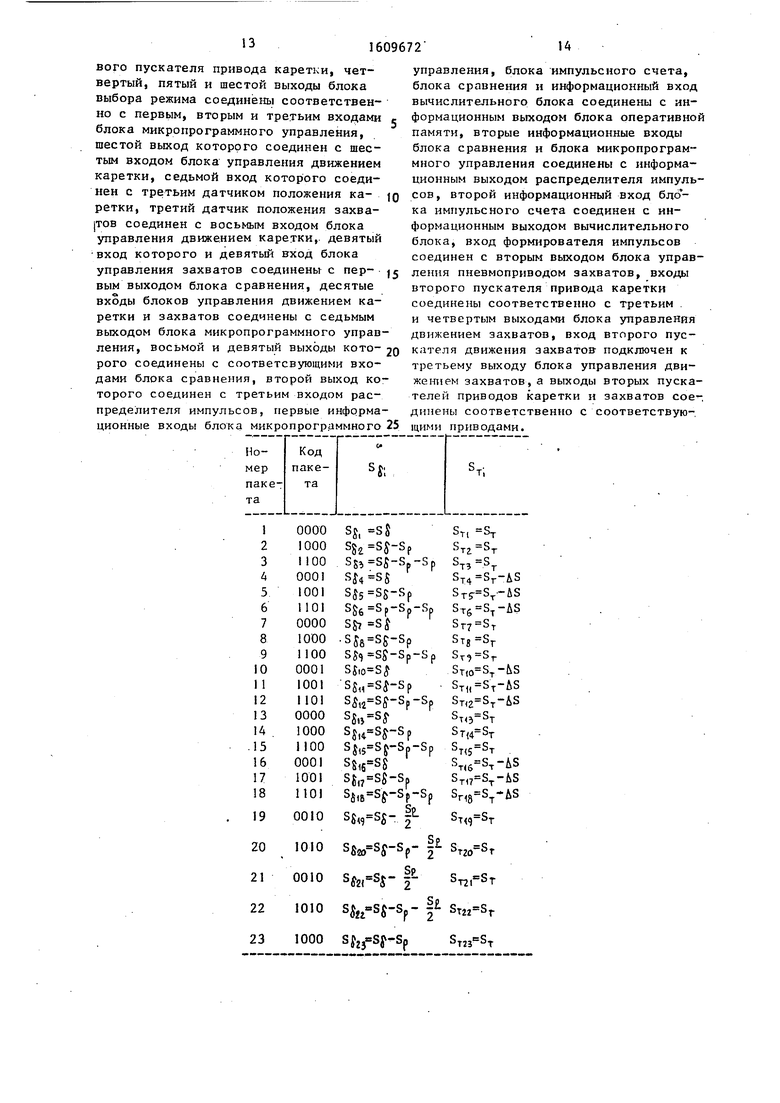
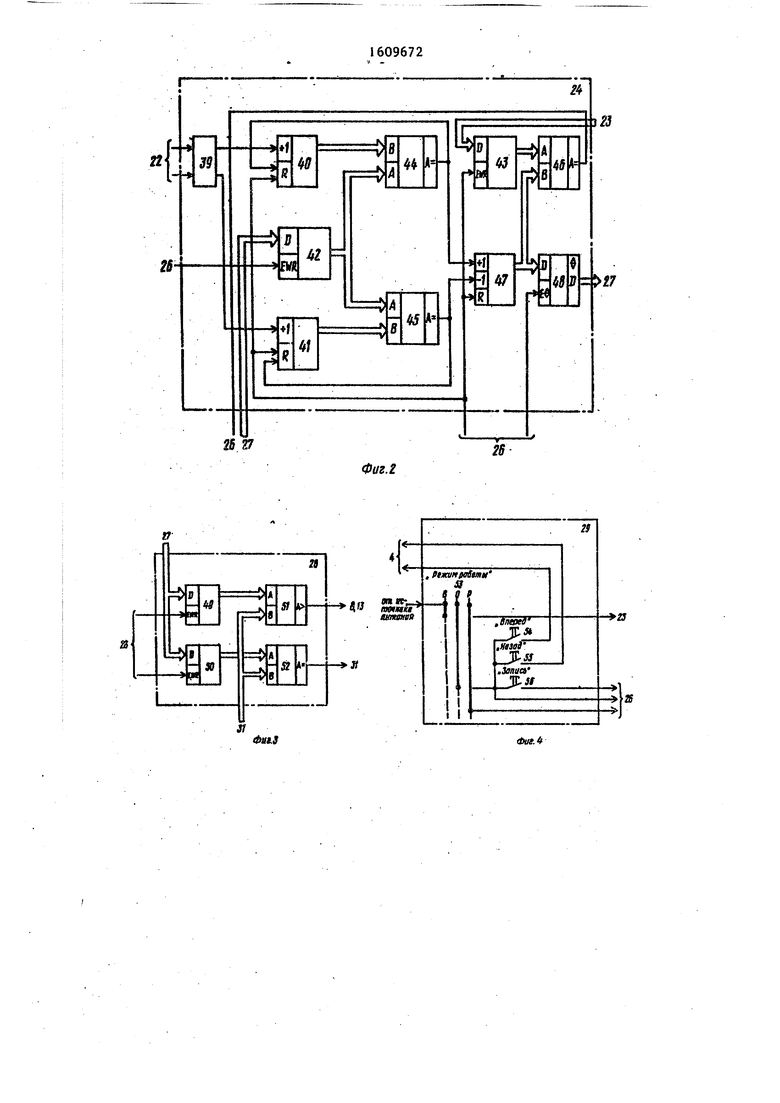
21 наличия кирпича на накопителе, им блока 26, По этой команде блок 26 фор- пульсный датчик 22 угла поворота, вычислительный блок 23, блок 24 импульсного счета, блок 25 ввода, блок 26 микропрограммного управления, блок 27 оперативной памяти, блок 28 сравнения, блок 29 выбора режима, формирователь 30 импульсов, распределитель 31 импульсов, пакет кирпича 32 на накопителе 33, вагонетка 34,
Вычислительный блок 23 содержит буферный регистр 35, вычитатель 36, ум- ножитель 37, делитель 38,
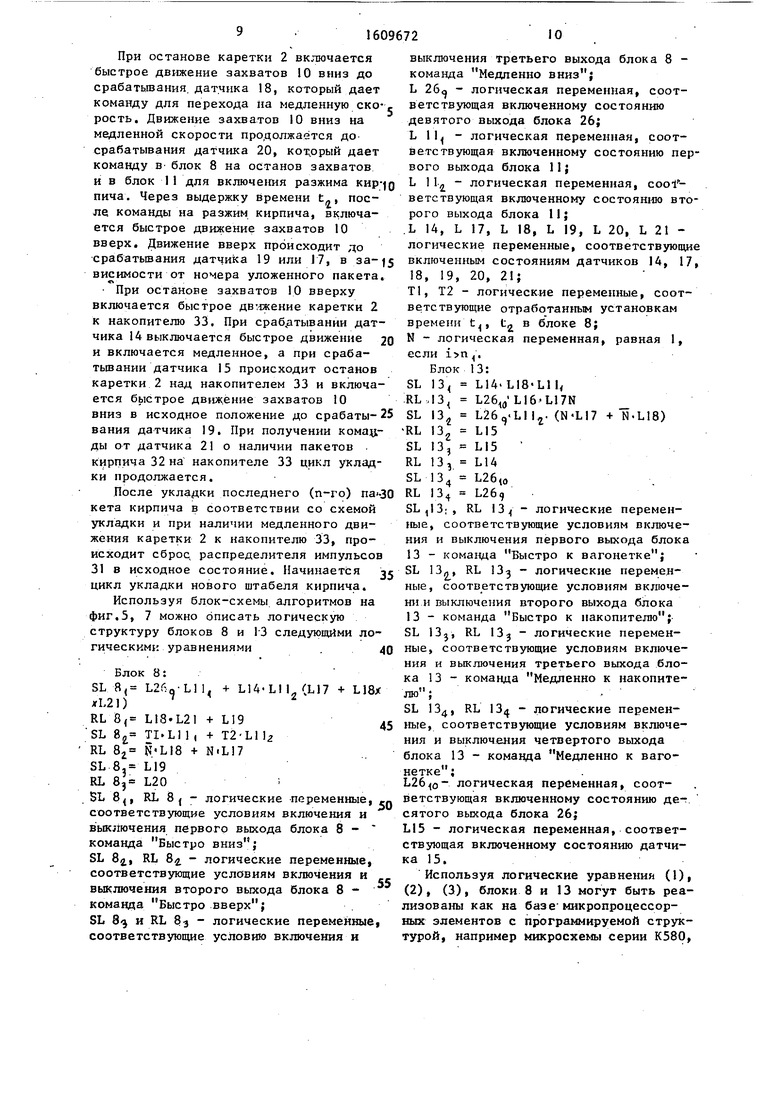
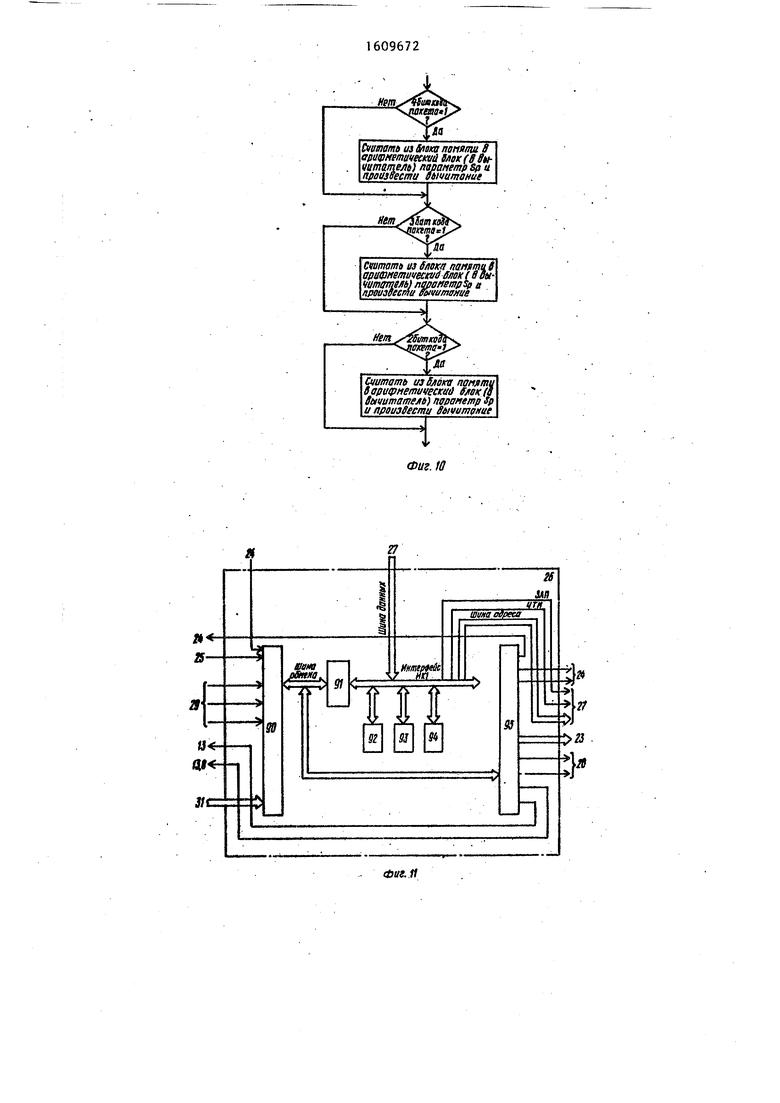
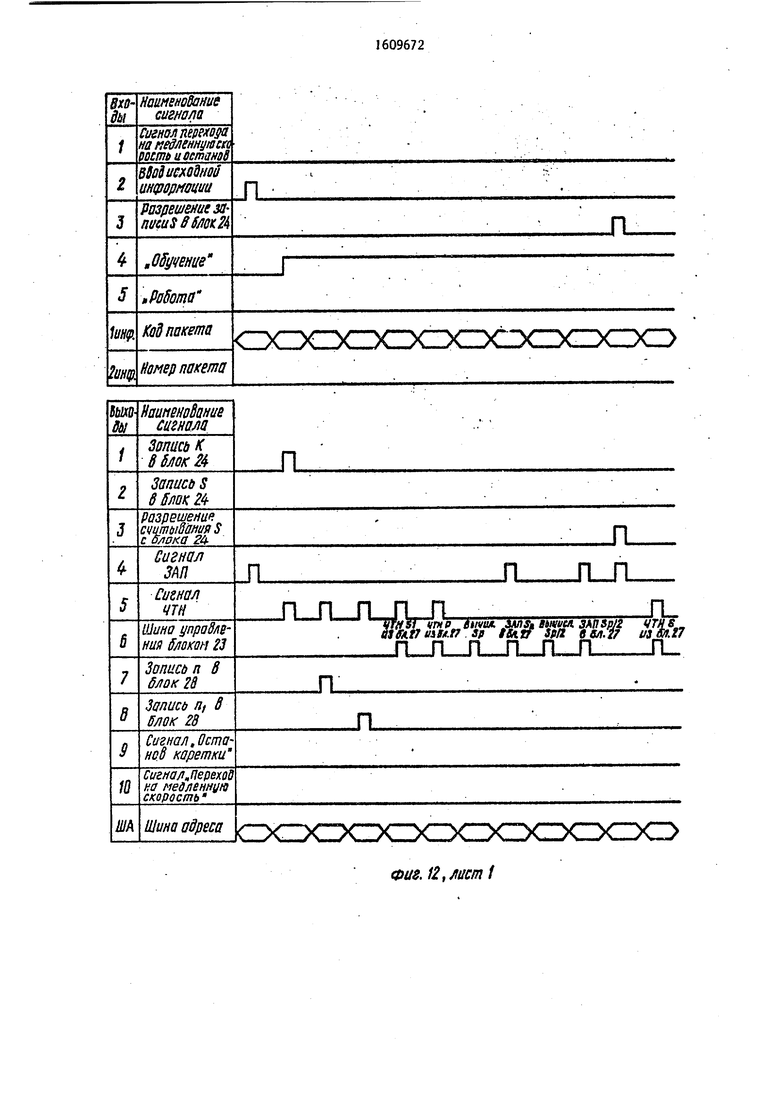
Блок импульсного счета 24 предназначен для подсчета импульсов от иммирует на адресном выходе код адреса, а на одном из выходов - сигнал записи. По сигналу записи в блоке 27 осуществляется запись данных с информационного входа по адресу на адресном : ходе, В качестве исходных технологических данных вводятся коды всех пакетов кирпича, представляющие собой формализованную информацио местонахождения пакета в щтабеле кирпича, а также S, S, Д8, Р, п,.п, k, где S - путь торможения каретки при подходе к точке позицирования (движение на медленной скорости); S - размер
блока 26, По этой команде блок 26 фор
мирует на адресном выходе код адреса, а на одном из выходов - сигнал записи. По сигналу записи в блоке 27 осуществляется запись данных с информационного входа по адресу на адресном : ходе, В качестве исходных технологических данных вводятся коды всех пакетов кирпича, представляющие собой формализованную информацио местонахождения пакета в щтабеле кирпича, а также S, S, Д8, Р, п,.п, k, где S - путь торможения каретки при подходе к точке позицирования (движение на медленной скорости); S - размер
стороны кирпича; ДЗ - расстояние сдвига слоев относительно друг друга с целью повьшения устойчивости штабеля; Р - количество кирпичей в пакете; п - количество пакетов кирпича в шта- беле;.Пд -количество пакетов кирпича, укладьшаемых в штабель при движе1ши захватов по низкой траектории; k торые поступают на входы фазового дискриминатора 39 блока 24. В зависимости от направления вращения привода 1 и соответственно датчи1 а 22 на одном из выходов фазового дискриминатора 39 формируется унитарная последовательность импульсов, которая поступает на входы счетчиков 40 или 41 , инфор- коэффициент деления импульсов импульс- д мационные выходы которых соответственного датчика перемещения и предназиа- но соединены с информационными входа- чен для задания координатных переме- ми злементоо сравнения 44 и 45, выхо- щений в метрических единицах. ды которых соединены с входами реверЗатем переключатель 53 блока 29 ус- сивного счетчика 47. В реверсивном таиазливается в положение О, (обуче- (5 счетчике 47 происходит запись коорди- ние) и управляющая комавда с выхода наты S положения каретки 2, представ- блека 29 поступает на вход блока 26. ленная в метрических единицах. В ка- По этой команде блок 26 формирует на честве буферного элемента в блоке 24 адресном выходе код адреса соответст- используется магистральный элемент 48, вующих данных, который инкрементирует-20 информационные входы которого соедине- ся в соответствии с записанной в бло- ны с информационными выходами ревер- ке 26 программой, алгоритм которой сивного счетчика 47. После точной ос- приведен на фиг. 9, а на другом выхо- тановки каретки 2 на позиции первого де блока 26 формируется сигнал чтения. пакета на вагонетке 34 производится
Считьшаемая информация формируется 2S запись координаты S в блок 27. Нажа- на информационном выходе блока 27 и тием кнопки управления 56 Запись по управляющим сигналам блока 26 за- блока 29 команда с выхода блока 29 письгоагтся в соответствующие блоки. поступает на вход блока 26. По этой . Первоначально из блока 27 считыва- команде блок 26 формирует на выходе ется в блок 24 коэффициент К, который 30 сигнал разрешения считывания координа- по управляющему сигналу с выхода бло- ты S, который поступает на вход разка 26 записывается в регистр 42 бло- решения магистрального элемента 48 ка 24 и поступает на входы А элемен- блока 24. В исходном состоянии инфор- тов сравнения 44, 45.мационные выходы магистрального элеВ блок 28 по управляющим сигналам . мента 48 блока 24 находятся в высоко- с выходов блока 26 записываются пара- импедансном состояиии. При поступле- метры п и п.НИИ сигнала разрешения на информационДалее из блока 27 в умножитель 37 ных выходах магистрального элемента блока 23 последовательно счнтьюаются 48 формируется значение координаты S, параметры S и Р, производится вычис- Q записанной в реверсивиом счегчике 47.
По сигналу записи блока 26 осуществляется запись координаты S в блок 27 оперативной памяти. Затем из блока 27 последовательно считываются в вычита- 45 тель 36 блока 23 S и S, производится вычисление S S - S и результат записывается в блок 27. На этом подготовительный этап заканчивается и пере- KJDoчaтeль 53 блока 29 устаиавливается
ление размера пакета , Р и результат через буферный элемент 35 блока 23 записьшается в блок 27. Параметр S t считьшается из блока 27 в делитель блока 23, производится вычисление
3
S- 2
-- и результат записывается в блок
27. Управление считьшанием и выполнением операций в блоке 23 осуществляется по шине выхо да блока 26. Нажатием 50 в положение .Р (работа). По этой ко- кнопок 54 или 55 включается пускатель мацце блок 26 формирует сигнал считывания и код адреса значения Sg, которое считьюается из блока 27 и вычита- тель 36 блока 23.
55
4 и производится точная установка каретки 2 над вагонеткой 34 на позиции первого пакета штабеля кирпича.
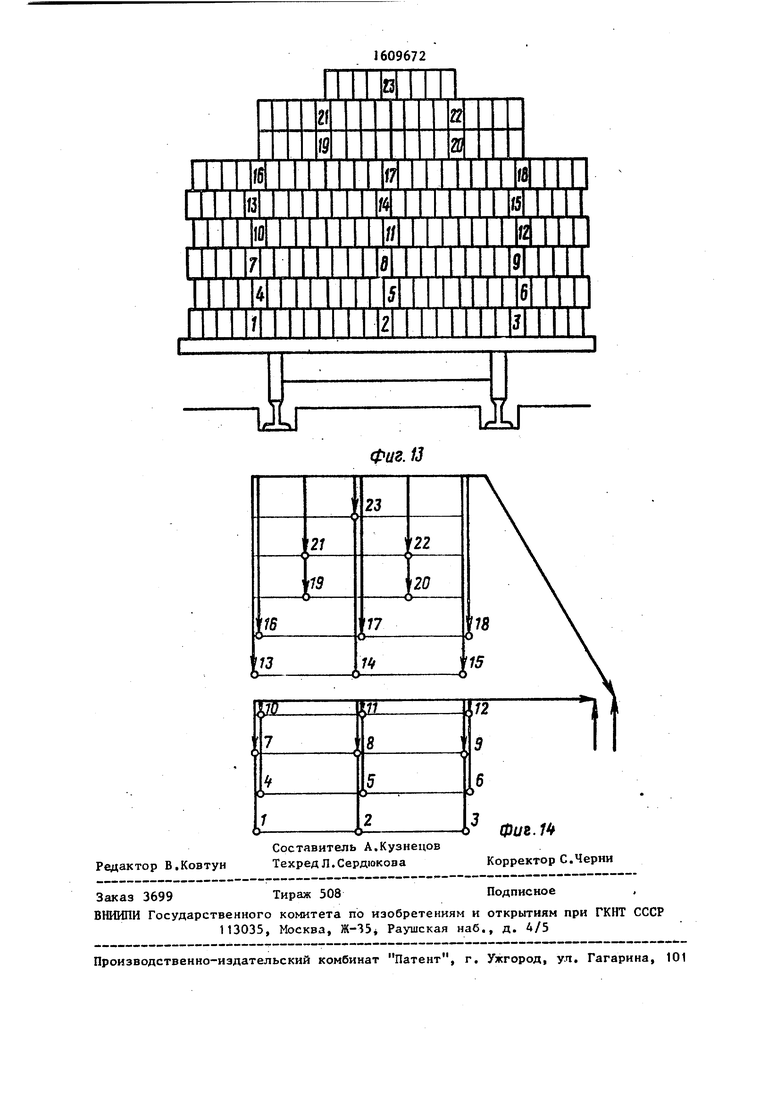
При движении каретки 2 с выхода датчика 22, которой кинематически связан с приводом 1, поступает две серии импульсов, сдвинутые на 90 по фазе друг относительно друга,.коДалее в блоке 26 производится анализ номера пакета, который поступает на вторые информационные входы блока 26 с выходов распределителя импульсов 31. На основании анализа номера пакеДалее в блоке 26 производится анализ номера пакета, который поступает на вторые информационные входы блока 26 с выходов распределителя импульсов 31. На основании анализа номера пакета в блоке. 26 производатся считыванием из блока 27 соответствующего кода пакета. Коды пакетов составляют на основании конфигурации штабеля.. В таблице приведены коды пакетов,
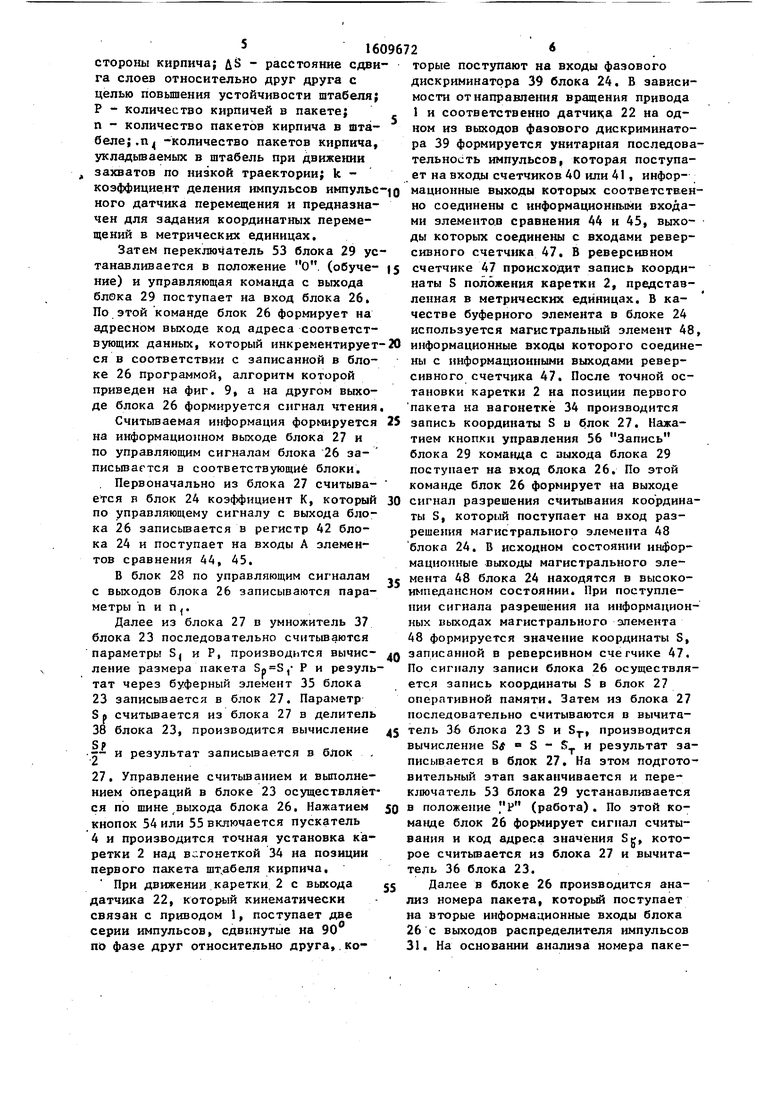
расстояния и ST; для штабеля, представлеиного на фиг. 13 где SS, - расстояние, пройденное кареткой 2 на
быстрой скорости при укладке i паке- Q та, где iel.,.n; ST; - расстояние торможения каретки 2 при укладке i пакета
При анализе старших битов кода
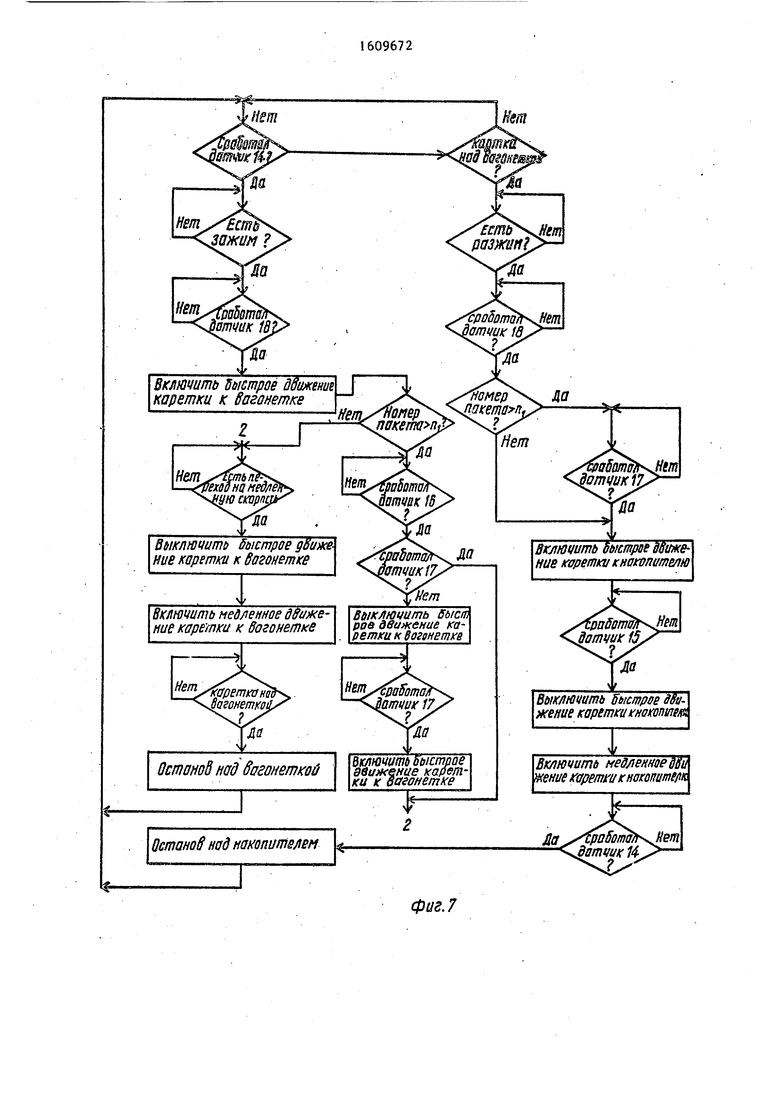
ся до срабатьшания датчика 19, а если .. То до срабатьшания датчика 17. При срабатывании датчика 19 включается быстрое движение каретки 2 к вагонетке 34. При траектории (фиг.1) движение захватов и . Датчик 16 исклю чает аварийную ситуацию и отключает быстрое движение каретки 2 к вагонет- ке, если при его срабатывании и текущем номере пакета , захваты 10 на
находятся в верхнем положении, т.е. не сработал датчик 17. При движении каретки 2 к вагонетке с выхода датчи(фиг ю) происходит расчет SJ. . Вычнс- . 22 на входы фазового дискриминато- значение SJ считывается с инленное „,
формационного выхода блока 23 и по ко- мавде с выхода блока 26 записьшается в регистр 43 блока 24. Таким образом, перед.началом каждого цикла укладки JQ пакетов в регистр 43 блока 24 заносится значение SJj.
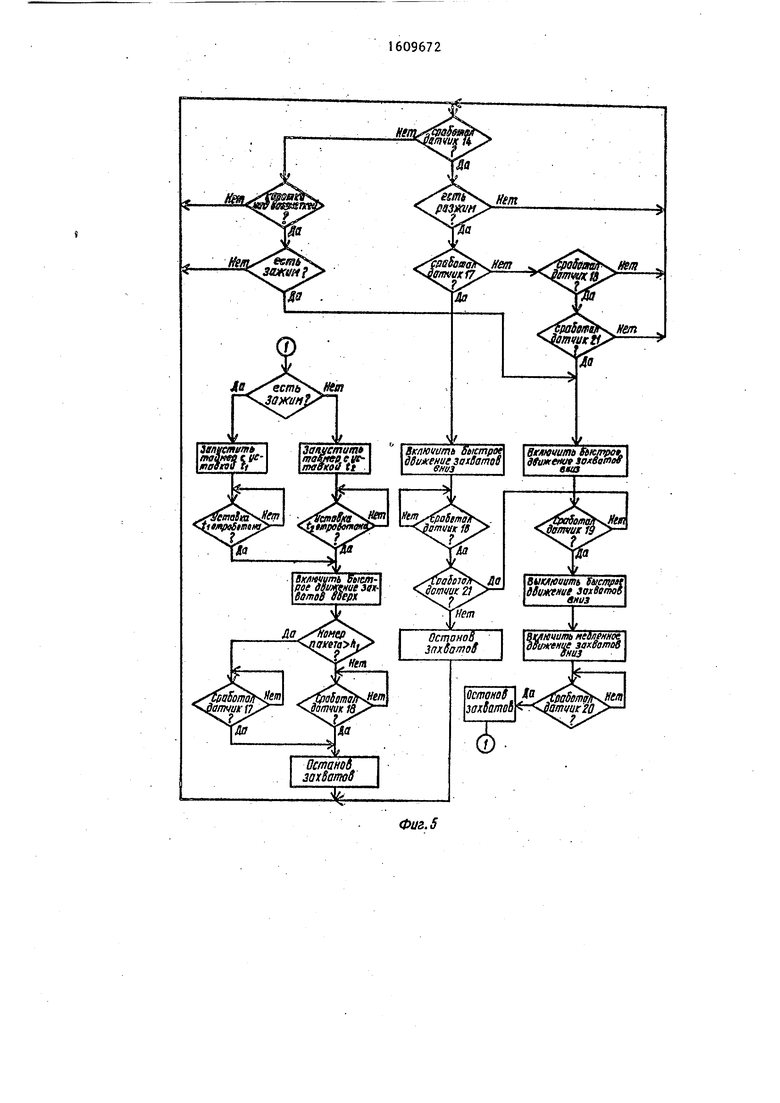
В исходном положении каретка 2 с захватами 10 находится над накопителем 33,- захваты 10 разжаты и находят- 25 ся в промежуточном, положении. Включены датчик 15 положения каретки 2 и датчик 19 положени захватов. Распределитель 31 импульсов установлен в исходное состояние.
При срабатывании датчика 21 наличия пакета кирпича 32 на накопителе
33 сигнал от которого поступает на вход блока 8, включается быстрое дви- зкение захватов Ю вниз до срабатыва- ния датчика 18. При срабатывании датчика 18 выключается быстрое движение захватов 10 и включается медпенное движение захватов 10 до срабатьгеания
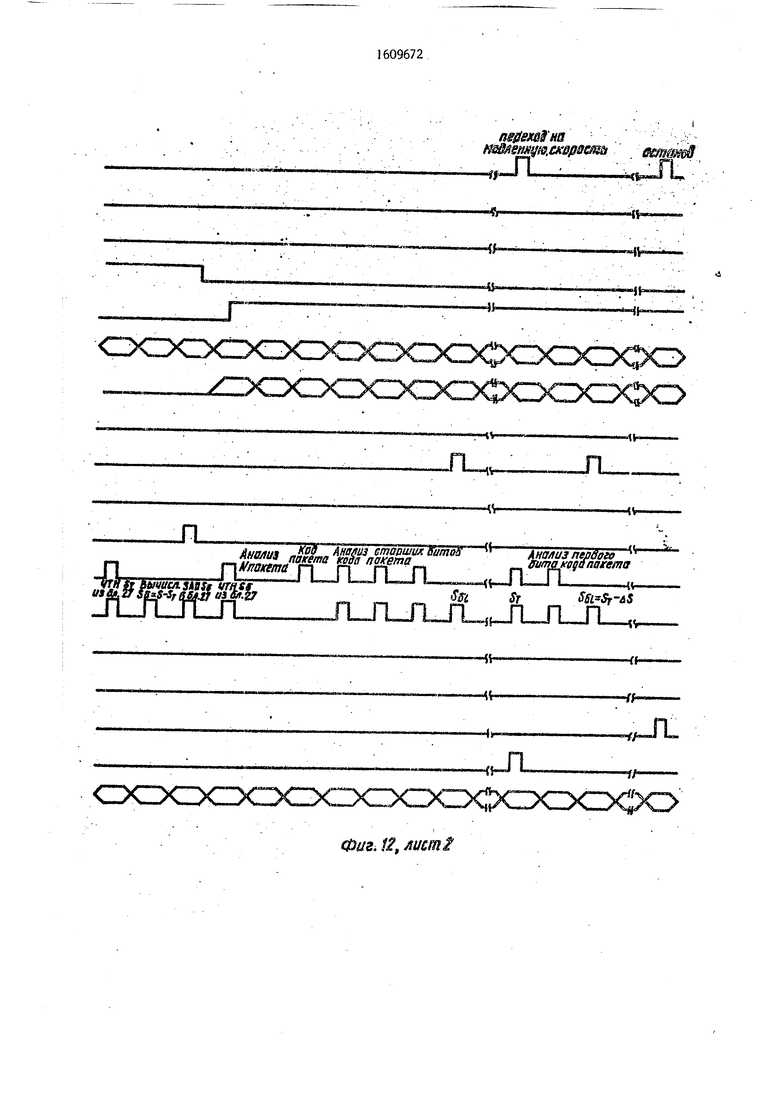
ра 39 поступают основные и смещенные по фазе на 90 последовательности импульсов..На элементах 40, 44 или 41, 45 (фиг.2)(в зависимости от направления движения каретки 2) организовано деление импульсов датчика 22 на коэффициент; К с целью получения информации о расстоянии пердвижения каретки 2 в метрических единицах. На зле- менте сравнення 46 происходит сравнение текущего-расстояния, пройденного кареткой 2, с заданным расстоянием, записанным, в регистре 43. Как только путь, пройденный кареткой 2, станет 30 равнь1М S §4 , поступает команда с блока 24 на вход блока 26, с выхода кото рого .на вход блока 13 поступает коман да перехода на медленную скорость. За тем из блока 27 и вычитатель 36 блока 23 считьшается значение S и в блоке 26 происходит анализ первого бита кода пакета. Если значение первого бита равно 1, то в вычитатель 36 блока 27 считьгоается значение US, подсчитывает
датчика 20, по комачче которох о захва- я разность ST Sr - iS, которая с
ты 10 останавливаются внизу и с блока 11 поступает команда на зажим кирпича пневмозахватами 12. Команда на зажим кирпича с выхода блока 11 поступает
выхода блока 23 записьшается в регист 43 блока 24. Если значение первого би та равно О, то в регистр 43 блока 24 считьшается значение S. Таким образо
также на вход формирователя 30 импуль-д организуется сдвиг слоев друг относи
сов, который формирует короткий пульс. Выход формирователя 30 импульсов соединен со счетным входом распределителя 31 импульсов, на выходах которого после каждой команды на зажим кирпича пневмозахватами формируется номер данного пакета в штабеле в соответствии со схемой укладки. Через вы- .держку времени t, после зажима включается быстрое движение захватов вверх. Точка останова захватов 10 вверху выбирается в зависимости от номера пакета. Если номер пакета , то движение захватов вверх продолжаеттельно друга для повьииения устройчи- вости штабеля.
При движении каретки 2 на медленной скорости к вагонетке 34, аналогич но как и при движении на быстрой скорости, в элементе сравнения 46 блока 24 пгюисходит сравнение текущего расстояния со значением Sт|. Как только эти значения станут равны, поступает команда с блока 24 на вход блока 26j с выхода которого поступает команда на останов каретки 2 в соответствующей с номером пакета точке позициро- вания над вагонеткой 34.
ся до срабатьшания датчика 19, а если .. То до срабатьшания датчика 17. При срабатывании датчика 19 включается быстрое движение каретки 2 к вагонетке 34. При траектории (фиг.1) движение захватов и . Датчик 16 исключает аварийную ситуацию и отключает быстрое движение каретки 2 к вагонет- ,. ке, если при его срабатывании и текущем номере пакета , захваты 10 на
. 22 на входы фазового дискриминато-
ра 39 поступают основные и смещенные по фазе на 90 последовательности импульсов..На элементах 40, 44 или 41, 45 (фиг.2)(в зависимости от направления движения каретки 2) организовано деление импульсов датчика 22 на коэффициент; К с целью получения информации о расстоянии пердвижения каретки 2 в метрических единицах. На зле- менте сравнення 46 происходит сравнение текущего-расстояния, пройденного кареткой 2, с заданным расстоянием, записанным, в регистре 43. Как только путь, пройденный кареткой 2, станет равнь1М S §4 , поступает команда с блока 24 на вход блока 26, с выхода которого .на вход блока 13 поступает коман- да перехода на медленную скорость. Затем из блока 27 и вычитатель 36 блока 23 считьшается значение S и в блоке 26 происходит анализ первого бита кода пакета. Если значение первого бита равно 1, то в вычитатель 36 блока 27 считьгоается значение US, подсчитывает я разность ST Sr - iS, которая с
выхода блока 23 записьшается в регистр 43 блока 24. Если значение первого бита равно О, то в регистр 43 блока 24 считьшается значение S. Таким образом
организуется сдвиг слоев друг относи
тельно друга для повьииения устройчи- вости штабеля.
При движении каретки 2 на медленной скорости к вагонетке 34, аналогично как и при движении на быстрой скорости, в элементе сравнения 46 блока 24 пгюисходит сравнение текущего расстояния со значением Sт|. Как только эти значения станут равны, поступает команда с блока 24 на вход блока 26j с выхода которого поступает команда на останов каретки 2 в соответствующей с номером пакета точке позициро- вания над вагонеткой 34.
При останове каретки 2 включается быстрое движение захватов 10 вниз до срабатывания, датчика 18, который дает команду для перехода на медленную скорость. Движение захватов 10 вниз на медленной скорости продолжается до- срабатывания датчика 20, дает команду в- блок 8 на останов захватов
и в блок 11 для включения разжима L П - логическая переменная, coo-fпича. Через выдержку времени t., после команды на разжим кирпича, включается быстрое движение захватов 10 вверх. Движение вверх происходит до
ветствующая включенному состоянию второго выхода блока II; .L 14, L 17, L 18, L 19, L 20, L 21 - логические переменные, соответствующие
срабатьтания датчика 19 или 17, в за-|5включенным состояниям датчиков 14, 17,
висимости от номера уложенного пакета.18, 19, 20, 21;
При останове захвато-в 10 вверху включается быстрое двотение каретки 2 к накопителю 33. При сраб/1тывании датчика 14 выключается быстрое движение 20
и включается медленное, а при сраба-если . тьщании датчика 15 происходит останов Блок 13:
каретки 2 над накопителем 33 и включа-SL 13 L14 L18 L1I
ется быстрое движ.ение захватов 10RL .13
вниз в исходное положение до срабаты-25SL 13
RL 13„
Т1, Т2 - логические переменные, соответствующие отработанным установкам времени t, tj, в блоке 8; N - логическая переменная, равная 1,
SL 13,
RL 13, L14 SL 13 L26to
вания датчика 19. При получении комац- ды от датчика 21 о наличии пакетов кирпича 32 на накопителе 33 цикл укладки продолжается.
После укладки последнего (п-го) па-ЗО RL 13 L269 кета кирпича в соответствии со схемой укладки и при наличии медленного движения каретки 2 к накопителю 33, происходит сброц распределителя импульсов 31 в исходное состояние. Начинается цикл укладки нового штабеля кирпича.
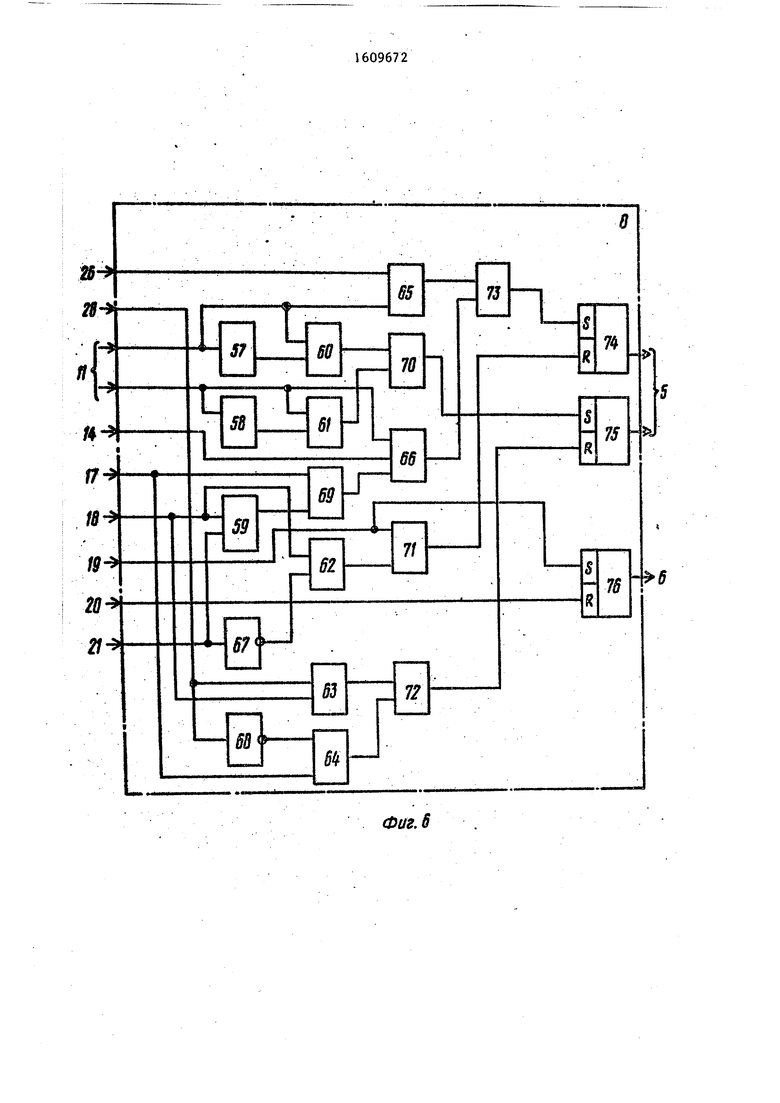
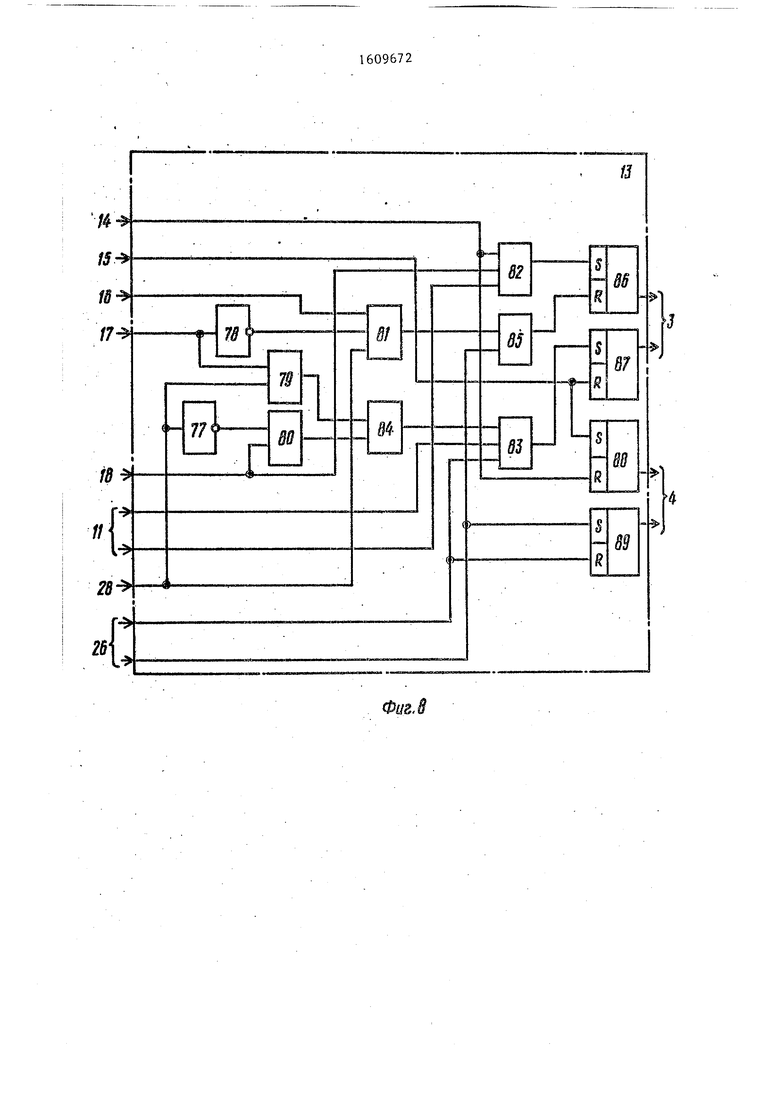
Используя блок-схемы алгоритмов на фиг.5, 7 можно описать логическую структуру блоков 8 и 1-3 следующими логическими уравнениями . 40
L26 3 LI6 L17N L26.LI 1. (N LI + N.L18) LI5 LI5
SL,13;, RL 13 - логические переменные, соответствующие условиям включения и выключения первого выхода блока 13 - комагада Быстро к вагонетке ; 25 SL 13л, RL 13з логические переменные, соотв етствующие условиям включении выключения второго выхода блока 13 - команда Быстро к накопителю ; SL 13, RL 13з - логические переменные, соответствующие условиям включения и выключения третьего выхода блока 13 - команда Медленно к накопителю ;. SL 13, RL 13 - логические переменные, соответствующие условиям включения и выключения четвертого выхода блока 13 - команда Медленно к вагонетке ;
Блок 8: SL а, L2(,
LIL
+ LR-Lll (L17 + LlS
/L21)
RL 8( Lt8.L2I + L19 SL 8 TI.Ll1, + T2-L1l2 RL 82, N Lia + NiL17 SL 8, L19
RL 8, L20
SL 8, RL 8j - логические переменные, соответствующие условиям включения и выключения первого выхода блока 8 - команда Быстро SL 82., RL 8 - логические переменные, соответствующие условиям включения и выключения второго выхода блока 8 - команда Быстро вверх ; SL S-j и RL 83 логические переменные соответствующие условию включения и
выключения третьего выхода блока 8 - команда Медленно L - логическая переменная, соответствующая включенному состоянию девятого выхода блока 26; L 11 - логическая переменная, соответствующая включенному состоянию первого выхода блока 11;
ветствующая включенному состоянию второго выхода блока II; .L 14, L 17, L 18, L 19, L 20, L 21 - логические переменные, соответствующие
18, 19, 20, 21;
Т1, Т2 - логические переменные, соответствующие отработанным установкам времени t, tj, в блоке 8; N - логическая переменная, равная 1,
13
13
13„
13,
13, L14 13 L26to
13 L269
L26 3 LI6 L17N L26.LI 1. (N LI + N.L18) LI5 LI5
RL 13 L269
SL,13;, RL 13 - логические переменные, соответствующие условиям включения и выключения первого выхода блока 13 - комагада Быстро к вагонетке ; SL 13л, RL 13з логические переменные, соотв етствующие условиям включении выключения второго выхода блока 13 - команда Быстро к накопителю ; SL 13, RL 13з - логические переменные, соответствующие условиям включения и выключения третьего выхода блока 13 - команда Медленно к накопителю ;. SL 13, RL 13 - логические переменные, соответствующие условиям включения и выключения четвертого выхода блока 13 - команда Медленно к вагонетке ;
L2f)o- логическая переменная, соответствующая включенному состоянию дет. сятого выхода блока 26; LI5 - логическая переменная, соответствующая включенному состоянию датчика 15.
Используя логические уравнения (1), (2), (3), блоки 8 и 13 могут быть реализованы как на базе микропроцессорных элементов с программируемой структурой, например микросхемы серии К580,
так и на базе элементов комбинированной логики (фиг,6, 8),.
В качестве импульсного датчика угла поворота 22 можно использовать датчик ПДФ-3..
При использовании в качестве эле- , ментной базы системы технических средств ГСП МикроДАТ в качестве блока 24 можно использовать субблок КС34.20 ю в качестве блока 25 можно использовать прибор программирования КВ95.07, блок оперативной памяти 27 может быть выполнен в виде субблока КС54.08. Блок микропрограммного управления 26 вы- 15 полняет свои функции по программе, записанной в перепрограммируемую.память КС54.35, и может быть реализован на базе субблоков: КС57.03, КС25.51, КС36.14, КС59.04, КС54.08, КС63.03. 20
использование данной системы позволит повысить устойчивость штабеля кирпича за счет повышения точности уклад ки пакетов кирпича и возможности one- 25 ративного изменения расстояния торможения. Кроме того, траектория перемещения захватов является функцией номера укладьшаемого пакета кирпича, что уменьшает общее время цикла укладки Q штабеля и соответственно повышает производительность работы автомата-укладчика. Формула изо бретения
Система автоматического управления 5 укладкой кирпича, содержащая первый датчик положения каретки, который со.е- динен с первым входом блока управления движения каретки, второй датчик положения каретки, который соедингн с вто-40 рым входом блока управления движением каретки, с первыми входами блоков управления пневмоприводом захватов и движением захватов, первьш датчик положения захватов соединен с третьим 45 входом блока управления движением каретки и с вторым входом блока управления движением захватов, второй датчик положения захватов соединен с третьим входом блока управления движением зах-;0 ватов, третий датчик положения захватов соединен с четверты -i входом блока управления движением захватов, четвертый датчик положения захватов соединен с пятым входом блока управления движением захватов и вторым входом блока управления пневмоприводом захва- ,тов, первый выход блока управления пневмоприводом захватов соединен с четвеем ра пе да ле с же ка вт за со де ро |пр (вы ре пр вт же ча уп вы дв с во л п ч н в
72
12
вертым входом блока управления движением каретки, шестым входом блока управления движением захватов и с первым входом пускатели пневмопривода захватов, второй выход блока управления пневмоприводом захватов соединен с пятым входом блока управления движением каретки, с седьмым входом блока управления движением захватов и с вторым входом пускателя пневмопривода захватов, выход формиров.ателя импульсов подключен к первому входу респре- делителя импульсов, второй вход которого и первый вход первого пускателя |привода каретки подключены к первому (выходу блока управления движением ка- ретки, второй вход первого пускателя привода движением каретки соединен с вторым выходом блока управления движением каретки, датчик наличия кирпича соединен с восьмым входом блока управления движением захватов, первый и второй выходы блока управления движением з ахватов соединены соответственно с первым и вторым входами первого пускателя привода захватов, о т- личающаяся тем, что, с целью повышения точности управления и увеличения производительности, она снабжена .импульсным датчиком угла поворота, вычислительным блоком, блоком импульсного счета, блоком ввода, блоком микропрограммного управления, блоком оперативной памяти, блоком сравнения, блоком выбора режима, третьим датчиком положения каретки, вторым пускателем привода каретки и вторым пускателем привода захватов, причем привод каретки соединен с импульсным датчиком угла поворота , выходы которого соединены с первым и вторым входами блока импульсного счета,, третий, четвертый и пятый входы которого соединены соответственно с первыми, вторы-- ми и третьими выходами блока микропрограммного управления, четвертый, пятый и адресный выходы которого соединены соответственно с первым, вторым и -адресным входами блока оперативной памяти, информационный вход которого соединен с информационным выходом вычислительного блока, информационным выходом блока импульсного счета и информационным выходом блока ввода вход которого соединен с первым выходом блока выбора режима, второй и третий выходы которого, соединены соответственно с первым и вторым входами пер
вого пускателя привода каретки, четвертый, пятый и шестой выходы блока выбора режима соединены соответственно с первым, вторым и третьим входами блока микропрограммного управления, шестой выход которого соединен с шестым входом блока управления движением каретки, седьмой вход которого соединен с третьим датчиком положения каретки, третий датчик положения захва- jTOB соединен с восьмым входом блока управления движением каретки, девятый вход которого и девятый вход блока управления захватов соединены с первым выходом блока сравнения, десятые входы блоков управления движением каретки и захватов соединены с седьмым выходом блока микропрограммного управления, восьмой и девятый выходы кото- рого соединены с соответсвующими входами блока сравнения, второй выход которого соединен с третьим входом распределителя импульсов, первые информационные входы блока микропрограммного
управления, блока импульсного счета, блока сравнения и информационный вход вычислительного блока соединены с информационным выходом блока оперативной памяти, вторые информационные входы блока сравнения и блока микропрограммного управления соединены с информационным выходом распределителя импульсов, второй информационный вход бло°- ка импульсного счета соединен с информационным выходом вычислительного блока, вход формирователя импульсов соединен с вторым выходом блока управления пневмоприводом захватов, входы второго пускателя привода каретки соединены соответственно с третьим . и четвертым выходами блока управления движением захватов, вход второго пускателя движения захватов подключен к третьему выходу блока управления движением захватов,а выходы вторых пускателей приводов каретки и захватов сое-, динены соответственно с соответствующими приводами.
л
ФтЗ
ФагЛ
Фиг. 6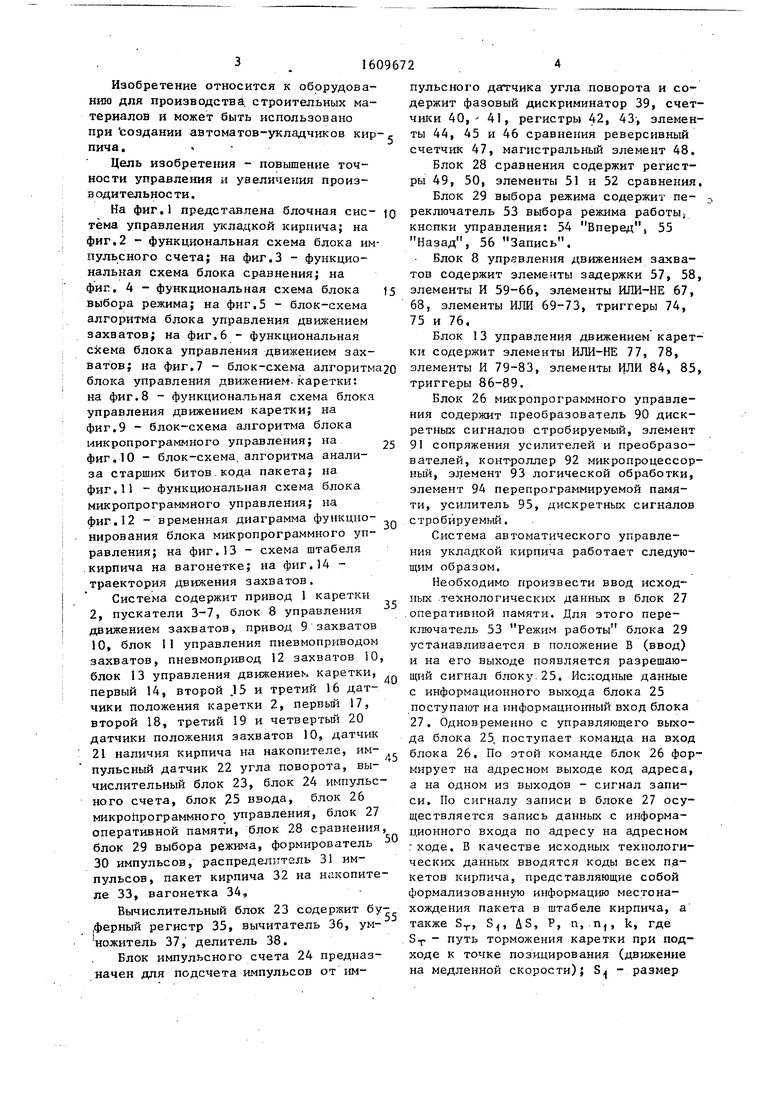
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Система автоматического управления укладкой кирпича | 1985 |
|
SU1315325A1 |
| Система автоматического управления укладкой кирпича | 1984 |
|
SU1265049A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Устройство для штабелирования и разборки штабеля листовых изделий | 1988 |
|
SU1708724A1 |
| Устройство для автоматического управления укладкой кирпича | 1983 |
|
SU1209544A1 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Система автоматического управления укладкой кирпича | 1977 |
|
SU662357A1 |
| Устройство для измерения массы нетто | 1987 |
|
SU1502964A1 |
Изобретение относится к оборудованию для производства строительных материалов, может быть использовано при создании автоматов-укладчиков, позволяет повысить точность управления и увеличить производительность, содержит привод 1 каретки2, пускатели 3,4,5,6 и 7, блок 8 управления движением захватов, привод 9 захватов 10, блок 11 управления пневмоприводом захватов, пневмопривод 12 захватов 10, блок 13 управления движением каретки, датчики 14,15 и 16 положения каретки, датчики 17,18,19 и 20 положения захватов, датчик 21 наличия кирпича, импульсный датчик 22 угла поворота, вычислительный блок 23, блок 24 импульсного счета, блок 25 ввода, блок 26 микропрограммного управления, блок 27 оперативной памяти, блок 28 сравнения, блок 29 выбора режима, формирователь 30 импульсов, распределитель 31 импульсов. 14 ил., 1 табл.
фиг. 7
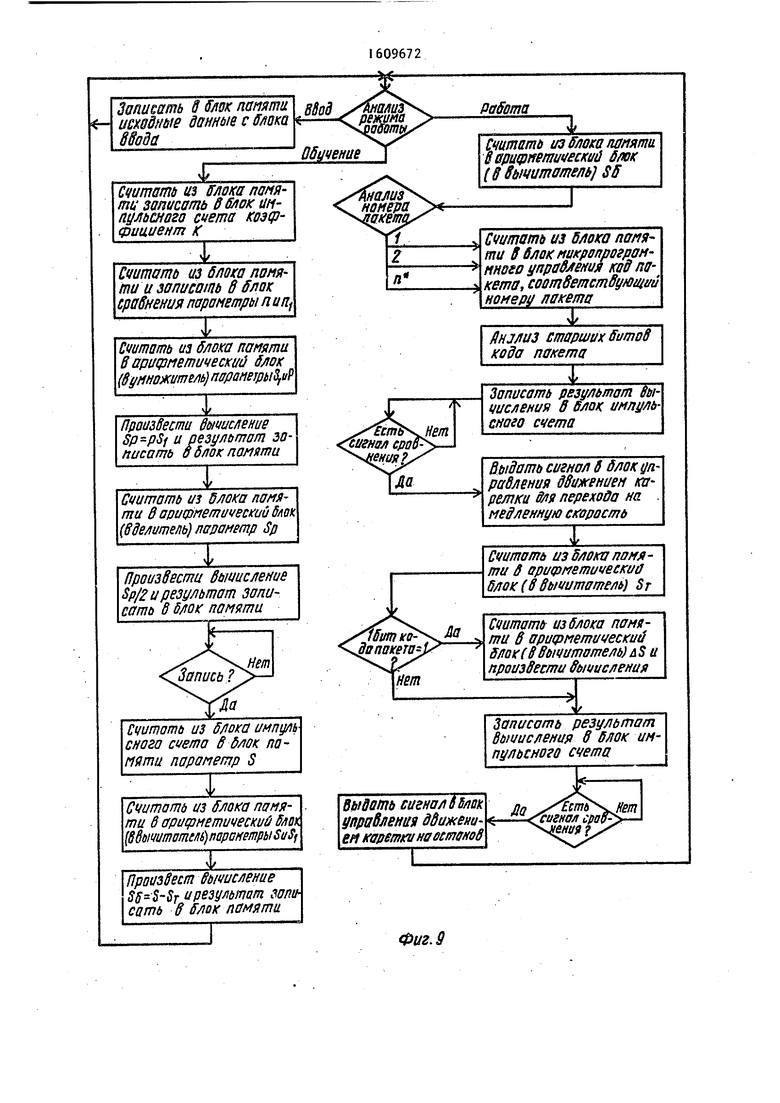
Sanuesmb SSMKMnmn ucxodfiaie доннт с ff/iOKO 6Soba
Считать из fMxa памяти записать в блок т- пульсного счета коэ(р- Финиент К
Считать из блага памяти и золисот 8 ёлок срабнения параметры пищ
Считать аз блока памяти. В ариозпетический S/IOK (8ff/iffu)Kt/ffje/ji)nffflaMerpbiS,BP
i.
Произвести бычисиение и результат записать о блок памяти
Считать из Влока памяти 8 aQUQinemuvecKuu 6AOtt. (Sde/ii/me/ib) паранетр Sp
Произвести бошисление Spl2 и результат записать 8 6/IQK патта
Считать из блока импдль снага cvema 8 б/гок памяти параметр S
Biiidatnb сигнал о Шк управления ддижени- М ifapmKUHaenffiOKoe
i
npoasSecrn Вычисление и результат написать 6 блок памяти.
Работа
Считать la блока/шмяти. S врифнбтический 6/юк {88ычитатель SB
Считать из блока па пути В блок микропрагран- HH8SO упрадления каа пакета, саотбетстВующай на и еру пакета
fiHJflus старших батав кода пакета
Записать резу/игтат числения В б/1ок импуль- смага счета
Выдать сигнал б блак1/п- радления дВижениен каретки для перехода ма медленную скорость
Считать из5ло1 апаг я- ти б арифметический 6лок(в81 1читатель) Sr
CQumamif из блока памяти в арифметический (8Вб1читотель)лЗ и произЗесши 9д1числеиия
Написать результат Вычисления 8 блок импульсного счета
Фиг. 9
5/
Ла
Cvitmmt из пвнялш 8 ацашнетачккий 9лвк(в8н- vumsmeM) мванетр s/j и произвести obivumoHue
еюзтатл аз бткп понята в apuVHemovecruiSenoKi вЪы- читшть) ndpaiiempsf а кршзвеаЛа Iwvamsnae
Считать usSjioim понята 8арисрнетическай Улвк(8 fuvumamejit) пвранетр Sf и произвести ffuyamfnae
Шина адреса
2f
23
:}Фив. 12,Mcm1
.., . ..
-.
Jl
vffi«ir SrS S Анализ первого Unnrfma г #2. пакетащипакоабпвгета
,-- -Ji: 22 rOOiZn jiTi
Tt S «raiSiEw M - - - --((-I I1 1
. /f,
., . ..
nffHexai M t sBAsmij(9,CK0pacm
-.
.
| Система автоматического управления укладкой кирпича | 1984 |
|
SU1265049A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Система автоматического управления укладкой кирпича | 1985 |
|
SU1315325A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
