Изобретение относится к области технической физики и может быть использовано при контроле параметров профилей сооружений метро, железнодорожных туннелей, трубопроводов, горных выработок и иных объектов.
Известен способ измерения негабаритности туннелей, основанный на формировании светового контура, соответствующего контуру поперечного сечения туннеля.
Устройство для реализации способа содержит узел для проецирования светового контура на трафарет и регистратор оптического сигнала светового контура в виде последовательно расположенных объектива, оптоэлектронного преобразователя и устройства обработки информации, см. авт. св. СССР №1323852, МПК G01B 21/00, 1986 г.
Известен способ измерения габаритов, заключающийся в сканировании объекта лазерным лучом.
Устройство для реализации способа содержит вращающуюся измерительную головку, частота вращения которой пропорциональна пройденному расстоянию и дальности до объекта, см. Rilssderger К. Ein neues Verfahren zur Vermessung des lichten Raumes von Eisenbahn Strecken, "Eisenbahningenieur", 1980, 31, №9, 387-388, 390-391, УДК 625.114, 12Г108.
Недостатком приведенных технических решений является низкое быстродействие и пониженная точность измерений.
Наиболее близким техническим решением (прототипом) к предлагаемому является способ построения профилей трехмерных объектов, включающий формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта в плоскости, поперечной направлению движения излучателя, с последующей обработкой отраженного от объекта сигнала для построения профилей объектов.
Устройство для построения профилей трехмерных объектов содержит установленный на подвижном объекте источник зондирующих световых импульсов, оптически сопряженный с отражающим элементом для дискретного сканирования объекта в плоскости, поперечной движению объекта, блок приема и обработки информации, устройство определения углового положения зондирующих импульсов, подключенное к блоку приема и обработки информации», и привод, см. пат. РФ №2091710, МПК G01B 21/20, G01C 3/00, публ. 27.09.97, Бюл. №27.
Недостатком приведенного технического решения является пониженная точность измерений, связанная со «смазом» отражаемого от объекта светового импульса, вследствие вращения отражающего элемента (зеркала) для дискретного сканирования объекта, а также низкая технологичность за счет использования дорогостоящего импульсного лазера со сложной системой управления в качестве источника зондирующих импульсов.
Технический результат от использования предлагаемого технического решения заключается в повышении точности измерений и повышении технологичности устройства для реализации способа.
В соответствии с предлагаемым техническим решением, указанный технический результат достигается тем, что в способе построения профилей трехмерных объектов, включающем формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта в плоскости, поперечной направлению движения излучателя, с последующей обработкой отраженного от объекта сигнала для построения профилей объектов, перед обработкой отраженного от объекта сигнала формируют пучок лазерного излучения в непрерывном режиме, расширяют сформированный пучок, преобразуют расширенный пучок в световой пучок кольцевого сечения, а формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта осуществляют путем последовательно-поочередного вырезания фрагментов из поперечного сечения полученного светового пучка кольцевого сечения.
В устройстве для построения профилей трехмерных объектов, содержащем установленный на подвижном объекте источник зондирующих световых импульсов, оптически сопряженный с отражающим элементом для дискретного сканирования объекта в плоскости, поперечной движению объекта, блок приема и обработки информации, устройство определения углового положения зондирующих импульсов, подключенное к блоку приема и обработки информации, и привод, при этом источник зондирующих световых импульсов выполнен в виде последовательно установленных вдоль общей оси источника лазерного излучения непрерывного действия, коллиматора, конического аксикона в виде внутреннего входного и наружного выходного зеркальных конусов, вращающегося диска, подключенного к приводу, и неподвижного плоского кольцевого элемента, а оптический элемент для дискретного сканирования объекта - в виде конуса с зеркальной боковой поверхностью, причем неподвижный плоский кольцевой элемент выполнен с равномерно расположенными по его периферии сквозными каналами, а вращающийся диск - с отверстием, расположенным напротив указанных каналов плоского кольцевого элемента, для последовательно-поочередного вырезания световых импульсов из излучения с выходного зеркального элемента аксикона при подаче на зеркальную боковую поверхность конуса.
Кроме того, на боковой поверхности вращающегося диска предусмотрены равномерно расположенные радиальные выступы по числу каналов неподвижного кольцевого элемента, а устройство определения углового положения зондирующих импульсов выполнено в виде свето- и фотодиода, смонтированных по разные стороны торцевых поверхностей вращающегося диска, напротив радиальных выступов последнего.
Кроме того, привод вращающегося диска выполнен в виде вентильного двигателя, управляющий орган которого подключен к блоку приема и обработки информации.
Кроме того, на зеркальной боковой поверхности конуса предусмотрены лыски, расположенные напротив каналов неподвижного плоского кольцевого элемента.
На чертеже изображена схема устройства для реализации предлагаемого способа.
Устройство содержит источник зондирующих световых импульсов, установленный на подвижном объекте (в графических материалах условно не показан) и выполненный в виде последовательно установленных на одной оптической оси источника - 1 непрерывного лазерного излучения, коллиматора - 2, конического аксикона с внутренним входным и наружным выходным конусами - 3 и 4, вращающегося диска - 5, подключенного к вентильному двигателю - 6 с управляющей системой - 7, и неподвижного плоского кольцевого элемента - 8, установленного напротив оптического элемента для дискретного сканирования объекта, изготовленного в виде конуса - 9 с зеркальной боковой поверхностью. На плоском кольцевом элементе - 8 выполнены равномерно расположенные по его периферии сквозные каналы - 10, а на диске - 5 напротив каналов - 10 предусмотрено отверстие - 11. Между плоским кольцевым элементом - 8 и диском - 5 размещен блок - 12 для приема и обработки отраженного от объекта (точка М) светового сигнала. На боковой поверхности диска - 5 предусмотрены равномерно расположенные радиальные выступы - 13 (количество выступов - 13 равно числу каналов - 10 элемента - 8), по разные стороны которых размещены светодиод - 14 и фотодиод - 15, подключенный к блоку - 12 (для определения углового положения зондирующих импульсов). Для контроля угловой скорости вращения диска - 5 управляющий орган (система) - 7 двигателя - 6 также подключен к блоку - 12.
Для уменьшения угла расходимости зондирующего импульса, отраженного от боковой поверхности конуса - 9, на последней могут быть предусмотрены плоские зеркальные лыски - 16, расположенные напротив каналов - 10 элемента - 8.
Реализация предлагаемого способа с помощью приведенной схемы осуществляется следующим образом.
С помощью источника - 1 формируют узконаправленный пучок непрерывного лазерного излучения, расширяют пучок с помощью коллиматора - 2, последовательно подают расширенный пучок на отражающие поверхности конусов - 3 и 4 аксикона, получая световой пучок - А кольцевого сечения. Пучок - А подают на диск - 5 коаксиально его оси в области расположения отверстия - 11. Затем с помощью отверстия - 11 вращающегося диска - 5 и каналов - 10 кольцевого элемента - 8 производят формирование зондирующих импульсов лазерного излечения для дискретного сканирования объекта путем последовательно-поочередного вырезания фрагментов из поперечного сечения пучка - А.
Каждый сформированный импульс лазерного излучения после прохождения одного из каналов - 10 элемента - 8 подается на боковую поверхность конуса - 9 (или на лыску - 16 при ее наличии) и далее на поверхность исследуемого объекта (точка М). Отраженный от поверхности исследуемого объекта световой сигнал переотражается боковой поверхностью конуса и поступает на вход блока - 12, где производят его обработку для построения профиля объекта. Обработку отраженного сигнала производят по одному из известных алгоритмов, например по алгоритму, описанному в прототипе (пат. РФ №2091710).
Следует отметить, что данная схема реализации дает возможность получить очень высокую частоту следования сканирующих импульсов. Так, например, при наличии в кольцевом элементе 102 каналов и частоте вращения вентильного двигателя 1,5·105 об/мин частота следования зондирующих импульсов будет равняться 2,5·105 имп./сек.
Из вышеприведенного следует, что предложенное техническое решение имеет преимущество по сравнению с известными, а именно за счет отсутствия вращения зеркального элемента полностью исключается «смаз» зондирующего импульса на поверхности исследуемого объекта, что повышает точность измерений. Кроме того, использование непрерывного источника лазерного излучения вместо импульсного повышает технологичность изделия.
На предприятии в настоящее время по материалам заявки изготовлен макетный образец, испытания которого подтвердили достижение указанного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| БЛОК ДАТЧИКА ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТИ ОБЪЕКТА И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО КОНТРОЛЯ | 1998 |
|
RU2186372C2 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ПРИ ЕГО ДОСТАВКЕ НА ОБЪЕКТ, ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ УПРАВЛЕНИЯ ЛАЗЕРНОЙ СИСТЕМОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ЛАЗЕРНОЙ СИСТЕМОЙ | 2006 |
|
RU2326478C2 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 2016 |
|
RU2638110C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КАЧЕСТВА ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249787C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЯ С ОПТОВОЛОКОННЫМ ВЫВОДОМ НА ЦЕЛЬ | 2023 |
|
RU2816822C1 |
Изобретение может быть использовано при контроле параметров профилей сооружений метро, железнодорожных туннелей, трубопроводов, горных выработок и иных объектов. Способ построения профилей трехмерных объектов, включающий формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта в плоскости, поперечной направлению движения излучателя, с последующей обработкой отраженного от объекта сигнала для построения профилей объектов, отличающийся тем, что перед обработкой отраженного от объекта сигнала формируют пучок лазерного излучения в непрерывном режиме, расширяют сформированный пучок, преобразуют расширенный пучок в световой пучок кольцевого сечения, а формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта осуществляют путем последовательно-поочередного вырезания фрагментов из поперечного сечения полученного светового пучка кольцевого сечения. Технический результат: повышение точности измерений и технологичности изделия. 2 н. и 3 з.п. ф-лы, 1 ил.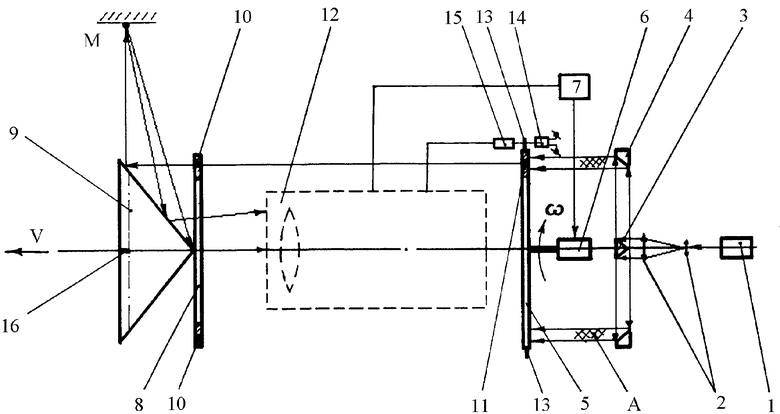
1. Способ построения профилей трехмерных объектов, включающий формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта в плоскости, поперечной направлению движения излучателя, с последующей обработкой отраженного от объекта сигнала для построения профилей объектов, отличающийся тем, что перед обработкой отраженного от объекта сигнала формируют пучок лазерного излучения в непрерывном режиме, расширяют сформированный пучок, преобразуют расширенный пучок в световой пучок кольцевого сечения, а формирование зондирующих импульсов лазерного излучения для дискретного сканирования объекта осуществляют путем последовательно-поочередного вырезания фрагментов из поперечного сечения полученного светового пучка кольцевого сечения.
2. Устройство для построения профилей трехмерных объектов, содержащее установленный на подвижном объекте источник зондирующих световых импульсов, оптически сопряженный с отражающим элементом для дискретного сканирования объекта в плоскости, поперечной движению объекта, блок приема и обработки информации, устройство определения углового положения зондирующих импульсов, подключенное к блоку приема и обработки информации, и привод, отличающееся тем, что источник зондирующих световых импульсов выполнен в виде последовательно установленных вдоль общей оси источника лазерного излучения непрерывного действия, коллиматора, конического аксикона в виде внутреннего входного и наружного выходного зеркальных конусов, вращающегося диска, подключенного к приводу, и неподвижного плоского кольцевого элемента, а оптический элемент для дискретного сканирования объекта - в виде конуса с зеркальной боковой поверхностью, при этом неподвижный плоский кольцевой элемент выполнен с равномерно расположенными по его периферии сквозными каналами, а вращающийся диск - с отверстием, расположенным напротив указанных каналов плоского кольцевого элемента, для последовательно-поочередного вырезания световых импульсов из излучения с выходного зеркального элемента аксикона при подаче на зеркальную боковую поверхность конуса.
3. Устройство по п.2, отличающееся тем, что на боковой поверхности вращающегося диска предусмотрены равномерно расположенные радиальные выступы по числу каналов неподвижного кольцевого элемента, а устройство определения углового положения зондирующих импульсов выполнено в виде свето- и фотодиода, смонтированных по разные стороны торцевых поверхностей вращающегося диска, напротив радиальных выступов последнего.
4. Устройство по п.2, отличающееся тем, что привод вращающегося диска выполнен в виде вентильного двигателя, управляющий орган которого подключен к блоку приема и обработки информации.
5. Устройство по п.2, отличающееся тем, что на зеркальной боковой поверхности конуса предусмотрены лыски, расположенные напротив каналов неподвижного плоского кольцевого элемента.
| Измеритель негабаритности тоннелей | 1986 |
|
SU1323852A1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| DE 19513116 А, 10.10.1996 | |||
| Испаритель-конденсатор | 1983 |
|
SU1138636A2 |
| ВЕДРО ИЗ ИСКУССТВЕННОГО МАТЕРИАЛА, ИЗГОТОВЛЕННОЕ ЛИТЬЕМ ПОД ДАВЛЕНИЕМ | 1995 |
|
RU2098329C1 |

