00
ел
11
Изобретение относится к автоматике, в частности к устройствам автоматического управления, где требуется включение различных механизмов в определенной последовательности, например дпя управления манипуляторов укладки изделий в тару.
Целью изобретения является повышение надежности устройства.
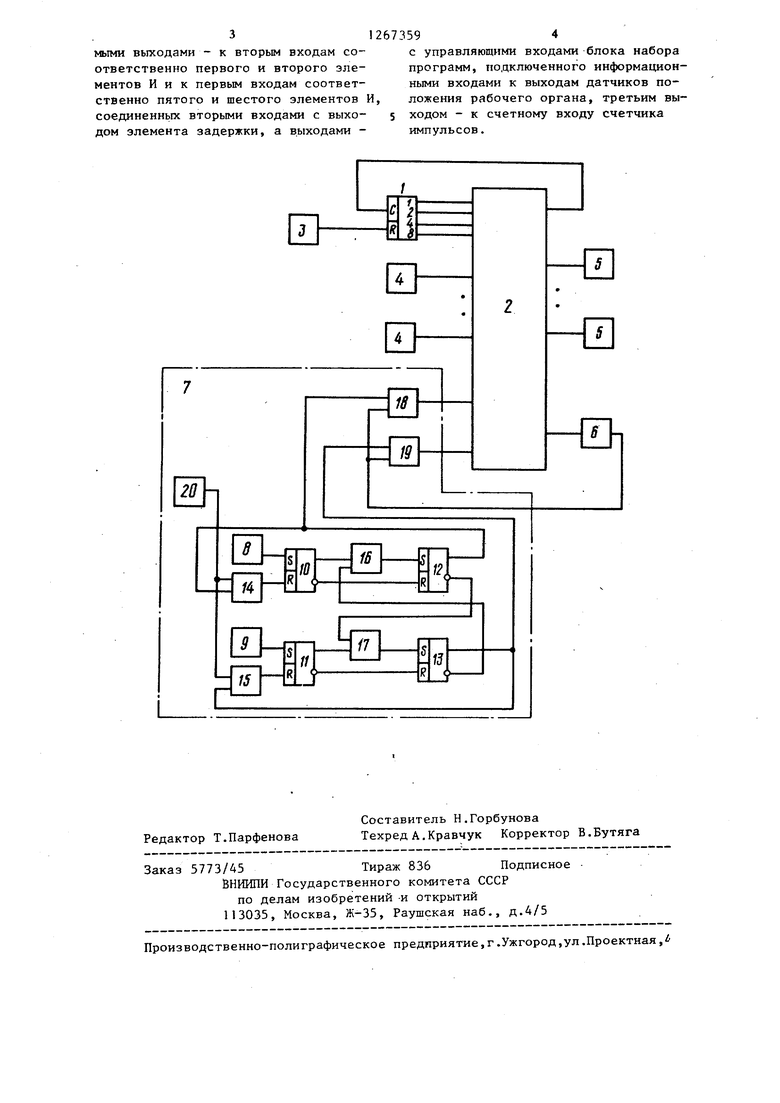
На чертеже представлена блок-схема устройства.
Устройство содержит счетчик 1 импульсов, блок 2 набора программ, датчик 3 начала цикла, датчики 4 положения , исполнительные элементы 5„ элемент 6 задержки и блок 7 управления, который содержит первый и второй датчики 8 и 9 наличия тары, первый, второй, третий и четвертый RS-триггеры 10-13, первый, второй, третий, четвертый пятый и шестой элементы И 1419, датчик 20 окончания загрузки. Блок 2 набора программ реализован на программируемой логической матрице (ПЛМ) 556РТ1, а датчики 8, 9 и 20 представляют собой бесконтактные датчики типа БД11-2.
Устройство работает следующим образом.
Датчик 3 начала цикла устанавливает в исходное состояние счетчик 1 импульсов с приходом сигнала от сработавшего датчика 4 положения объекта (манипулятора), блок 2 набора программы выдает сигналы на переклю-чение счетчика 1 импульсов в следующее состояние. В процессе укладки изделий в тару блок 7 управления формирует управляющие импульсы, поступающие в блок 2 набора программы, который обеспечивает переход манипулятора из одного режима в другой, например, из режима загрузки одной тары, в режим загрузки другой, или в режим останова.
В случае загрузки, например, одной тары, когда включен только один датчик 8 наличия тары и включены триггеры 10 и 12, сигналы на выходе блока управления соответствует данному режиму. В процессе загрузки одной тары может сработать второй датчик 9 наличия тары, при этом включится триггер, но триггер 13 не включится, а следовательно, сигнал на выходе блока 7 управления режимом не изменится, пока не закончится за673592
грузка одной тары. Когда загрузка тары закончена, датчик 20 окончания загрузки переключит триггеры 10 и 11. Триггер 11 останется включенным 5 и включит триггер 13. Сигналы на выходе блока управления режимом изменяется и манипулятор перейдет к загрузке второй тары.
Таким образом осуществляется на10 дежный переход по окончанию одного режима в другой, независимо от времени поступления сигналов от датчиков 8 и 9 наличия тары. Кроме того, сигнал О на выходе элемента задерж15 ки 7 позволяет блокировать выходные элементы И 12 блока 7 управления, тем самым обеспечивая на входах блока 2 набора программы сигналы, соответствующие останову манипулятора
20 в случае превышения времени цикла сверх допустимой величины.
Формула изобретения
25 Устройство для программного управления загрузкой, содержащее блок набора программ, подключенный адресными входами к разрядным выходам счетчика импульсов, первыми выхода30 ми - к входам исполнительных элементов, вторым выходом - к входу элемента задержки, датчики положения рабочего органа, датчик начала цикла, связанный выходом с входом обну35 ления счетчика импульсов, отличающееся тем, что, с целью повьппения надежности устройства, введено четыре RS-триггера, шесть элементов И, датчик окончания загрузки,
40 два датчика наличия тары, причем выход датчика окончания загрузки подключен к первым входам первого и второго элементов И, соединенных выходами с R-входами соответственно
45 первого и второго RS-триггеров, подключенных S-входами к выходам соответственно первого и второго датчиков наличия тары, инверсными выходами - к R-входам соответственно
50 третьего и четвертого RS-триггеров, а прямыми выходами - к первым входам соответственно третьего и четвертого элементов И, связанных выходами с S-входами соответственно 55 третьего и четвертого RS-триггеров, подключенных инверсными входами к вторым входам соответственно четвертого и третьего элементов И, а выходами - к вторым входам соответственно первого и второго элементов И и к первым входам соответственно пятого и шестого элементов соединенньк вторыми входами с выходом элемента задержки, а выходами 12673594
с управляющими входами блока набора программ, подключенного информационными входами к выходам датчиков поИ, ложения рабочего органа, третьим вы5 ходом - к счетному входу счетчика импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1381432A1 |
| Устройство для счета и измерения размеров объектов | 1987 |
|
SU1509961A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для программного управления и контроля циклическими процессами | 1985 |
|
SU1310776A1 |
| УСТРОЙСТВО ВВОДА И ХРАНЕНИЯ КЛЮЧЕВОЙ ИНФОРМАЦИИ | 2000 |
|
RU2175775C1 |
Изобретение относится к автоматике, в частности к устройствам автоматического управления, где требуется включение различных механизмов в определенной последовательности, например для управления манипулятором укладки изделий в тару. Цель изобретения - повышение надежности устройства. Введение четырех RS-триггеров, шести элементов И, двух датчиков наличия тары, датчика окончания загрузки позволяет достичь поставленную цель изобретения за счет того, что переход от одного режима к другому осуществляется независимо от времени поступления сигналов с выходов датчиков наличия тары, устройство также обеспечивает контроль врес мени каждого цикла загрузки, в слу(С чае превышения этого времени сверх (Л допустимого осуществляется останов устройства. 1 ил.
| Устройство программного управления | 1981 |
|
SU1012205A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шумоизолирующая капсула | 1982 |
|
SU1071992A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
