Изобретение относится к способу и устройству измерения турбулентности воздуха вокруг летательного аппарата, в частности транспортного самолета.
Более конкретно, хотя и не исключительно, измеряемую турбулентность можно использовать для оценки имитирующих моделей, которые можно использовать для проверки характеристик самолета в лабораторных условиях, при проектировании или до полета этого летательного аппарата; и, в частности, для выбора наиболее действенной модели из числа возможных теоретических моделей.
Для этих целей необходимо особо точное и надежное выполнение измерений.
Известно, что помимо естественной однородности поля аэродинамической скорости (или поля турбулентности) вокруг летательного аппарата также имеется возмущение этого поля вблизи него, нередко - на расстоянии свыше нескольких десятков метров, которое создается при пролете летательного аппарата. Это возмущение остается в турбулентном следе, создаваемом при пролете летательного аппарата. Эти обстоятельства затрудняют выполнение точных измерений.
Изобретение относится к эффективному и надежному способу измерения турбулентности воздуха вокруг летательного аппарата, в частности транспортного самолета; причем этот способ обеспечивает возможность устранения упомянутых недостатков.
Согласно изобретению упомянутый способ характеризуется следующим:
а) во время полета летательного аппарата выполняют двенадцать измерений аэродинамической скорости вокруг упомянутого летательного аппарата при помощи установленных на летательном аппарате лидаров; причем упомянутые измерения выполняют в четырех разных точках измерения, всегда согласно трем заданным осям; и
б) при помощи упомянутых двенадцати измерений и заданной математической модели первого порядка, описывающей поле аэродинамической скорости как функцию двенадцати переменных, определяют поле аэродинамической скорости вокруг летательного аппарата, характеризующее упомянутую турбулентность воздуха.
Таким образом, при помощи такого изобретения получают особо точное и надежное измерение турбулентности. В частности:
- с одной стороны, в связи с использованием лидаров различные точки измерения удалены от летательного аппарата, и поэтому, как упомянуто ниже, обеспечивается возможность выполнения измерений в зонах, не изменяемых при пролете летательного аппарата, и, поэтому, возможность измерения фактической турбулентности; и
- с другой стороны, упомянутая математическая модель (первого порядка, описывающая поле аэродинамической скорости как функцию двенадцати переменных), которую используют для определения турбулентности, учитывает гипотезу, согласно которой поле аэродинамической скорости не является единообразным в разных точках измерения, что соответствует действительности. Эта модель учитывает, с одной стороны, гипотезу, согласно которой первые производные в поле аэродинамической скорости являются единообразными, тем самым предполагая использование двенадцати переменных (три составляющих и девять первых производных).
Известно, что турбулентность воздуха вызывается неединообразным полем аэродинамической скорости и поэтому представляет собой беспорядочное возмущение воздуха, подвергающегося течению, в котором элементарные струйки перемешиваются вместо сохранения своей индивидуальности.
Помимо этого, лидар является устройством, позволяющим определять положение и расстояние до препятствия за счет отражения от него оптического светящегося излучения, обычно испускаемого лазером. Термин «лидар» (лазерный локатор) является сокращением фразы «световое детектирование и измерение дальности» [Light Detection and Ranging]. Работа лидара основана на принципе транспонирования применяемого в радиоэлектронике принципа радара в область оптики и свечения.
Каждый лидар измеряет, в назначенной ему точке измерения, три составляющих аэродинамической скорости соответственно в соответствии с упомянутыми тремя заданными осями: измеряет для каждой составляющей эффект Доплера лазерного луча, испускаемого или обратно рассеиваемого частицами, присутствующими в заданном объеме вокруг упомянутой точки измерения.
На этапе а), в первом осуществлении используют четыре лидара, каждый из которых выполняет измерения в одной из упомянутых четырех точек; и во втором предпочтительном осуществлении используют три лидара, из которых два выполняют каждое из измерений в одной из упомянутых точек измерения, и третий лидар выполняет измерения в двух последующих моментах во время полета летательного аппарата, чтобы тем самым можно было выполнять измерения в двух разных точках измерения, которые соответствуют двум остающимся точкам измерения.
В рамках данного изобретения упомянутые лидары можно расположить в любом месте на летательном аппарате, где они смогут выполнять упомянутые измерения (при том условии, что выбранные места будут разными по отношению друг к другу). Но в конкретном осуществлении, применимом для упомянутого второго предпочтительного осуществления, упомянутые лидары соответственно расположены на первом переднем правом иллюминаторе, первом переднем левом иллюминаторе и на крыле летательного аппарата.
Далее предпочтительно, если упомянутые заданные оси отходят от летательного аппарата и ориентированы вперед. Таким образом используемая система отсчета привязана к летательному аппарату.
Изобретение также относится к устройству для измерения турбулентности воздуха вокруг летательного аппарата.
Согласно изобретению упомянутое устройство характеризуется тем, что содержит:
- систему измерения, содержащую лидары, которые установлены на летательном аппарате и которые выполняют в полете летательного аппарата двенадцать измерений аэродинамической скорости вокруг упомянутого летательного аппарата; при этом упомянута система измерения выполняет упомянутые измерения в четырех разных точках измерения, всегда согласно трем заданным осям; и
- центральный блок, который - при помощи измерений, выполняемых упомянутой системой измерения, и при помощи заданной математической модели первого порядка, описывающей поле аэродинамической скорости как функцию двенадцати переменных, - определяет поле аэродинамической скорости, присутствующее вокруг летательного аппарата и характеризующее упомянутую турбулентность воздуха.
В первом осуществлении упомянутый центральный блок установлен на летательном аппарате и определяет турбулентность воздуха во время полета летательного аппарата.
Во втором предпочтительном осуществлении устройство согласно изобретению также содержит записывающее средство для записи в базе данных измерений, выполняемых упомянутой системой измерения; и упомянутый центральный блок определяет турбулентность воздуха на земле после полета по измерениям, записанным в полете в упомянутой базе данных.
Упомянутая система измерения также содержит:
- либо четыре лидара, каждый из которых выполняет измерения в одной из упомянутых четырех точек измерения;
- либо три лидара. В этом случае два из упомянутых лидара выполняют каждое из измерений в одной из упомянутых точек измерения, и третий лидар выполняет измерения в двух последовательных моментах во время полета летательного аппарата, чтобы таким образом можно было выполнять измерения в двух разных точках измерения, соответствующих двум остальным точкам измерения. В этом примере упомянутые лидары соответственно расположены в первом переднем правом иллюминаторе, первом переднем левом иллюминаторе и на крыле летательного аппарата.
Прилагаемый чертеж поясняет возможную реализацию изобретения. Чертеж представляет собой блок-схему измерительного устройства согласно изобретению.
Устройство 1 согласно изобретению, схематически представленное на чертеже, предназначено для измерения турбулентности воздуха вокруг летательного аппарата (не показано), в частности транспортного самолета. Известно, что турбулентность воздуха соответствует возмущению, налагаемому на усредненное движение воздуха, и состоит из беспорядочных, непрерывно трансформирующихся движений. Турбулентность встречается внутри или вблизи облаков (например - в грозовом облаке, в котором сосуществуют противоположно направленные вертикальные потоки). В безоблачном небе турбулентность также происходит либо вблизи земли, либо особенно на очень большой высоте вблизи реактивных потоков.
Согласно изобретению упомянутое измерительное устройство 1 содержит:
- систему 2 измерения, содержащую множество лидаров L1, L2, L3, L4. Эти лидары L1, L2, L3, L4, перечисляемые ниже, установлены на летательном аппарате и предназначены для выполнения, в полете упомянутого летательного аппарата, упоминаемых ниже двенадцати измерений М1-М12 аэродинамической скорости согласно приводимым ниже пояснениям. Эти измерения М1-М12 выполняют за бортом летательного аппарата вблизи него, но, тем не менее, по меньшей мере на заданном расстоянии от упомянутого летательного аппарата, например на расстоянии 30 м, по меньшей мере. Упомянутая система 2 измерения обеспечивает выполнение упомянутых двенадцати измерений в четырех разных точках измерения, всякий раз с тремя измерениями в данной точке измерения, соответственно согласно трем заданным осям X, Y, Z; и
- центральный блок 3, который с помощью измерений, выполняемых упомянутой системой 2 измерения, и при помощи интегральной математической модели определяет поле аэродинамической скорости в упомянутой близости от летательного аппарата, характеризующее упомянутую турбулентность воздуха. Эта математическая модель является моделью первого порядка, которая описывает поле аэродинамической скорости как функцию двенадцати переменных.
При помощи этого изобретения обеспечивают особо точное и надежное измерение турбулентности. В частности:
- с одной стороны, за счет применения лидаров L1, L2, L3, L4 разные точки измерения удалены от летательного аппарата, в результате чего возможно:
* выполнение измерений в зонах, не затронутых возмущением от пролета летательного аппарата; и поэтому
* измерение фактической турбулентности атмосферы по траектории летательного аппарата, но в удалении от возмущений, создаваемых летательным аппаратом; и
- с другой стороны, упомянутая математическая модель (первого порядка, описывающая поле аэродинамической скорости как функцию двенадцати переменных), используемая для определения турбулентности, учитывает гипотезу, согласно которой поле аэродинамической скорости не является единообразным в разных точках измерения, что соответствует действительности. Эта модель учитывает, с другой стороны, гипотезу, согласно которой первые производные в упомянутом поле аэродинамической скорости являются единообразными, тем самым предполагая использование двенадцати переменных (три составляющих и девять первых производных, упоминаемых ниже).
Лидары L1, L2, L3, L4 являются устройством, позволяющим определять положение и расстояние до препятствия за счет отражения ими оптического светящегося излучения. Термин «лидар» происходит от сокращения фразы «световое детектирование и измерение дальности» [Light Detection and Ranging]. Работа лидара основана на принципе транспонирования применяемого в радиоэлектронике принципа радара в область оптики или свечения.
Каждый лидар L1, L2, L3, L4 измеряет в соответствующей точке измерения три составляющих аэродинамической скорости соответственно в соответствии упомянутыми заданными тремя заданным осями X, Y и Z, измеряет для каждой составляющей эффект Доплера лазерного луча, испускаемого или обратно рассеиваемого частицами, естественно присутствующими в заданном объеме вокруг упомянутой точки измерения.
В первом осуществлении устройство 1 согласно изобретению содержит четыре лидара L1, L2, L3, L4. Каждый из этих четырех лидаров L1-L4 выполняет три измерения на одной из упомянутых четырех точек.
Во втором предпочтительном осуществлении упомянутое устройство 1 содержит только три лидара L1, L2 и L3. Первый лидар L1 выполняет три измерения в первой из упомянутых точек измерения; второй лидар L2 выполняет три измерения во второй из упомянутых точек измерения и третий лидар L3 выполняет три измерения всякий раз в одном и том же положении по отношению к летательному аппарату, но в двух последовательных моментах во время полета летательного аппарата, чтобы таким образом можно было выполнять измерения в двух разных точках измерения (находящихся друг от друга на расстоянии, характеризующем полет летательного аппарата между этими двумя моментами).
В рамках данного изобретения упомянутые лидары L1, L2, L3, L4 можно расположить в любом местоположении (на летательном аппарате), где они могут выполнять упомянутые измерения (при том условии, что эти местоположения взаимно разные). Согласно конкретному осуществлению применительно к самолету и во втором излагаемом выше предпочтительном осуществлении: упомянутые лидары L1, L2 и L3 соответственно расположены на первом переднем правом иллюминаторе, первом переднем левом иллюминаторе и на крыле самолета.
Упомянутые оси X, Y и Z отходят от летательного аппарата и соответствуют, например, в случае самолета продольной оси самолета, причем средняя ось проходит через крылья и расположена под прямым углом по отношению к упомянутой продольной оси и оси, которая перпендикулярна к плоскости, образуемой двумя предыдущими осями.
В продольном направлении точки измерения должны быть достаточно удалены от летательного аппарата, например - на 30 м, и на них не должны воздействовать создаваемые летательным аппаратом возмущения. Помимо этого, в боковом направлении две точки измерения должны достаточно далеко отстоять друг от друга, чтобы можно было выполнять разные измерения, но не слишком далеко, чтобы удовлетворять линейным приближениям, учитываемым в теоретической модели. Боковое расстояние между двумя точками измерения предпочтительно не должно превышать размаха крыла летательного аппарата.
Как указано выше, центральный блок 3 определяет турбулентность воздуха (в виде поля аэродинамической скорости) при помощи математической модели первого порядка, которая описывает поле аэродинамической скорости как функцию двенадцати переменных.
Двенадцать переменных, учитываемых в этой математической модели:
- три составляющих Wx, Wy, Wz воздушного потока W в соответствии с упомянутыми осями X, Y и Z;
- три первых производных воздушного потока W по оси Х:
dWx/dx, dWy/dx, dWz/dx;
- три первые производные воздушного потока W по оси Y: 
dWx/dу, dWy/dу, dWz/dу и
- три первые производные воздушного потока W по оси Z:
dWx/dz, dWy/dz, dWz/dz.
Конкретнее, упомянутый центральный блок 3 определяет упомянутое поле аэродинамической скорости - по упомянутой математической модели и упомянутым измерениям, учитывая следующее.
На основании упомянутых составляющих воздушного потока и градиентов можно вычислить три составляющих воздушного потока в произвольной точке пространства. Для точки Р, определенной в системе отсчета, привязанной к летательному аппарату, три составляющие воздушного потока соответствуют линейной комбинации составляющих воздушного потока и градиентов. Если точка Р является точкой, в которой лидар L1, L2, L3, L4 делает измерение, то это измерение проецируют на направление измерения трех составляющих воздушного потока. Это проецирование линейное. Для каждой точки измерения Р поэтому существует линейное соотношение между составляющими воздушного потока и градиентами, с одной стороны, и измерениями каждого лидара, с другой стороны. Можно записать это соотношение в виде матрицы. Если М - вектор двенадцати измерений лидаров L1, L2, L3 и L4; V - вектор составляющих воздушного потока и градиентов и N - матрица, их связывающая, то получается следующее соотношение:
M=N·V,
где
Матрица N зависит от направлений измерений, положений лидаров L1, L2, L3, L4 на летательном аппарате и от расстояний измерения упомянутых лидаров L1, L2, L3, L4.
Поэтому можно вычислить составляющие оцениваемого воздушного потока  с помощью следующего выражения:
с помощью следующего выражения:
 =N-1·M,
=N-1·M,
где N-1 является матрицей, обратной N.
Следует отметить, что согласно изобретению система 2 измерения испускает столько измерительных лучей, сколько необходимо в оптимизированных направлениях, и центральный блок 3 выполняет обработку упомянутых измерений, в результате чего можно уйти от технических и монтажных ограничений, в частности - в отношении положения точек измерения, и устранить влияние того факта, что измеряемая скорость является проекцией аэродинамической скорости на ось зрения (или на ось испускания измерительного луча).
Результаты обработки, выполняемой упомянутым центральным блоком 3, можно передать по линии 5 связи в обычное информационное средство 6, например - на экран или принтер, чтобы предоставить упомянутые результаты оператору.
В первом осуществлении упомянутый центральный блок 3 установлен на летательном аппарате и подключен линией 4 связи к упомянутой системе 2 измерения. Таким образом выполняют определение турбулентности воздуха непосредственно во время полета летательного аппарата с помощью измерений, выполняемых во время этого полета.
С другой стороны, во втором осуществлении, которое частично представлено пунктирными линиями на чертеже: измерительное устройство 1 также содержит записывающее средство 10, подключенное линией 8 связи к упомянутой системе 2 измерения и записывающее в полете в своей базе 7 данных измерения, выполняемые упомянутой системой 2 измерения. Эти результаты можно передать на землю по линии 9 связи (подвижная линия передачи данных) в центральный блок 3. Упомянутый центральный блок 3 определяет в этом случае турбулентность воздуха на земле после полета с помощью измерений, зарегистрированных в упомянутой базе 7 данных во время полета и передаваемых по упомянутой линии 9 связи.
Помимо этого, как указано выше, каждый лидар L1, L2, L3 и L4 выполняет три измерения. Эти измерения выполняют в направлениях, которые не обязательно должны быть параллельными осям Х, Y и Z летательного аппарата. Эти направления не обязательно должны быть перпендикулярными. Они оптимизированы для улучшения качества измерений. Их вполне можно дифференцировать таким образом, чтобы числовое обращение матрицы N смогло обеспечить возможность сохранения хорошей точности. Они также удовлетворяют другим условиям: они ориентированы к зонам в пространстве, где поле аэродинамической скорости в наименьшей степени затронуто пролетом самолета. В частности, все наиболее целесообразные точки находятся в направлении перед летательным аппаратом, и многие ориентированы вверх (и вперед).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477893C1 |
| Воздухозаборное устройство сверхзвукового прямоточного воздушно-реактивного двигателя, интегрированного с корпусом летательного аппарата | 2020 |
|
RU2747333C1 |
| Способ управления положением модели в аэродинамической трубе | 2017 |
|
RU2660225C1 |
| Способ экспериментальных исследований аэромеханики и динамики полёта беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2767584C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2496121C1 |
| Способ и лидарная система для оперативного обнаружения турбулентности в ясном небе с борта воздушного судна | 2023 |
|
RU2798694C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2724937C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ НАГРУЗКИ ОПОРЫ ШАССИ, ОПОРА ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ, ИСПОЛЬЗУЮЩИЕ НАЗВАННУЮ СИСТЕМУ | 2006 |
|
RU2416548C2 |
| СПОСОБ ОБЪЕМНОЙ РЕКОНСТРУКЦИИ ЭЛЕКТРОФИЗИЧЕСКОЙ МОДЕЛИ ПОДПОВЕРХНОСТНОЙ СРЕДЫ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОЙ ЭЛЕКТРОМАГНИТНОЙ СИСТЕМЫ | 2024 |
|
RU2836589C1 |
Группа изобретений относится к технике оценки условий полета летательного аппарата. Предложены способ и устройство для измерения турбулентности воздуха вокруг летательного аппарата. Устройство содержит систему измерения, включающую в себя лидары, установленные на летательном аппарате с возможностью осуществления в полете двенадцати измерений аэродинамической скорости вокруг летательного аппарата. Система измерения выполняет упомянутые двенадцать измерений в четырех разных точках измерения, всякий раз по трем заданным осям. Имеется центральный блок, который при помощи измерений, выполняемых упомянутой системой измерения, и заданной математической модели первого порядка, описывающей поле аэродинамической скорости на основании двенадцати переменных, определяет поле аэродинамической скорости вокруг летательного аппарата. Данное поле характеризует турбулентность воздуха вокруг летательного аппарата. Группа изобретений обеспечивает измерение турбулентности с повышенными точностью и надежностью. 3 н. и 10 з.п. ф-лы, 1 ил.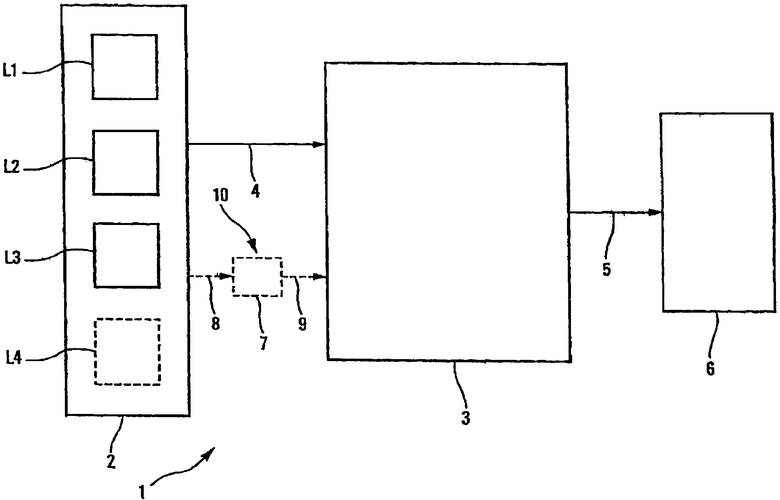
1. Способ измерения турбулентности воздуха в окружении летательного аппарата, в котором
а) во время полета летательного аппарата выполняют двенадцать измерений аэродинамической скорости во внешнем окружении упомянутого летательного аппарата посредством лидаров, установленных на летательном аппарате; причем упомянутые измерения выполняют в четырех разных точках измерения, всегда согласно трем заданным осям, и
б) при помощи упомянутых двенадцати измерений и заданной математической модели первого порядка, описывающей поле аэродинамических скоростей как функцию двенадцати переменных, определяют поле аэродинамических скоростей, которое существует в окружении летательного аппарата, характеризующее упомянутую турбулентность воздуха, при этом математическая модель учитывает:
три составляющих Wx, Wy, Wz воздушного потока W в соответствии с упомянутыми осями X, Y и Z;
три первых производных воздушного потока W по оси X:
dWx/dx, dWy/dx, dWz/dx;
три первые производные воздушного потока W по оси Y:
dWx/dy, dWy/dy, dWz/dy; и
три первые производные воздушного потока W по оси Z:
dWx/dz, dWy/dz, dWz/dz.
2. Способ по п.1, в котором каждый лидар измеряет в упомянутой точке измерения три составляющих аэродинамической скорости соответственно согласно упомянутым трем заданным осям путем выполнения для каждой составляющей измерения эффекта Доплера лазерного луча, испускаемого и обратно рассеиваемого частицами, находящимися в заданном объеме вокруг упомянутой точки измерения.
3. Способ по п.1, в котором на этапе а) используют четыре лидара (L1, L2, L3, L4), каждый из которых выполняет измерения в одной из упомянутых четырех точек измерения.
4. Способ по п.1, отличающийся тем, что на этапе а) используют три лидара (L1, L2, L3), при этом два из упомянутых лидаров выполняют, каждый, измерения в одной из упомянутых точек измерения, причем третий лидар выполняет измерения в двух последовательных моментах во время полета летательного аппарата, чтобы таким образом можно было выполнять измерения в двух разных точках измерения, которые соответствуют двум оставшимся точкам измерения.
5. Способ по п.4, в котором упомянутые лидары (L1, L2, L3) соответственно расположены на первом переднем правом иллюминаторе, первом переднем левом иллюминаторе и на крыле летательного аппарата.
6. Способ по п.1, в котором упомянутые заданные оси зависят от летательного аппарата.
7. Устройство для измерения турбулентности воздуха в окружении летательного аппарата, которое содержит:
систему (2) измерения, содержащую лидары, установленные на летательном аппарате и предназначенные для выполнения во время полета летательного аппарата двенадцати измерений аэродинамической скорости во внешнем окружении упомянутого летательного аппарата, причем упомянутая система (2) измерения выполняет упомянутые двенадцать измерений в четырех разных точках измерения, всякий раз в соответствии с тремя заданными осями, и
центральный блок (3), который с помощью измерений, выполняемых упомянутой системой (2) измерения, и математической модели первого порядка, описывающей поле аэродинамических скоростей как функцию двенадцати переменных, определяет поле аэродинамических скоростей, которое существует в окружении летательного аппарата, характеризующее упомянутую турбулентность воздуха, при этом математическая модель учитывает:
три составляющих Wx, Wy, Wz воздушного потока W в соответствии с упомянутыми осями X, Y и Z;
три первых производных воздушного потока W по оси X:
dWx/dx, dWy/dx, dWz/dx;
три первые производные воздушного потока W по оси Y:
dWx/dy, dWy/dy, dWz/dy; и
три первые производные воздушного потока W по оси Z:
dWx/dz, dWy/dz, dWz/dz.
8. Устройство по п.7, в котором упомянутый центральный блок (3) установлен на летательном аппарате и определяет турбулентность воздуха во время полета летательного аппарата.
9. Устройство по п.7, в котором также содержится записывающее средство (10) для записи в базе (7) данных измерений, выполняемых упомянутой системой (2) измерения, при этом упомянутый центральный блок (3) определяет турбулентность воздуха на земле после полета с помощью измерений, записанных в упомянутой базе (7) данных во время полета.
10. Устройство по п.7, в котором упомянутая система (2) измерения содержит четыре лидара (L1, L2, L3, L4), каждый из которых выполняет измерения в одной из упомянутых четырех точек измерения.
11. Устройство по п.7, в котором упомянутая система (2) измерения содержит три лидара (L1, L2, L3), при этом два из упомянутых лидаров выполняют, каждый, измерения в одной из упомянутых точек измерения, причем третий лидар выполняет измерения в двух последовательных моментах во время полета летательного аппарата, чтобы таким образом можно было выполнять измерения в двух разных точках измерения, которые соответствуют двум оставшимся точкам измерения.
12. Устройство по п.11, в котором упомянутые лидары (L1, L2, L3) соответственно расположены на первом переднем правом иллюминаторе, первом переднем левом иллюминаторе и на крыле летательного аппарата.
13. Летательный аппарат, содержащий устройство (1) по п.7.
| US 5648604 А, 15.07.1997 | |||
| US 6297878 B1, 02.10.2001 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для определения параметров турбулентности в атмосферном пограничном слое | 1989 |
|
SU1714551A1 |

