Изобретение относится к области судовых движителей и может быть использовано при проектировании малых подводных робототехнических средств.
Известна модель судна с движителем плавникового типа, построенная под руководством Г. Хертеля (см. Гидробионика в судостроении под ред. И.М. Петрова / И.М. Петров. - М.: Издательство ЦНИИТЭИС, 1970. стр. 100-101). Плавниковый движитель состоит из плавника, совершающего поступательно-вращательные колебания, привода поперечных перемещений плавника, привода вращательных перемещений плавника. Плавник представляет собой прямоугольный металлический лист постоянной толщины.
Недостатком конструкции является то, что такая форма плавника не является оптимальной по сравнению с крыловым профилем и приводит к значительным срывам потока при движении плавника. Это, в свою очередь, ухудшает пропульсивные характеристики плавникового движителя и увеличивает затраты энергии на движение плавучего объекта.
Известен также корабль с плавниковым движителем (см. пат.RU №2360831 «Корабль с плавниковым движителем», опубл. 10.07.2009, кл. МПК: В63Н 1/36). Движитель состоит из последовательности гибких полосовых поверхностей с жесткими ребрами, выполняющими перемещения в цепной сцепке, задающей углы наклона жестких ребер по касательной к бегущей синусоиде, что в разные моменты времени образует геометрически сложные седловые поверхности со строго заданными скоростями деформации поверхности машущего крыла.
Недостатком движителя является то, что перемещения гибких полосовых поверхностей происходят по синусоидальному закону, который может быть не оптимальным для обеспечения пропульсивных качеств движителя. Возможно ухудшение его пропульсивных качеств и, соответственно, увеличение затрат энергии на движение корабля.
Известен также подводный аппарат с плавниковым движителем, принятый в качестве прототипа (см. пат.RU №2678732 «Подводный аппарат с плавниковым движителем», опубл. 31.01.2019, кл. МПК: В63Н 1/00, 1/36), состоящий из корпуса, энергетической установки, механизмов управления и плавникового движителя, состоящего из последовательности поверхностей с жесткими ребрами, выполняющих перемещения в цепной сцепке, оснащенной шарнирами, снабженными торсионными пружинами и демпферами, обеспечивающими возникновение регулируемого гидроупругого эффекта.
Недостатком данного подводного аппарата с плавниковым движителем является то, что большие расстояния между поверхностями могут быть причиной возникновения отрывных явлений, которые оказывают негативное влияние на пропульсивные качества движителя. Тем самым, возможно увеличение затрат энергии на движение подводного аппарата.
Задачей изобретения является разработка нового плавникового движителя, состоящего из системы замкнутых поверхностей с повышенным пропульсивным коэффициентом полезного действия, что, в свою очередь, уменьшает затраты энергии на движение подводного аппарата с плавниковым движителем.
Технический результат заключается в уменьшении затрат энергии на движение подводного аппарата с плавниковым движителем за счет уменьшения вероятности возникновения отрывных явлений путем минимизации расстояний между замкнутыми поверхностями.
Поставленная задача достигается тем, что подводный аппарат с плавниковым движителем состоит из корпуса, энергетической установки, механизмов управления и плавникового движителя, состоящего из последовательности замкнутых поверхностей, с возможностью перемещения в цепной сцепке, оснащенной шарнирами, снабженными торсионными пружинами и демпферами, при этом сцепка крепится за шарниры, которые расположены внутри замкнутых поверхностей.
Сущность изобретения поясняется чертежами:
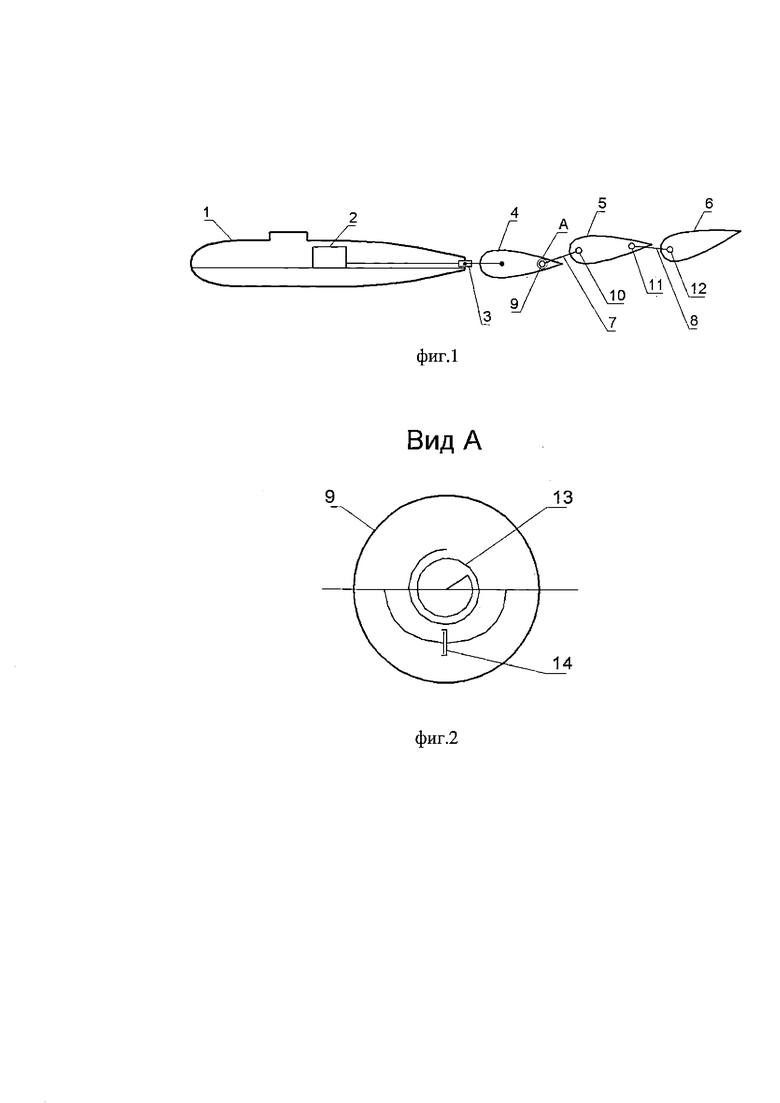
на фиг. 1 - показана схема подводного аппарата с плавниковым движителем;
на фиг. 2 - показано устройство шарнира.
Подводный аппарат с плавниковым движителем содержит корпус 1, энергетическую установку 2, механизмы управления 3 и плавниковый движитель, состоящий из замкнутых поверхностей 4-6, а также цепных сцепок 7-8, оснащенных шарнирами 9-12, расположенными внутри замкнутых поверхностей 4-6. Каждый шарнир 9-12 состоит из торсионной пружины 13 и демпфера 14.
Подводный аппарат с плавниковым движителем работает следующим образом. Внутри корпуса 1 расположена энергетическая установка 2, снабжающая энергией механизмы управления 3. Механизмы управления 3 задают замкнутой поверхности 4 поступательно-вращательные колебания, которые передаются замкнутым поверхностям 5 и 6 при помощи цепных сцепок 7 и 8. Частота колебаний замкнутой поверхности 4 совпадает с основной собственной частотой системы замкнутых поверхностей 4-6 (фиг. 1). Основная собственная частота определяется исходя из характеристик жесткости торсионных пружин 13 и демпфирования демпферов 14 (фиг. 2). Таким образом, создаются условия для возникновения регулируемого гидроупругого эффекта. Шарниры 9-12 располагаются внутри замкнутых поверхностей 4-6, что позволяет минимизировать расстояния между этими поверхностями и уменьшить вероятность возникновения отрывных явлений.
В результате разработан подводный аппарат с плавниковым движителем, состоящий из системы замкнутых поверхностей, обладающий повышенными пропульсивными качествами, вследствие этого уменьшаются затраты энергии на движение подводного аппарата с плавниковым движителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подводный аппарат с плавниковым движителем | 2018 |
|
RU2678732C1 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| Способ повышения пропульсивных качеств подводного аппарата при создании тяги | 2023 |
|
RU2827644C1 |
| Волновой движитель подводных и полуподводных судов | 2021 |
|
RU2763918C1 |
| СПОСОБ СОЗДАНИЯ СИЛЫ ТЯГИ В ПОДВИЖНЫХ СРЕДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285633C2 |
| ПРИСПОСОБЛЕНИЯ ДЛЯ ПОДВОДНОГО ПЛАВАНИЯ, СОДЕРЖАЩИЕ ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ, И ИХ БАЗОВЫЙ ЭЛЕМЕНТ - ОПОРА | 2013 |
|
RU2609187C1 |
| ПРИВОД ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2284945C1 |
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2457148C1 |
Изобретение относится к области судовых движителей и может быть использовано при проектировании малых подводных робототехнических средств. Подводный аппарат с плавниковым движителем состоит из корпуса, энергетической установки, механизмов управления и плавникового движителя, который состоит из последовательности замкнутых поверхностей, с возможностью перемещения в цепной сцепке, оснащенной шарнирами, снабженными торсионными пружинами и демпферами. Сцепка крепится за шарниры, которые расположены внутри замкнутых поверхностей. Достигается уменьшение затрат энергии на движение подводного аппарата с плавниковым движителем за счет уменьшения вероятности возникновения отрывных явлений путем минимизации расстояний между замкнутыми поверхностями. 2 ил.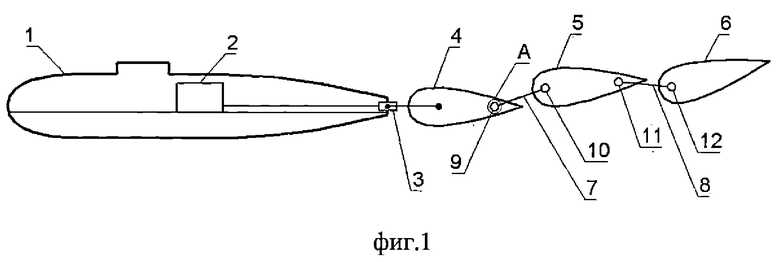
Подводный аппарат с плавниковым движителем, состоящий из корпуса, энергетической установки, механизмов управления и плавникового движителя, состоящего из последовательности замкнутых поверхностей, с возможностью перемещения в цепной сцепке, оснащенной шарнирами, снабженными торсионными пружинами и демпферами, отличающийся тем, что сцепка крепится за шарниры, которые расположены внутри замкнутых поверхностей.
| Подводный аппарат с плавниковым движителем | 2018 |
|
RU2678732C1 |
| WO 1997045317 A1, 04.12.1997 | |||
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |

