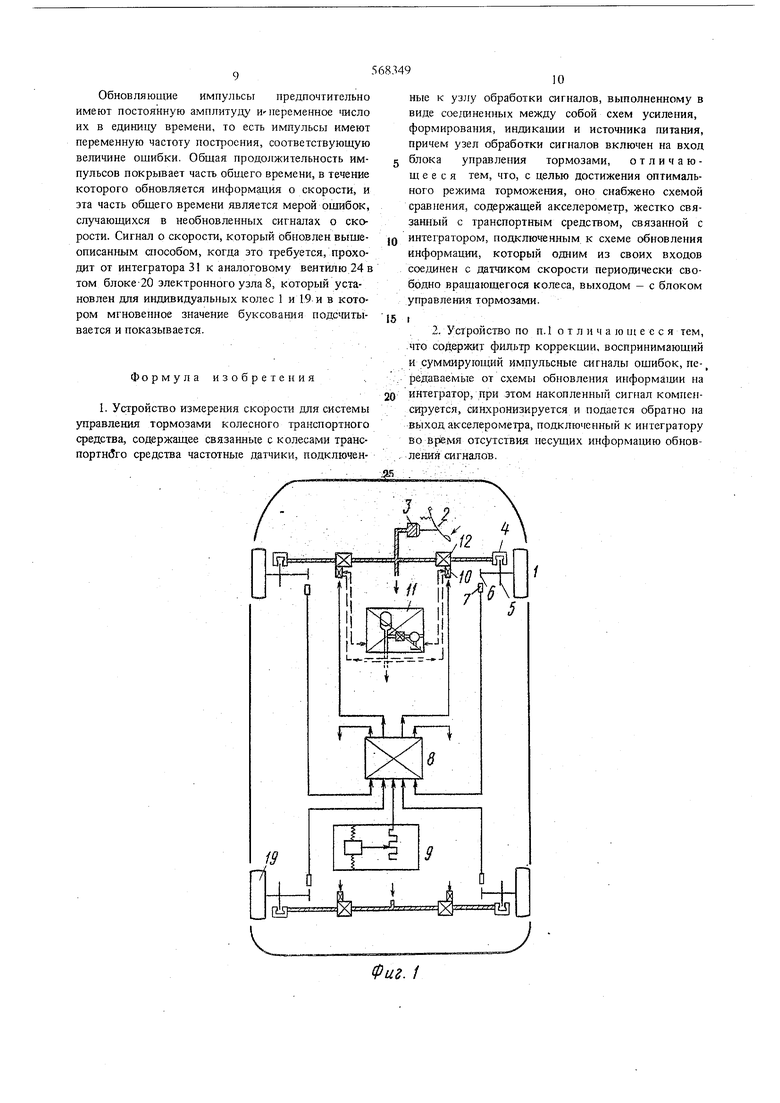
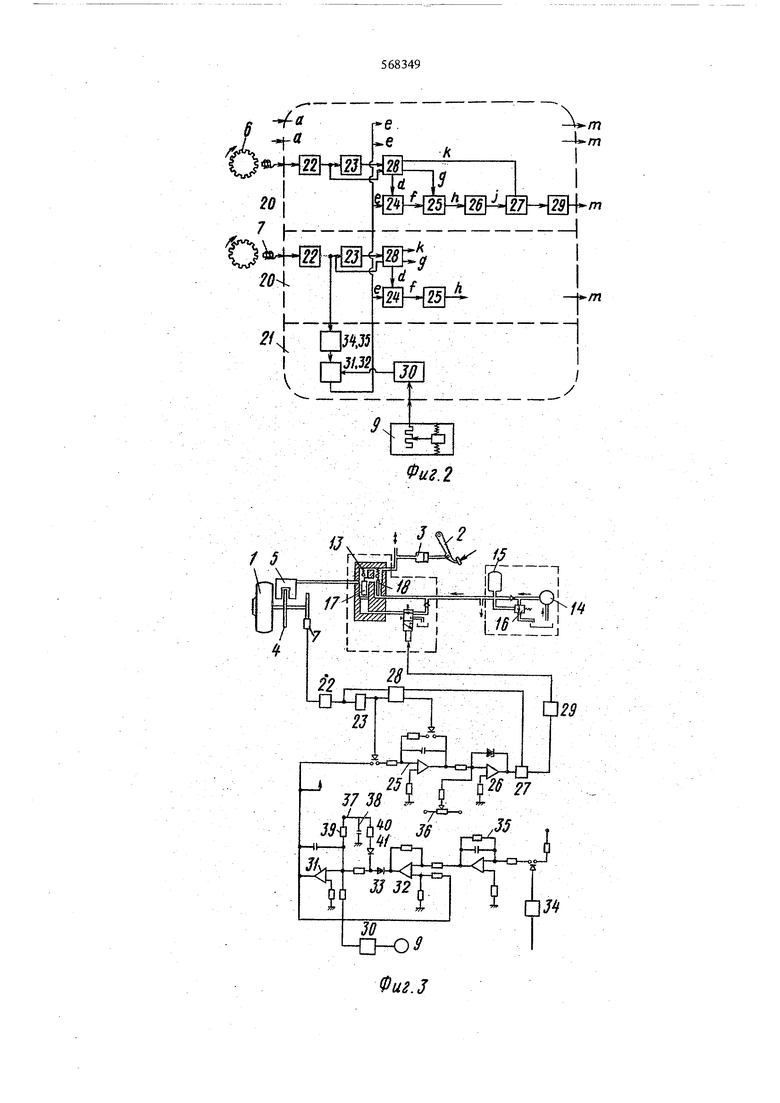
(54) УСТРОЙСТВО ИЗМЕРЕНИЯ СКОРОСТИ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТОРМОЗАМИ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА .знии движения, то есть при торможении, в тот же узел поступают проинтегрированные сигналы акселерометра 9, который жестко укреплен на повозке (автомобиле). Вькодной сигнал с узла 8 представляет собою электрическую величину, пропорциональную мгновенному отставанию (запаздьшанию) или пробуксовке колесом 1. Этот сигнал m (фиг. 4) становится логаческой е/вдницей или нулем относительно заданного предела пробуксовки. Когда выходной сигнал с узла 8 представляет логическую единицу, указьтающую, что мгновенная пробуксовка колеса превышает заданный предел, вентиль 10 откры вается и тормозная жидкость из агрегата 11 устремля ется к элементу управления 12, который снабжен пру жиной возврата 13. В этот момент связь между цилиндром 3 и тормозным цилиндром колеса прбрьшается Тормозное усн;ше на колесо уменьшается, а его скорость вращения возрастает. С приближением колеса к заданному пределу пробуксовки полярность сигнала m меняется, связь между агрегатом 11 и элементом 12 с помощью пружины 13 раз рьшается, сила торможения возрастает, а скорость вр щения колеса уменьшается. Таким образом, колесо подвергается периодическому торможеьшю, сила кот рого колеблется вокруг предельного значения пробу совки, задаваемой для данного колеса. Гидравлический агрегат 11 включает насос 14, управляемый коленчатым валом двигателя автомобнля, аккумулятор давления 15 и регулятор 16, которые снимают нагрузку с насоса 14, когда аккумулятор 15 заряжен. Элемент управления 12, регулирующий давление тормозной жидкости в тормозном цилиндре колеса, состоит из запорного клапана в сочетании с цилиндром 17 для сглажива1шя колебаний объема и предохранительного клапана 18. Элемент 12 регулирует давление торможения или эффективной тормозной мощности двигателя от нуля до максимуме слостоянным объемом жидкости, заключенной между элементом управления 12 и тормозным дилиндром колеса. Если работа тормозной системы приостанавливается (прерьшается), зто не мешает работе обычной тормозной системы. Элемент управления может быть выполне; в раз;шчных формах. Замедление автомобиля воспринимается акселерометром 9 во время торможения, и его сигнал подается на узел 8, где он интегрируется. В результате получают сигнал, нропорниональный скорости повозки. Скорость повозки, найденная с помощью акселерометра, отличается от истинного ее значения, что видно из графика на фиг. 6. Ошибку в определении скорости можно уменьшить за счет обновления сигнала, который характеризует ско.рость во время торможения. Для этого одно из колес автомобиля, предпочтительно заднее 19, приниг.шется за контрольное, которое периодически освобождается от торможения и становится свободновращающимся в течение некоторого промежутка времени. Индуктивный прообра; латель 7 датчика, связанный с контрольным колесом 19, будет вьщавать сигналы, которь е совместно с проинтегрированными сигналами акселерометра поступают на схему сравнения. Пока контрольное колесо подвергается торможению, выходные сигна.лы связанного ; ним датчика можно считать пропорциональными истинной скорости повозки. Критерий для условия, когда скорость контрольного колеса может уве;шчиться до скорости автомобиля, может быть выбран исходя из различных факторов. Выбор критерия состоит в следующем. Эффективная тормозная мощность контрольного колеса может снижаться до значения, которое ниже заданного предела проб1ксовки по сравнению с колесом 1. Благодаря пониженному пределу пробуксовки, тормозное действие колеса 19 оказывается ниже, чем, у другах колес 1. Этот более низкий предел буксования уменьшает эффективную тормозную мощность колеса 19, но такое уменьшение нельзя считать существенным недостатком, поскольку это контрольное колесо является задним колесом, которое обьмно способствует торможению в меньшей степени (г.е. оно вносит меньшую долю в общую тормозную способность автомобиля) , чем переднее колесо. Электронный узел состоит из целого ряда блоков 20 электрических схем, предназначенных для индивидуального управления каждым колесом в отдельности 1 и 19, а также имеет общий блок 21 злектрических схем для измерения скорости повозки. На фиг. 2 лредставлена логическая схема, разделенная на три части. В верхней части показаны электрические схемы блока 20, которые составляют средство вычисле1шя для управления каждым отдельным колесом. В средней части показаны схемы, связанные с контрольным колесом 19, и таким образом блок 20 соединен с общим блоком 21, размещенным в нижней части. Каждая отдельная схема блоков 20 и 2 вьшолнена на известных элементах, которые обладают известными в электронике функциями. J Импульсы а (фиг. 4), поступающие от индуктивного (магнитного) преобразователя 7 на колесах 1 и 19 повозки, подаются на связанные с ним блоки 20 электронного узла 8, где они преобрауются схемой формирования 22 в прямоугольные мпульсы в. Последовательность импульсов в управляет риггерным делителем частоты 23. В результате родолжительность импульсов с в полз енной полелователыюсти увеличивается. Импульсы с упавляют аналоговым вентилем 24, который при пределенном условии подключает сигнал напряжеия е к HiiTerpaiopy 25. Сигнал е соответствует айденной скорости повозки. Сигнал напряжения с ключается во время интервала , де Т- продолжительность интервала; V - скорость соотвстстеующего колеса 1 и 9;
К2 - константа, или постоянный коэффициент.
Напряжение, соответствующее скорости повозки, равно , где V - скорость, а К, постоянный коэффициент. Таким образом, выходной сигнал интегратора 25 Uj KiKiK2 V/V, где Kj - постоянный коэффициент (постоянная величина).
Итак, выходной сигнал интегратора 25 пропорционален отношению скорости повозки к скорости соответствующего колеса 1 и 19. Это отнощение является приближенным значением пробуксовки. Обычно это отнощение является постоянным независимо от скорости повозки, но,, когда колесо начинает отставать в результате торможения, отношение скорости повозки к скорости замедляющегося копкса. увеличивается в соответствии с вышезаписанным уравне1шем.
Операционный усилитель, подключенный как компаратор 26, сравнивает выходное напряжение интегратора 25 с заранее настраиваемым уровнем в компараторе. Этот уровень можно регулировать, например, потенциометром 36 и он определяется той долей буксировки, которая донустима до того момента, когда торможение до.чжно стать управляемым. Выходной сигнал с выхода компаратора 26 является логической единицей , когда выходной сигнал интегратора 25 леяои ниже вышеуказанного уровня компаратора, и является логическим нулем, когда вь ходной сигнал интегратора превышает тот уровень. Выход компаратора 26 подключен к так называемому входу (сигнальному входу) триггера памяти 27, который передает входной сигнал D на выход этого триггера только тогда, когда временной импульс (или синхроимпульс) подается на другой вход триггера 27 с логической схемы 28. Сигнал, переданный таким образом на выход триггера, сохраняется на этом выходе и составляет сигнал управления, передаваемый узлом-8 после прохождешш схемы привода 29, являющейся усилителем.
Выходной сигнал j на интеграторе 25 меняется во время вычислительной операции, а также меняется выходной сигнатг m компаратора 26. Таким образом, сигналь управления не должны передаваться до того, как будет закончено вычисление. Это действие управляется синхроимпульсами к, подаваемыми от схемы 28 на триггер памяти 27. Синхроимпульсы к обуслав.пивают начало передачи сигналов от входа D к выходу триггера 27 при условии,что входной сигна; имеет значение, отличное от хранящегося (в памяти) выходного сигнала. Каждый второй импульс а, поступающий от колес 1 и 19, создает временной импульс (синхроимпульс) к в логической схеме 28, составленной из комбинации вентилей, причем эти време П ые импульсы создаются за счет объединения и интегрирования входных импульсон в и f от схемы формирования импульсов 28 и делитс:ш частоты 23. Таким же образом логическая схема 28 гепорирует (вырабатывает) также импульсы g для возврата в исходное положение интегратора 25 после сгитывания (записи) в память триггера 27.
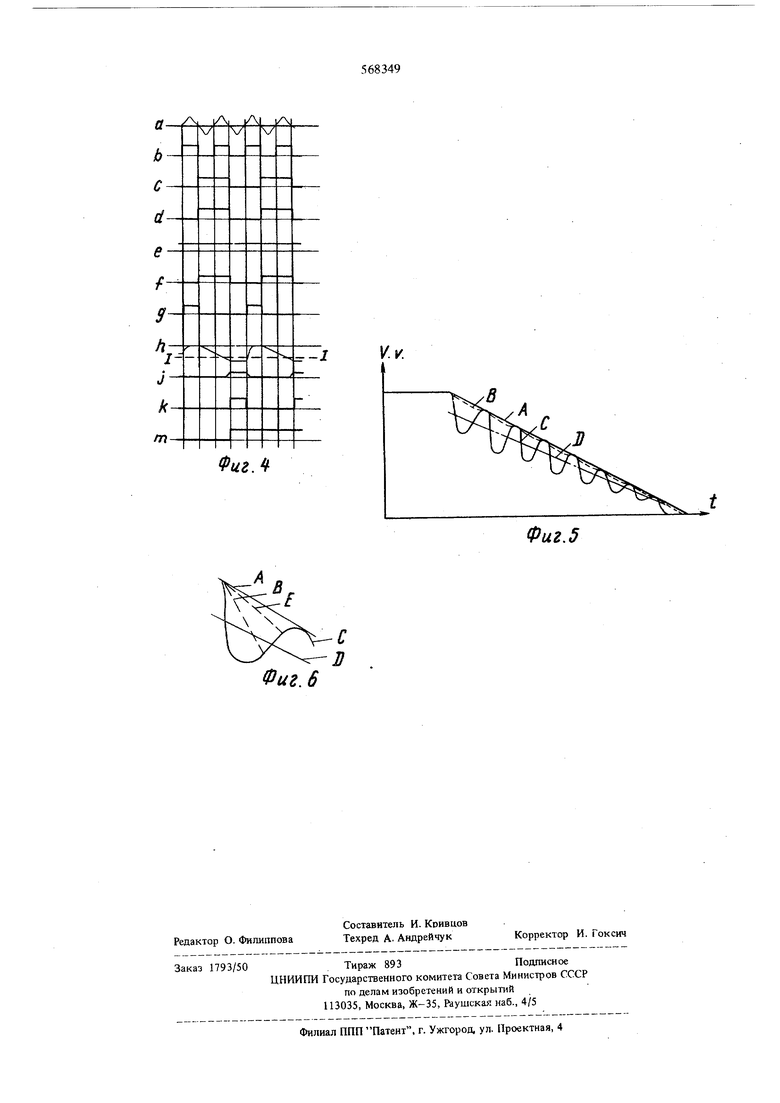
Сигналы (импульсы), показанные на фиг. 4 системы управления, являются функцией времени.
Выходные импульсы вис схемы 28 объединяются для генерирования импульсов д к к, следующих через определенные интервальЕ. Сигнал с,
представляющий предсказанную скорость повозки, может считаться постоянным но величине, и он подается на интегратор 25 во время интервалов между краями илтульсов в соответствии с графиком d для получения сигнала f. Во время следовашш вышеупомянутых интервалов происходит ин тегрирование, что показано на графике h площадью прямоугольного треугольника, который расположен между моментами двух фронтов каждого импульса f, причем тангенс угла наклона гипотенузы
пропорционален скороста повозки. Поскольку го 5изонтальная сторона треугольника представляет время и пропорциональна данного колеса, амнлитуда, то есть вертикальная наименьпгая сторона треугольника, будет пропорциональна отношеПИЮ скорости повоз1си к скорости колеса. 111триховая линия 1-1 (см. график h), соответствует значешпо уровня пробуксовки, предварительно установленному в компараторе 26 для сравнения, а разность между значениями пробуксовки и уровнем 1-1 дает на выходе комнаратора соответствующий сигнал j на триггер памяга 27. По апало1-ии синхроимпульсы к также подаются на триггер 27. так что этот триггер пропускает си1нал j в течение прохождения упомянутых синхроимнульсов на
свой выход, где сигнал j хранится до тех пор, пока вход триггера не примет другую информацию.
Узел 8 принимает информацию об определенной скорости повозки, получензюй нтсгри}1ованисм выходного сигнала от акселерометра, а также нсриодическим сравнением этою выхощ{О1о ситала с сигналом, представляющим истинную скорость новозкн в общем блоке 21.
Выходной сигнал от aKccJicjioMeipa 9 фильтруется и усиливается операшюниым усилителем 30, еети этот выходной сигпа.п п 1сдставляег замедление. В противном случае выход акселерометра отключается. Сигнал о замс;и1С}пн1 составляет сигнал, поступающий на вход интеграгора 31, который интегрирует значение этого сш нала, так что
сигнал на выходе интегратора соотвсгсгвует скорости повозки. Интегратор 31 образус часть следяндей системы, которая включает также схему обновления данных 32, снабженную CIIJIMгелем, и потенциал-чувствительный диод 33 мсжн.у выходом схемы 32 и входом шггеграюра 31, причем, этот диод предотвращает разряд. Пстил об)атной связи обеспечивается от интсграчора 31 к схеме обновления данных 32 и следяпюс ус ройс11Ю работает таким образом, что Bbixoniioii си i нал интсг|)атора 31 сравнивается с сигна;гом, пре.цстан.чяюнщм истинную скорость повозки в те промежутки времени, в которые можно узнать скорость, близкую к истинной. Для измерения этой скорости повозки используется колесо 19 в моменты его свободного враиде,ния. Импульсы а, полученные от него, подвергаются преобразованию по форме в импульсном формирователе блока 20 и после этого подаются на генератор .постоянных импульсов 34, входящий в состав общего блока 21 колес и 19. Этот блок составляет часть узла 8. Генератор 34, содержащий однопереходный транзистор с RC - цепочкой, выдает импульсы тока или напряжения с постоянной площадью. При этом ширина (продолжительность) указанных импульсов остается постоянной, но частота HOBTOpeifflH их все же остается пропорвдональной скорости колеса. Эти импульсы сумм1руются фильтром усилителя 35, обладающим свойством простой экспоненциальной задерл ки, так что выходной сигнал этой схемы соответствует наибольшей скорости колеса 19 при свободном вращении его. Эта наибольилая скоростъ приттмается равной (эквивалентной) истиьпюй скорости повозки. Затем схема oбнoвлe шя данных 32 сравнивает упомянутый периодически получаемый сигнал, характеризующий наибольшую скорость, с непрерьгого гм сигналом от акселерометра, подвергнутым интегрированию, который представляет приблизительную скорость повозки. Если скорость колеса 19 превьпиает скорость, измеряемую акселерометром 9, то интеграто 31 не воспринимает дополш;тельный (поправочный) сигнал от усилителя схемы 32 и от схемы обновления данных, предсказание скорости будет продолжаться на основе выхода акселеро.метра. Однако, ес;ш скорость контрольного колеса 19 выше, усилитель схемы 32 развивает выходной сигнал, управляющий интегратором 31, так что выход интегратора имеет значение напряжения такое, что предсказываемая скорость становится рав1юй скорости этого контрольного колеса. Следовательно, эта скорость является первоначальным значетшем скорости в каждом отдельном периоде ее определения, а сигнал, представляющий скорость свободно вращающегося контрольного колеса 19, используется только для обновления сведения о скорости повозки, получаемой при измерении и интегрировашш зшчедления. Таким образом, колесо 19 может периодически (и1ш импульсивно) тормозиться и эффект торможения затем колеблется внутри области, простирающейся по обе сторонь( от заданного значения,буксования. Сигнал о скорости, найденный таким путем, корректирует ощибки в выходном сигнале акселерометра, но не корректирует ошибки, вьвванные наклоном повозки, например наклогшым положеьшем автомобиля, движущимся по негоризонгальной дороге. Поэтому система слежения должна также включать фильтр .корреквди 37, BocnpHiinмающий (отбирающий) и суммирующий сигналы импульсных ощибок, содержащихся в выходном СИ1 .нале схемы обновления данных 32, а следовательно и во входном сигнале интегратора 31. Кроме того, во время 1П:, между обновляющими импульсами накогигец-щий сигнал (|тотеиниал) филЪтра 37 подается обратно к интегратору 31, r.rsoся поправку (добавляясь) к выхо;цюму сигналу акселерометра, подаваемому интегратор. Сигнал., определяющий скорость ПОЕОЗКИ, с достаточной степенью точноста следят за скоростью повозки во время действия торможегИЛ; не считая незначительных флоктуадий. Поэто;.. нгнокенкое буксование отдельного колеса 1 может быть опредслекго с вьгсокой степенью надежности и го .;ности. На фиг. 5 и 6 спломНой пинией А обозначена истинная скорость пово-г:;..; иремя ил.можения, а нтгриховой линией j9 - bTsr;. .p;3j;ijibf -i сигнал с выхода акселерометра. .:лъ-я .липик С представляет ПуЛЬСИруЮЩуТС .:.;)о,;ГЬ КОНТРОЛЬНОГО КОлеса 19 во время процесса TOf.: х:.укыш-,, а 1.трихпунктирная линия D указывает заданный предел: буксования, установленный для данного копеса. Этот предел буксовэпкл со. . аз л.лет постоянный. Чроцент буксования, при1г....:.:.цш ; управлению тормол ением всякий раз. iai-- тслько скорость колеса г роход1.1т этот ,ъ . : ;е.и;ея Линия Е (фиг. 6) представляет сиг.;.;;;;.: :. ::.. ,х;.:лл1ащий скорость в интервале дву;л; с .:ду 0 Лим-1 др/,. за другом операциями сбновлеккь .цанль1Х, когда вводятся юправки с помощью фильтра коррек. Щ1И 37. Сигнал зпачегшя наибольшей скорости кС.пе са 19 во время периодов его свободного вращения будет обновлять интегрнрованргый сигнал с выхода акселерометра, добавл.яясь к нему. Упомянутые сигналь сравниваются .друг с другом в схеме 32. Выходной сигнал со с.сг.аьг 32 представляет суммарную разность (ошибку) между рассматриваемыми Сигналами. Фильтр корр.екдии 37 приспособлен накопления упомянутых сигналов ошибки и для полу шния итоговой ошибки. Для этого он имеет разрядное сопротивление (или резистор) 39. Постоянная времени фильтра определяется этим резистороми конденсатором 38. Резистор 40 установлен в цепи питания и регулирует выходной сигнал с фильтра, подаваемый на интегратор 31. питания имеет также блокирующий диод 41, который предотвращает утечку и нежелательный разряд в цепи. В зависимости от заряда конденсатора 38 и других деталей, управляющих операцией, фильтр вырабатьгоает порции напряжения, подавая их на вход интегратора от акселерометра. Причем, такие порции сигнала подаются во врелм интервалов между эффективными сигналами, обновляющими информащио о скорости. Кривая скорости, представляющая скорость т.оБозки в данный момент, б.11изка к кривой ИСТИННО скорости повозки. Фильтр 37 может содержать более одного конденсатора и разрядного резистора по отдельности или оба вместе.
Обновляюи1ие импульсы предпочтительно имеют постоянную амплитуду Ипеременное шсло их в единицу времени, то есть импульсы имеют переменную частоту построения, соответствующую величине ошибки. Общая продолжительность импульсов покрывает часть общего времени, в течение которого обновляется информация о скорости, и эта часть общего времени является мерой ощибок, случающихся в необновленных сигналах о скорости. Сигнал о скорости, который обновлен вышеописан1а.1м шособом, когда это требуется, проходит от интегратора 31 к аналоговому вентилю 24 в том блоке-20 электронного уэла 8, который установлен для индивидуальных колес 1 и 19 и в котором мгновенное значение буксования подсчитывается и показывается.
Формула изобретения
1. Устройство измерения скорости для системы управления тормозами колесного транспортного средства, содержащее связанные с колесами транспортнбго средства частотные датчики, подключенные к узлу обработки сигналов, выполненному в виде соединенных между собой схем усиле шя, формирования, индикации и источника питания, причем узел обработки сигналов включен на вход блока управления тормозами, отличающееся тем, что, с целью достижения оптимального режима торможения, оно снабжено схемой сравнения, содержащей акселерометр, жестко связанный с транспортным средством, связанной с интегратором, по.цключенным к схеме обновления информации, который одним из своих входов сое;динен с датчиком скорости периодически свободно вращающегося колеса, выходом - с блоком управления тормозами.
I
2. Устройство по п. 1 о т л и ч а ю U1 е е с я тем, .что содеряедт фильтр коррекш1И, воспринимающий и суммирующий импульсные сигналы ошибок, передаваемые от схемы обновления иьгформаиии на интегратор, при этом накопленный сигршл компенсируется, синхронизируется и подается обратно на выход акселерометра, подключенный к интегратору во время отсутствия песущих информа1шю обновления сигналов.
/
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоблокировочная тормозная система автомобиля | 1990 |
|
SU1781107A1 |
| Противоблокировочное устройство для тормозной системы транспортного средства | 1973 |
|
SU622392A3 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДНОГО И/ИЛИ ТОРМОЗНОГО УСИЛИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСТАВА БЕЗ СВОБОДНЫХ ОСЕЙ В ОБЛАСТИ ГРАНИЧНОГО СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСАМИ | 1995 |
|
RU2105679C1 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |
| Автоматический тормозной привод колесной машины | 1990 |
|
SU1713843A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1990 |
|
SU1797242A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
1 I
т
,
LJ
0U2J
ФигЛ
в
J)
Фиг.5
