Изобретение относится к радиолокации и может быть использовано для подавления ретранслированных помех.
Известны устройства подавления негауссовских помех, представленные в [1-4]. Основным недостатком рассмотренных устройств является малая эффективность подавления нескольких одновременно воздействующих ретранслированных помех.
Из известных устройств подавления помех наиболее близким по технической сущности является устройство нелинейного подавления (НП) негауссовских помех, описанное в [4, стр.297-301], структурная схема которого приведена на фиг.1. Это устройство содержит последовательно включенные амплитудный детектор 1, нелинейный элемент 2, первый умножитель 4, второй вход которого соединен с выходом полосового ограничителя 3, вход которого соединен с входом амплитудного детектора 1. Выход первого умножителя 4 является выходом устройства нелинейного подавления негауссовских помех.
Устройство работает следующим образом. На входы амплитудного детектора 1 и полосового ограничителя 3 поступает аддитивная смесь отраженного от цели сигнала и ретранслированной помехи. Сигнал и помеха представляют собой пачку радиоимпульсов с одинаковой модуляцией. Они отличаются задержкой и (или) частотой. При этом отношение сигнал-помеха на входе устройства нелинейного подавления мало. В вероятностном описании помеха является негауссовской. Огибающая входной смеси с выхода амплитудного детектора 1 поступает на вход нелинейного элемента 2, амплитудная характеристика которого настроена под параметры помехи. В нелинейном элементе происходит подавление мощной негауссовской помехи, в то время как слабый сигнал проходит без значительного ослабления [4]. Огибающая, полученная с выхода нелинейного элемента 2, подается на вход первого умножителя 4. На его второй вход подается фазовый множитель с выхода полосового ограничителя 3. При аналоговой обработке сигнала он равен cos(wt+φ(t)), при цифровой - еjφ(t), где φ(t) - закон угловой модуляции входной смеси. На выходе первого умножителя 4 восстанавливается закон угловой модуляции сигнала. При этом отношение сигнал-помеха близко к единице. Выделение сигнала из его смеси с остатком помехи и комбинационными составляющими может быть обеспечено согласованным фильтром.
Недостатком такого устройства является то, что при воздействии нескольких помех с различными задержками и частотами их сумма образует близкий к гауссовскому случайный процесс, что сильно снижает эффективность работы нелинейного подавителя [4].
Техническим результатом изобретения является повышение эффективности подавления множества ретранслированных помех.
Сущность изобретения заключается в том, что в устройство нелинейного подавления негауссовских помех, содержащее последовательно включенные амплитудный детектор, нелинейный элемент, первый умножитель, второй вход которого соединен с выходом полосового ограничителя, вход которого соединен с входом амплитудного детектора, дополнительно введены последовательно включенные АЦП, первое запоминающее устройство, устройство весовой обработки, блок череспериодного БПФ, второе запоминающее устройство, обнаружитель помехи, устройство оценки амплитуды помехи, третий умножитель, согласованный фильтр, при этом к выходу обнаружителя помехи подключен первый вход второго умножителя, второй вход которого соединен со вторым выходом устройства оценки амплитуды помехи, выход второго умножителя соединен с входами амплитудного детектора и полосового ограничителя, выход первого умножителя соединен со вторым входом третьего умножителя, при этом второй выход обнаружителя помехи соединен с входом согласованного фильтра.
На фиг.2 представлена структурная схема предлагаемого устройства нелинейного подавления ретранслированных помех.
Устройство нелинейного подавления ретранслированных помех содержит последовательно включенные устройства: АЦП 5, первое запоминающее устройство 6, устройство весовой обработки 7, блок череспериодного БПФ 8, второе запоминающее устройство 9, обнаружитель помехи 10, устройство оценки амплитуды помехи 11, третий умножитель 13, согласованный фильтр 14, при этом к выходу обнаружителя помехи 10 подключен первый вход второго умножителя 12, второй вход которого соединен со вторым выходом устройства оценки амплитуды помехи 11, выход второго умножителя 12 соединен с последовательно включенными: амплитудным детектором 1, нелинейным элементом 2, первым умножителем 4, второй вход которого соединен с выходом полосового ограничителя 3, вход которого соединен с входом амплитудного детектора 1, выход первого умножителя 4 соединен со вторым входом третьего умножителя 13, второй выход обнаружителя помехи 10 соединен с входом согласованного фильтра 14, выход согласованного фильтра 14 является выходом устройства нелинейного подавления помех.
Устройство реализуется в цифровой форме и работает следующим образом. Аналоговый входной сигнал после оцифровки в АЦП 5 сохраняется в первом запоминающем устройстве 6. Каждый период повторения импульсов сохраняется в виде вектора-строки отсчетов. Время накопления импульсов в запоминающем устройстве 6 определяется заданным числом импульсов К. По истечении времени накопления с первого запоминающего устройства 6 считывается матрица отсчетов V для принятой пачки импульсов, где число строк матрицы равно числу импульсов в пачке K, число столбцов равняется числу отсчетов N, используемых на одном периоде повторения импульсов. Устройство весовой обработки 7 производит почленное перемножение матрицы V на матрицу W, столбцы которой содержат отсчеты окна Чебышева или Хемминга, что обеспечивает подавление боковых лепестков радиолокационного изображения (РЛИ) по оси частот. В РЛС с синтезированием апертуры (РСА) столбцы матрицы содержат также фазовые корректирующие множители для фокусировки РЛИ. Все столбцы матрицы W одинаковы (это является достаточным условием возможности выполнить сначала межпериодную обработку пачки импульсов, а потом выполнить внутриимпульсную обработку - согласованную фильтрацию). С выхода устройства весовой обработки 7 матрица отсчетов поступает на вход блока череспериодного БПФ, выполняемого по столбцам. Данная операция позволяет расфильтровать помехи по доплеровской частоте, что в дальнейшем позволит подавить их по отдельности. На выходе блока череспериодного БПФ образуется матрица Y=F{V·W}, где F{} - операция прямого БПФ, · - операция почленного перемножения матриц.
Матрица Y всегда является комплексной. Вид ее модуля при наличии помех показан на фиг.3. Здесь n - номер столбца (номер отсчета на периоде), k - номер строки (номер сдвига частоты). Число помех равно 3. Входной сигнал задан действительным, его спектр симметричен. Поэтому число импульсов помехи после межпериодного БПФ равно 6. При оцифровке квадратурного сигнала число импульсов помех на фиг.3 будет равно числу заданных помех с различными частотами. Оконная обработка снижает уровень боковых лепестков, но увеличивает протяженность импульсов помехи вдоль оси частот. Каждый из них накрывает до 4-6 строк матрицы Y. Помехи имеют различные задержки и частоты.
Полученная матрица Y сохраняется во втором запоминающем устройстве 9, а с его выхода подается на вход обнаружителя помехи 10. В каждой строке матрицы Y лежат отсчеты принятого сигнала с определенным значением доплеровского сдвига частоты. Это означает, что отсчеты импульсов помех с разными сдвигами частоты лежат в разных строках.
Обнаружитель помехи 10 анализирует строки матрицы Y на наличие мощной помехи, подлежащей подавлению. Для обнаружения помех производится пороговая обработка элементов центрального столбца y(k) матрицы Y, k=1…K. Для каждого элемента этого столбца рассчитывается значение огибающей:  . Затем отсчет огибающей сравнивается с порогом: A(k)>Apor. Если порог превышен, строка матрицы Y с номером k содержит мощную помеху и передается на первый выход обнаружителя помехи. В противном случае строка выдается на его второй выход и поступает на вход согласованного фильтра без нелинейной обработки.
. Затем отсчет огибающей сравнивается с порогом: A(k)>Apor. Если порог превышен, строка матрицы Y с номером k содержит мощную помеху и передается на первый выход обнаружителя помехи. В противном случае строка выдается на его второй выход и поступает на вход согласованного фильтра без нелинейной обработки.
Порог обнаружения Аpor=Smax·A2, где Smax - ожидаемое максимальное превышение сигнала цели над шумом после межпериодной обработки; А2 - медиана распределения массива отсчетов огибающей столбца A(k). Для оценки медианы выполняется сортировка отсчетов массива A(k) в порядке их возрастания. Медиана А2 равна значению центрального отсчета отсортированного массива.
При выборе порога предполагается, что сигнал и помеха присутствуют в малом числе строк матрицы Y (существенно меньше половины). Тогда значение А2 принадлежит отсчету шума, близко к значению медианы его распределения и мало зависит от амплитуды помехи. Это обеспечивает устойчивость обнаружения помех с разными амплитудами. Множитель Smax увеличивает порог так, чтобы сигнал от большой цели не мог быть принят за помеху и не подавлялся. Помехи с уровнем меньше порога также будут проигнорированы. Однако такие помехи не затрудняют обнаружение сигнала (не маскируют его боковыми лепестками функции неопределенности).
Пусть в k-й строке матрицы Y обнаружена помеха. Тогда ее отсчеты подаются на входы второго умножителя 12 и устройства оценки амплитуды помехи 11. Со второго выхода устройства оценки амплитуды 11 на второй вход второго умножителя 12 подается множитель  ,
,
где Amid - оценка амплитуды ретранслированной помехи для k-й строки матрицы Y, A0 - параметр амплитудной характеристики (АХ) нелинейного элемента, характеризующий переход его АХ через ноль. Вид оптимальной АХ определен в [4]. При цифровой реализации удобно аппроксимировать эту АХ параболой, вид которой показан на фиг.4. В этом случае A0=1.
Для оценки амплитуды помехи Аmid нельзя использовать амплитудный детектор, поскольку импульсом помехи может быть накрыта не вся обрабатываемая строка отсчетов. В этом случае гистограмма распределения отсчетов амплитуд k-й строки А(n) будет содержать два максимума, фиг.7. Первый максимум определяется отсчетами амплитуд сигнала и шума, не накрытыми импульсом помехи. Второй расположен в области больших значений амплитуд и определяется отсчетами амплитуд мощной помехи. Необходимо выделить множество отсчетов помехи по условию превышения порога А(n)>0,5·Amax, где Amax - максимальное значение амплитуды в k-й строке, n=1…N. Оценка амплитуды помехи Аmid равна среднему значению для полученного множества отсчетов амплитуд помехи.
Второй умножитель обеспечивает приведение среднего значения амплитуды помехи к уровню A0. После этого смесь сигнала и помехи подается на вход устройства НП (на вход амплитудного детектора и полосового ограничителя), который обеспечивает подавление помехи.
При реализации устройства НП в цифровом виде обработка производится для комплексной огибающей входного сигнала  . Тогда амплитудный детектор реализуется как расчет модуля:
. Тогда амплитудный детектор реализуется как расчет модуля:  , a полосовой ограничитель реализуется делением на огибающую
, a полосовой ограничитель реализуется делением на огибающую
где φ(n) - закон угловой модуляции входной смеси.
Амплитудная характеристика нелинейного элемента при A0=1 описывается параболой g(A)=A-A2, фиг.4. Можно рассчитать комплексную огибающую сигнала на выходе первого перемножителя

Это позволяет упростить цифровую реализацию устройства НП

Выражение описывает алгоритм работы амплитудного детектора, нелинейного элемента, полосового ограничителя и первого умножителя.
С выхода первого умножителя 4 сигнал  подается на первый вход третьего умножителя 13, на второй вход которого подается числовой множитель k1=2·Аmid/A0 с первого выхода устройства оценки амплитуды помехи 11. Он обеспечивает возврат уровня полезного сигнала на выходе НП к его уровню на входе. Коэффициент 2 учитывает двукратное ослабление сигнала цели в устройстве НП.
подается на первый вход третьего умножителя 13, на второй вход которого подается числовой множитель k1=2·Аmid/A0 с первого выхода устройства оценки амплитуды помехи 11. Он обеспечивает возврат уровня полезного сигнала на выходе НП к его уровню на входе. Коэффициент 2 учитывает двукратное ослабление сигнала цели в устройстве НП.
Сигнал с выхода третьего умножителя 13 подается на вход согласованного фильтра. В нем производятся внутриимпульсная обработка и выделение полезного сигнала из смеси с остатками помехи и комбинационными составляющими. Результат обработки подается на выход устройства нелинейного подавления ретранслированных помех.
Согласованный фильтр может быть реализован любым из известных способов. При цифровой реализации удобно использовать алгоритм быстрой свертки. Для этого в строке данных выполняется БПФ, затем полученный спектр умножается на комплексно-сопряженный спектр излученного импульса, затем выполняется обратное БПФ.
Строки матрицы Y поступают на вход согласованного фильтра одним из двух путей в зависимости от результатов работы обнаружителя помехи 10. При обнаружении помехи строка поступает после нелинейной обработки с выхода третьего умножителя 13. При отсутствии помехи - непосредственно со второго выхода обнаружителя помехи. Это позволяет исключить подавление сигнала цели при отсутствии помехи. Маршрут поступления строки данных задает обнаружитель помехи 10.
Таким образом, предлагаемое устройство позволяет раздельно подавить несколько ретранслированных помех, отличающихся доплеровским сдвигом частоты. На частотах, не накрытых помехой, производится стандартная согласованная фильтрация пачки импульсов, обеспечивающая максимальное отношение сигнал-шум.
Проведено математическое моделирование предложенного устройства нелинейного подавления ретранслированных помех. Моделировалась РЛС с зондирующим сигналом в виде когерентной пачки ЛЧМ-импульсов. В качестве исходных данных было задано: минимальная частота ЛЧМ-импульса на входе АЦП - 0,3 МГц, девиация частоты - 4,4 МГц, частота дискретизации - 10 МГц; период повторения импульсов - 150 мкс, длительность импульса - 37 мкс, число импульсов в пачке - 256. На каждом периоде обрабатывалось 512 отсчетов, из них 370 соответствуют длительности импульса. Число разрядов АЦП равно 12. Использовано окно Чебышева с глубиной подавления боковых лепестков 100 дБ.
Заданы два сигнала точечной цели с равными задержками и разными частотами, а также три помехи с различными частотами и задержками. Входное отношение сигнал-шум равно минус 10 дБ.
На фиг.5 показано сечение РЛИ по дальности. Отметки сигнала 15 и помехи 16 имеют одинаковые частоты. Отношение сигнал-помеха на входе равно минус 30 дБ. Выполнена только линейная обработка. Отметка сигнала превышает боковые лепестки помехи, но запас мал. При входном отношении сигнал-помеха, равном минус 40 дБ, сигнал уже не обнаруживается.
На фиг.6 показано то же сечение РЛИ после нелинейной обработки при входном отношении сигнал-помеха, равном минус 70 дБ. Видно, что отметка сигнала 15 превышает отметку помехи 16 и все ее боковые лепестки. Отметка 17 представляет собой комбинационную составляющую сигнала с помехой, совпадающих по частоте.
Благодаря применению устройства нелинейного подавления минимально обнаруживаемый уровень сигнала уменьшается на 40 дБ.
Все элементы предлагаемого устройства могут быть реализованы в цифровом виде, например на сигнальном процессоре или на программируемой логической матрице.
ЛИТЕРАТУРА
1. Патент США №4270223, Н04В 1/12.
2. Авторское свидетельство 1264815, заявл. 03.02.84, Н04В 1/10.
3. Авторское свидетельство 1311581, заявл. 11.03.85, Н04В 1/10.
4. Теория обнаружения сигналов /Под ред. П.А.Бакута. - М.: Радио и связь, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352063C1 |
| ОБНАРУЖИТЕЛЬ РАДИОИМПУЛЬСОВ | 1979 |
|
SU1840949A1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| Устройство для цифровой фильтрации на основе дискретного преобразования Фурье | 1990 |
|
SU1795475A1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| Способ подавления пассивных помех с малым доплеровским смещением | 2019 |
|
RU2729886C1 |
| Устройство обработки сложных сигналов | 1980 |
|
SU978092A1 |
| Адаптивное устройство подавления помех | 1990 |
|
SU1734215A1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| СИСТЕМА ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ | 1987 |
|
SU1840229A1 |
Изобретение относится к радиолокации и может быть использовано для подавления ретранслированных помех. Достигаемый технический результат изобретения - повышение эффективности подавления множества ретранслированных сигналов (помех) с различными задержками и сдвигами частоты, создаваемых постановщиком активных помех (АП). Указанный результат обеспечивается за счет того, что устройство нелинейного подавления ретранслированных помех (РП) содержит последовательно включенные амплитудный детектор, нелинейный элемент, первый умножитель, второй вход которого соединен с полосовым ограничителем, вход которого соединен с входом амплитудного детектора, а также содержит последовательно включенные аналого-цифровой преобразователь (АЦП), первое запоминающее устройство, устройство весовой обработки, блок череспериодного быстрого преобразования Фурье (БПФ), второе запоминающее устройство, обнаружитель помехи, устройство оценки амплитуды помехи, третий умножитель, согласованный фильтр, при этом к выходу обнаружителя помехи подключен первый вход второго умножителя, второй вход которого соединен со вторым выходом устройства оценки амплитуды помехи, выход второго умножителя соединен с входами амплитудного детектора и полосового ограничителя, выход первого умножителя соединен с первым входом третьего умножителя, второй вход третьего умножителя соединен с первым выходом устройства оценки амплитуды помехи, при этом второй выход обнаружителя помехи соединен с входом согласованного фильтра. 7 ил.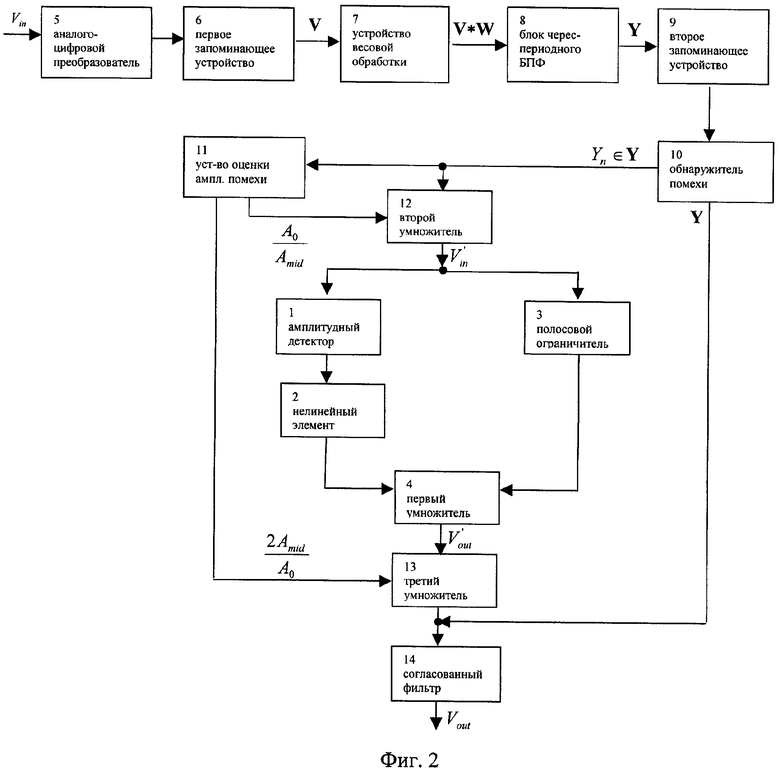
Устройство нелинейного подавления ретранслированных помех, содержащее последовательно включенные амплитудный детектор, нелинейный элемент, первый умножитель, второй вход которого соединен с выходом полосового ограничителя, вход которого соединен с входом амплитудного детектора, отличающееся тем, что дополнительно введены последовательно включенные аналого-цифровой преобразователь, первое запоминающее устройство, устройство весовой обработки, блок череспериодного быстрого преобразования Фурье (БПФ), второе запоминающее устройство, обнаружитель помехи, устройство оценки амплитуды помехи, третий умножитель, согласованный фильтр, при этом к выходу обнаружителя помехи подключен первый вход второго умножителя, второй вход которого соединен со вторым выходом устройства оценки амплитуды помехи, выход второго умножителя соединен с входами амплитудного детектора и полосового ограничителя, выход первого умножителя соединен со вторым входом третьего умножителя, второй выход обнаружителя помехи соединен с входом согласованного фильтра, выход которого является выходом устройства нелинейного подавления ретранслированных помех.
| Теория обнаружения сигналов | |||
| Под ред | |||
| БАКУТА П.А | |||
| - М.: Радио и связь, 1984, с.297-301 | |||
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 2001 |
|
RU2188503C1 |
| Устройство подавления помех | 1988 |
|
SU1589403A1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ И ИМПУЛЬСНЫХ ПОМЕХ | 1996 |
|
RU2115237C1 |
| US 4757265 A, 12.07.1988 | |||
| US 5564095 A, 08.10.1996 | |||
| US 6072845 A, 06.06.2000 | |||
| US 5729576 A, 17.03.1998. | |||

