Изобретение относится к авиационной технике, а именно к конструкции системы подвижности кабины пилотажных тренажеров летательного аппарата (ЛА), и может быть использовано для обучения и тренировки летного состава в условиях, максимально приближенных к реальным, имитирующим физические факторы полета: перегрузки, угловые ускорения и угловые перемещения.
Известна система подвижной кабины пилотажного тренажера (А.С. СССР 1798811, G 09 В 9/08 от 03.09.91, oп. бюлл. № 8, 1993), содержащая опору, жестко закрепленную на основании, консоль, шарнирно установленную на опоре, раму, установленную на конце консоли с возможностью поворота относительно горизонтальной оси, перпендикулярной продольной оси кабины, установленной на раме с возможностью поворота относительно продольной оси ЛА, и гидроцилиндры приводов угловых перемещений консоли, рамы и кабины.
Использование в известной системе подвижности гидроцилиндров приводов подвижных элементов имеет большую инерционность системы подвижности, а также ограничивает диапазон ускорений и угловых скоростей вращения кабины ЛА.
Кроме того, из-за несовпадения центра масс кабины и ее осей вращения возникают дополнительные моменты сил инерции, которые необходимо компенсировать дополнительными устройствами.
Использование в известной системе подвижности кабины консоли (механизма обеспечения подвижности) с приводом ее перемещений и двигателями, установленными на подвижных частях, значительно усложняет конструкцию системы в целом, повышает ее инерционность и вызывает необходимость установки в основании более мощного двигателя, что повышает энергоемкость эксплуатации тренажера в целом, а также вызывает необходимость проведения балансировки подвижных частей, что значительно увеличивает общий вес конструкции.
Наиболее близким к известному является система подвижности кабины пилотажного тренажера ЛА, содержащая вилкообразное основание с установленными в нем с возможностью вращения по углам тангажа в вертикальной плоскости вокруг горизонтальной оси поддерживающего корпуса, типа капсулы, посредством жестко закрепленных на нем полуосей, кинематически связанных с приводом электродвигателя, входящих в симметрично расположенные на вертикальных составляющих основания подшипниковые узлы, и закрепленную на поддерживающем корпусе в механизме обеспечения подвижности, выполненном в виде полой оси, установленной в подшипниковых узлах, кинематически связанной с приводом электродвигателя, силовую платформу с установленной на ней кабиной с возможностью вращения по углам крена в вертикальной плоскости, перпендикулярной продольной оси ЛА (патент РФ № 2037209, G 09 В 9/08 от 14.07.92, oп. бюлл. №16, 1995 - прототип).
Наличие электрогидравлических приводов, включающих в себя в том числе зубчатые передающие элементы, гидравлических шлангов высокого давления, соединяющих приводы кабины и капсулы, не только значительно усложняет конструкцию известной системы подвижности кабины, но и увеличивает ее суммарную массу и инерционность подвижных элементов, снижает скорость угловых перемещений.
Кроме того, расположение системы подвижности по крену, включающую электропневмоприводы с электродвигателем внутри капсулы, не только значительно усложняет и утяжеляет конструкцию, но и требует дополнительной системы балансировки для снятия действующих на кабину в переносном движении дополнительных моментов сил инерции, что снижает быстродействие системы подвижности, а также удорожает стоимость тренажера в целом, в том числе и в процессе его эксплуатации.
Применение сложных приводов и использование для вращения по тангажу и крену различных по конструкции механизмов обеспечения подвижности, а также расположение одного из двигателей на подвижных элементах, вызывает необходимость установки в основании более мощного двигателя, что увеличивает габариты тренажера в целом и повышает его энергоемкость, требует изготовления специальных фундаментов под его силовые механизмы.
Задачей технического решения является обеспечение быстродействия, упрощение и удешевление конструкции и эксплуатации системы подвижности кабины пилотажного тренажера ЛА, путем снижения веса и габаритов системы и тренажера в целом, обеспечения возможности применения электродвигателей малой мощности.
Поставленная задача достигается тем, что в известном устройстве системы подвижности кабины пилотажного тренажера ЛА, содержащей вилкообразное основание с установленной в нем рамой с возможностью вращения по углам тангажа в вертикальной плоскости вокруг горизонтальной оси, перпендикулярной плоскости симметрии ЛА поддерживающего корпуса посредством жестко закрепленных на нем полуосей, входящих в симметрично расположенные на вертикальных составляющих основания подшипниковые узлы, и закрепленную на поддерживающем корпусе в механизме обеспечения подвижности платформу с установленной на ней кабиной с возможностью вращения по углам вертикальной плоскости, перпендикулярной продольной оси ЛА, электродвигатели угловых перемещений кабины по тангажу и крену, поддерживающий корпус выполнен в виде вилкообразной рамы, а приводы вращения выполнены в виде тросовой проводки, связывающей приводные по тангажу и крену электродвигатели соответственно с рамой и платформой, при этом проводка проходит по направляющим роликам и симметрично расположенным сегментам, жестко закрепленным соответственно на раме и платформе в плоскости их вращения.
Механизм обеспечения подвижности по крену выполнен в виде полуосей, вращающихся в подшипниковых узлах и установленных симметрично оси вращения. Приводные электродвигатели установлены в основании на неподвижной раме, а их приводы, образующие замкнутые контуры, соответственно с рамой и платформой, расположены в двух перпендикулярных плоскостях.
Привод вращения по крену выполнен в виде наружного и внутреннего контура тросовой проводки, соединенных между собой компенсатором крутящих моментов.
Система подвижности снабжена аварийным гидравлическим тормозом.
Выполнение поддерживающего корпуса подвижной системы кабины, обеспечивающей вращение по тангажу в виде вилкообразной рамы, позволяет разместить механизм обеспечения подвижности на вертикальных составляющих рамы и основания, упростить его конструкцию и уменьшить габариты стенда в целом.
Применение в качестве привода тросовой проводки позволяет увеличить быстродействие системы подвижности кабины ЛА по сравнению с зубчатыми и гидроэлектрическими приводами, упростить конструкцию приводов, что приводит к снижению веса и габаритов тренажера в целом.
Выполнение кинематической связи между приводными по тангажу и крену электродвигателями и непосредственно рамой и платформой в плоскости их вращения позволяет значительно упростить приводные механизмы, установить электродвигатели на неподвижном основании, этим самым значительно облегчить вес системы и тренажера в целом и снизить потребление энергии во время его эксплуатации, что позволяет применить менее мощные и простые в эксплуатации электродвигатели.
Выполнение механизма обеспечения подвижности по крену идентичным механизму обеспечения подвижности по тангажу, в виде полуосей, вращающихся в подшипниковых узлах и установленных симметрично относительно оси вращения, позволяет обеспечить применение тросовой проводки в качестве приводов, так же как и выполнение направляющих сегментов и роликов.
Снабжение трособлочной системы натяжителями позволяет повысить быстродействие во время совершения вращения и связанного с ним наматывания и разматывания ветвей тросовой проводки замкнутого контура, а также увеличить срок службы системы подвижности кабины ЛА. Расположение замкнутых контуров тросовой проводки в перпендикулярных плоскостях позволяет совершать вращения по тангажу и крену как раздельно, так и одновременно, что обеспечивает кабине тренажа возможность осуществлять сложные пространственные движения.
Снабжение привода по крену компенсатором крутящих моментов способствует бесперебойному и долговечному функционированию тросовой проводки.
Наличие аварийного тормоза обеспечивает безопасную эксплуатацию системы подвижности кабины и всего тренажера в целом.
Предложенное устройство поясняется чертежами.
Фиг.1 - общий вид подвижного стенда пилотажного тренажера ЛА.
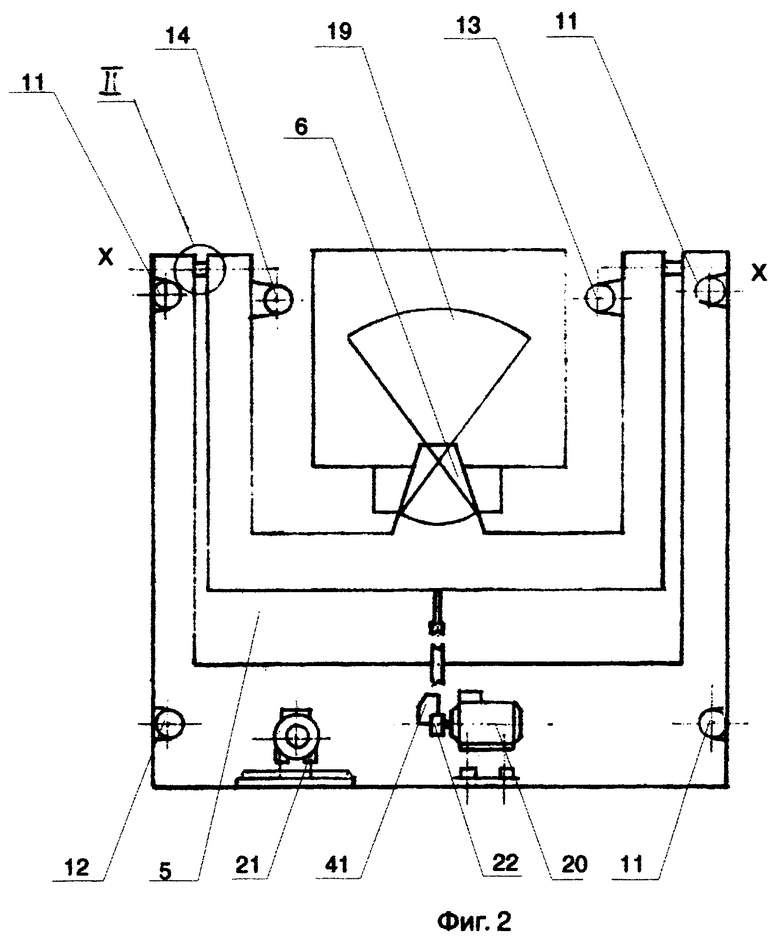
Фиг.2 - вид сбоку на фиг.1.
Фиг.3 - механизм обеспечения подвижности по тангажу.
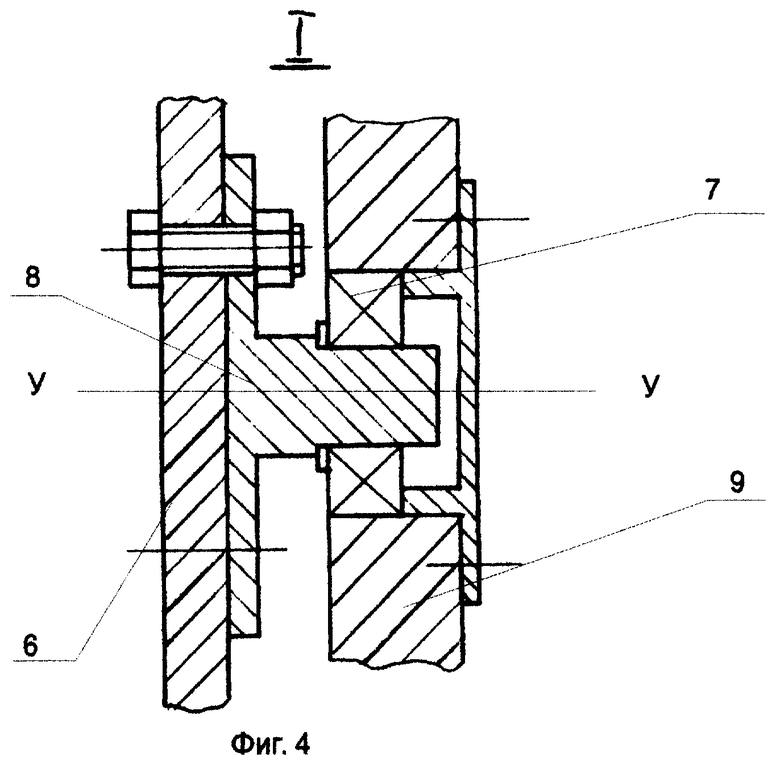
Фиг.4 - механизм обеспечения подвижности по крену.
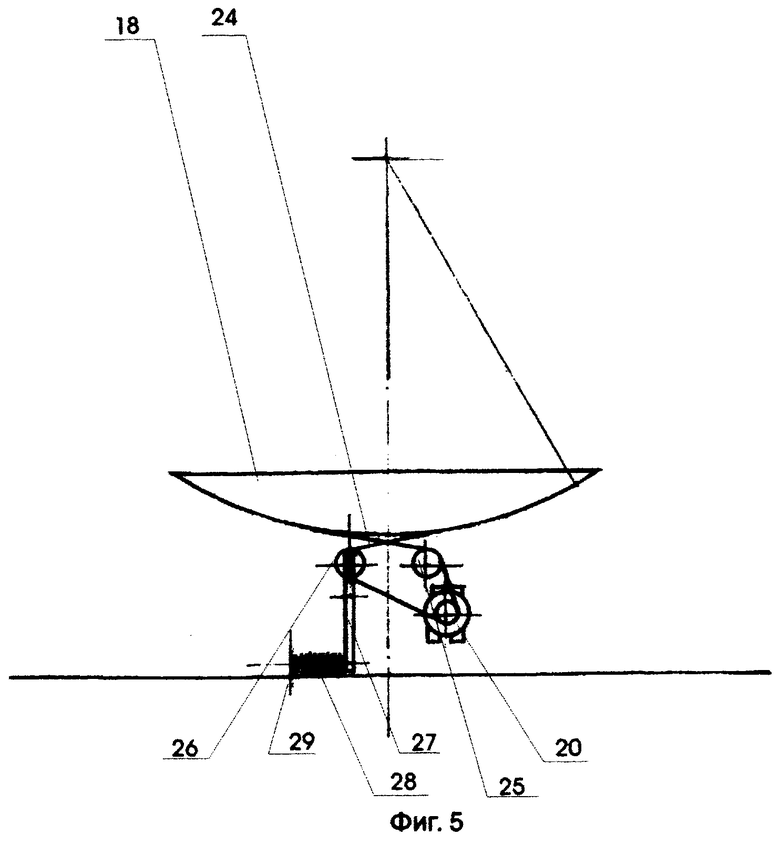
Фиг.5 - схема привода вращения рамы по тангажу.
Фиг.6 - схема привода вращения платформы по крену.
Фиг.7 - компенсатор крутящего момента.
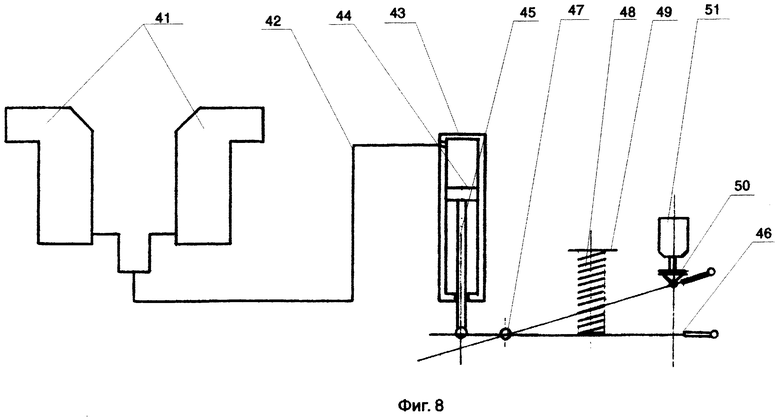
Фиг.8 - гидравлический аварийный тормоз.
Система подвижности кабины пилотажного тренажера летательного аппарата содержит вилкообразное основание 1, выполненное в виде трубчатого прямоугольного корпуса с поперечными и продольными составляющими и вертикальных составляющих стоек 2 (см. фиг.1, 2), на которых жестко закреплены горизонтальные полуоси 3, установленные в подшипниковых узлах 4 на раме 5 (фиг.3) и образующие ось вращения Х-Х.
Рама 5 выполнена в виде вильчатой пространственной конструкции из трубчатых продольных и поперечных элементов. В центральной части рамы 5, в вертикальной плоскости, перпендикулярной продольной оси ЛА, симметрично выполнены стойки 6 для закрепления в подшипниковых узлах 7 (фиг.4) горизонтальных полуосей 8, образующих ось вращения Y-Y платформы 9 крепления кабины 10. Съемная кабина 10 закреплена на платформе 9 посредством разъемных крепежных соединений (не показано), что обеспечивает быструю переналадку системы подвижности на различные типы ЛА.
На стойках 2 основания 1 жестко закреплены ролики 11 и подвижно-натяжные ролики 12 привода платформы 9, а на вертикальной составляющей вильчатой рамы 5 жестко закреплены ролики 13 и подвижно-натяжные ролики 14. При этом оси роликов 12, 14 жестко соединены с рычагами 15 натяжителей 16, выполненных в форме пружин, жестко закрепленных на опорах 17 (см. фиг.5, 6).
На нижней части рамы 5 заодно с ней выполнен направляющий сегмент 18, симметрично расположенный относительно плоскости, проходящей через ось Х-Х в плоскости вращения рамы по тангажу, а на стойках 6 рамы 5 в плоскости вращения платформы 9 симметрично плоскости, проходящей через ось Y-Y, жестко установлен направляющий сегмент 19.
На неподвижном основании 1 установлены двигатель 20 привода рамы 5 по тангажу и двигатель 21 привода платформы 9 по крену. На приводных валах двигателей 20, 21 жестко закреплены барабаны 22, 23.
Кинематическая связь между двигателем 20 и рамой 5 осуществляют тросовой проводкой 24, проходящей через барабан 22, жестко закрепленные на основании неподвижные ролики 25 и подвижно установленные натяжные ролики 26, ось которых жестко соединена с рычагом 27 натяжителя 28, выполненного в форме пружины, закрепленной на основании 29, и далее по направляющему сегменту 18 концы троса 24 закрепляют жестко в углах сегмента 18. При этом правая ветвь проводки 24 закреплена в левом углу сегмента 18, а левая ветвь - в правом углу. Таким образом, тросовая проводка 24 образует замкнутый контур от барабана 22 до рамы 5 в вертикальной плоскости и обеспечивает вращение рамы 5 по тангажу вокруг полуоси 3 в подшипниках 7, установленных в основании 1.
Кинематическая связь между двигателем 21 и платформой 9 осуществляют тросовой проводкой 30, проходящей через барабан 23, жестко закрепленные на основании ролики 11, натяжные ролики 12 и жестко закрепленные на раме 5 ролики 13, и подвижные ролики 14 и направляющий сегмент 19.
Тросовая проводка образует внешний 30 и внутренний контур 31, соединенные между собой компенсатором 32 крутящих моментов, при этом внутренний контур 31 проводки проходит по направляющим подвижного 14 и неподвижного 13 роликов.
Двухконтурная тросовая проводка 30, 31 выполнена в вертикальной плоскости, перпендикулярной плоскости выполнения проводки 24, и обеспечивает вращение платформы 9 с кабиной 10 по крену.
Для уравновешивания влияния крутящего момента, приводящего к скручиванию троса 30, над сегментом 19 привода платформы 9 установлен компенсатор 32.
Компенсатор 32 (см.фиг.6) содержит внутренний 33 и наружный 34 корпуса, внутри которых в подшипниках 35 поступательно перемещается между роликами 13 и 14 трос 30. Болты 36 удерживают трос 30 от крутящих перемещений. А гайка 37 закрепляет подшипник 35 в компенсаторе 32.
В пластинах 38, 39, соединенных между собой посредством стяжного болта 40, жестко закреплен трос 31 привода платформы 9.
На основании 1 установлены тормоза 41 аварийной остановки системы подвижности тренажера.
Тормоза 41 (фиг.8) гидравлического типа соединены посредством трубопровода 42 с тормозным гидроцилиндром 43, внутри которого перемещается поршень 44 со штоком 45.
Шток 45 соединен с рычагом 46, закрепленным на оси 47 с установленной на нем пружиной 48, имеющей опору 49. При этом конец рычага 46 имеет возможность соединения с контактной площадкой 50 электромагнита 51. Механическое растормаживание механизма осуществляется рычагом 46.
Устройство работает следующим образом.
Пилот размещается в кресле 52 кабины 10 как в кабине реального ЛА. Режим работы, в зависимости от решаемой задачи, задается пилотом посредством ручки управления ЛА 53, отклонения которой и определяют параметры углового положения кабины 10 по тангажу и крену. Система подвижности кабины является составной частью пилотажного тренажера ЛА и взаимодействует с автоматизированной системой управления пилотажного тренажера.
В зависимости от поворота ручки управления 53 преобразованная информация поступает на датчики (не показано), задающие соответствующий режим работы приводным электродвигателям 20, 21, и воспроизводится системой подвижности кабины пилотажного тренажера, при этом сама кабина 10 занимает соответствующее угловое положение по тангажу и крену. Отклонения кабины 10 по тангажу и крену может происходить по команде автоматизированной системы управления пилотажного тренажера, согласно заданной программе.
Система подвижности по тангажу срабатывает при поступлении сигнала на электродвигатель 20, который приводит в действие барабан 22. При повороте барабана 22 в ту или иную сторону на заданный угол происходит наматывание одной ветви тросовой проводки 24 и разматывание другой. Концы тросовой проводки 24 жестко закреплены в углах сегмента 18, жестко закрепленного на раме 5. Натяжной ролик 26 обеспечивает быстродействие системы, способствуя за счет его подпружинивания посредством рычага 27 быстрому наматыванию и соответствующей ветви тросовой проводки 24. Трос 24, закрепленный в направляющем сегменте 18, поворачивает раму 5 вокруг горизонтальной оси Y-Y в вертикальной плоскости в подшипниках 3 на полуосях 4, установленных в основании 1. Заодно с рамой 5 происходит поворот по углам тангажа и платформы 9 с закрепленной на ней кабиной 10.
При поступлении управляющего сигнала, заданного движением ручки управления 53 на приводной по крену двигатель 21, соответственно происходит заданный поворот барабана 23, который, поворачиваясь, наматывает одну ветвь тросовой проводки 30 и разматывает вторую, поскольку концы тросовой проводки жестко закреплены в углах направляющего сегмента 19, при наматывании той или иной ветви соответственно происходит поворот платформы 9 с кабиной 10. Быстродействие системы привода по крену обеспечивается за счет отсутствия люфтов и зазоров, присущих сложным кинематическим приводам, например, зубчатым передачам и за счет предложенной в изобретении системы натяжения тросовых проводок 24, 30.
Поскольку электродвигатели 20, 21 установлены на неподвижном основании 1, тросовая проводка 24, 30, кинематически связывающая их с рамой 5 и платформой 9, проходит в вертикальной плоскости.
При этом тросовая проводка 24 совершает возвратно-поступательное движение.
Тросовая проводка 30 проходит по роликам 11, 12, закрепленным на основании 1, роликам 13, 14, закрепленным на раме 5, и направляющему сегменту 19, закрепленному на платформе 9, и образует наружный 30 и внутренний 31 контуры проводки. Наружный контур проводки 30 проходит в вертикальной плоскости, перпендикулярной плоскости расположения проводки 24.
Наружный 30 и внутренний 31 контуры проводки привода по крену расположены в статическом состоянии в одной плоскости. Для снятия крутящих моментов наружного контура 30 установлен компенсатор 32 и внутренний контур привода 31. Проходящий внутри компенсатора 32 трос 31 внутреннего контура жестко закреплен пластинами 38, 39, при помощи стяжных болтов 40, при этом поступательно перемещается весь компенсатор 32 между роликами 13 и 14. Установленный между внутренним 34 и наружным 35 корпусами подшипник 36 обеспечивает колебательное вращение троса 31 с пластинами 38, 39 вокруг троса 30, что и обеспечивает компенсацию крутящих моментов. Наружный контур тросовой проводки 30 совершает только поступательные движения.
Безопасность системы обеспечивается гидравлическим аварийным тормозом 41, который может срабатывать от управляющего сигнала из кабины 10 или, в ручном режиме, при нажатии рычага 46 механического растормаживания. При поступлении сигнала или поворота рычага 46 происходит сжатие пружины 48, поворот вокруг оси 47 и воздействие рычага 46 на шток 45 гидроцилиндра 43. В цилиндре 43 создается давление гидрожидкости, которое воздействуя на тормозные цилиндры 41, приводит их в движение, происходит торможение и остановка системы подвижности.
Изобретение может применяться в первую очередь для обучения летного состава навыкам пилотирования ЛА, тренировки пилотов в условиях, максимально приближенных к реальным, с созданием ускорений и угловых перемещений кабины 10 тренажера, имитирующих изменение пространственного положения ЛА.
Кроме того, изобретение может использоваться для медицинских исследований, а также в различных атракционах.
Согласно предложенной полезной модели изготовлен опытный образец подвижной системы кабины ЛА, смонтирован и испытан в составе пилотажного тренажера из выпускаемых в отечественной промышленности узлов, деталей и материалов. Использование предложенной полезной модели позволяет обеспечить эффективную имитацию физических факторов, воздействующих на пилота в реальном полете при минимальных затратах на изготовление и эксплуатацию системы подвижности кабины пилотажного тренажера ЛА.
В таблице 1 приведены параметры, полученные при испытании подвижной системы пилотажного тренажера, согласно предложенному изобретению и при испытании аналога подвижной системы комплексной тренажерной системы (КТС), разработанной НПО "ЭРА" г.Пенза.
Установка двигателей на основании позволяет значительно снизить вес подвижных частей, а применение в качестве приводов тросовой проводки не только упрощает конструкцию системы подвижности кабины пилотажного тренажера в целом, но и позволяет повысить быстродействие и снизить габариты тренажера, полезная площадь которого составляет примерно 9 м, а высота не превышает 2,5 м.
Подвижную систему кабины ЛА предполагается применять в составе пилотажных тренажеров в предполетной тренировке и обучении летного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2359334C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2263352C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| УНИВЕРСАЛЬНЫЙ ТРЕНАЖЕР | 2009 |
|
RU2398284C1 |
| Пилотажный стенд с подвижной кабиной | 1991 |
|
SU1798811A1 |
| КРЕСЛО ПИЛОТАЖНОГО ТРЕНАЖЕРА С ИМИТАТОРАМИ ВИБРАЦИЙ И ШУМА | 2002 |
|
RU2249253C2 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| ПРИБОРНАЯ ДОСКА КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА | 2002 |
|
RU2267815C2 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |



Изобретение относится к авиационной технике и может быть использовано для обучения и тренировки летного состава. Система содержит вилкообразное основание с установленным в нем поддерживающим корпусом, закрепленную на поддерживающем корпусе платформу с установленной на ней кабиной, электродвигатели с приводами угловых перемещений кабины. Поддерживающий корпус выполнен в виде вилкообразной рамы с возможностью вращения по углам тангажа. Платформа выполнена с возможностью вращения по углам крена. При этом приводы вращения выполнены в виде тросовой проводки, связывающей приводные по тангажу и крену электродвигатели с рамой и платформой. Изобретение обеспечивает быстродействие и упрощение конструкции и эксплуатации системы путем снижения веса и габаритов системы и тренажера в целом. 5 з.п. ф-лы, 8 ил., 1 табл.

| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| СИСТЕМА ПОДВИЖНОСТИ ТРЕНАЖЕРА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
SU1828295A1 |
| Пилотажный стенд с подвижной кабиной | 1991 |
|
SU1798811A1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ДВУМЯ ПЛАСТАМИ | 2011 |
|
RU2485292C2 |

