутреннем кольце 26 системы КС-2 с внешней стороны расположен реверсивный двигатель Д2, через редуктор 20 соединенный с планетарной системой передачи 30, на волах которой жестко соединены барабаны 35, 36 с тросами Тр5, Тр6 с одной стороны и барабаны 37, 38 с тросами Тр7, Тр8 с другой стороны, троса Тр5, Тр6 проходят в диаметрально противоположном направлении к тросам Тр7, Тр8 по внешней поверхности кольца двутаврового профиля 26 системы КС-2 2 через жестко закрепленную систему блоков направления 29, по жестко закрепленным роликам для прокладки тросов 22 и соединены с двумя сегментами 40 кольца П-образного профиля 23 через натяжители тросов 39, образуя замкнутый тросо-блочный контур, обеспечивающий высокоскоростное перемещение тренажера по тангажу, система управления тренажером использует беспроводную связь Wi-Fi, для этого в кабине 3 тренажера, смонтированной внутри КС-2 при помощи крепежных отверстий 25, размещены: дисплей 41 - жестко закрепленный плазменный экран, виртуальный шлем или иная современная компьютеризированная система, предназначенная для вывода мультимедийного изображения и осуществления ввода - вывода сигналов через систему управления.
Техническим результатом использования изобретения является разработка принципиально новой кинематической системы, предусматривающей использование реверсивных двигателей с планетарной системой передачи в тросо-блочной системе, позволяющее повысить быстродействие вращения в заданной плоскости, расположение замкнутых контуров тросовой проводки в перпендикулярных плоскостях относительно друг друга позволяет совершать вращение по крену до 175° вправо, влево и по тангажу до 175° вверх, вниз, совершать вращение по крену и тангажу как раздельно, так и одновременно, что обеспечивает кабине тренажера возможность осуществлять сложные пространственные движения.
Учитывая возможность данного устройства вращаться неограниченно на углы более 360° в разные стороны и совершать при помощи гидроцилиндров возвратно-поступательные движения по вертикали на высоту 1,5 м, появляется реальная возможность имитации таких сложных пространственных движений, как вертикальный и плоский штопор, колокол, вертикальная бочка и так далее.
Образованный замкнутый тросо-блочный контур дает возможность движения кабины управления в разных плоскостях пространства, торможения или замедления движения в разных точках плоскости.
Заявляемый тренажер имеет восемь степеней свободы в отличие от прототипа (6).
Техническим результатом использования изобретения является разработка тренажера, обеспечивающего более эффективную имитацию экстремальных физических факторов, воздействующих на управляющего тренажером в реальном движении, за счет увеличения степеней свободы (8 вместо 6) и повышения их скоростных изменений, это позволяет использовать его для выработки навыков работы в условиях экстремальных перегрузок как для наземного, так и для летного транспорта, применять для реального обучения по выбранным профессиям, что приводит к большой экономии денежных средств, техники, топливно-энергетических ресурсов.
Заявляемое устройство промышленно применимо.
Совокупность указанных отличительных признаков позволяет создать тренажер нового класса - многофункциональный, с высокой приемистостью модуля по восьми степеням свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ТРЕНАЖЕР | 2009 |
|
RU2398284C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ АВИАЦИОННОГО ТРЕНАЖЕРА | 1985 |
|
RU1342302C |
| ТРЕНАЖЕР ПОКИДАНИЯ ТОНУЩЕГО ВЕРТОЛЕТА | 2017 |
|
RU2655570C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
| ИМИТАТОР АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1988 |
|
RU1535223C |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2263352C1 |
Изобретение относится к тренажеростроению и может быть использовано для создания тренажера для выработки навыков работы в условиях перегрузок. Устройство содержит первую кольцевую систему, вторую кольцевую систему, кабину тренажера, платформу, две кольцевые фермы, гидроцилиндры, направляющие для гидроцилиндров, полую верхнюю ось устройства, полую нижнюю ось устройства, верхний подшипниковый узел, нижний подшипниковый узел основания, подшипники, электродвигатель, редуктор, кольцо двутаврового профиля первой кольцевой системы, полуось, соединяющую первую кольцевую систему и вторую кольцевую систему, ролики для прокладки тросов, ролики вращения, трапециевидные сектора П-образного профиля, на которых закреплены ролики, ролик-компенсатор крутящих моментов. Также устройство содержит внешнее подвижное кольцо П-образного профиля первой и второй кольцевой систем, шаровые компенсаторы, расположенные по бокам двутаврового профиля, кожух первой и второй кольцевой систем, первый реверсивный электродвигатель, планетарную систему передач, первые барабаны с тросами, второй реверсивный электродвигатель, вторые барабаны с тросами, сегмент П-образного профиля, натяжитель тросов, блоки направления и дисплей. Технический результат заключается в увеличении степеней свободы тренажера и повышении угловой скорости в заданной плоскости. 14 ил.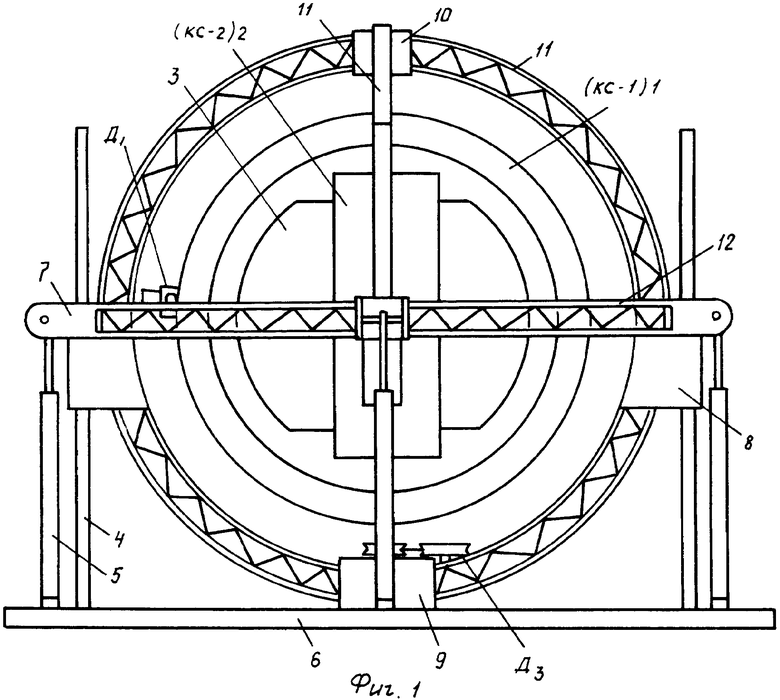
Тренажер для имитации движения транспортных средств, включающий кабину управления тренажером с системой ее подвижности по углам крена и тангажа, осуществляемой электродвигателями посредством трособлочных приводов, отличающийся тем, что кабина управления тренажером размещена в двух взаимосвязанных кольцевых структурах КС-1 и КС-2, размещенных в трех взаимно перпендикулярных прочно скрепленных кольцевых металлических несущих фермах, две из которых перпендикулярны друг другу в вертикальной плоскости, перпендикулярны третьей, находящейся в горизонтальной плоскости, горизонтальная и вертикальные фермы скреплены с платформой тренажера через четыре соединительных узла с направляющими, на которых закреплены ролики перемещения, и четыре гидроцилиндра, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах, расположенных вертикально, размещена кольцевая структура КС-1, состоящая из двух колец, внутреннего (неподвижного относительно оси вращения), имеющего двутавровый профиль, и прочно скрепленного с вертикальными фермами тренажера по диаметру с помощью полуосей, установленных в подшипниковых узлах, причем на нижней полуоси расположен блок, который через привод связан с блоком на редукторе реверсивного электродвигателя Д3, приводящим во вращение всю конструкцию тренажера, внешнее подвижное кольцо структуры КС-1, имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора, жестко закреплены ролики вращения, с помощью которых внешнее кольцо подвижно скреплено с внутренним кольцом, для плавности движения внешнего кольца относительно внутреннего предусмотрены ролики, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля, расположенный на внешней стороне структуры КС-1 реверсивный электродвигатель
Д1 через редуктор соединен с планетарной системой передачи, на валах которой жестко соединены барабаны с тросами определенной длины, проходящие в диаметрально противоположных направлениях по внешней поверхности кольца двутаврового профиля через жестко закрепленную систему блоков направления тросов, по жестко закрепленным роликам для прокладки тросов и соединенные с двумя симметричными сегментами кольца П-образного профиля через натяжители тросов, образуя замкнутый тросо-блочный контур, обеспечивающий высокоскоростное перемещение тренажера по крену, движение тренажера по тангажу обеспечивается системой КС-2, аналогичной по строению системе КС-1 и расположенной внутри нее в плоскости, перпендикулярной плоскости системы КС-1, внутреннее неподвижное кольцо двутаврового профиля системы КС-2 жестко скреплено с подвижным внешним кольцом П-образного профиля системы КС-1 с помощью полых полуосей, замкнутый трособлочный контур КС-2 с реверсивным двигателем Д2 обеспечивает высокоскоростное перемещение тренажера по тангажу, система управления тренажером использует беспроводную связь Wi-Fi, для этого в кабине тренажера размещены дисплей - жестко закрепленный плазменный экран, виртуальный шлем или иная современная компьютеризированная система, предназначенная для вывода мультимедийного изображения и осуществления ввода-вывода сигналов через систему управления.
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| Пилотажный стенд с подвижной кабиной | 1991 |
|
SU1798811A1 |
| СИСТЕМА ПОДВИЖНОСТИ ТРЕНАЖЕРА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
SU1828295A1 |
| Приспособление для очистки полотна бесконечного транспортера | 1937 |
|
SU55186A1 |

