Настоящее изобретение относится к способу и устройству, способствующим пилотированию самолета, в частности транспортного самолета, на стадии захода на посадку для приземления на взлетно-посадочную полосу аэропорта.
Известно, что существенная доля несчастных случаев происходит с самолетом на стадии захода на посадку для приземления. Основные причины несчастных случаев относятся, в основном, к:
- непредвиденным метеорологическим условиям,
- несоответствующей реакции пилотов,
- неоптимальной аэродинамической конфигурации самолета,
- нестабильному заходу на посадку самолета (который находится слишком высоко и/или движется слишком быстро).
В большинстве случаев, если команды самолета осведомлены о том, что реальная ситуация для их самолета не позволяет выполнить приземление в условиях высокой безопасности, то они способны избегать указанных инцидентов посредством выполнения ухода на второй круг. Также известно, что уход на второй круг, по сути, является сложным маневром, который часто выполняют слишком поздно, так что он является нежелательным. Фактически, уход на второй круг продолжает рассматриваться, как неудача пилотов. Следовательно, пилоты, в основном, будут стремиться максимально избегать его, при необходимости пробуя исправить трудную ситуацию.
Однако, если бы такой маневр ухода на второй круг выполняли умышленно каждый раз, когда это необходимо, то это позволяло бы избегать многочисленных инцидентов и несчастных случаев, которые происходят на стадии посадки (захода на посадку на взлетно-посадочную полосу и посадки на эту взлетно-посадочную полосу).
Настоящее изобретение относится к способу, который способствует пилотированию самолета на стадии захода на посадку для приземления, и, более точно, к способу, который способствует управлению энергией при заходе на посадку, который способствует пилоту при выборе им решения относительно того, прервать ли стадию захода на посадку маневром ухода на второй круг, в частности, посредством указания ему всех запасов энергии для достижения устойчивого захода на посадку.
Для этой цели согласно изобретению упомянутый способ характеризуется тем, что выполняют автоматически и повторно следующий ряд последовательных этапов:
a) определяют текущие условия полета самолета,
b) определяют минимальное расстояние захода на посадку, которое соответствует минимальному расстоянию между проекцией на горизонтальную плоскость текущей позиции самолета и позицией контакта с землей, с помощью упомянутых текущих условий полета и предварительно определенной модели, когда самолет спускается и замедляется в соответствии с оптимизированным заходом на посадку для достижения стабильных условий захода на посадку,
c) представляют пилоту самолета, по меньшей мере, указанное минимальное расстояние захода на посадку на навигационном экране вида ND ("Навигационный Дисплей") в виде первой дуги окружности, которая центрирована в позиции, относящейся к самолету, и которая иллюстрирует позицию контакта с землей (и обеспечивает сетку расстояния). Упомянутая позиция, относящаяся к самолету, соответствует позиции, которую занимает самолет, если он расположен на предписанной траектории для приземления или, по умолчанию, к текущей позиции упомянутого самолета.
Соответственно, на основании изобретения в любой момент времени пилот, если он осуществляет оптимизированный заход на посадку, для которого горизонтальное расстояние от текущей позиции самолета до позиции контакта самолета с взлетно-посадочной полосой является наименьшим возможным, имеет информацию о позиции контакта своего самолета с землей (и, следовательно, его ограничения в отношении взлетно-посадочной полосы), как о функции, в частности, аэродинамических возможностей торможения самолета (учитываемых в упомянутой модели) и текущих условий полета.
Предпочтительно, на этапе c) на упомянутом навигационном экране дополнительно представляют символ, который иллюстрирует позицию взлетно-посадочной полосы приземления, намеченной для приземления, и который указывает, по меньшей мере, порог этой взлетно-посадочной полосы приземления, упомянутая первая дуга окружности расположена на боковой траектории самолета, на которой, как предполагается, также будет расположен упомянутый символ, иллюстрирующий позицию взлетно-посадочной полосы приземления.
Соответственно, когда на упомянутом навигационном экране упомянутая первая дуга окружности переходит упомянутый порог взлетно-посадочной полосы приземления, иллюстрированный этим символом, пилот получает информацию о том, что для него будет невозможно достигнуть стабильных условий захода на посадку для выполнения приземления на упомянутой взлетно-посадочной полосе приземления, пока он не изменит свой боковой профиль.
Согласно изобретению упомянутые стабильные условия захода на посадку предполагают, что самолет показывает предварительно определенную скорость захода на посадку и имеет определенный наклон захода на посадку, которые стабильны (то есть постоянны) при предварительно определенной высоте относительно земли, например 500 футов (около 150 метров) или 1000 футов (около 300 метров), до высоты, например, 50 футов (около 15 метров) в непосредственной близости от взлетно-посадочной полосы приземления.
Следовательно, на основании упомянутой первой дуги окружности и упомянутого символа, представленных на навигационном экране, пилоту предоставляется существенная помощь при принятии им решения относительно возможности прервать стадию захода на посадку, так как на основании этой информации он знает, когда заход на посадку является нестабильным и невосстанавливаемым. В такой ситуации он не должен долее сомневаться относительно выполнения маневра ухода на второй круг (или маневра гашения энергии). Это без сомнения позволит избегать многочисленных инцидентов и несчастных случаев на стадии захода на посадку и лучше управлять заходом на посадку для уменьшения количества случаев ухода на второй круг.
Чтобы должным образом информировать пилота о любой критической ситуации вышеупомянутого вида, предпочтительно, испускают аварийный сигнал в кабине экипажа самолета, когда упомянутая первая дуга окружности расположена за порогом взлетно-посадочной полосы приземления (относится к текущей позиции самолета), то есть когда позиция точки контакта самолета (относится к оптимизированному заходу на посадку, такому как предварительно упомянутый) расположена за упомянутым порогом взлетно-посадочной полосы приземления так, что приземление не может быть выполнено вообще или, по меньшей мере, не может быть выполнено при хороших условиях безопасности.
В одном варианте осуществления на этапе a) определяют, по меньшей мере, следующее (более точно, оценивают или измеряют обычным образом) в качестве текущих условий полета самолета:
- высоту самолета относительно земли,
- скорость самолета,
- аэродинамическую конфигурацию упомянутого самолета.
Кроме того, предпочтительно, упомянутая модель, предназначенная для определения минимального расстояния захода на посадку, как функции текущих условий полета, содержит нейронную сеть. В этом случае, предпочтительно, упомянутая нейронная сеть определяет упомянутое минимальное расстояние захода на посадку, как функцию упомянутых текущих условий полета и упомянутых стабильных условий захода на посадку, а также, по меньшей мере, следующих параметров:
- атмосферного давления на уровне земли,
- массы самолета и
- мгновенного продольного ветра.
Кроме того, в определенном варианте осуществления упомянутая нейронная сеть зависит от вида упомянутого самолета, в частности от его аэродинамических характеристик и его выполнения. Это позволяет оптимизировать модель и настраивать ее для самолета, на котором осуществляют настоящее изобретение.
Дополнительно, упомянутую нейронную сеть определяют на предварительном этапе, до полета самолета.
Кроме того, предпочтительным образом, упомянутое минимальное расстояние захода на посадку определяют с учетом оптимального профиля снижения, как функции упомянутых текущих условий полета.
Кроме того, в другом варианте осуществления:
- на этапе b) определяют второе расстояние захода на посадку, которое соответствует расстоянию между проекциями на горизонтальную плоскость текущей позиции самолета и позиции контакта с землей, когда самолет опускается и замедляется в соответствии со стандартным заходом на посадку (в отношении аэронавигационных директив) для достижения стабильных условий захода на посадку,
- на этапе c) это второе расстояние захода на посадку представляют пилоту самолета на упомянутом навигационном экране в виде второй дуги окружности, которая центрирована в упомянутой позиции, относящейся к самолету, и которая иллюстрирует позицию контакта с землей (относится к стандартному заходу на посадку).
Настоящее изобретение также относится к устройству, которое способствует пилотированию самолета, в частности транспортного самолета, на стадии захода на посадку для приземления на взлетно-посадочную полосу аэропорта.
Согласно изобретению упомянутое устройство отличается тем, что содержит:
- первое средство для определения текущих условий полета самолета,
- второе средство для определения при помощи упомянутых текущих условий полета и предварительно определенной модели минимального расстояния захода на посадку, которое соответствует минимальному расстоянию между проекциями на горизонтальную плоскость текущей позиции самолета и позиции контакта с землей, когда самолет опускается и замедляется в соответствии с оптимизированным заходом на посадку для достижения стабильных условий захода на посадку,
- средство отображения для представления на навигационном экране, по меньшей мере, этого минимального расстояния захода на посадку в виде первой дуги окружности, которая центрирована в (вышеупомянутой) позиции, относящейся к самолету и которая иллюстрирует позицию контакта с землей.
Предпочтительно, упомянутое второе средство содержит нейронную сеть.
Кроме того, в определенном варианте осуществления упомянутое устройство в соответствии с изобретением дополнительно содержит средство тревоги, выполненное с возможностью испускать аварийный сигнал (слышимый и/или визуализированный) в кабине экипажа самолета, когда упомянутая первая дуга окружности расположена за порогом взлетно-посадочной полосы приземления, намеченной для приземления.
Фигуры чертежа должны пояснять способ, в соответствии с которым может быть выполнено изобретение. На этих фигурах идентичными ссылками обозначены подобные элементы.
Фиг.1 является схематическим изображением устройства, которое способствует пилотированию, согласно изобретению.
Фиг.2 изображает навигационный экран, содержащий информацию, представляемую согласно настоящему изобретению.
Фиг.3-5 представляют часть навигационного экрана фиг.2 соответственно для различных стадий захода на посадку.
Фиг.6 является графической иллюстрацией различных возможных траекторий захода на посадку согласно настоящему изобретению, по которым может следовать самолет для приземления на взлетно-посадочную полосу приземления.
Устройство 1 согласно изобретению, представленное схематично на фиг.1, способствует пилоту в пилотировании самолета A, в частности транспортного самолета с широким корпусом, во время захода на посадку на взлетно-посадочную полосу 2 для приземления на этой взлетно-посадочной полосе 2.
Согласно изобретению упомянутое устройство 1 содержит:
- набор 3 источников информации, которые содержат, по меньшей мере, средство 4 для определения, в частности для измерения или оценки обычным образом, текущих условий полета самолета A. Более точно, упомянутое средство 4 определяет, по меньшей мере, следующие текущие условия полета:
высоту самолета А относительно земли,
скорость самолета A,
аэродинамические конфигурации (в частности, позиции предкрылок и закрылок) упомянутого самолета A,
- центральный блок 5, который соединен посредством линии 6 связи с упомянутым набором 3 источников информации и который определяет при помощи текущих условий полета, принятых из упомянутого средства 4, и предварительно определенной модели, описанной ниже, минимальное расстояние захода на посадку Dmin, которое соответствует минимальному расстоянию (профиль, доступный пилоту) между первой и второй проекциями на горизонтальную плоскость, с одной стороны, текущей позиции самолета А и, с другой стороны, позиции контакта с землей упомянутого самолета A, когда последний спускается и замедляется из своей текущей позиции, в соответствии с оптимизированным заходом на посадку, определенным ниже, для достижения стабильных условий захода на посадку, также определенных далее,
- средство 7 отображения, которое соединено посредством линии 8 связи с упомянутым центральным блоком 5 и которое предназначено для представления на обычном навигационном экране 9 вида ND ("Навигационный Дисплей"), по меньшей мере, указанного минимального расстояния захода на посадку Dmin в виде дуги окружности C1, которая центрирована в позиции, относящейся к самолету A. Упомянутая позиция, относящаяся к самолету, соответствует позиции, в которой находится самолет, если он расположен на предписанной траектории для приземления, или, по умолчанию, к текущей позиции упомянутого самолета A, иллюстрируемой обычно символом 10. Указанная дуга окружности C1 отделена от упомянутого символа 10 на расстояние, представляющее указанное расстояние Dmin. Эта дуга окружности C1 изображает позицию контакта самолета А с землей, если он выполняет оптимизированный заход на посадку, обеспечивающий возможность получения наименьшего возможного расстояния Dmin. Средство отображения также обеспечивает пилота информацией относительно расстояния (самолет - позиция контакта).
Соответственно, на основании упомянутого устройства 1 в любой момент времени пилот имеет информацию относительно позиции контакта своего самолета А с землей, если он осуществляет оптимизированный заход на посадку, для которого горизонтальное расстояние от текущей позиции самолета до позиции контакта самолета А с взлетно-посадочной полосой 2 является минимально возможным, как функцию, в частности, аэродинамических возможностей торможения самолета (учитываемых в упомянутой модели) и текущих условий полета (принятых из упомянутого средства 4).
Согласно изобретению упомянутое средство 7 отображения представляет, кроме того, на упомянутом навигационном экране 9 символ 11, который иллюстрирует позицию взлетно-посадочной полосы 2, намеченной для приземления самолета А, и который сообщает, по меньшей мере, позицию переднего края 12 упомянутой взлетно-посадочной полосы 2 приземления. Согласно изобретению упомянутая дуга окружности C1 расположена по определению на боковой траектории 13, которой следует самолет и которая проходит через упомянутый символ 11 на навигационном экране 9 для направления самолета к взлетно-посадочной полосе 2 приземления.
Следовательно, когда на упомянутом навигационном экране 9 упомянутая дуга окружности С1 переходит передний край 12 взлетно-посадочной полосы (символ 11), пилот имеет информацию, что для него будет невозможным достижение стабильных условий захода на посадку для выполнения приземления на взлетно-посадочной полосе 2 приземления, если (возможно) он не изменит свой боковой профиль.
Соответственно, на основании упомянутой дуги окружности С1 и упомянутого символа 11, представленных на навигационном экране 9, устройство 1 согласно изобретению предоставляет пилоту существенную помощь при принятии им решения относительно возможного прерывания стадии захода на посадку, так как на основании этой информации он имеет информацию, когда заход на посадку является нестабильным и невосстанавливаемым. В такой ситуации он далее не должен сомневаться относительно выполнения маневра ухода на второй круг. Это, без сомнения, делает возможным избежать многочисленных инцидентов и несчастных случаев на стадии захода на посадку.
По определению, уход на второй круг является стадией полета, при которой действия приземления не достигают завершения.
В варианте осуществления:
- упомянутый центральный блок 5 определяет расстояние DO захода на посадку, которое соответствует расстоянию между первой и третьей проекциями на горизонтальную плоскость, с одной стороны, текущей позиции самолета А и, с другой стороны, позиции контакта с землей, когда самолет А спускается и замедляется из своей текущей позиции, в соответствии со стандартным заходом на посадку (то есть в соответствии с заходом на посадку, который выполняют регулярно и обычным образом) для достижения стабильных условий захода на посадку,
- упомянутое средство 7 отображения представляет на упомянутом навигационном экране 9 это расстояние DO захода на посадку в виде дуги окружности C2, которая также центрирована в вышеупомянутой позиции, относящейся к самолету (символ 10), и которая иллюстрирует позицию контакта с землей для стандартного захода на посадку для данного случая.
Согласно изобретению упомянутые стабильные условия захода на посадку предполагают, что самолет A показывает предварительно определенные скорость захода на посадку и наклон захода на посадку, которые стабильны (то есть постоянны) при предварительно определенной высоте относительно земли, например 500 футов (около 150 метров) или 1000 футов (около 300 метров), до высоты, например, 50 футов (около 15 метров) в непосредственной близости к взлетно-посадочной полосе 2.
Посредством иллюстрации далее описаны три различные ситуации, представленные соответственно на фиг.3-5, которые изображают часть 14 навигационного экрана 9, содержащую, в частности, дуги окружности Cl и C2 и символ 11:
- в примере по фиг.3 дуги окружности Cl и C2 расположены в направлении вверх к краю 12 взлетно-посадочной полосы (символ 11) в направлении E полета самолета А, так что в этом примере самолет А может выполнять заход на посадку и в соответствии с оптимизированным заходом на посадку, и в соответствии со стандартным заходом на посадку,
- в примере по фиг.4 дуга окружности C1 (оптимизированный заход на посадку) расположена в направлении вверх к порогу 12 взлетно-посадочной полосы 2 приземления, в то время как дуга окружности C2 (стандартный заход на посадку) расположена за (в направлении вниз) упомянутым краем 12 взлетно-посадочной полосы 2. В этом примере самолет А не может выполнять стандартный заход на посадку. С другой стороны, остается возможным оптимизированный подход,
- в примере фиг.5 две дуги окружности С1 и C2 расположены за (в направлении вниз) краем 12 взлетно-посадочной полосы 2 приземления так, что ни стандартный заход на посадку, ни оптимизированный заход на посадку невозможны. Следовательно, в этом примере пилот должен осуществить маневр ухода на второй круг.
Средство 7 отображения представляет, кроме того, обычным образом, на навигационном экране 9, в частности:
- график 13, изображающий теоретическую траекторию полета самолета А в горизонтальной плоскости точками 15 курса,
- обычную градуировку 16 в угловых отклонениях,
- обычную градуировку 17 в расстоянии, определенном в отношении текущей позиции самолета А, иллюстрированной символом 10.
Устройство 1 согласно изобретению содержит, кроме того, средство 18 тревоги, которое соединено посредством линии 19 связи с упомянутым центральным блоком 5 и которое выполнено с возможностью испускать аварийный сигнал в кабине экипажа самолета A, когда упомянутая дуга окружности С1 расположена за краем 12 взлетно-посадочной полосы 2 (относится к текущей позиции самолета A), то есть когда позиция точки контакта самолета (относится к оптимизированному заходу на посадку, такому как обозначен ранее) расположена относительно края 12 взлетно-посадочной полосы 2 так, что приземление не может быть выполнено вообще или, по меньшей мере, не может быть выполнено при хороших условиях безопасности. Упомянутый аварийный сигнал может быть слышимым сигналом и/или визуализированным сигналом, в частности аварийным сообщением и/или изменением цвета или формы, имеющим отношение к информации, отображаемой на навигационном экране 9, такой как, например, дуга окружности С1 и/или символ 11.
Следовательно, посредством устройства 1 согласно изобретению пилоту доступны указания, которые обеспечивают возможность управления им энергией самолета А и, если это является соответствующим, выполнения коррекций состояния энергии или, если необходимо, выполнения ухода на второй круг. Соответственно, упомянутое устройство 1 делает возможным уменьшение количества инцидентов на стадии захода на посадку. Инцидентами, которые предотвращаются упомянутым устройством 1, являются, в частности, выходы за взлетно-посадочную полосу, трудные приземления, результаты нестабильных заходов на посадку, вызванные избыточной энергией (слишком высоко, слишком быстро). Кроме того, на основании изобретения возможно выполнение (в частности):
- мониторинга энергии на стадии захода на посадку между 10000 футами (около 3000 метров) и 500 футами (около 150 метров), 500 футов является крайней высотой для стабильности в соответствии с процедурой,
- содействия в решении относительно выполнения ухода на второй круг между 500 футами и 50 футами (около 15 метров), где самолет А должен быть стабилизирован при предварительно определенном наклоне захода на посадку (обычно 3°), формируя ось PA захода на посадку, выполняемую при предварительно определенной обычной скорости захода на посадку.
Дополнительно, упомянутую модель использует вычислительный модуль 20 центрального блока 5 для определения минимального расстояния захода на посадку Dmin. Таким образом, этот вычислительный модуль 20 содержит нейронную сеть. Предпочтительно, указанная нейронная сеть делает возможным определение упомянутого минимального расстояния захода на посадку Dmin, как функции упомянутых текущих условий полета и упомянутых стабильных условий захода на посадку, а также следующих параметров:
- атмосферного давления на уровне земли,
- массы самолета A,
- продольного мгновенного ветра.
Кроме того, в определенном варианте осуществления упомянутая нейронная сеть зависит от вида упомянутого самолета A, в частности от его характеристик и аэродинамического выполнения. Это делает возможным оптимизацию модели и применение ее для самолета А, на котором установлено устройство 1.
Согласно изобретению упомянутую нейронную сеть определяют на земле на предварительном этапе, до полета самолета A.
Кроме того, упомянутый вычислительный модуль 20 определяет упомянутое минимальное расстояние захода на посадку Dmin с учетом оптимального профиля спуска, как функцию упомянутых текущих условий полета самолета A.
На фиг.6 представлены различные профили (спуска), обозначенные ссылочными позициями с P0 по P4, которые делают возможным выполнение приземления на взлетно-посадочной полосе 2, перелетая через рельеф 21 окружающей территории 22, а также масштаб 23 высоты, сообщенные значения которого с H1 по H5, например, разделены каждый раз на 50 футов (около 15 метров). Упомянутые ссылочные позиции с P0 по P4 профилей являются оптимальными профилями потери энергии, которые охватывают все условия начальной высоты и скорости самолета A. Соответственно, центральный блок 5 в соответствии с упомянутыми условиями начальной высоты и скорости выбирает профиль потери энергии P0, P1, P2, P3, P4, который является оптимальным (который, в частности, делает возможным достижение наименьшего расстояния Dmin), и вычислительный модуль 20 использует упомянутый профиль для вычисления упомянутого расстояния Dmin в соответствии с упомянутой объединенной моделью.
Согласно фиг.6, на которой представлен самолет А, который следует стандартному профилю P0 спуска, можно предполагать, что:
- когда самолет находится в сглаженной конфигурации, он стремится выполнить спуск с обычной максимальной скоростью VLO (известной, как "Максимальная скорость функционирования механизма приземления") при сглаженной конфигурации, с механизмом приземления и выдвинутыми откидными закрылками, перед замедлением на вертикальной оси захода на посадку (профиль P1). Этой вертикальной осью захода на посадку является ось PA (называемая осью "планирующего спуска"), которая выдается в пределах структуры обычного захода на посадку по приборам и приземления вида ILS ("Система приземления по приборам"),
- когда самолет находится в конфигурации повышенной подъемной силы, он стремится выполнить спуск с обычной максимальной скоростью с выдвинутыми откидными закрылками VFE ("Максимальная скорость с выдвинутыми откидными закрылками") в конфигурации, называемой "ПОЛНАЯ", с механизмом приземления и выдвинутыми откидными закрылками, перед замедлением на вертикальной оси захода на посадку PA (профиль P2),
- когда самолет находится под высотой стандартной процедуры P0 (которая определена рельефом 21 территории 22 захода на посадку) и под вертикальной осью PA захода на посадку, самолет А выполняет пошаговые замедления, с механизмом приземления и выдвинутыми откидными закрылками, перед продолжением замедления на упомянутой вертикальной оси захода на посадку PA (профиль P4, который является неоптимальным профилем, но который поддерживает безопасность над рельефом),
- когда самолет находится под высотой стандартной процедуры, но выше вертикальной оси захода на посадку PA, спуск предпринимают в конфигурации повышенной подъемной силы при начальной скорости (если эта начальная скорость ниже скорости VFE "ПОЛНОЙ" конфигурации), с механизмом приземления и выдвинутыми откидными закрылками, перед замедлением на упомянутой вертикальной оси захода на посадку PA (профиль P3).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОМОЩИ В ПИЛОТИРОВАНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ ЭТАПА ЗАХОДА НА ПОСАДКУ С ЦЕЛЬЮ ПРИЗЕМЛЕНИЯ | 2007 |
|
RU2381563C1 |
| ТРЕХМЕРНЫЙ ДИСПЛЕЙ БОКОВОГО ОТКЛОНЕНИЯ | 1996 |
|
RU2173660C2 |
| Беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата | 2016 |
|
RU2712716C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
| СИСТЕМА НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2396515C2 |
Изобретение относится к области приборостроения и может быть использовано в системах управления летательными аппаратами (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит первое средство (4) для определения фактических условий полета самолета, второе средство (5) для определения фактических условий полета. При этом предварительно определяют или задают параметры шаблона или коридора полета ЛА, а именно минимального расстояния захода на посадку, соответствующего минимальному расстоянию между проекциями на горизонтальную плоскость фактической позиции самолета и точки касания земли. 4 н. и 11 з.п. ф-лы, 6 ил.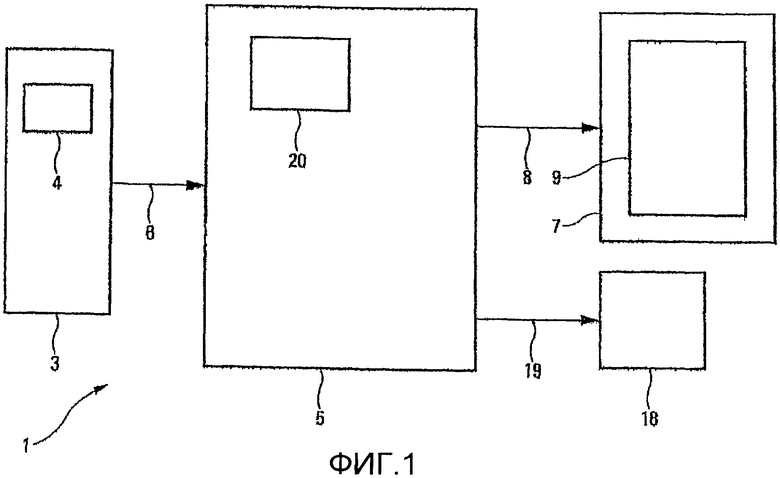
1. Способ, способствующий пилотированию самолета (А) на стадии захода на посадку для приземления, в соответствии с которым выполняют автоматически и повторно последующий ряд последовательных этапов:
a) определение текущих условий полета самолета (А),
b) определение минимального расстояния захода на посадку между текущей позицией самолета (А) и позицией контакта с землей, по меньшей мере, с учетом упомянутых текущих условий полета и
c) представление, по меньшей мере, этого минимального расстояния захода на посадку пилоту самолета (А) на навигационном экране (9), в котором:
на этапе b) упомянутое минимальное расстояние определяют с учетом упомянутых условий полета, а также предварительно определенной модели, которая учитывает аэродинамические возможности торможения самолета (А),
на этапе b) упомянутое минимальное расстояние определяют как минимальное расстояние между проекциями на горизонтальную плоскость текущей позиции самолета (А) и позиции контакта с землей, когда самолет (А) спускается и замедляется в соответствии с оптимизированным заходом на посадку для достижения стабильных условий захода на посадку, причем упомянутый оптимизированный заход на посадку является таким, что позволяет получить наименьшее возможное минимальное расстояние,
на этапе b) дополнительно определяют второе расстояние захода на посадку, которое соответствует расстоянию между проекциями на горизонтальную плоскость текущей позиции самолета (А) и позиции контакта с землей, когда самолет (А) спускается и замедляется в соответствии со стандартным заходом на посадку для достижения стабильных условий захода на посадку, и
на этапе с) пилоту самолета (А) на упомянутом навигационном экране (9) представляют одновременно:
указанное минимальное расстояние захода на посадку в виде первой дуги окружности (С1), которая центрирована в позиции (10), относящейся к самолету, и которая иллюстрирует позицию контакта с землей, относящуюся к оптимизированному заходу на посадку, и
указанное второе расстояние захода на посадку в виде второй дуги окружности (С2), которая центрирована в упомянутой позиции (10), относящейся к самолету, и которая иллюстрирует позицию контакта с землей, относящуюся к стандартному заходу на посадку.
2. Способ по п.1, в котором на этапе с) символ (11), который иллюстрирует позицию взлетно-посадочной полосы (2), намеченной для приземления, и который указывает по меньшей мере край (12) этой взлетно-посадочной полосы (2), представлен, кроме того, на упомянутом навигационном экране (9) и на указанной упомянутой первой дуге окружности (С1) расположен на боковой траектории (13) самолета (А).
3. Способ по п.1, в котором генерируют аварийный сигнал в кабине экипажа самолета (А), когда упомянутая дуга окружности (С1) расположена за порогом (12) взлетно-посадочной полосы (2) приземления.
4. Способ по п.1, в котором на этапе а) определяют, по меньшей мере, следующее в качестве текущих условий полета самолета (А):
высоту самолета (А) относительно земли,
скорость самолета (А) и
аэродинамическую конфигурацию упомянутого самолета (А).
5. Способ по п.1, в котором упомянутые стабильные условия захода на посадку предполагают, что самолет (А) имеет предварительно определенную скорость захода на посадку и наклон при заходе на посадку, которые стабильны при предварительно определенной высоте относительно земли.
6. Способ по п.1, в котором упомянутая модель предназначена для определения минимального расстояния захода на посадку как функции текущих условий полета и содержит нейронную сеть.
7. Способ по п.6, в котором упомянутая нейронная сеть определяет упомянутое минимальное расстояние захода на посадку как функцию упомянутых текущих условий полета и упомянутых стабильных условий захода на посадку, а также, по меньшей мере, следующих параметров:
атмосферного давления на уровне земли,
массы самолета (А) и
продольного мгновенного ветра.
8. Способ по п.6, в котором упомянутая нейронная сеть зависит от вида упомянутого самолета (А).
9. Способ по п.6, в котором упомянутую нейронную сеть определяют на предварительном этапе, до полета самолета (А).
10. Способ по п.1, в котором упомянутое минимальное расстояние захода на посадку определяют с учетом оптимального профиля спуска (РО-Р4) как функцию упомянутых текущих условий полета.
11. Устройство, способствующее пилотированию самолета на стадии захода на посадку для приземлений, при этом упомянутое устройство содержит:
первое средство (4) для определения текущих условий полета самолета (А),
второе средство (5) для определения минимального расстояния захода на посадку между текущей позицией самолета (А) и позицией контакта с землей, по меньшей мере, с учетом упомянутых текущих условий полета и
средство (7) отображения для представления по меньшей мере указанного минимального расстояния захода на посадку на навигационном экране (9),
в котором:
упомянутое второе средство (5), содержит:
средство для определения упомянутого минимального расстояния с учетом упомянутых условий полета и предварительно определенной модели, которая учитывает аэродинамические возможности торможения самолета (А), при этом упомянутое минимальное расстояние соответствует минимальному расстоянию между проекциями на горизонтальную плоскость текущей позиции самолета (А) и позиции контакта с землей, когда самолет (А) спускается и замедляется в соответствии с оптимизированным заходом на посадку для достижения стабильных условий захода на посадку, при этом упомянутый оптимизированный подход является таким, что обеспечивает возможность получения наименьшего возможного минимального расстояния, и
средство для определения второго расстояния захода на посадку, которое соответствует расстоянию между проекциями на горизонтальную плоскость текущей позиции самолета (А) и позиции контакта с землей, когда самолет (А) спускается и замедляется в соответствии со стандартным заходом на посадку для достижения стабильных условий захода на посадку, и упомянутое средство (7) отображения сформировано так, чтобы представлять для пилота самолета (А) на упомянутом навигационном экране (9) одновременно следующее:
указанное минимальное расстояние захода на посадку в виде первой дуги окружности (С1), которая центрирована в позиции (10), относящейся к самолету, и которая иллюстрирует позицию контакта с землей, относящуюся к оптимизированному подходу, и
указанное второе расстояние захода на посадку в виде второй дуги окружности (С2), которая центрирована в упомянутой позиции (10), относящейся к самолету, и которая иллюстрирует позицию контакта с землей, относящуюся к стандартному заходу на посадку.
12. Устройство по п.11, в котором упомянутое второе средство (5) содержит нейронную сеть.
13. Устройство по п.11, в котором, кроме того, средство (18) тревоги, выполненное с возможностью испускания аварийного сигнала в кабине экипажа самолета (А), когда упомянутая первая дуга окружности (С1) расположена за краем (12) взлетно-посадочной полосы (2) приземления, намеченной для приземления.
14. Самолет, в котором предусмотрено устройство (1), выполненное с возможностью осуществления способа по любому из пп.1-10.
15. Самолет, в котором предусмотрено устройство (1) по любому из пп.11-13.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5987371 A, 16.11.1999 | |||
| DE 3200004 A1, 14.07.1983 | |||
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |

