ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройствам предупреждения об опасном угле тангажа самолета и к системам предупреждения опасного сближения с землей. Более конкретно, изобретение относится к системам предупреждения опасного сближения с землей, в которых критерии предупреждения включают угол тангажа самолета.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В процессе полета летательные аппараты восприимчивы к потере продольной балансировки, когда самолет неожиданно задирает нос на чрезмерно большой угол. Если автопилот самолета неправильно отрегулирован по оси тангажа при его вводе в работу, самолет может войти в неконтролируемый крен неожиданно для пилота. Некоторые модели самолетов могут быть более восприимчивы к выходу из под контроля продольной балансировки чем другие. Они включают те типы самолетов, которые разработаны с расчетом снижения лобового сопротивления при крейсерском полете за счет регулирования на малой скорости. При малых скоростях, которые используются у взлетно-посадочной полосы, пилот может быть склонен к изменению угла тангажа самолета, увеличивая, таким образом, риск потенциально опасного наклона самолета относительно его продольной оси. Точно так же, когда самолет летит под высоким углом тангажа или задирает нос в момент отрыва от земли, пилот может потерять из виду горизонт и оказаться дезориентированным. Ни в одной из этих ситуаций пилот не уведомляется заранее о чрезмерном наклоне самолета относительно его главной поперечной оси, что значительно снижает безопасность полета.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству и способу для повышения внимания пилота при опасной ситуации и повышения безопасности полета, привлекая внимание пилота к увеличению продольного крена во всех описанных выше ситуациях, когда имеет место чрезмерный наклон самолет относительно его главной поперечной оси (тангаж), и обеспечивающие раннее предупреждение пилота с тем, чтобы он мог предпринять соответствующее превентивное действие.
В соответствии с одной целью изобретения предусматривается использование устройства предупреждения об опасном угле тангажа, которое включает логическую схему предупреждения, имеющую вход для сигнала, который является представлением индикаторного угла тангажа самолета, при этом логическая схема предупреждения выполнена таким образом, что она позволяет определить разницу между сигналом угла тангажа, полученным на входе, и заранее заданной пороговой величиной, при этом логическая схема предупреждения также выдает выходной сигнал, представляющий разницу между этими двумя сигналами; генератор предупредительной сигнализации, получающий выходной сигнал от логической схемы предупреждения, при этом генератор предупредительной сигнализации структурирован таким образом, что он вырабатывает предупреждающий сигнал, как функцию разницы между этими двумя сигналами.
Согласно другой цели изобретения, логическая схема предупреждения дополнительно структурирована так, чтобы вычислять скорость изменения индикаторного угла тангажа и компенсировать полученный индикаторный сигнал угла тангажа, как функцию скорости изменения угла тангажа перед определением разницы между индикаторным сигналом угла тангажа и заранее заданной пороговой величиной, в результате чего определяется разница между компенсированным сигналом угла тангажа и заранее заданной пороговой величиной.
Согласно другой цели изобретения, логическая схема предупреждения дополнительно структурирована с расчетом постоянной компенсации полученного сигнала угла тангажа, как функции увеличения скорости изменения угла тангажа. Соответственно, эта разница определяется между предельным пороговым значением и сигналом угла тангажа, который либо компенсируется по скорости изменения угла тангажа, либо освобождается от такой компенсации. Кроме того, согласно еще одной цели изобретения, устройство включает узел выбора, который обеспечивает возможность выбора между компенсированным сигналом угла тангажа и сигналом угла тангажа, который не был компенсирован.
В соответствии с еще одной целью изобретения устройство предупреждения об опасном угле тангажа используется совместно либо с системой предупреждения опасного сближения с землей, либо с усовершенствованной системой предупреждения опасного сближения с землей. Устройство предупреждения об опасном угле тангажа по настоящему изобретению используется, например, как система предупреждения опасного сближения с землей для самолета, в котором логическая схема предупреждения угла тангажа приводится в действие процессором, который связан с генератором предупредительной сигнализации системы предупреждения опасного сближения с землей, при этом процессор получает множество сигналов, представляющих параметры полета самолета, которые включают сигнал, представляющий разницу между сигналом угла тангажа и пороговым значением, а логическая схема предупреждения дополнительно получает сигнал положения, представляющий положение самолета, при этом логическая схема предупреждения дополнительно сравнивает сигналы параметров полета и формирует сигнал предупреждения в ответ на предопределенную взаимосвязь между выбранными сигналами параметров полета; система предупреждения опасного сближения с землей дополнительно снабжена логикой условия, которая оперативно соединена с логикой предупреждения, при этом логика условия выполнена с расчетом получения сигнала положения и изменения одного или нескольких предопределенных взаимосвязей, как функции положения самолета относительно предопределенного местоположения.
Сигналы параметров полета включают, например, радиосигнал высоты, барометрический сигнал, сигнал отклонения наклона глиссады в дополнение к разностному сигналу угла тангажа устройства предупреждения согласно изобретению, при этом процессор включает в действие логическую схему предупреждения для получения сигнала предупреждения в ответ на предопределенные взаимосвязи между радиосигналом высоты, барометрическим сигналом высоты, сигналом отклонения наклона глиссады и разницы между сигналом угла тангажа и пороговым значением; при этом логика условия выполнена таким образом, что она выдает сигнал положения и изменяет один или несколько предопределенных взаимосвязей, как функции положения самолета относительно предопределенного местоположения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанные цели и преимущества настоящего изобретения станут более понятны при чтении последующего подробного описания изобретения со ссылками на сопровождающие чертежами, на которых:
Фигура 1 - блок-схема одного примерного варианта устройства, чувствительного к углу тангажа, показанного как часть изобретения;
Фигура 2 - блок-схема механизма предупреждения по настоящему изобретению, который активизируется, когда угол тангажа больше мгновенного значения предельного угла тангажа; и
Фигура 3 - функциональная блок-схема, которая показывает один вариант устройства предупреждения об угле тангажа в сочетании с системой предупреждения опасного сближения с землей, имеющей определение географической области.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО
ВАРИАНТА ИЗОБРЕТЕНИЯ
На фигурах одинаковые цифровые позиции обозначают одни и те же элементы. Настоящее изобретение представляет собой устройство предупреждения об опасном угле тангажа, имеющее средство для получения первого сигнала, представляющего собой индикаторный угол тангажа, и второго сигнала, представляющего собой предопределенный пороговый угол тангажа; оперативно соединенное средство, на которое подается индикаторный сигнал угла тангажа и пороговый сигнал угла тангажа для сравнения и определения разницы между индикаторным и пороговым сигналами угла тангажа; оперативно соединенное средство для сравнения и определения разницы для формирования консультативного индикаторного сигнала, как функции разницы между индикаторным и пороговым сигналами угла тангажа. Устройство предупреждения об опасном угле тангажа дополнительно включает средство для определения скорости изменения индикаторного угла тангажа и средство для компенсации индикаторного сигнала угла тангажа. Средство для компенсации сигнала угла тангажа действует как функция скорости изменения индикаторного угла тангажа. Устройство предупреждения об опасном угле тангажа работает на любой из пар индикаторного сигнала угла тангажа и компенсированного сигнала угла тангажа и дополнительно включает средство для выбора между индикаторным сигналом угла тангажа и компенсированным сигналом угла тангажа.
На фигуре 1 показано устройство предупреждения об опасном угле тангажа настоящего изобретения, где на блок-схеме показано устройство предупреждения об опасном угле тангажа 10, которое может быть реализовано программным или соответствующим аппаратным способом. Как показано на блок-схеме фигуры 1, устройство предупреждения об опасном угле тангажа 10 включает процессор 12. Измеренный или индикаторный сигнал 14 угла тангажа самолета и сигнал порогового угла 16 являются входами логической схемы предупреждения 18, также известной как "генератор сигналов предупреждения". Индикаторный сигнал 14 угла тангажа самолета выдается обычным указателем угла тангажа 20 и контролируется логической схемой предупреждения 18 с заранее заданной частотой выборки. Сигнал порогового угла 16 подается как предопределенная предельная величина, введенная в логическую схему предупреждения 18. Например, сигнал порогового угла 16 подается как величина, хранящаяся в памяти 22, которая связана с логической схемой предупреждения 18 таким образом, что сигнал порогового угла 16 доступен логической схеме предупреждения 18.
Логическая схема предупреждения 18 может быть выполнена, например, в виде цепи, имеющий схему сравнения, которая сравнивает текущую выборку индикаторного сигнала угла тангажа 14 с программным входом 16 и вырабатывает выходной сигнал, как функцию разницы этих сигналов. С другой стороны, логическая функция предупреждения 18 может использовать алгоритм предупреждения опасного угла тангажа, который выполняет сравнение и обеспечивает разностный сигнал. Выход логической схемы предупреждения 18 подается на генератор сигналов предупреждения 24, который формирует предупреждающий сигнал или предупреждение 26, когда индикаторный угол тангажа 14 превышает программную величину угла порога 16. Например, генератор сигналов предупреждения 24 может работать как "речевой" генератор и формирует предупреждение 26 в виде однозначного звукового сигнала тревоги типа "Положение по тангажу. Положение по тангажу", который передается по громкоговорителю 28, как извещение пилоту, если индикаторный угол тангажа 14 превышает программный порог оповещения 16. Альтернативно могут выдаваться эквивалентные речевые сообщения, чтобы предупредить пилота относительно чрезмерного угла тангажа. Генератор сигналов предупреждения 24 может также работать как генератор "дисплея" и выдавать эквивалентную визуальную информацию 26 типа "Положение по тангажу" или другое полезное и однозначное предупреждение на освещенном дисплее 30, видимом пилотом.
В соответствии с изобретением рассматриваются различные варианты устройства предупреждения об опасном угле тангажа 10. Согласно одному варианту изобретения, устройство предупреждения об опасном угле тангажа 10 работает с использованием некомпенсированного индикаторного сигнала угла тангажа или индикаторным сигналом угла тангажа 14, пропускаемым через фильтр 32 для снижения помех. Иными словами, устройство предупреждения об опасном угле тангажа 10 работает на фильтрованном сигнале, но, в основном, на сигнале прямого измерения угла тангажа самолета, осуществляемого указателем угла тангажа 20. Согласно другому варианту, индикаторный сигнал угла тангажа 14 проходит через блок компенсации 34, в котором сигнал 14 фильтруется для снижения помех, и компенсируется. В данном случае устройство предупреждения об опасном угле тангажа 10 в соответствии с изобретением работает на фильтрованном индикаторном выходном сигнале угла тангажа, компенсированном функциональным блоком компенсации 34. Согласно другому варианту изобретения, индикаторный сигнал угла тангажа 14 может быть выбран из некомпенсированного индикаторного сигнала или из компенсированного индикаторного сигнала. Например, может быть использован переключатель или штекерный разъем 38 для подключения к тому или другому фильтру 32 и к функциональному блоку компенсации 34 с логической схемой предупреждения 18. Альтернативно этот выбор может быть сделан программным способом.
Соответственно, один сигнал, выбранный из некомпенсированных и компенсированных индикаторных сигналов угла тангажа 32, 34, сравнивается с программным пороговым углом 16 алгоритма предупреждения опасного угла тангажа, используемым логической схемой предупреждения 18. Генератор сигналов предупреждения 24 формирует предупреждение 26 как функцию разницы, определенную логической схемой предупреждения 18. Предупреждение 26 формируется, если индикаторный угол тангажа 14 превышает программный пороговый угол 16. Однако если индикаторный угол тангажа 32, 34 не будет превышать программный пороговый угол 16, устройство предупреждения об опасном угле тангажа 10 продолжает контролировать индикаторные сигналы угла тангажа 32, 34 без формирования предупреждения 26.
Как описано выше, сигнал 32 с выхода фильтра фильтруется, но он является некомпенсированным индикаторным сигналом угла тангажа 14. Напротив, компенсированный индикаторный сигнал угла тангажа выдается функциональным блоком компенсации 34 и включает коэффициент смещения, который используется для учета быстрых изменений угла тангажа самолета, который можно вычислить как скорость изменения индикаторного сигнала угла тангажа 14, или этот коэффициент может быть получен как входной сигнал "угловой скорости по тангажу". После вычисления устройством предупреждения 10 индикаторный сигнал угла тангажа 14 подается на функциональный узел скорости тангажа 36, который контролирует этот параметр в течение предопределенного периода выборки и вычисляет угловую скорость по тангажу. Функциональный блок угловой скорости по тангажу 36 выдает сигнал угловой скорости по тангажу, который используется функциональным блоком компенсации 34 для вычисления компенсированного индикаторного сигнала угла тангажа. Альтернативно угловая скорость по тангажу может быть получена непосредственно как входной сигнал 40 "угловой скорости по тангажу". Компенсация изменяет индикаторный сигнал угла тангажа 14, который применяется в логической схеме предупреждения 18, в частности, когда имеет место высокая угловая скорость по тангажу. Например, индикаторный сигнал угла тангажа 14 смещен вверх коэффициентом компенсации, который является либо заданной величиной, либо величиной, которая вычислена как функция угловой скорости по тангажу. Коэффициент компенсации может быть ограничен, чтобы обеспечить предопределенную максимальную компенсацию, например максимальную компенсацию в 10 градусов. В соответствии с одним вариантом изобретения компенсированный индикаторный сигнал угла тангажа с выхода функционального блока компенсации 34 эквивалентен индикаторному сигналу угла тангажа 14, смещенного вверх вычисленным коэффициентом компенсации, посредством чего величина угловой скорости тангажа умножается, используя заранее заданный коэффициент умножения, и результат прибавляется к величине индикаторного сигнала угла тангажа 14 по формуле

где С - компенсированный индикаторный сигнал угла тангажа с выхода функционального блока компенсации 34,
I - индикаторный сигнал угла тангажа 14,
R - вычисленная угловая скорость по тангажу с выхода функционального блока угловой скорости по тангажу 36 и
G - прирост угловой скорости по тангажу.
Таким образом, компенсация увеличивается как функция прироста угловой скорости по тангажу R. Угловая скорость по тангажу G представлена как коэффициент умножения. Прирост угловой скорости по тангажу может быть равен единице, в результате чего компенсированный индикаторный сигнал угла тангажа C с выхода функционального блока компенсации 34 является простой суммой индикаторного сигнала угла тангажа 14 и угловой скорости по тангажу R.
Однако прирост угловой скорости по тангажу может быть положительным множителем, так что индикаторный сигнал угла тангажа 14 смещается вверх, увеличивая коэффициент компенсации, который вычисляется, используя угловую скорость по тангажу R, умноженную на прирост G. Например, индикаторный сигнал угла тангажа 14 смещается вверх, увеличивая коэффициент компенсации, который вычисляется, используя вычисленную по тангажу угловую скорость R, умноженную на положительный прирост G порядка 1,2 с тем, чтобы коэффициент компенсации 1,2 градуса был добавлен к индикаторному сигналу угла тангажа 14 в течение каждого 1 градуса/секунду угловой скорости по тангажу. Соответственно, для индикаторной угловой скорости по тангажу 14 порядка 1 градуса и вычисленной угловой скорости по тангажу R порядка 1 градус/секунду блок компенсации 34 вычисляет индикаторный сигнал угла тангажа С как 1 градус плюс 1 градус/секунду, умноженный на 1,2, что дает результат 2,2 градуса. В другом примере для индикаторной угловой скорости по тангажу 14 из 16 градусов и вычисленной угловой скорости по тангажу R в 11 градусов/секунду компенсированный индикаторный сигнал угла тангажа С представляет собой сумму 16 градусов плюс 11 градусов/секунду, умноженные на 1,2, что дает 16 градусов плюс 13,2 градусов и равно 29,2 градусам. Если пороговый угол 16 заранее установлен равным 30 градусам, алгоритм предупреждения опасного угла тангажа, используемого логической схемой предупреждения 18, выдаст сигнал, например, НИЗКИЙ или ЛОЖНЫЙ, который указывает, что индикаторный угол тангажа 14 не превышает предопределенный пороговый угол 16. Генератор сигналов предупреждения 24 не формирует предупреждения 26.
Однако в другом примере для индикаторного угла тангажа 14 в 27 градусов и вычисленной угловой скорости по тангажу R, равной 5 градусов/секунду, компенсированный сигнал угла тангажа С вычисляется как 27 градусов плюс времена 5 градусов/секунду, умноженные на 1,2, что дает 27 градусов плюс 6 градусов и равняется в сумме 33 градусам. Учитывая, что пороговый угол 16 предварительно установлен равным 30 градусам, логическая функция предупреждения 18 о большом угле тангажа выдает сигнал, например, ВЫСОКИЙ или ИСТИННЫЙ, который указывает, что индикаторный угол тангажа 14 превышает предопределенный пороговый угол 16. Генератор сигналов предупреждения 24 получает выходной сигнал логической схемы предупреждения 18 угла тангажа и формирует предупреждение 16, как описано выше. Угловая скорость по тангажу G может быть постоянной, как описано выше, или может изменяться как функция угловой скорости по тангажу R или индикаторного угла тангажа 14. Эквивалентные варианты устройства предупреждения об опасном угле тангажа 10 в соответствии с изобретением включает добавление к индикаторному сигналу угла тангажа 14 коэффициента компенсации, который является заранее установленной или постоянной добавочной величиной К, которая не зависит ни от величины угловой скорости по тангажу R, ни от индикаторного угла тангажа К, как приведено ниже:
где С - снова компенсированный индикаторный сигнал угла тангажа на выходе функционального блока компенсации 34,
I - снова индикаторный сигнал угла тангажа 14 и
К - предопределенная постоянная величина.
Кроме того, коэффициент компенсации изменяется для различных типов самолетов, как обсуждено ниже. Такая адаптация используется в зависимости от того, является ли коэффициент компенсации угловой скоростью по тангажу R, умноженной на прирост угловой скорости G, или он является заранее заданной постоянной добавочной величиной К.
Различные самолеты реагируют на изменение тангажа по-разному. Например, небольшой маневренный самолет, в основном, требует меньшего количества сигналов раннего предупреждения о завышенном угле тангажа, поскольку он более чувствителен к корректирующим командам. Следовательно, при использовании устройства предупреждения об опасном угле тангажа 10 в небольших частных самолетах и самолетах бизнес класса может быть выбран более простой, некомпенсированный выход индикаторного сигнала утла тангажа из фильтра 32. Компенсированный индикаторный сигнал угла тангажа с выхода функционального блока компенсации 34 выбирается для большого коммерческого самолета, чтобы обеспечить ранее оповещение об избыточном тангаже. Прирост угловой скорости по тангажу G, используемый в устройстве 10, произвольно настраивается для различных типов коммерческих самолетов, на основании реакции самолета на команды управления углом тангажа.
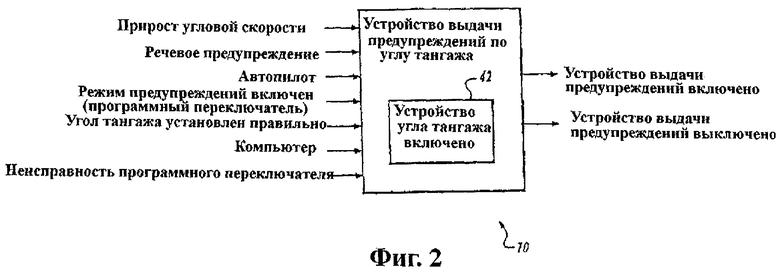
На фигуре 2 показано устройство предупреждения об опасном угле тангажа 10 в соответствии с изобретением, в котором имеются конфигурируемые входы, которые подтверждают достоверность предупреждения 26 и корректируют или полностью устраняют неоправданные предупреждения об опасности. Как показано на фигуре 2, устройство предупреждения об опасном угле тангажа 10 в соответствии с изобретением включает следующие конфигурируемые входы: опасный пороговый угол 16; компенсация угла тангажа включена; угловая скорость по тангажу G; автопилот включен; непрерывная или периодическая подача сигнала предупреждения 26. Соответственно, программный аварийный пороговый угол 16 в данной конфигурации определяет величину угла тангажа, с которой сравнивается выбранный некомпенсированный или компенсированный индикаторный сигнал. Опасный пороговый угол 16 дополнительно устанавливается в зависимости от типа самолета. Например, величина опасного порогового угла 16 может быть выбрана более высокой для обсужденного выше небольшого, более маневренного самолета, который, в основном, не требует сложной системы предупреждений об избыточном угле тангажа благодаря его быстрой реакции на корректирующие команды.
Схема компенсации угла тангажа определяет, включена ли компенсация угла тангажа или она отключена. Как обсуждено выше, более простой, некомпенсированный выход индикаторного сигнала угла тангажа с фильтра 32 может быть выбран для небольшого самолета, который лучше реагирует на команды управления углом тангажа, тогда как компенсированный индикаторный сигнал угла тангажа с выхода функционального угла компенсации 34 выбирается для раннего предупреждения в случае большого самолета. Кроме того, низкий или более консервативный опасный пороговый угол 16 может иметь место, когда компенсация выключена, и используется ранее предупреждение об избыточном тангаже, чтобы балансировать отсутствие компенсации.
Угловая скорость по тангажу G, используемая в данной конфигурации компенсации угла тангажа, определяет величину раннего предупреждения, предусмотренного при чрезмерном наклоне самолета относительно его поперечной оси, когда вводится компенсация, как это подробно обсуждено здесь.
Автопилотная конфигурация используется, чтобы установить нижний или более консервативный опасный пороговый угол 16, когда включен автопилот. Таким образом, включение автопилота обеспечивает более высокий уровень чувствительности к потенциальным ударам по хвостовой части, когда пилот полностью управляет самолетом.
Конфигурация предупреждения 26 определяет, используется ли предупреждение 26 в непрерывном или "прерывистом" режиме. Непрерывно поступающее предупреждение 26 может отвлечь пилота при наиболее тяжелых условиях полета. Предупреждение 26 может быть периодическим и, таким образом, упорядочивать речевые или визуальные оповещения, отвлекающие внимание пилота и налагающие на него дополнительную нагрузку. Например, предупреждение 26 может быть первоначально выдано, когда индикаторный сигнал угла тангажа 14 превышает опасный пороговый угол 16, и затем предупреждение выдается только в тех случаях, когда индикаторный сигнал угла тангажа превышает опасный пороговый угол 16 на предопределенную величину, например на 20 процентов.
В устройстве предупреждения об опасном угле тангажа 10 согласно изобретению могут быть использованы другие дополнительные входы, чтобы избежать или полностью устранить ложные предупреждения путем отключения устройства предупреждения об опасном угле тангажа 10, когда один или несколько входов устройства предупреждения 10 не действуют. Эти входы применяются, например, к функции 42 "угол тангажа включен" устройства предупреждения об опасном угле тангажа 10 при включении устройства предупреждения 10, когда введены в действие входы, полезные для устранения ложных предупреждений. Один вход или сигнал "предупреждение об угле тангажа включено" снабжен программным переключателем, подтверждающим, что устройство предупреждения 10 введено в действие. Сигнал "предупреждение об угле тангажа включено" является ИСТИННЫМ, когда устройство предупреждения об опасном угле тангажа 10 введено в действие, но является ЛОЖНЫМ, если устройство 10 выключено.
Другой вход или сигнал "достоверный угол тангажа" контролирует работу устройства и сообщает о величине индикаторного сигнала угла тангажа 14 с выхода указателя угла тангажа 20. Параметр "достоверный угол тангажа" устанавливается в программе как ИСТИННЫЙ, если сигнал угла тангажа 14 действителен, но он меняется на ЛОЖНЫЙ, если сигнал 14 не проходит.
Дополнительный вход или сигнал "конфигурация программного переключателя" контролирует работу устройства и сообщает о непрерывной величине конфигурации программного переключателя. Если программные переключатели правильно сконфигурированы, сигнал "конфигурация программного переключателя" установлен в программе как ИСТИННЫЙ. ЛОЖНЫЙ выход указывает, что конфигурация программного переключателя неправильна, и заставляет устройство предупреждения об опасном угле тангажа 10 игнорировать сообщения об опасном угле тангажа.
Сигнал "компьютер" сообщает о непрерывной работе процессора 12, который управляет устройством предупреждения 10. Сигнал "компьютер" устанавливается в программе как ИСТИННЫЙ, если процессор 12 включен, но он меняется на ЛОЖНЫЙ, если этот процессор выключен.
Некоторые из этих дополнительных входов помогают определить, как устройство предупреждения об опасном угле тангажа 10 взаимодействует с бортовой системой предупреждения опасного сближения с землей (СПОС), включая улучшенную систему предупреждения опасного сближения с землей (УСПОС).
В авиации известны различные системы, которые обеспечивают сигналы предупреждения или консультативные сообщения в случае опасных условий полета. К ним принадлежат системы, в основном, известные как системы предупреждения опасного сближения самолета с землей, которые используются, чтобы контролировать условия полета самолета и обеспечить соответствующее предупреждение, если условия полета таковы, что возникает угроза столкновения с землей. Условия полета контролируются такими системами с помощью таких приборов, как радиовысотомер и измеритель скорости, барометрический измеритель высоты и скорости, измеритель скорости воздушного потока и указатели положения шасси и закрылок. Вышеупомянутые параметры контролируются, и формируется консультативное сообщение или предупреждение, когда взаимосвязи между вышеупомянутыми условиями или параметрами таковы, что возникает вероятность удара о землю. Типичные примеры таких систем раскрыты в следующих патентах США: 3715718; 3936796; 3958218; 3944968; 3947808; 3947810; 3934221; 3958219; 3925751; 3934222; 4060793; 4030065; 4215334 и 4319218, которые все являются собственностью заявителя настоящего изобретения (Honeywell) и включены здесь в качестве ссылки. Дополнительные примеры таких систем раскрыты в патентах США: 3349751; 3988713; 109777; 4133323; 4495483; 4684948; 4849756; 4857923; 4914436; 5366682; 5196847; 5220322; 5428354; 5781126 и 6157891, которые все являются собственностью заявителя настоящего изобретения (Honeywell) и включены здесь в качестве ссылки.
Хотя вышеупомянутые описанные системы обеспечивают консультативные и предупреждающие сигналы в случае близости самолета к земле, такие системы формируют предупреждения, основанные на условиях полета самолета, без использования навигационной информации. Следовательно, чувствительность этих систем отрегулирована так, чтобы обеспечить адекватные предупреждения, когда возникает опасное условие полета без формирования ложного предупреждения, когда нет никакой опасности.
Одна попытка устранения некоторых из ложных предупреждений при пролете над земной поверхностью, уникальной по своим конкретным географическим особенностям, которые требуют более раннего оповещения, состояла в изменении формы сигналов предупреждений системы предупреждения опасного сближения с землей в соответствии с географическим местоположением самолета, чтобы оптимизировать критерии предупреждения для конкретной географической области, над которой летит самолет. Пример такой системы описан в патенте США 4567483, который выдан заявителю настоящего изобретения и включен здесь в качестве ссылки. В системе, раскрытой в патенте США 4567483, критерии предупреждения оптимизированы так, чтобы соответствовать характеристикам земли в некоторых ограниченных областях, в частности характеристикам конкретных аэропортов, где имели место ложные предупреждения и другие проблемы.
Другой подход, в котором используется географический вход, раскрыт в патенте США 4224669, который включен здесь в качестве ссылки и в котором используется устройство памяти, чтобы хранить данные о минимальных безопасных высотах над областями с определенными географическими координатами. В такой системе для определения положения самолета используется навигационный компьютер, и предупреждение выдается, если самолет опускается ниже хранимой в памяти безопасной минимальной высоты для конкретной области, над которой пролетает самолет. Данная система включает режим "наихудшего случая" и "тактический" режим работы. В режиме "наихудшего случая" минимальная безопасная высота определяется как функция самой высокой точки земли или препятствия в пределах географической области с координатами, представляющими интерес. В "тактическом" режиме работы текущие условия полета типа положения самолета, крейсерской скорости и наземной траектории используются для определения минимальной безопасной высоты, основанной на высоте земли и препятствий непосредственно по курсу полета.
Американский патент 4675823, который является собственностью правопреемника настоящего изобретения и включен здесь в качестве ссылки, раскрывает систему предупреждения опасного сближения с землей, в которой используются данные географического положения, чтобы ввести в действие критерии предупреждения в соответствии с особенностям земной поверхности конкретных географических областей. Определение местонахождения самолета в пределах конкретной географической области обеспечивается тем, что мир разделяется на полосы широты, которые, в свою очередь, подразделяются на неперекрывающиеся зоны заданными линиями долготы, причем положение каждой зоны определяется координатами широты и долготы одного из их углов. В свою очередь, зоны определяются областями, которые могут перекрывать другие зоны. Области ограничены по размеру, и их положения также определяются местоположениями одного из их углов. Области дополнительно подразделяются на несколько географических участков, которые определяются их формой и местоположением в пределах области. Входы от навигационной системы самолета используются, чтобы определить, находится ли самолет в конкретной полосе широты, зоне, области и над участком поверхности, и выполняется установка критериев предупреждения, чтобы оптимизировать работу системы оповещения для области, над которой пролетает самолет. Над известной территорией делается "снимок" для проверки правильности барометрического сигнала высоты перед выполнением любого изменения критериев предупреждения.
Иначе говоря, мировая или географическая область, представляющая интерес, делится на полосы широты, которые дополнительно подразделяются на множество неперекрывающихся зон предопределенными линиями долготы. Каждая зона содержит область, которая имеет один или нескольких участков, в которых критерии предупреждения должны быть изменены. Каждая область ограничена по размеру до предопределенного числа градусов широты и долготы, но может перекрывать более одной зоны. Каждый участок в пределах области определяется его положением в пределах зоны и его формой, причем форма определяется в виде одной или нескольких стандартных фигур, типа прямоугольника, параллелограмма, треугольника, круга, сектора круга, эллипса или другой фигуры.
Вышеупомянутая информация хранится в памяти вместе с местоположением зон, областей и участков, определяемых одним углом зоны, области или участка соответственно, например юго-западная граница. Кроме того, области определяются размером и кодом, опознающим конкретную форму участка. Изменение критериев предупреждения, требуемых для каждого участка, также хранится в виде данных, показательных для других критериев, которые должны быть удовлетворены, прежде чем будет разрешено изменить критерии предупреждения.
Использование такого формата хранения информации уменьшает количество данных, требуемых для определения различных участков, и сокращает время вычислений, требуемое, чтобы определить, находится ли самолет над участком местности, который требует изменения критериев предупреждения. Сокращение времени хранения и вычисления осуществляется, сравнивая положение самолета с хранимыми в памяти данными сначала, чтобы определить положение самолета по отношению к полосе широты, затем к зоне, затем к области и затем, наконец, к участку. Например, широта самолета, определяемая навигационным оборудованием, сравнивается с границами широты одной из полос. Если она не находится в пределах этой полосы широты, положение сравнивается с границами широты следующей полосы, и т.д., пока не будет найдена правильная полоса. Затем текущая долгота самолета сравнивается с границами долготы двух смежных зон, как определено долготами двух соответствующих границ двух смежных зон. Это сравнение повторяется до тех пор, пока не будет определена текущая зона. После этого определяется, находится ли самолет в пределах области в данной зоне и, если это так, находится ли он в пределах участка в пределах данной области. Если самолет находится в пределах участка, как определено положением, размером и формой участка по отношению к области, выполняются соответствующие изменения в критериях предупреждения. Если имеется какая-либо неопределенность относительно местоположения самолета или какое-либо другое сомнение в правильности любого из навигационных сигналов или сигналов вертикального положения, не выполняется никаких изменений и используются стандартные критерии предупреждения.
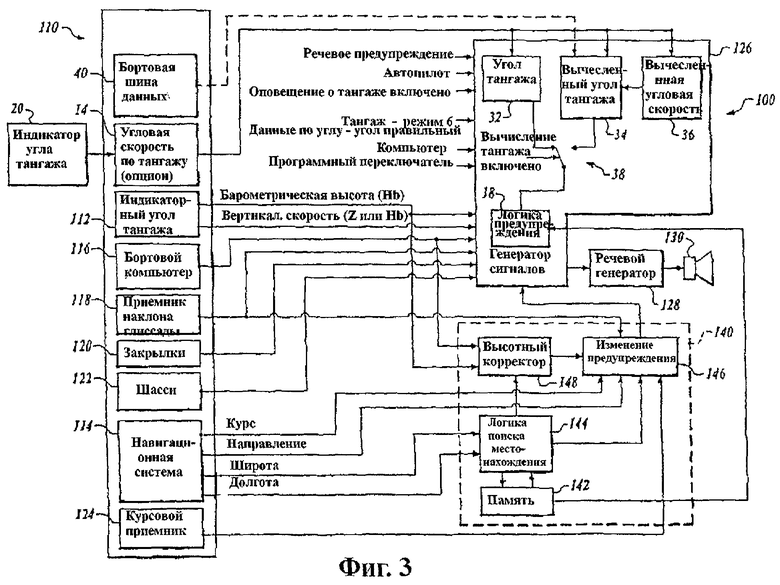
Фигура 3 представляет собой функциональную блок-схему, иллюстрирующую один вариант системы предупреждения опасного сближения с землей с определением географического участка и включающую устройство предупреждения об опасном угле тангажа 10 по настоящему изобретению, при этом система предупреждения опасного сближения с землей, в основном, обозначена позицией 100. Основная система предупреждения опасного сближения с землей 100 более подробно описана в вышеупомянутом патенте США 4675823. Как описано в патенте США 4675823, система предупреждения 100 согласно изобретению содержит шину данных самолета 110, которая формирует различные сигналы, подаваемые в систему предупреждения опасного сближения с землей. Подробное описание сигналов, обрабатываемых системой предупреждения опасного сближения с землей, приведено в публикации ARTNC, характеристика 429, издательства "Аэронавигационные радиосистемы", Annapolis, Md. Сигналы, передаваемые по шине данных самолета 110, включают: барометрические и радиосигналы высоты; сигнал вертикальной скорости; сигналы курса, маршрута, широты и долготы; радиосигнал наклона глиссады; сигналы положения закрылков и шасси и сигналы приемника курсового радиомаяка. Эти сигналы затем используются как входы логической схемы предупреждения, которая, в свою очередь, является эффективным средством для формирования консультативного или предупреждающего сигнала всякий раз, когда различные параметры полета указывают на то, что самолет находится в опасном положении по отношению к земле. Консультативный или предупреждающий сигнал может быть подан в генератор предупреждающих речевых сообщений, который, в свою очередь, формирует предупреждающие речевые сигналы, воспроизводимые громкоговорителем в кабине пилота.
Например, в системе предупреждения 100, представленной на фигуре 3, используются данные от вычислителя воздушных параметров 112 или от барометрического высотомера и барометрической цепи скорости, установленных на самолете, чтобы получить информацию о барометрической высоте самолета и вертикальной скорости самолета. Вертикальная скорость может быть выражена как степень изменения барометрического давления или как скорость Z, данные которой могут быть получены из бортовой инерционной навигационной системы. Из бортовой навигационной системы 114 также могут быть получены данные о курсе, направлении, широте и долготе самолета. Навигационные данные могут быть получены непосредственно от навигационной системы, которая может включать собственно инерционную навигационную систему, спутниковый приемник навигационной системы, низкочастотный приемник "Omega", систему "Loran С", всенаправленный курсовой радиомаяк УКВ-диапазона и дальномерное оборудование системы управления полетом. Кроме того, в системе предупреждения 100 используются сигналы от радиовысотомера 116, приемника наклона глиссады 118 и дискретные сигналы от дискретных узлов 120 и 122, которые указывают на положение закрылков и посадочного устройства. Также используются сигналы от курсового приемника 124, которые указывают, находится ли самолет на правильном курсе для приземления.
Система предупреждения 100 описана здесь как бортовое оборудование самолета; однако система предупреждения 100 также пригодна для использования в других транспортных средствах, которые должны управляться по отношению к местности или в воде, например в подводной лодке. Сигналы от вычислителя воздушных параметров 112, радиовысотомера 116, приемника наклона глиссады 118 и от дискретных узлов 120 и 122, отражающие состояние закрылков и посадочного устройства, подаются на логическую схему предупреждения или генератор предупредительной сигнализации 126. Генератор предупредительной сигнализации 126 может быть частью системы, в основном, известной как система предупреждения опасного сближения с землей. Примеры этих систем подробно описаны в вышеупомянутых патентах, в которых система выдает предупреждение, когда введенные в нее сигналы указывают на опасные условия полета. Как только обнаружено такое опасное условие, сигнал инициирования предупреждения подается на звуковой генератор 128, который выдает соответствующее речевое предупреждение либо непосредственно, либо через систему внутренней связи самолета на громкоговоритель 130, чтобы таким образом предупредить пилота об опасности.
Генератор предупредительной сигнализации 126 формирует предупреждение, когда система предупреждения 100 выдает информацию о различных опасных условиях полета. Среди опасных условий полета, которые могут вызвать создание предупреждения, можно отметить снижение самолета после отрыва от взлетно-посадочной полосы, недостаточную высоту над поверхностью земли, чрезмерно высокую вертикальную скорость, избыточную скорость снижения и малый наклон глиссады. Критерии для инициирования таких предупреждений определяются заранее заданными значениями составляющих в аналоговом генераторе предупредительной сигнализации и хранимыми в памяти данными в цифровых генераторах предупреждений, которые определяют критерии предупреждения в терминах, которые могут быть графически представлены как известные графы и как границы зоны предупреждения. Примеры таких границ зон предупреждения раскрыты в патенте США 3936796, который включен здесь в качестве ссылки.
Критерии предупреждения или границы зоны предупреждения системы предупреждения опасного сближения с землей структурированы так, чтобы максимизировать предупреждение по времени при сведении к минимуму числа ложных предупреждений. Однако невозможно приспособить границы зоны предупреждения так, чтобы они были оптимальными для всех складок местности, и, следовательно, большинство границ зон предупреждения являются результатом компромисса, который обеспечивает удовлетворительную работу системы для наиболее типичных условий полета, даже при том, что они не могут быть оптимизированы для некоторых конкретных географических областей. Таким образом, создается система 140, которая получает сигналы от навигационной системы 114, также как и другие сигналы, и изменяет критерии предупреждения или границы зоны предупреждения, используемые для инициализации предупреждений генератором предупредительной сигнализации 126 в соответствии с географическим местоположением самолета, чтобы оптимизировать границы зон предупреждения для особых характеристик земной поверхности, которые имеют место в некоторых предопределенных географических областях. Система 140 включает память 142, которая содержит положения и границы областей, которые требуют изменения границ зон предупреждения, также как и требуемые изменения предупреждений. Логика поиска местоположения 144 используется для контроля положения самолета, чтобы определить, находится ли самолет в области, которая требует изменения границ зоны предупреждения. Если самолет находится в такой области, логика 144 начинает изменение предупреждения через цепь изменения предупреждений 146, которая включает логику условия, которая запрещает изменение в случае, если не выполнены некоторые другие критерии. Вышеупомянутые другие критерии более подробно обсуждены в патенте США 4675823. Если имеются достаточно точные навигационные данные, можно использовать высотный корректор 148, чтобы скорректировать показания по барометрической высоте с тем, чтобы эти данные соответствовали показаниям высоты, полученным путем измерения высоты над местностью с помощью радиовысотомера. В противном случае изменения предупреждений могут просто быть запрещены в случае несоответствия барометрических данных о высоте данным радиовысотомера, полученным при полете над хорошо известной местностью.
Как описано выше, память 142 содержит местонахождения и границы областей, где желательны изменения границ зон предупреждения. Местоположение таких областей сравнивается с текущим положением самолета, и определяется, является ли изменение границ зоны предупреждения необходимым, а также характер такого изменения. Однако чтобы постоянно сравнивать текущее местоположение самолета с местоположениями каждой из областей, в которой требуется изменение границ зоны предупреждения, потребуется очень большой объем вычислений или слишком длительное время вычислений, которое будет несовместимо с физическим и временными требованиями системы предупреждения опасного сближения с землей. Следовательно, вместо того, чтобы хранить в памяти местоположения и границы областей, которые требуют изменения границ зоны предупреждения, мир делится на полосы широты, которые дополнительно разделены на зоны заданными линиями долготы, которые дополнительно разделены на области, которые могут содержать один или несколько участков, которые требуют изменения границ зоны предупреждения, как подробно описано в патенте США 4675823.
В известных системах предупреждения опасного сближения с землей критерии предупреждения или границы зоны предупреждения нормализованы, чтобы обеспечить практический баланс между выдачей пилоту своевременного предупреждения, когда самолет находится в опасной близости к земле, и, в то же самое время, обеспечить минимальное число ложных предупреждений. Ложное предупреждение - это предупреждение, сформированное системой предупреждения опасного сближения с землей, когда самолет занимает нормальное положение по отношению к земле и имеется лишь незначительная опасность внештатного приближения к земле. Однако рассматриваемые ложные предупреждения крайне нежелательны в том отношении, что они могут дезориентировать пилота и снизить его доверие к системе оповещения, что может окончиться тем, что пилот проигнорирует последующее предупреждение сближения с землей. В результате всегда считалось очень желательным свести к минимуму ложные предупреждения и, наоборот, максимально обеспечить подачу своевременных предупреждений, когда самолет подвержен некоторой фактической опасности столкновения с землей. Предыдущие попытки уменьшать ложные предупреждения состояли в создании оптимальных границ зон предупреждения для каждого типа местности, над которой пролетает самолет, с тем, чтобы один набор границ зон предупреждения обеспечивал баланс между ложными предупреждениями и фактическими предупреждениями во всем мире. Описания таких попыток обеспечения нормализованных границ зон предупреждения или критериев предупреждений для всех условий полета приведены в патентах США 3715718; 3934221; 3925751; 3958218; 4030065; 3944968; 4060793; 4215334; 3947808; 1319218; 3947810, которые были упомянуты выше, и в патентах 3946358; 3934222; 3922637 и 3947809, которые также включены здесь в качестве ссылки.
Американский Патент 4567483, который включен в настоящее описание в качестве ссылки, описывает множество различных границ зон предупреждения или критериев предупреждений для использования с системой предупреждения опасного сближения с землей на различных стадиях полета, чтобы уменьшить число ложных предупреждений и повысить эффективность реальных предупреждений, выдаваемых системой СПОС. Эти границы зон предупреждения или критерии предупреждения обычно называются режимами. Как описано в патенте США 4567483, критерии для формирования предупреждения требуются для некоторых участков конкретных аэропортов, чтобы принять во внимание рельеф местности на этих участках. Наряду с данными о положении, некоторые параметры полета, такие как курс, высота, наклон глиссады и отклонения от посадочной дорожки, контролируются системой, чтобы гарантировать то, что самолет находится в пределах участка желательного изменения предупреждения. Кроме того, система предупреждения опасного сближения с землей включает механизм для корректировки показателей барометрической высоты самолета в пределах приемлемых величин.
Как подробно описано и показано на чертежах в патенте США 4567483, границы зоны предупреждения или критерии предупреждения, используемые на различных стадиях полета, включают: границы зоны предупреждения или критерии предупреждения для барометрического режима вертикальной скорости снижения, который обычно упоминается, как режим 1; границы зоны предупреждения о скорости снижения, который обычно именуется как режим 2А; границы зоны предупреждения о скорости снижения при повышенной скорости воздушного потока, обычно упоминаемый как режим 2В; снижение самолета непосредственно после взлета, обычно именуемое как режим 3; два режима предупреждения минимальной высоты пролета над местностью, обычно именуемые как режим 4А и режим 4В; режим предупреждения о наклоне глиссады, обычно именуемый как режим 5, и режим 6, в котором выдаются сигналы тревоги и аварийный вызов при спуске самолета ниже предопределенных высот, минимальной отметки и приближения к такому минимуму.
Границы зоны предупреждения в отношении вертикальной скорости снижения режима 1 для системы предупреждения опасного сближения с землей и способ его формирования подробно описаны в патенте США 4060793. Кратко отметим, что вертикальная скорость снижения самолета измеряется по отношению к барометрической высоте в сравнении с высотой самолета над землей, измеренной с помощью радиовысотомера. Предопределенная взаимосвязь между вертикальной скоростью снижения и высотой, измеренной с помощью радиовысотомера, формирует речевое предупреждение о переходе к набору высоты; другие предопределенные взаимосвязи между барометрической вертикальной скоростью снижения и высотой, измеренной с помощью радиовысотомера, формируют речевое предупреждение о чрезмерной вертикальной скорости снижения. Как подробно описано в патенте США 4060793, большие значения барометрической вертикальной скорости снижения обрабатываются логикой системы предупреждения опасного сближения с землей для больших высот, измеренных радиовысотомером.
Границы зоны предупреждения о скорости снижения самолета в режимах 2А и 2В системы предупреждения опасного сближения с землей и способы их формирования подробно описаны в патенте США 4050793. Вкратце отметим, что режимы 2А и 2В служат для формирования предупреждений, когда скорость снижения самолета по отношению к земле, измеренная радиовысотомером, превышает допустимую величину для бортового радиовысотомера. Зона действия предупреждения в режиме 2А подробно описана в патенте США 3934221. Повышение скорости воздушного потока в режиме 2А подробно описано в патенте США 3958218. Режим 2В определен характеристикой 723 в документе в ARINC и обычно имеет рабочее ограничение между заданными пределами высоты над землей. Режим 2В обычно становится рабочим, только когда самолет заходит на посадку и переходит в режим 2А.
Границы зоны предупреждения о снижении после взлета в режиме 3 используются в системе предупреждения опасного сближения с землей, и способы их формирования подробно описаны в патенте США 3947810. В режиме 3 барометрическая потеря высоты сравнивается с высотой, измеренной бортовым радиовысотомером в предопределенных пределах.
В соответствии с границами зоны предупреждения в режимах 4А и 4В по отношению к высоте над местностью для системы предупреждения опасного сближения с землей, скорость самолета в узлах измеряется по показаниям радиовысотомера. Участок предупреждений в режиме 4А становится рабочим, когда самолет приближается к земле с убранными шасси. Участок предупреждений в режиме 4В становится рабочим, когда самолет находится слишком близко к земле с поднятыми закрылками. При скорости воздушного потока выше предопределенной величины выдается речевое предупреждение "слишком низко над землей" в режиме 4А и режиме 4В. Действия в режиме 4 подробно описаны в патенте США 4030065.
Границы зоны предупреждения наклона глиссады в режиме 5 являются сигналом измерения наклона глиссады в точках кривой, которая является индикатором углового отклонения самолета ниже глиссады по радиолучу бортового радиовысотомера. Различные заданные критерии предупреждения определяются для формирования предупреждения жесткого наклона глиссады и предупреждения мягкого наклона глиссады. Пример осуществления режима предупреждения о наклоне глиссады этого типа приведен в патенте США 3925751.
Режим 6 осуществляет выдачу отметок высоты по методике корпорации ARINC в рамках программы внедрения новых радиотехнологий в авиации, чтобы повысить безопасность и эффективность самолетовождения при движении самолета в районах аэропортов. В режиме 6 выдаются консультативные советы и аварийные сигналы при снижении самолета за пределы предопределенных высот, установки минимумов и приближения к минимумам. Частью режима 6 являются консультативные предупреждения при чрезмерном угле наклона или угле крена самолета, включая информацию о скорости сближения, которая обеспечивает более раннюю индикацию быстрого возникновения избыточного угла крена. Речевые аварийные сигналы "Угол крена" выдаются дважды и затем выключаются, за исключением случая, когда угол крена продолжает увеличиваться. Конкретные речевые сигналы определяются программой, выбираемой из заранее составленных меню. Консультативные речевые сигналы в режиме 6 и аварийный вызов по методике AJUNC 429 не сопровождаются визуальной индикацией.
Устройство предупреждения об опасном угле тангажа 10 по настоящему изобретению осуществлено как одно из устройств, работающих в режиме 6 аварийного оповещения, и обеспечивает подачу акустических аварийных сигналов в случае чрезмерного угла тангажа. Акустические аварийные сигналы "угол тангажа" могут подаваться непрерывно вплоть до того момента, когда угол тангажа оперативно уменьшен до предварительно заданных пределов. Альтернативно акустические аварийные сигналы выдаются дважды и могут быть отключены после того, как угол тангажа вошел в норму, например стал равен 20 процентам. Эта операция называется расширением границ зоны предупреждения или "периодическим" предупреждением и служит для уменьшения количества воспринимаемых пилотом звуковых сигналов.
В патенте США 4567483 предусмотрена модуляция границ зоны предупреждения, то есть изменения границ зон предупреждения в вышеупомянутых режимах, в результате чего достигается оптимальная работа системы предупреждения опасного сближения с землей в некоторых обозначенных областях без значительной потери общей эффективности системы предупреждения опасного сближения с землей.
Практическое осуществление системы предупреждения опасного сближения с землей, как описано в различных патентах, заключается в ряде усовершенствований системы, которые улучшили и оптимизировали начальную систему предупреждения опасного сближения с землей в пределах заданной зоны, чтобы облегчить конкретные условия полета вблизи аэропортов или при подлете к ним. Тем не менее такая система не охватывала некоторые особые случаи в силу недостаточной эффективности известных систем предупреждения опасного сближения с землей. Большинство таких случаев относилось к потенциально ложным предупреждениям из-за горной местности около некоторых аэропортов, а также когда границы зоны защиты могли быть расширены, чтобы обеспечить защиту при резком спуске ниже траектории желательной глиссады.
Использование цифровых датчиков, бортового радиоэлектронного оборудования и, в частности, навигационного оборудования сделало возможным точно установить местоположение самолета по отношению к широте, долготе, высоте и направлению полета. Эти сигналы теперь лежат в основе оборудования новейших больших реактивных самолетов и передаются в систему предупреждения опасного сближения с землей через шину данных самолета 110.
Таким образом, система предупреждения опасного сближения с землей способна идентифицировать уникальные топографические особенности местности и точно определять, вошел ли самолет в такую зону. Эта информация вместе с соответствующими деталями курса полета может затем использоваться для настройки системы предупреждения опасного сближения с землей с тем, чтобы границы зоны предупреждения или режимы были совместимы с особенностями этой топографической области без ухудшения работы системы за пределами данной области.
Концепция ограничения границ зоны предупреждения системы опасного сближения с землей применима только к отдельным ситуациям, и она практически реализована в устройстве, раскрытом в патенте США 4567483. Во всех случаях, когда любое из условий, требуемых для установления особой ситуации, не выполнено или не совпадает по времени, работа системы предупреждения опасного сближения с землей возвращается в режим обычных границ зоны предупреждения, описанный выше.
В патенте США 4567483 описывается способ точного определения курса полета самолета и его положение по отношению к окружающей топографии. Эта информация используется для активизации изменяющихся параметров границ зоны предупреждения, которые наиболее применимы в силу особенностей данной местности и курса полета. Например, в патенте США 4567183 описана система предупреждения опасного сближения с землей для самолета, который включает источник сигналов, представляющих параметры полета самолета, логическую схему предупреждения для сравнения сигналов параметров полета и формирования сигнала предупреждения в ответ на заданные взаимосвязи между выбранными сигналами параметров полета; источник сигналов положения, определяющих положение самолета, и логику условия для изменения заданных взаимосвязей и формирования сигналов предупреждения, когда самолет находится в предопределенном местоположении предупреждения. Одной из особенностей системы является ключевая логика для сравнения, по меньшей мере, одного из сигналов параметров полета с заранее заданной величиной, когда самолет находится в одном из заданных положений предупреждения, и действует, чтобы запретить изменение заданных взаимосвязей, когда сравниваемый сигнал параметров полета не соответствует заранее заданной величине. Другой особенностью системы является наличие логики проверки высоты, которая реагирует на радиосигнал высоты и барометрический сигнал высоты, а также на сигнал положения. Эта логика формирует сигнал проверки высоты, представляющий собой уровень доверия к барометрической высоте самолета для определенного местоположения самолета.
В соответствии с вариантом изобретения, показанным на фигуре 3, работа устройства предупреждения об опасном угле тангажа 10 основана на работе логической схемы предупреждений или генератора предупредительной сигнализации 126, который заменяет процессор 12, в варианте, показанном на фигуре 1. Измеренный или индикаторный сигнал 14 угла тангажа самолета выдается указателем угла тангажа 20 по бортовой шине данных 110. Сигнал порогового угла 16 используется как предопределенный предел, введенный в программу алгоритма предупреждения опасного угла тангажа логической схемы предупреждения 18, или как величина, хранящаяся в памяти 142 системы предупреждения опасного сближения с землей 100. Измеренный или индикаторный сигнал 14 угла тангажа и сигнал порогового угла 16 являются входами алгоритма предупреждения опасного угла тангажа, используемого логической схемой предупреждения 18 как генератор предупредительных сигналов 126 системы предупреждения опасного сближения с землей 100. Индикаторный сигнал 14 угла тангажа самолета контролируется логической схемой предупреждения 18 с предопределенной частотой выборки и сравнивается с программным входом 16.
Альтернативно индикаторный сигнал 14 угла тангажа самолета пропускается через фильтр 32, чтобы уменьшить помехи, или проходит через цепь компенсации 34, в которой сигнал 14 фильтруется для снижения помех и компенсируется, как описано выше. Согласно одному варианту изобретения, показанному на фигуре 3, в алгоритме предупреждения опасного утла тангажа логической схемы предупреждения 18 используется либо фильтрованный, но некомпенсированный индикаторный сигнал утла тангажа, полученный с выхода фильтра 32, либо фильтрованный и компенсированный индикаторный сигнал угла тангажа с выхода функционального блока компенсации 34. Согласно одному варианту изобретения индикаторный сигнал угла тангажа 14 выбирается либо из некомпенсированного индикаторного сигнала, либо из компенсированного индикаторного сигнала. Например, для соединения фильтра 32 или функционального блока компенсации 34 с логической схемой предупреждения 18 используется переключатель или штекерный разъем 38. Альтернативно этот выбор делается по заданной программе.
Компенсированный индикаторный сигнал угла тангажа с выхода функционального блока компенсации 34 включает коэффициент смещения, который используется для учета быстрых изменений угла тангажа самолета, который вычисляется как скорость изменения индикаторного сигнала угла тангажа 14. Индикаторный сигнал угла тангажа 14 подается на вход функционального блока угловой скорости по тангажу 36, который контролирует эту величину в течение предопределенного периода выборки и вычисляет угловую скорость по тангажу. Альтернативно угловая скорость по тангажу задается как сигнал "угловой скорости" 40, передаваемый по бортовой шине данных 110. Текущая угловая скорость по тангажу выдается либо как выход функционального узла скорости по тангажу 36, либо непосредственно как сигнал "угловой скорости" 40, передаваемый в блок компенсации 31 для вычисления компенсированного индикаторного сигнала угла тангажа, как описано выше. Таким образом, компенсация обеспечивает формирование индикаторного сигнала утла тангажа 14, используемого в алгоритме предупреждения логической схемы предупреждения 18, в частности, при наличии высокой угловой скорости по тангажу. Алгоритм, используемый логической функцией предупреждения 18, инициирует формирование сигналов предупреждении как функции разницы между программным входом 16 и индикаторным сигналом угла тангажа 14 самолета, который может быть выдан либо как фильтрованный, но некомпенсированный индикаторный сигнал утла тангажа с выхода фильтра 32, либо как фильтрованный и компенсированный индикаторный сигнал угла тангажа с выхода функционального блока компенсации 34. Если выбранный некомпенсированный или компенсированный индикаторный сигнал утла тангажа самолета превышает программный вход 16, сигнал инициирования предупреждения подается на звуковой генератор 128, который озвучивает соответствующее речевое предупреждение либо непосредственно, либо посредством передачи звуковых сигналов через систему внутренней связи самолета на громкоговоритель 130, чтобы таким образом оповестить пилота об опасной ситуации. Например, звуковой генератор 128 формирует акустический сигнал типа "Угол тангажа, Угол тангажа", который передается через громкоговоритель 130, если индикаторный угол тангажа 14 превышает порог 16.
Система предупреждения опасного сближения с землей 100 может включать дополнительные конфигурируемые входы, которые подтверждают достоверность сигнала инициирования предупреждения, подаваемого на звуковой генератор 128, и сводят к минимуму или полностью устраняют ложные предупреждения. Такие конфигурируемые входы включают: пороговый угол оповещения 16; сигнал включения компенсации угла тангажа; сигнал прироста угловой скорости по тангажу G; сигнал включения автопилота; непрерывные или периодические сигналы предупреждений. Пороговый угол оповещения 16 конфигурируется в зависимости от типа самолета.
Другие дополнительные входы узла оповещения об угле тангажа системы предупреждения опасного сближения с землей 100 в соответствии с изобретением могут быть полезны для уменьшения или полного устранения ложных предупреждений. Один входной сигнал "предупреждение об опасном угле тангажа" задается программным переключателем для подтверждения того, что устройство предупреждения об опасном угле тангажа 10 включено. Другой входной сигнал "достоверный угол тангажа" служит для контроля и сообщения о непрерывной величине сигнала индикаторного угла тангажа 14 с выхода указателя угла тангажа 20. Еще один входной сигнал "конфигурация программного переключателя" служит для контроля и сообщения о правильности конфигурации программного переключателя. Сигнал "Отказ компьютера" непрерывно контролирует работу генератора предупредительных сигналов 126, который использует алгоритм предупреждения опасного угла тангажа. Как обсуждено выше, некоторые из этих дополнительных входов помогают определить, как устройство предупреждения об опасном угле тангажа 10 взаимодействует с бортовой системой предупреждения опасного сближения с землей (СПОС), включая улучшенную систему предупреждения опасного сближения с землей (УСПОС).
Как описано выше, устройство предупреждения об опасном угле тангажа 10 может быть выполнено как одно из устройств, работающих в режиме 6, и имеет присущие ему ограничения. Дополнительно, узел предупреждения об опасном угле тангажа системы предупреждения опасного сближения с землей 100, в соответствии с изобретением, может быть выключен в критических условиях, чтобы избежать вмешательства в другие предупреждения, которые связаны с непосредственной опасностью столкновения с землей. Следовательно, генератор предупредительной сигнализации 126, который содержит устройство предупреждения об опасном угле тангажа по настоящему изобретению, включает дополнительный механизм установления приоритетов, т.е. команды или подпрограммы, которые запрещают инициирование акустических сигналов предупреждения, относящихся к "Положениям по тангажу", когда имеют место различные опасные условия полета, которые заставляют генератор предупредительной сигнализации 126 инициировать другие предупреждения. Например, механизм установления приоритетов используется генератором сигналов предупреждения 126 или встраивается в логику условия, используемую цепью изменения предупреждений 146 для изменения заданных взаимосвязей при формировании предупредительных сигналов, когда самолет находится в предопределенном местоположении, как обсуждено выше и подробно описано в вышеупомянутом патенте США 4567483. Как обсуждено выше, такие опасные условия полета, которые могут вызвать инициирование предупреждений, включают снижение самолета после взлета, недостаточное расстояние от поверхности земли, чрезмерно высокую вертикальную скорость снижения, большой угол закрылков и недопустимый наклон глиссады. В частности, сигналы предупреждения по углу тангажа по настоящему изобретению подавляются, когда возникают такие опасные условия полета, которые заставляют генератор предупредительной сигнализации 126 инициировать один или несколько предупреждений по вертикальной скорости снижения в режиме 1 или предупреждение по скорости сближения в режиме 2А или режиме 2В, снижение после взлета в режиме 3, предупреждение о минимальной высоте пролета над местностью в режиме 4А и 4В и предупреждение о наклоне глиссады в режиме 5. Механизм установления приоритетов может также подавлять сигналы предупреждения по тангажу, если возникают опасные условия полета, которые заставляют генератор предупредительной сигнализации 126 инициировать один или несколько предупреждений о минимальной высоте в режиме 6 и, произвольно, консультативные предупреждения о чрезмерном угле поперечного или продольного крена, которые также предусмотрены как часть режима 6. Таким образом, система предупреждения опасного сближения с землей 100 в соответствии с изобретением обеспечивает сведение к минимуму или полное устранение сигналов предупреждения по углу тангажа, формируемых устройством 10 в соответствии с изобретением, которые используется генератором сигналов предупреждения 126.
Хотя выше был описан и показан на чертежах только предпочтительный вариант изобретения, специалистам ясно, что могут быть сделаны различные модификации устройства по настоящему изобретению, не выходя из духа и объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Система предупреждения | 1976 |
|
SU797615A3 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНОСТИ ЦУНАМИ | 2020 |
|
RU2735952C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| ТРЕХМЕРНЫЙ ДИСПЛЕЙ БОКОВОГО ОТКЛОНЕНИЯ | 1996 |
|
RU2173660C2 |
Изобретение относится к области приборостроения и может быть использовано в навигационных приборных системах для предупреждения опасного сближения с землей. Технический результат - повышение точности формирования упреждающих навигационных сигналов. Для достижения данного результата устройство дополнительно содержит логическую схему предупреждения, имеющую вход, на который подается сигнал, представляющий собой индикаторный угол тангажа самолета. При этом логическая схема предупреждения служит для определения разницы между сигналом угла тангажа и величиной упреждающего сигнала, формируемого на основе предопределенной пороговой величины. Кроме этого, генератор предупредительной сигнализации соединен с выходом логической схемы предупреждения, при этом генератор предупредительной сигнализации используется для формирования индикаторного сигнала предупреждения как функции разницы между этими двумя сигналами. 6 н. и 33 з.п. ф-лы, 3 ил.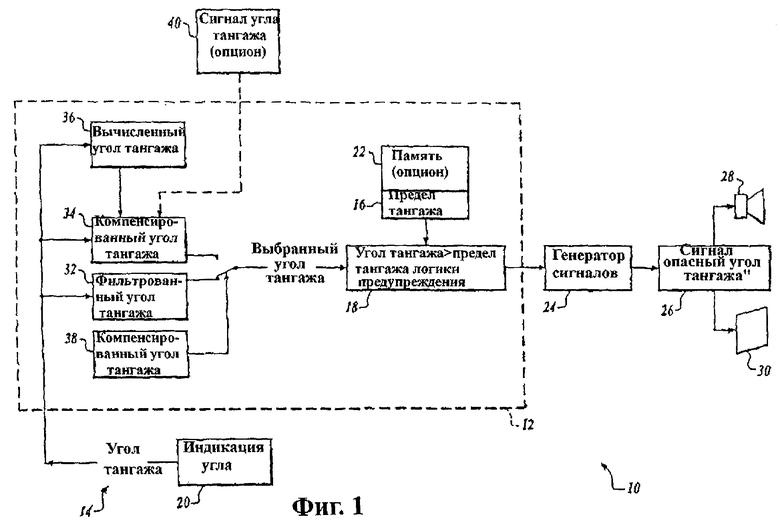
логическое средство условия, оперативно соединенное с логическим средством предупреждения и с источником сигналов положения для изменения заданных взаимосвязей, когда самолет находится в предопределенном местоположении предупреждения.
| US 6192305 B1, 20.02.2001 | |||
| US 4910513 А, 20.03.1990 | |||
| US 4567483 А, 28.01.1986 | |||
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| DE 3200004 A1, 14.07.1983 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |

