Изобретение относится к области учебно-тренировочного оборудования для выработки навыков работы в условиях перегрузок, а также в качестве развлекательных устройств.
Известен тренажер для имитации движения транспортных средств, патент РФ №2359334 - прототип.
Данное устройство представляет собою тренажер, включающий кабину управления тренажером с системой ее подвижности по углам крена и тангажа, осуществляемую электродвигателями посредством тросовых приводов, при этом кабина управления тренажером размещена в двух взаимосвязанных кольцевых структурах (КC-1)1 и (КС-2)2, размещенных в трех взаимно перпендикулярных прочно скрепленных кольцевых металлических несущих фермах, две из которых перпендикулярны друг другу в вертикальной плоскости, перпендикулярны третьей, находящейся в горизонтальной плоскости, горизонтальная и вертикальные фермы скреплены с платформой тренажера через четыре соединительных узла с направляющими, на которых закреплены ролики перемещения, и четыре гидроцилиндра, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах, расположенных вертикально, размещена кольцевая структура (КС-1)1, состоящая из двух колец, внутреннего (неподвижного относительно оси вращения), имеющего двутавровый профиль, и прочно скрепленного с вертикальными фермами тренажера по диаметру с помощью полуосей, установленных в подшипниковых узлах, причем на нижней полуоси расположен блок, который через привод связан с блоком на редукторе реверсивного электродвигателя Д3, приводящим во вращение всю конструкцию тренажера, внешнее подвижное кольцо структуры (КС-1)1, имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора, жестко закреплены ролики вращения, с помощью которых внешнее кольцо подвижно скреплено с внутренним кольцом, для плавности движения внешнего кольца относительно внутреннего предусмотрены ролики, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля, расположенный на внешней стороне структуры (КС-1)1 реверсивный электродвигатель Д1 через редуктор соединен с планетарной системой передачи, на валах которой жестко соединены барабаны с тросами определенной длины, проходящие в диаметрально противоположных направлениях по внешней поверхности кольца двутаврового профиля через жестко закрепленную систему блоков направления тросов, по жестко закрепленным роликам для прокладки тросов и соединенные с двумя симметричными сегментами кольца П-образного профиля через натяжители тросов, образуя замкнутый трособлочный контур, обеспечивающий высокоскоростное перемещение тренажера по крену, движение тренажера по тангажу обеспечивается системой (КС-2)2, аналогичной по строению системе (КС-1)1 и расположенной внутри нее в плоскости, перпендикулярной плоскости системы (КС-1)1, внутреннее неподвижное кольцо двутаврового профиля системы (КС-2)2 жестко скреплено с подвижным внешним кольцом П-образного профиля системы (КC-1)1 с помощью полых полуосей, замкнутый трособлочный контур (КС-2)2 с реверсивным электродвигателем Д2 обеспечивает высокоскоростное перемещение тренажера по тангажу, система управления тренажером использует беспроводную связь Wi-Fi, для этого в кабине тренажера размещены: дисплей - жестко закрепленный плазменный экран, виртуальный шлем или иная современная компьютеризированная система, предназначенная для вывода мультимедийного изображения и осуществления ввода-вывода сигналов через систему управления.
Недостатком указанного устройства является ограничение возвратно-поступательного движения систем (КС-1)1 и (КС-2)2 за счет тросового привода движения этих систем, которое ограничено определенной длиной участков тросов, обеспечивающих это движение, что исключает многократное вращение кабины тренажера по углам крена и тангажа.
Техническим результатом использования изобретения является разработка принципиально новой независимой кинематической схемы, позволяющей не ограничивать свободное вращение подвижных колец структур (КC-1)1 и (КС-2)2, обеспечивая этим неограниченное вращение кабины тренажера по крену и тангажу, сохраняя восемь степеней свободы и повышенные скоростные параметры.
Поставленная задача решается тем, что универсальный тренажер, включающий кабину управления тренажером с системой ее подвижности по углам крена и тангажа, размещенную в двух взаимосвязанных кольцевых структурах (КC-1)1 и (КС-2)2, размещенных в трех взаимно перпендикулярных прочно скрепленных кольцевых металлических несущих фермах, две из которых перпендикулярны друг другу в вертикальной плоскости, перпендикулярны третьей, находящейся в горизонтальной плоскости, горизонтальная и вертикальные фермы скреплены с платформой тренажера через четыре соединительных узла с направляющими, на которых закреплены ролики перемещения, и четыре гидроцилиндра, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах, расположенных вертикально, размещена кольцевая структура (КС-1)1, состоящая из двух колец, внутреннего (неподвижного относительно оси вращения), имеющего двутавровый профиль, и прочно скрепленного с вертикальными фермами тренажера по диаметру с помощью полуосей, установленных в подшипниковых узлах, причем на нижней полуоси расположен блок, который через привод связан с блоком на редукторе реверсивного электродвигателя Д3, приводящим во вращение всю конструкцию тренажера, внешнее подвижное кольцо структуры (КC-1)1, имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора, жестко закреплены ролики вращения, с помощью которых внешнее кольцо подвижно скреплено с внутренним кольцом, для плавности движения внешнего кольца относительно внутреннего предусмотрены ролики, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля, что обеспечивает движение кабины тренажера по крену; согласно изобретению движение кабины тренажера по тангажу обеспечивается системой (КС-2)2, аналогичной по строению системе (КC-1)1 и расположенной внутри нее в плоскости, перпендикулярной плоскости системы (КС-1)1, внутреннее неподвижное кольцо двутаврового профиля системы (КС-2)2 жестко скреплено с подвижным внешним кольцом П-образного профиля системы (КС-1)1 с помощью полых полуосей, система управления тренажером использует беспроводную связь Wi-Fi, для этого в кабине тренажера размещены: дисплей - жестко закрепленный плазменный экран, виртуальный шлем или иная современная компьютеризированная система, предназначенная для вывода мультимедийного изображения и осуществления ввода-вывода сигналов через систему управления.
Согласно изобретению тросовые приводы подвижности систем (KC-1)1 и (КС-2)2 заменены зубчато-колесными механизмами передвижения, закрепленными на подвижных кольцах систем (КС-1)1 и (КС-2)2, состоящими из реверсивного электродвигателя (Д1, Д2), редуктора, карданного вала, соединяющего редуктор электродвигателя с коническим симметричным межколесным дифференциалом, крутящий момент которого распределяется в равных частях между полностью разгруженными полуосями, проходящими через подшипниковые муфты крепления; на полуосях симметрично относительно друг друга на равных расстояниях жестко закреплены два зубчатых колеса, которые, как и дифференциал, располагаются в прорезях поверхности внешнего подвижного кольца систем (КC-1)1 и (КС-2)2, зубчатые колеса механизма передвижения наружными зубьями входят в постоянное зацепление с перфорированными отверстиями, расположенными на всей поверхности внутреннего (неподвижного относительно оси вращения) кольца (КС-1)1, (КС-2)2 симметрично друг другу на равноудаленном расстоянии. Свободное возвратно-поступательное движение кабины тренажера по крену осуществляется системой (КC-1)1, на внешнем подвижном кольце которой закреплен зубчато-колесный механизм, зубья которого входят в зацепление с перфорированными отверстиями, расположенными на поверхности внутреннего неподвижного кольца по его образующим. Свободное возвратно-поступательное движение кабины тренажера по тангажу осуществляется системой (КС-2)2, на внешнем подвижном кольце которой закреплен зубчато-колесный механизм, аналогичный механизму, используемому в системе (КС-1)1, зубья механизма входят в зацепление с перфорированными отверстиями неподвижного кольца, вращая возвратно-поступательно это кольцо без ограничений.
Фиг.1 - общий вид устройства спереди.
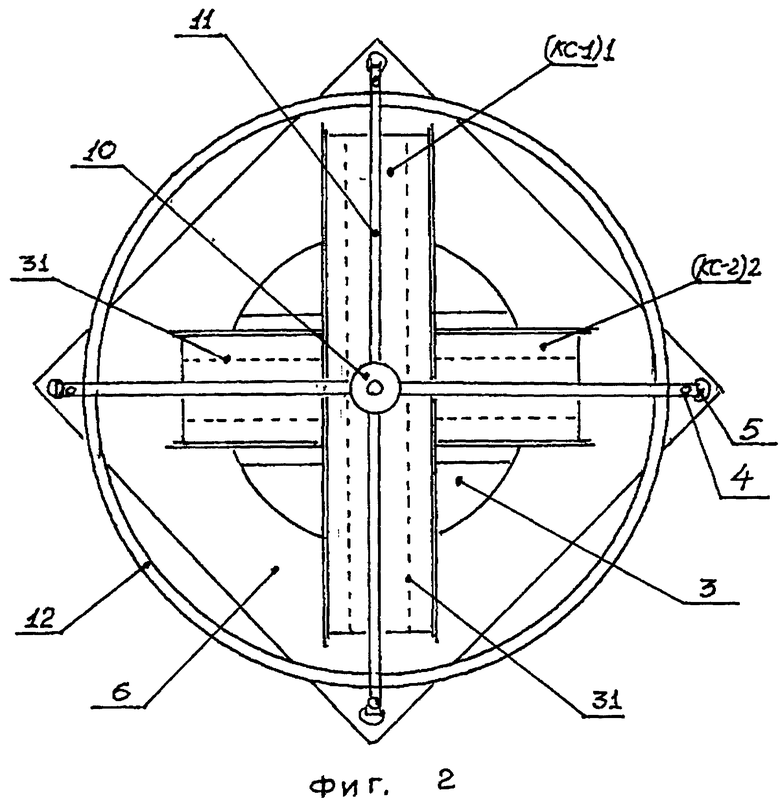
Фиг.2 - общий вид устройства сверху.
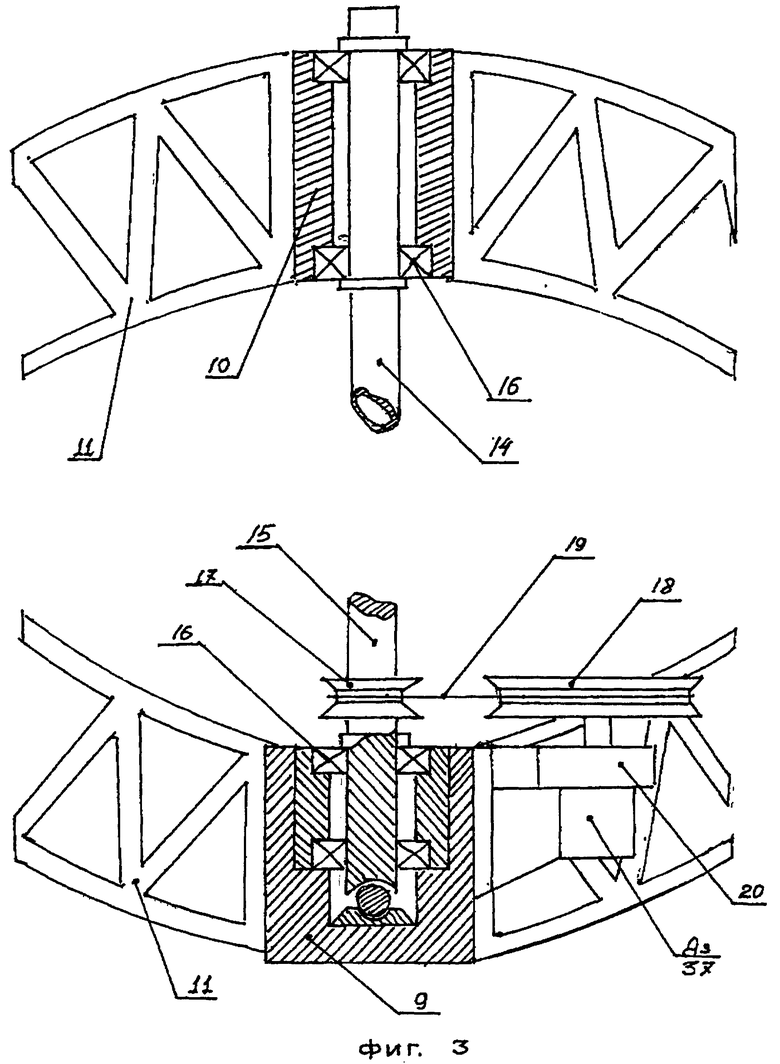
Фиг.3 - верхний и нижний соединительные подшипниковые узлы с электродвигателем.
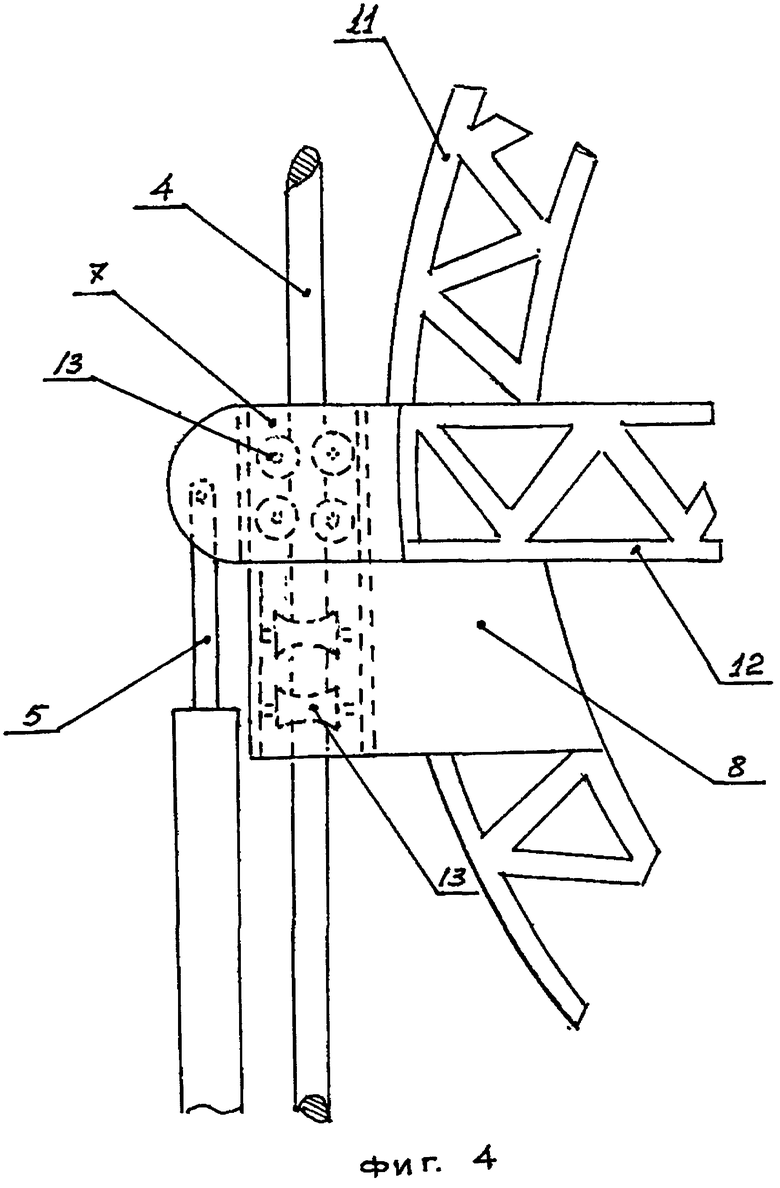
Фиг.4 - соединительный узел, гидравлический цилиндр и направляющая с роликами перемещения.
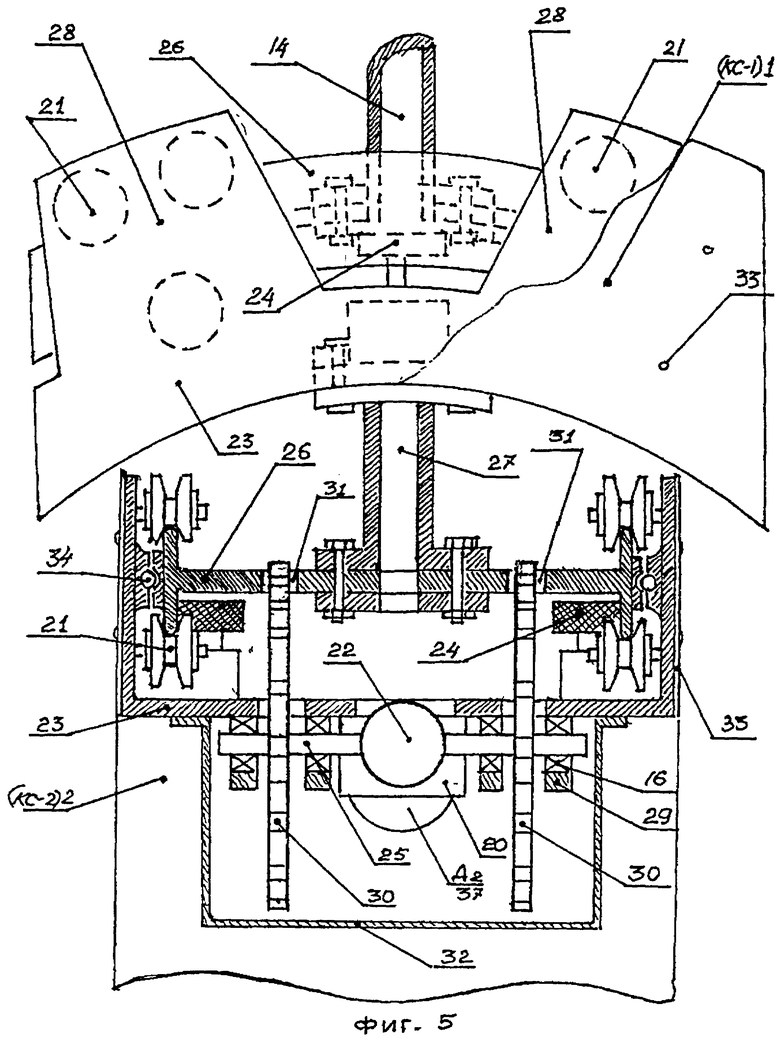
Фиг.5 - соединение системы (КC-1)1 и (КС-2)2, а также соединение внутреннего кольца (КС-2)2 с внешним подвижным кольцом (КС-2)2, на котором расположен жестко закрепленный зубчато-колесный механизм передвижения.
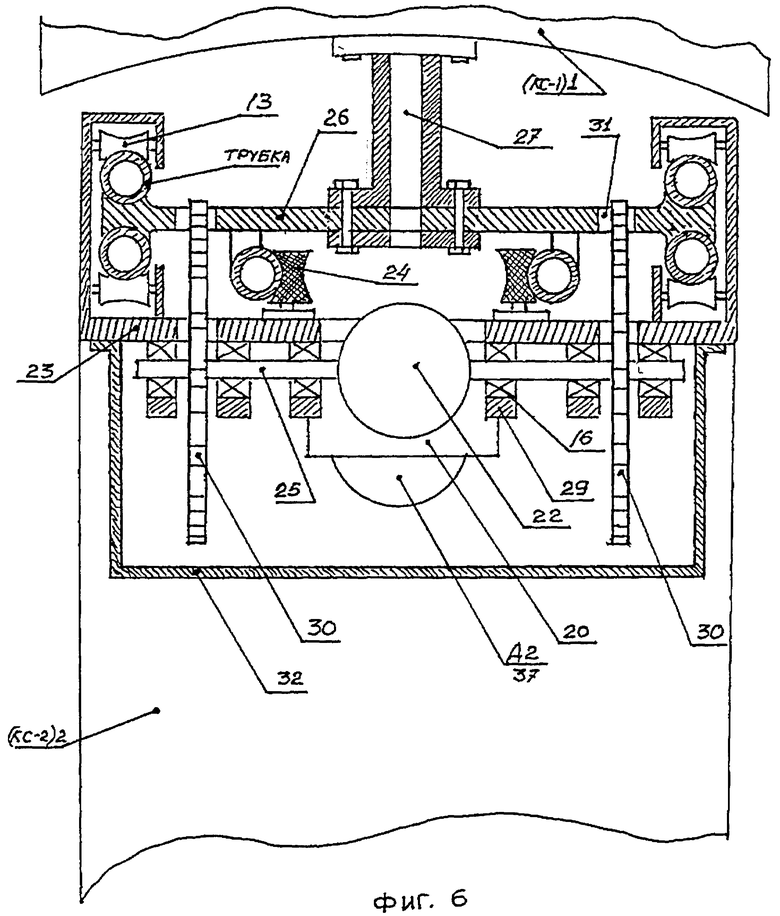
Фиг.6 - возможное соединение внутреннего кольца (КС-2)2, выполненного из кольцевых трубок, с внешним кольцом (КС-2)2.
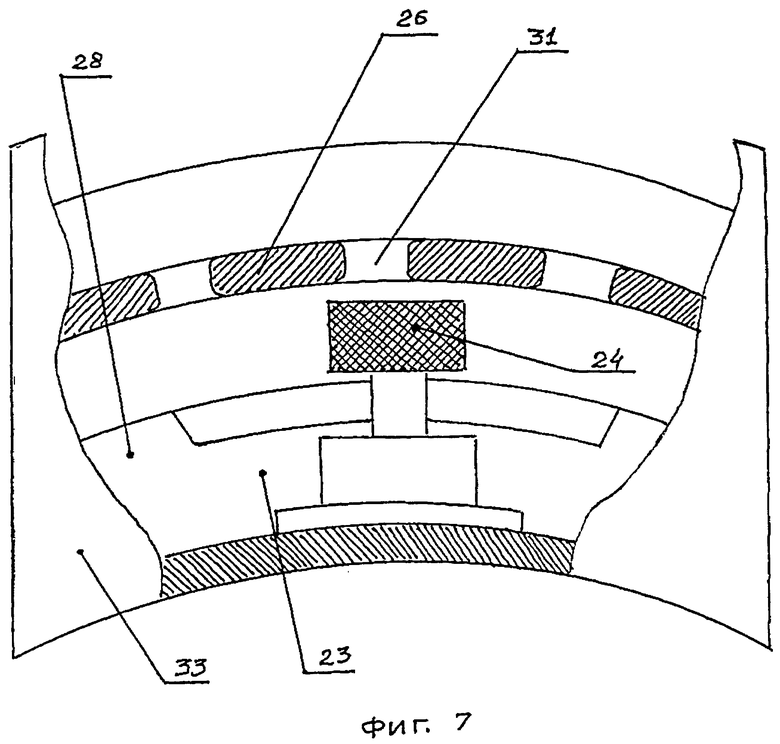
Фиг.7 - роликовый компенсатор крутящих моментов и перфорационные отверстия.
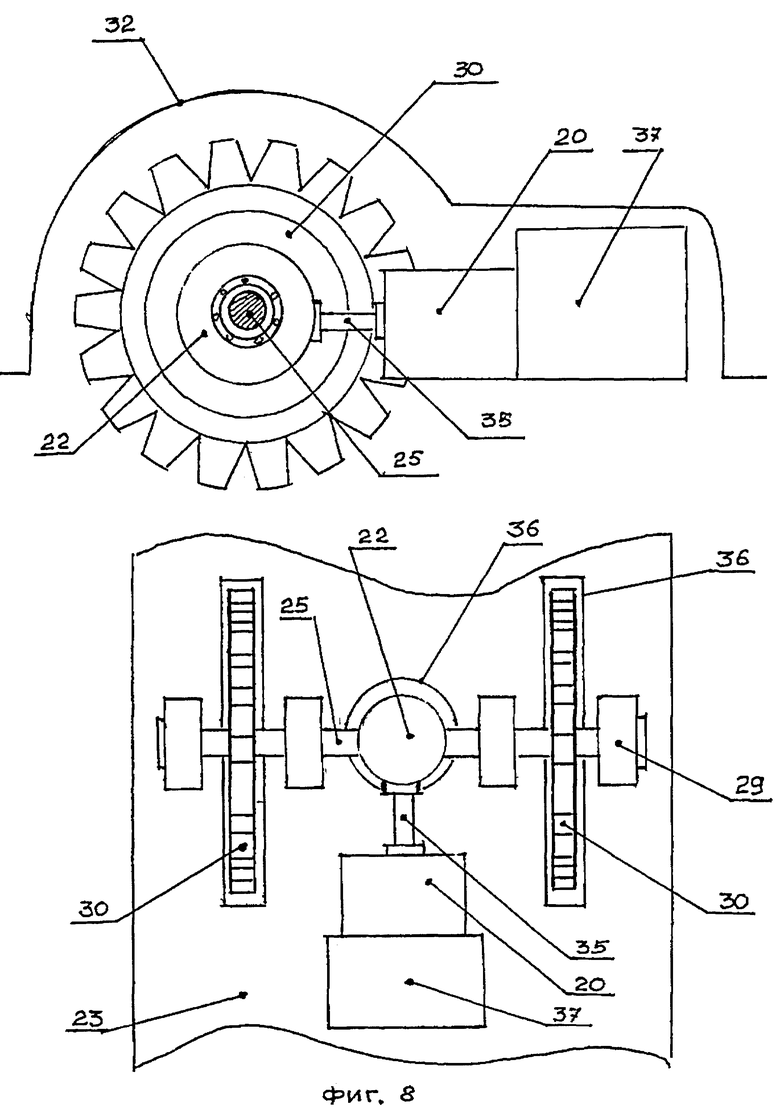
Фиг.8 - зубчато-колесный механизм передвижения.
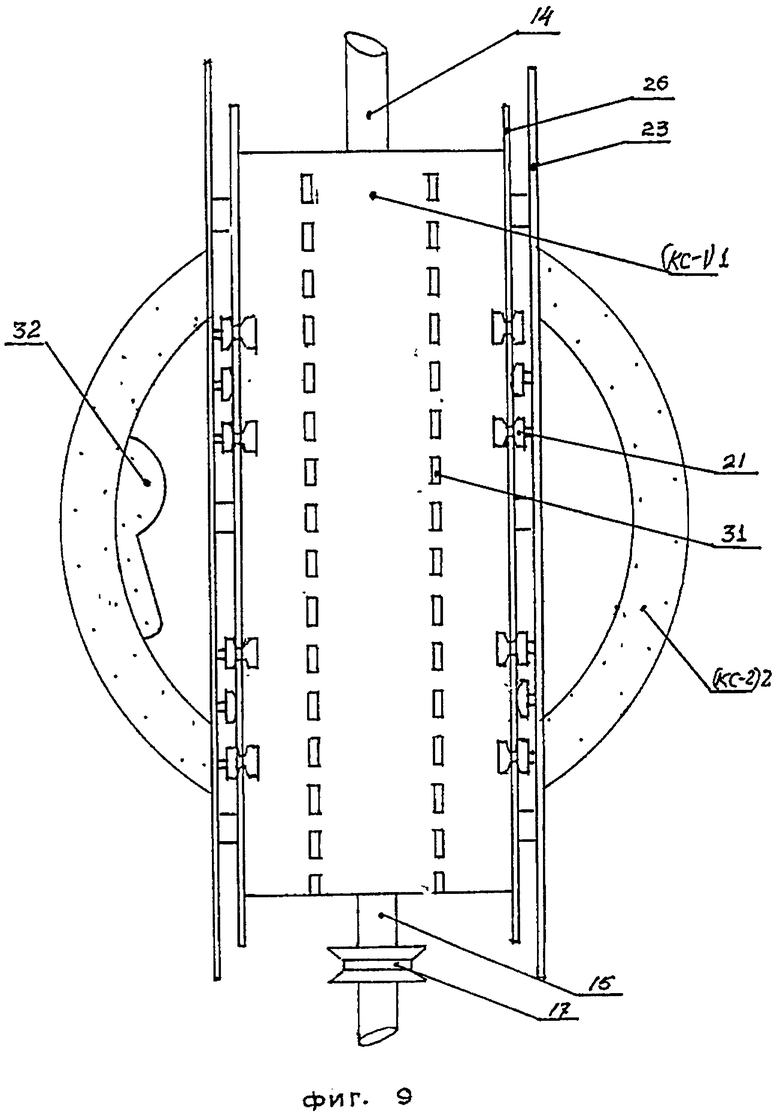
Фиг.9 - (КC-1)1 с перфорационными отверстиями, обеспечивающими работу зубчато-колесного механизма передвижения по крену.
Фиг.10 - (КС-2)2 с перфорационными отверстиями, обеспечивающими работу зубчато-колесного механизма передвижения по тангажу.
Фиг.11 - схема степеней свободы тренажера.
Универсальный тренажер содержит: кольцевую систему (КС-1) - 1, кольцевую систему (КС-2) - 2, кабину управления тренажером - 3, направляющие для гидроцилиндров - 4, гидроцилиндры - 5, платформу - 6, узел соединения горизонтальных ферм - 7, четыре соединительных узла - 8, нижний подшипниковый узел - 9, верхний подшипниковый узел - 10, вертикальные кольцевые фермы - 11, горизонтальную ферму - 12, ролики перемещения - 13, полую соединительную ось - 14, соединительную полуось - 15, подшипники -16, блок - 17, блок - 18, привод - 19, редуктор - 20, ролики вращения - 21, конический симметричный межколесный дифференциал - 22, внешнее подвижное кольцо (КС) - 23, компенсатор крутящих моментов - 24, полностью разгруженные полуоси - 25, внутреннее кольцо (КС) - 26, связующая полая полуось (КС-1)1 и (КС-2)2 - 27, трапециевидные сектора - 28, кожух подшипниковой муфты - 29, зубчатое колесо -30, перфорационное отверстие - 31, кожух зубчато-колесного механизма - 32, кожух (КС) - 33, шариковый компенсатор крутящего момента - 34, карданный вал - 35, прорези для колесно-зубчатой пары дифференциала - 36, реверсивный электродвигатель - 37.
Универсальный тренажер состоит из кабины управления тренажером 3, размещенной в двух взаимосвязанных кольцевых структурах (КС-1)1 и (КС-2)2, размещенных в трех взаимно перпендикулярных прочно скрепленных металлических несущих фермах, две из которых вертикальные 11, перпендикулярные друг другу в вертикальной плоскости, перпендикулярны третьей горизонтальной 12, находящейся в горизонтальной плоскости, горизонтальная 12 и вертикальные 11 фермы скреплены с платформой 6 тренажера через четыре соединительных узла 8 с направляющими 4, на которых закреплены ролики перемещения 13, и четыре гидроцилиндра 5, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах 11, расположенных вертикально, размещена кольцевая структура (КС-1)1, состоящая из двух колец, внутреннее неподвижное (относительно оси вращения) кольцо, имеющее двутавровый профиль 26, прочно скреплено с вертикальными фермами тренажера 11 по диаметру с помощью полой полуоси 14, установленной через подшипники 16 в верхний подшипниковый узел 10, и полуоси 15 установленной через подшипники 16 в нижний подшипниковый узел 9 основания, причем на нижней полуоси 15 расположен блок 17, который через привод 19 и блок 18 связан через редуктор 20 с электродвигателем Д3, приводящим во вращение всю конструкцию тренажера, внешнее подвижное кольцо 23 структуры (КС-1)1, имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора 28, жестко закреплены ролики вращения 21, с помощью которых внешнее подвижное кольцо 23 подвижно скреплено с внутренним кольцом 26, для плавности движения внешнего кольца относительно внутреннего предусмотрены ролики 24, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца 23 П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля 26, расположенный на внешней стороне структуры (КC-1)1 реверсивный электродвигатель Д1 через редуктор 20 соединен с зубчато-колесным механизмом, который состоит из реверсивного электродвигателя 37 (Д1, Д2), редуктора 20, карданного вала 35, соединяющего редуктор электродвигателя 37 с коническим симметричным межколесным дифференциалом 22, крутящий момент которого распределяется в равных частях между полностью разгруженными полуосями 25, проходящими через подшипниковые муфты крепления 29, на полуосях 25 симметрично относительно друг друга на равных расстояниях жестко закреплены два зубчатых колеса 30, которые, как и дифференциал, располагаются в прорезях 36 поверхности внешнего подвижного кольца систем (КC-1)1 и (КС-2)2, зубчатые колеса механизма передвижения наружными зубьями входят в постоянное зацепление с перфорированными отверстиями 31, расположенными по всей поверхности внутреннего (неподвижного относительно оси вращения) кольца 26.
Техническим результатом использования изобретения является разработка принципиально новой независимой кинематической схемы, позволяющей не ограничивать свободное вращение подвижных колец структур (KC-1)1 и (КС-2)2, обеспечивая этим неограниченное вращение кабины тренажера, сохраняя восемь степеней свободы, повышение скоростных параметров, что позволяет использовать его для выработки навыков работы в условиях экстремальных перегрузок, особенно для подготовки и повышения квалификации летного состава, выполнения всех фигур высшего пилотажа, включая «Вертикальный штопор», «Плоский штопор», «Горизонтальную бочку», «Мертвую петлю», что подтверждает универсальность предлагаемого тренажера, позволяющую имитировать все движения наземных и воздушных транспортных средств.
Заявляемое устройство промышленно применимо.
Совокупность указанных отличительных признаков позволяет создать тренажер нового уровня, существенно расширяет спектр применения данного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2359334C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| ТРЕНАЖЕР ПОКИДАНИЯ ТОНУЩЕГО ВЕРТОЛЕТА | 2017 |
|
RU2655570C1 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| Многофункциональный плуг с поворотным брусом | 2016 |
|
RU2618342C1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| СИМУЛЯТОР ПОЛЕТА КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2653448C1 |
Изобретение относится к области тренажеростроения и может быть использовано для выработки навыков работы в условиях перегрузок, а также в качестве развлечения. Изобретение направлено на обеспечение неограниченного вращения кабины тренажера по крену и тангажу при сохранении восьми степеней свободы и повышенных скоростных параметров кабины. Этот технический результат обеспечивается за счет того, что согласно изобретению свободное движение кабины тренажера по крену и тангажу осуществляется зубчато-колесными механизмами передвижения, закрепленными на подвижных кольцах двух систем, состоящими из реверсивных электродвигателей, редуктора, карданного вала, соединяющего редуктор электродвигателя с коническим симметричным межколесным дифференциалом, крутящий момент которого распределяется в равных частях между полностью разгруженными полуосями, проходящими через подшипниковые муфты крепления. При этом на полуосях симметрично относительно друг друга на равных расстояниях жестко закреплены два зубчатых колеса, которые, как и дифференциал, располагаются в прорезях поверхности внешнего подвижного кольца упомянутых систем, а зубчатые колеса механизма передвижения наружными зубьями входят в постоянное зацепление с перфорированными отверстиями, расположенными на всей поверхности внутреннего неподвижного относительно оси вращения кольца упомянутых систем симметрично друг другу на равноудаленном расстоянии. 11 ил.
Универсальный тренажер, включающий кабину управления тренажером с системой ее подвижности по углам крена и тангажа, размещенную в двух взаимосвязанных кольцевых структурах (КС-1) и (КС-2), размещенных в трех взаимно перпендикулярных прочно скрепленных кольцевых металлических несущих фермах, две из которых перпендикулярны друг другу в вертикальной плоскости, перпендикулярны третьей, находящейся в горизонтальной плоскости, горизонтальная и вертикальные фермы скреплены с платформой тренажера через четыре соединительных узла с направляющими, на которых закреплены ролики перемещения, и четыре гидроцилиндра, обеспечивающих возвратно-поступательное движение тренажера по вертикали, в основных несущих фермах, расположенных вертикально, размещена кольцевая структура (КС-1), состоящая из двух колец, внутреннего, неподвижного относительно оси вращения, имеющего двутавровый профиль, и прочно скрепленного с вертикальными фермами тренажера по диаметру с помощью полуосей, установленных в подшипниковых узлах, причем на нижней полуоси расположен блок, который через привод связан с блоком на редукторе реверсивного электродвигателя Д3, приводящим во вращение всю конструкцию тренажера, внешнее подвижное кольцо структуры (КС-1), имеющее П-образный профиль, на внутренних боковых поверхностях которого, представляющих из себя симметричные, равноудаленные трапециевидные сектора, жестко закреплены ролики вращения, с помощью которых внешнее кольцо подвижно скреплено с внутренним кольцом, для плавности движения внешнего кольца относительно внутреннего, предусмотрены ролики, являющиеся компенсаторами крутящих моментов системы, расположенные попарно на равных расстояниях относительно друг друга по всей внутренней поверхности внешнего кольца П-образного профиля, находящегося в постоянном контакте с внутренней поверхностью внутреннего кольца двутаврового профиля, отличающийся тем, что свободное движение кабины тренажера по крену и тангажу осуществляется зубчато-колесными механизмами передвижения, закрепленными на подвижных кольцах систем (КС-1) и (КС-2) и состоящими из реверсивных электродвигателей (Д1, Д2), редуктора, карданного вала, соединяющего редуктор электродвигателя с коническим симметричным межколесным дифференциалом, крутящий момент которого распределяется в равных частях между полностью разгруженными полуосями, проходящими через подшипниковые муфты крепления; на полуосях симметрично относительно друг друга на равных расстояниях жестко закреплены два зубчатых колеса, которые, как и дифференциал, располагаются в прорезях поверхности внешнего подвижного кольца систем (КС-1) и (КС-2), при этом зубчатые колеса механизма передвижения наружными зубьями входят в постоянное зацепление с перфорированными отверстиями, расположенными на всей поверхности внутреннего неподвижного относительно оси вращения кольца (КС-1), (КС-2) симметрично друг другу на равноудаленном расстоянии.
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2359334C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| JP 3025488 A, 04.02.1991 | |||
| Станок для обмотки концов проводников изолирующей пряжей | 1931 |
|
SU26362A1 |
| JP 2009002974 A, 08.01.2009. | |||

