Изобретение относится к области организации безопасности дорожного движения и может быть использовано как система автоматического торможения транспортного средства при сближении с препятствием.
Известна система торможения транспортного средства, содержащая тормозное устройство и привод тормозного устройства [Электрооборудование автомобилей: учебник для вузов. / С.В.Акимов, Ю.П.Чижков. - М.: ЗАО «КЖИ «За рулем», 2004. - 384 с].
Недостатком этой системы является то, что момент начала торможения определяется водителем транспортного средства визуально по уменьшению расстояния между транспортным средством и препятствием. Субъективный фактор снижает безопасность движения.
Наиболее близкой к предполагаемому изобретению является система торможения транспортного средства, содержащая тормозное устройство транспортного средства, тормозные излучатели определенной частоты излучения, устройство привода тормозов [Электрооборудование военной автомобильной техники: учебник. / Б.А.Данов, В.Д.Рогачев, Н.П.Шевченко. - Рязань; Воен. автомоб. ин-т, 2005. - 598 с].
Работа системы основана на том, что при торможении транспортного средства происходит излучение назад колебаний определенной длины волны, которое визуально регистрируется водителем сзади идущего транспортного средства, приводящим в действие тормозную систему.
Недостатком известной системы торможения является то, что система приводится в действие водителем после визуальной регистрации сигнала торможения впереди идущего транспортного средства или другого препятствия. Длительность времени от появления излучения до начала приведения в действие тормозных устройств зависит от реакции и физического состояния водителя и составляет десятые доли секунды. Этим обусловлен большой путь торможения. Другим недостатком является появление на пути следования транспортного средства препятствия, не излучающего предупреждающий сигнал. В такой ситуации общее время торможения до полной остановки увеличивается из-за времени, необходимого для распознавания препятствия и принятия решения о необходимости торможения.
Технический результат направлен на устранение субъективного фактора (реакцию водителя) из процедуры аварийного торможения, повышение скорости срабатывания тормозной системы с помощью электронно-электромагнитно-механической системы и автономизацию (независимо от водителя) действия тормозной системы независимо от характера препятствия и наличия излучателей у препятствия.
Технический результат достигается тем, что система торможения транспортного средства как участника дорожного движения, содержащая тормозное устройство транспортного средства, тормозные излучатели определенной частоты излучения, устройство привода тормозов, дополнительно снабжена генератором монохроматических колебаний, усилителем мощности, направленным излучателем, приемником излучения, усилителем узкополосным, двумя формирователями прямоугольных импульсов, двумя интеграторами, компаратором, усилителем тока, электромагнитным приводом, при этом усилитель мощности соединен с генератором, излучателем и формирователем импульсов, соединенным с интегратором, выход которого соединен с входом компаратора, при этом усилитель узкополосный соединен с приемником и со вторым формирователем прямоугольных импульсов, который соединен со вторым интегратором, выход которого соединен со вторым входом компаратора, выход компаратора соединен с входом усилителя тока, а выход усилителя тока соединен с электромагнитным приводом, механически соединенным с устройством привода тормозов.
Отличительным признаком предлагаемого изобретения является то, что система торможения дополнительно снабжена генератором монохроматических колебаний, усилителем мощности, направленным излучателем, приемником излучения, усилителем узкополосным, двумя формирователями прямоугольных импульсов, двумя интеграторами, компаратором, усилителем тока, электромагнитным приводом, при этом усилитель мощности соединен с генератором, излучателем и формирователем импульсов, соединенным с интегратором, выход которого соединен с входом компаратора, при этом усилитель узкополосный соединен с приемником и со вторым формирователем прямоугольных импульсов, который соединен со вторым интегратором, выход которого соединен со вторым входом компаратора, выход компаратора соединен с входом усилителя тока, а выход усилителя тока соединен с электромагнитным приводом, механически соединенным с устройством привода тормозов.
На фиг.1 представлена функциональная схема реализации предлагаемой системы аварийного автоматического торможения.
На фиг.2 представлены зависимости напряжения от времени Uвх1 и Uвx2 на входах интеграторов (а, б), на выходах интеграторов Uвых1, Uвых2 (в) и на выходе компаратора (Uвых1-Uвых2) (г).
Функциональная схема (фиг.1) содержит транспортное средство 1, препятствие 2, генератор монохроматических колебаний 3, усилитель мощности 7, направленный излучатель 4, приемник излучения 5, усилитель узкополосный 6, два формирователя прямоугольных импульсов 8 и 9, два интегратора 10 и 11, компаратор 12, усилитель тока 13, электромагнитный привод 14, усилитель тормозной 15, тормозные устройства 16, при этом усилитель мощности 7 соединен с генератором 3, излучателем 4 и формирователем импульсов 9, соединенным с интегратором 11, вход которого соединен с входом компаратора 12, при этом усилитель узкополосный 6 соединен с приемником 5 и со вторым формирователем прямоугольных импульсов 8, который соединен со вторым интегратором 10, выход которого соединен со вторым входом компаратора 12, выход компаратора соединен с входом усилителем тока 13, а выход усилителя тока 13 соединен с электромагнитным приводом 14, механически соединенным с усилителем тормозного устройства 15, соединенного с тормозными устройствами 16. Препятствие 2, находящееся на пути следования транспортного средства, создает отраженный сигнал 17 из непрерывно излучаемого сигнала 18.
Принцип действия устройства построен на изменении частоты отраженного сигнала от объекта 2 относительно приемника 5.
Устройство работает следующим образом. Генератор 3 генерирует монохроматические колебания, которые усиливаются усилителем мощности 7. Излучаемые колебания 18 могут быть ультразвуковыми или электромагнитными. Усиленный сигнал поступает на излучатель 4, который излучает монохроматические колебания в непрерывном режиме в направлении движения транспортного средства 1. При наличии препятствия 2 впереди на пути движения излучаемый сигнал 18 отражается обратно и отраженный сигнал 17 регистрируется приемником 5 движущегося транспортного средства. При изменении расстояния до препятствия согласно эффекту Допплера частота отраженного сигнала изменяется: при сокращении расстояния частота увеличивается, а при увеличении расстояния до препятствия частота сигнала уменьшается. Если преобразовать разность частот приемного и излучающего трактов в постоянные электрические сигналы, то по разности этих сигналов можно судить о сокращении расстояния до препятствия, приближении препятствия и о наличии предаварийной ситуации. Величина разностного сигнала пропорциональна скорости сближения. При уменьшении расстояния до препятствия на выходе компаратора 12 появляется разностный сигнал, который после усиления усилителем 13 управляет электромагнитным приводом 14 тормозного усилителя 15, соединенного с тормозными устройствами 16.
При наличии препятствия 2 отраженный от препятствия сигнал 17 регистрируется приемником 5, усиливается узкополосным усилителем 6 и поступает на вход формирователя импульсов 8. Формирователь импульсов 8 формирует прямоугольные импульсы одинаковой длительности tимп1 (фиг.2а) и заданной амплитуды Uимп1 одной (положительной) полярности. Длительность импульсов tимп1 не больше половины периода колебаний излучаемого сигнала tимп1<T1. Импульсы формируются с помощью, например, ждущего мультивибратора. Сформированный импульсный сигнал Uвх1 подается на вход интегратора 10. Затем с помощью интегратора 10 импульсный сигнал преобразуется в сигнал с постоянным значением напряжения
Uвых1 (фиг.2б, 2в), пропорциональным частоте импульсов, и поступает на вход компаратора 12.
Сигнал с усилителя мощности 6 поступает на вход другого формирователя импульсов 9, который формирует прямоугольные импульсы такой же длительности
tимп1=tимп1 и амплитуды Uимп2=Uимп1, как в первом формирователе (фиг.26). Импульсный сигнал Uвx2, подаваемый на вход интегратора 11, преобразуется с помощью интегратора 11 в сигнал постоянного тока Uвыx2 (фиг.2б, 2в). Сигналы с выходов интеграторов 10 и 11 соответственно Uвых1 и Uвых2 поступают на соответствующие входы компаратора 12. На входе компаратора 12, на который подается сигнал Uвых2 с тракта излучателя, устанавливается электронный ключ, который при отсутствии сигнала от приемника закрыт, а при наличии сигнала от приемника открыт. Это осуществляется, например, с помощью транзистора, управляемого сигналом от приемного тракта. Поэтому при отсутствии сигнала на приемнике на выходе компаратора 12 сигнала нет и электромагнитный привод 14 не действует.
При появлении в приемнике 5 отраженного сигнала 17 от препятствия 2 он усиливается узкополосным усилителем 6. Из усиленного синусоидального сигнала формируется импульсный сигнал, который интегрируется интегратором 10, и получается постоянный сигнал, величина которого пропорциональна частоте колебаний. При наличии принимаемого сигнала вход компаратора 12 по тракту излучателя открывается и на него поступает сигнал, величина которого пропорциональна частоте излучателя Uвых2~f(1/T2).
При равенстве частот сигналов на излучателе v2 и на приемнике v1 периоды следования импульсов равны Т2=T1, и сигнал на выходе компаратора 12 отсутствует, так как алгебраическая сумма сигналов на входах равна нулю Uвых1-Uвых2=0. При наличии препятствия 2 сигналы на входах компаратора 12 равны при неизменном расстоянии от излучателя до препятствия, отражающего излучаемый сигнал. Если расстояние между препятствием 2 и движущимся транспортным 1 средством сокращается, то частота принимаемого сигнала увеличивается ν1>ν2 и период следования импульсов уменьшается Т2>Т1 При неизменной длительности импульсов и большей частоте ν1 величина сигнала на выходе интегратора 8 тракта приемника 5 увеличивается Uвых1-Uвых2>0. При этом на выходе компаратора 12 появляется разностный сигнал положительной полярности (фиг.2г). Этот сигнал усиливается усилителем тока 13, который управляет действием электромагнитного привода 14, приводящего в действие тормозной усилитель 15 и, соответственно, тормозные устройства 16. При увеличении расстояния между транспортным средством 1 и препятствием 2 частота принимаемого сигнала v1 уменьшается и сравнивающее устройство компаратора 12 вырабатывает сигнал отрицательной полярности. Рабочая точка выходного усилительного каскада компаратора 12 выбирается так, чтобы он был открыт только при сигнале положительной полярности.
Сопоставительный анализ с прототипом показал, что предлагаемое изобретение исключает из процедуры аварийного торможения субъективный фактор (реакцию водителя), повышает скорость срабатывания тормозной системы с помощью электронно-электромагнитно-механической системы и автономизирует действие тормозной системы независимо от характера препятствия и наличия сигнальных излучателей препятствия. Предлагаемая система торможения транспортного средства эффективней в сравнении с аналогом, так как для торможения используется автоматическая система. При ее работе увеличивается безопасность движения транспортного средства и, следовательно, безопасность всех участников дорожного движения в различных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Устройство для контроля характеристик движения транспортного средства | 1988 |
|
SU1585816A1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808856C1 |
| Противоблокировочная тормозная система автомобиля | 1990 |
|
SU1781107A1 |
| Устройство для контроля бодрствования водителя транспортного средства | 1989 |
|
SU1681844A1 |
| РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ПРИВОДА ШВЕЙНОЙ МАШИНЫ | 1992 |
|
RU2026906C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Устройство для измерения амплитуд при акустическом каротаже | 1980 |
|
SU890317A1 |
| Устройство измерения скорости для системы управления тормозами колесного транспортного средства | 1970 |
|
SU568349A3 |
| УСТРОЙСТВО ДЛЯ РАЗЛИЧЕНИЯ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАСТЕНИЙ, И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАСТЕНИЯ | 1993 |
|
RU2127874C1 |
Изобретение относится к области организации безопасности дорожного движения и может быть использовано как автоматическая система торможения транспортного средства. Устройство содержит генератор монохроматических колебаний, усилитель мощности, направленный излучатель, приемник излучения, усилитель узкополосный, два формирователя прямоугольных импульсов, два интегратора, компаратор, усилитель тока, электромагнитные приводы. Усилитель мощности соединен с генератором, излучателем и формирователем импульсов, соединенным с интегратором, выход которого соединен с входом компаратора. Усилитель узкополосный соединен с приемником и со вторым формирователем прямоугольных импульсов, который соединен со вторым интегратором, выход которого соединен со вторым входом компаратора, выход компаратора соединен с входом усилителя тока, а выход усилителя тока соединен с электромагнитным приводом, механически соединенным с устройством привода тормозов. Технический результат заключается в повышении скорости срабатывания тормозной системы транспортного средства. 2 ил.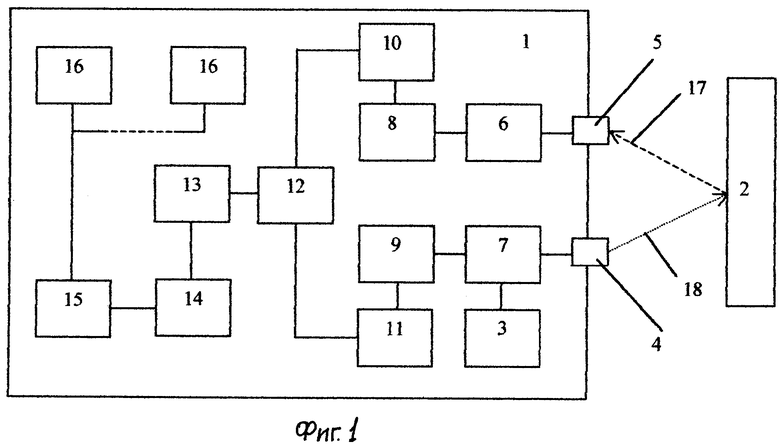
Система торможения транспортного средства как участника дорожного движения, содержащая тормозное устройство транспортного средства, тормозные излучатели определенной частоты излучения, устройство привода тормозов, отличающаяся тем, что дополнительно содержит генератор монохроматических колебаний, усилитель мощности, направленный излучатель, приемник излучения, усилитель узкополосный, два формирователя прямоугольных импульсов, два интегратора, компаратор, усилитель тока, электромагнитные приводы, при этом усилитель мощности соединен с генератором, излучателем и формирователем импульсов, соединенным с интегратором, выход которого соединен с входом компаратора, при этом усилитель узкополосный соединен с приемником и со вторым формирователем прямоугольных импульсов, который соединен со вторым интегратором, выход которого соединен со вторым входом компаратора, выход компаратора соединен с входом усилителя тока, а выход усилителя тока соединен с электромагнитным приводом, механически соединенным с устройством привода тормозов.
| Устройство для обеспечения безопасной дистанции | 1983 |
|
SU1126996A1 |
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2050561C1 |
| DE 10258167 A1, 31.07.2003. | |||

