Изобретение относится к области авиационной испытательной техники, в частности к методам и средствам исследования аэромеханики и динамики полета беспилотных летательных аппаратов. Изобретение может быть также использовано для обучения студентов в образовательных учреждениях.
Беспилотные летательные аппараты (БИЛА) по объему продаж уже занимают значительную часть мирового рынка. Потребность в беспилотных летательных аппаратах увеличивается благодаря быстрому развитию многочисленных приложений этих аппаратов в промышленности, сельском хозяйстве, в наблюдении за изменениями климата и экологического состояния территории и др.
В настоящее время в США и в Европе правила регулирования полетов в общем воздушном пространстве существенно упрощены для малых БИЛА, у которых вес не превышает 25 кг. При этом за надежность БПЛА, за безопасность его полетов для окружающей среды, включая людей и животных, отвечает проектировщик и производитель, как это принято в «большой» авиационной промышленности. Поэтому на всех этапах жизненного цикла существует необходимость экспериментальных исследований БПЛА и подтверждения их характеристик. Для проведения таких исследований необходимо лабораторное оборудование, которое позволит воспроизводить аэродинамические и инерционные силы, действующие на БПЛА в полете. Необходимо при этом принять во внимание, что на исследуемом экземпляре БПЛА должны быть установлены и должны функционировать, в соответствии с воспроизводимой программой полета, все механизмы, моторы, устройства силовой электроники, пропеллеры и т.п. Частично экспериментальные исследования такого рода можно было бы выполнить на установках типа традиционных аэродинамических труб. Однако в существующих аэродинамических трубах невозможно регулировать скорость воздушного потока так быстро, как это требуется для исследований динамики полета современных БПЛА. Также необходимо отметить, что использование существующих аэродинамических труб для испытаний малых БПЛА экономически нецелесообразно.
Следует отметить, что предлагаемый лабораторный стенд нового типа для испытаний малых БПЛА может быть использован в научно-исследовательских, производственных и образовательных организациях для проведения исследований и обучения студентов по тематике курсов аэродинамики, динамики полета, систем управления летательными аппаратами и др.
БПЛА малых размеров неизбежно должны летать на режимах, для которых характерны малые числа Рейнольдса (Re). Результаты исследований, приведенные в работах [Брусов B.C., Петручик В.П. Проблемы исследования аэромеханики полета беспилотных летательных аппаратов сверхмалой размерности // Вестник МАИ, Т. 18, №2, 2011. с. 9-14], показывают, что при малых числах Re наблюдаются явления гистерезиса аэродинамических характеристик (подъемной силы и сопротивления) крыла. При ускорении летательного аппарата коэффициент подъемной силы крыла Су растет, а при торможении уменьшается. При этом, когда достигаются достаточно малые числа Re, снижение величины подъемной силы происходит скачкообразно. Следовательно, важно точно регулировать не только скорость, но и ускорение (замедление) воздушного потока при экспериментальных исследованиях аэромеханики и динамики полета беспилотных летательных аппаратов.
Известен способ определения аэродинамических характеристик воздушных судов RU (2460982 С1, 28.03.2011). Способ включает исследование модели воздушного судна (ВС) в аэродинамической трубе и проведение летных испытаний. В качестве наблюдаемых параметров принимаются суммарные значения коэффициентов аэродинамических сил и моментов, вычисленные на основе измерений параметров в полете, а в качестве заданных функций, с помощью которых строится структурная или конструкционная матрица при идентификации по методу наименьших квадратов, используют функции, являющиеся составляющими коэффициентов аэродинамических сил и моментов в модели аэродинамических характеристик, полученной на основе продувок в аэродинамических трубах.
Известен способ, принятый за прототип, для определения аэродинамических характеристик летательного аппарата (RU 2561829 С2, 22.08.2013). Способ заключается в том, что АДХ ЛА определяются в гидродинамической трубе (ГТ) при использовании в качестве среды обтекания ЛА воды. Модель ЛА устанавливают в ГТ, закрепляют в верхней державке головную часть модели и в нижней державке хвостовую часть модели, при этом в державках устанавливают тензодатчики замера поперечной и боковой силы, а также замера момента, в ГТ устанавливают датчики замера скорости потока воды. Затем включают двигатель, создающий поток жидкости в трубе, устанавливают необходимую скорость потока воды и замеряют силы поперечную и боковую силы и момента.
Недостатком данного способа является необходимость использования жидкости в качестве рабочей среды для измерения параметров БПЛА, а также отсутствие возможности изменения положения БПЛА по вертикальной оси.
Известно устройство для определения аэродинамических характеристик модели ракеты авиационного базирования (RU 2564054 С1, 24.04.2014). Устройство содержит модель ракеты со съемной носовой частью, установленную на внутримодельных шестикомпонентных тензовесах с помощью конической посадки, соединенных с внутренней державкой, прикрепленной к модели носителя, установленной в аэродинамической трубе, оснащенной тензостанцией и пультом управления в препараторской. Технический результат заключается в повышении достоверности измерений.
Наиболее близким аналогом предлагаемого устройства, принятым в качестве прототипа, является устройство для определения аэродинамических нагрузок, действующих на оперение модели (RU 2596038 С2, 23.01.2015). Изобретение относится к экспериментальной аэродинамике. Устройство содержит модель объекта, установленную на хвостовой державке, закрепленной в стойке аэродинамической трубы, и измерительное весовое устройство, соединяющее державку с испытываемой моделью. Измерительное весовое устройство представляет собой тензовесы рулей и тензовесы крыльев, установленных в хвостовом и крыльевом отсеках модели соответственно. Измерительная поворотная консоль руля посажена на кронштейн, закрепленный в тензовесах руля, а измерительная поворотная консоль крыла посажена на кронштейн, закрепленный в тензовесах крыла. Технический результат заключается в возможности расширения диапазона исследований с высокой степенью достоверности при определении аэродинамических нагрузок, действующих на складные рули и крылья модели при различных вариациях их взаимного расположения.
Недостатком данного устройства является отсутствие возможности регулировать скорость воздушного потока в динамическом режиме. Кроме того, не предусмотрена возможность исследования влияния положения центра масс на характеристики аэромеханики БПЛА, а также исследования влияния нестационарного воздушного потока на характеристики аэродинамики, устойчивости и управляемости летательного аппарата.
Техническим результатом предлагаемого устройства является расширение диапазона скоростей и ускорений воздушного потока.
Техническим результатом предлагаемого способа является возможность точного регулирования скоростей и ускорений воздушного потока при экспериментальных исследованиях аэромеханики и динамики полета беспилотных летательных аппаратов.
Технический результат способа достигается тем, что экспериментально исследуют характеристики беспилотного летательного аппарата при заданном увеличении или снижении скорости полета, выполняя следующие операции:
- определяют скорость беспилотного летательного аппарата, подлежащую исследованию, путем интегрирования уравнений движения БПЛА при заданном законе управления;
- используют полученные при интегрировании величин скорости летательного аппарата в качестве программных установок для средств управления скоростью воздушного потока;
- воспроизводят скорости воздушного потока с помощью группы моторов 6-17;
- измеряют силы и моменты, действующие на летательный аппарат, с помощью шестикомпонентного динамометра 48;
- вычисляют аэродинамические коэффициенты подъемной силы и сопротивления;
- вычисляют уточненные величины аэродинамического сопротивления аппарата и скорости его движения;
- устанавливают летательный аппарат на угол тангажа в диапазоне от -45° до 45°, который согласно показаниям шестикомпонентного динамометра 48 обеспечивает создание подъемной силы, равной весу, с помощью автоматического управления сервомеханизмами 61-64.
Кроме того выполняют следующую дополнительную операцию:
- перемещают опорную плиту 59 в направлении оси X на расстояние до 0,5 м от исходного положения и повторяют вышеописанные измерительные операции.
Воспроизводят с помощью группы моторов 6-17 заданной зависимости величины скорости воздушного потока от времени.
Периодически изменяют угол тангажа с помощью автоматического управления сервомеханизмами 61-64;
- периодически изменяют положение аппарата по оси Z с помощью автоматического управления сервомеханизмами 61-64.
Технический результат для устройства достигается тем, что устройство для экспериментальных исследований аэромеханики и динамики полета беспилотных летательных аппаратов содержит средства создания воздушного потока, средства измерения сил и моментов, действующих на исследуемый аппарат, средства управления положением исследуемого аппарата, при этом средства создания воздушного потока выполнены в виде группы движителей, каждый из которых имеет индивидуальный быстродействующий привод, состоящий из пропеллера 18-29, бесколлекторного электрического мотора 6-17 с регулятором скорости оборотов мотора и датчиков скорости воздушного потока 30-41, создаваемого пропеллером, причем движители расположены, по меньшей мере, в три параллельных ряда, что обеспечивает возможность моделировать неравномерное распределение скорости и турбулентности воздушного потока, для измерения сил и моментов, действующих на исследуемый аппарат, внутри фюзеляжа исследуемого аппарата установлен шестикомпонентный динамометр, имеющий статически определимую конструкцию, состоящую из тензометрических балок, причем две параллельных балки 55 и 56, измеряющие силы, направленные вдоль вертикальной оси Z, жестко закреплены корневыми концами к опорной плите динамометра 59, которая соединена со шпангоутом фюзеляжа через четыре сервомеханизма 61-64, служащих для параллельного перемещения плоскости плиты 59 вдоль оси X и вдоль оси Y, а также для поворота плоскости плиты ОП относительно плоскости шпангоута на угол тангажа α, причем продольные оси балок 55 и 56 параллельны оси X, а другие концы этих балок жестко соединены с первым поперечным диском 57, с которым жестко соединены корневые концы двух параллельных балок 53 и 54, измеряющих силы, направленные вдоль боковой горизонтальной оси Y, причем продольные оси этих балок направлены противоположно направлению осей балок 55 и 56, другие концы балок 53 и 54 жестко соединены со вторым поперечным диском 58, к которому также жестко прикреплены корневые концы тензометрических балок 49-52, измеряющих силы, направленные вдоль оси X, причем продольные оси балок 49 и 50 наклонены к вертикальной оси на -45° и +45°, соответственно, продольная ось балки 51 является продолжением продольной оси балки 49, продольная ось балки 52 является продолжением продольной оси балки 50, противоположные концы балок 49-52 жестко закреплены на раме динамометра 60, имеющей форму квадратного кольца в плоскости ZY, причем в нижней части рамы динамометра имеется разъемное соединение с державкой 5, которая установлена на неподвижном основании 1.
С целью расширения диапазона скоростей воздушного потока и снижения уровня турбулентности, средства создания воздушного потока в виде группы тянущих пропеллеров 6-17 установлены на расстоянии 1-1,5 м от хвостовой части исследуемого летательного аппарата.
С целью расширения диапазона скоростей воздушного потока, между группой пропеллеров и исследуемым летательным аппаратом установлен конфузор 3, изменяющий ширину струи воздушного потока.
С целью расширения диапазона скоростей воздушного потока, между группой пропеллеров и исследуемым летательным аппаратом установлена сетка 4 для уменьшения размеров вихрей в потоке.
Технический результат как по способу, так и по устройству достигается только в пределах указанных выше соотношений, что показали экспериментальные исследования.
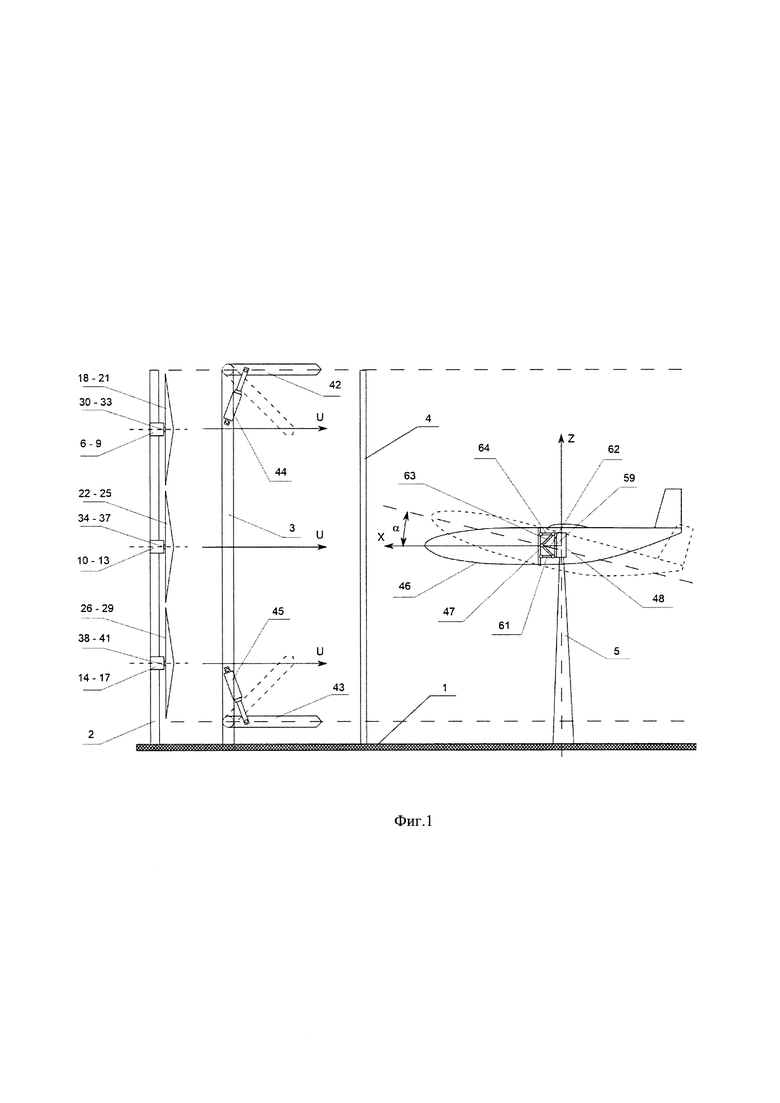
На фиг. 1. представлен общий вид устройства для экспериментальных исследований аэромеханики и динамики полета беспилотных летательных аппаратов.
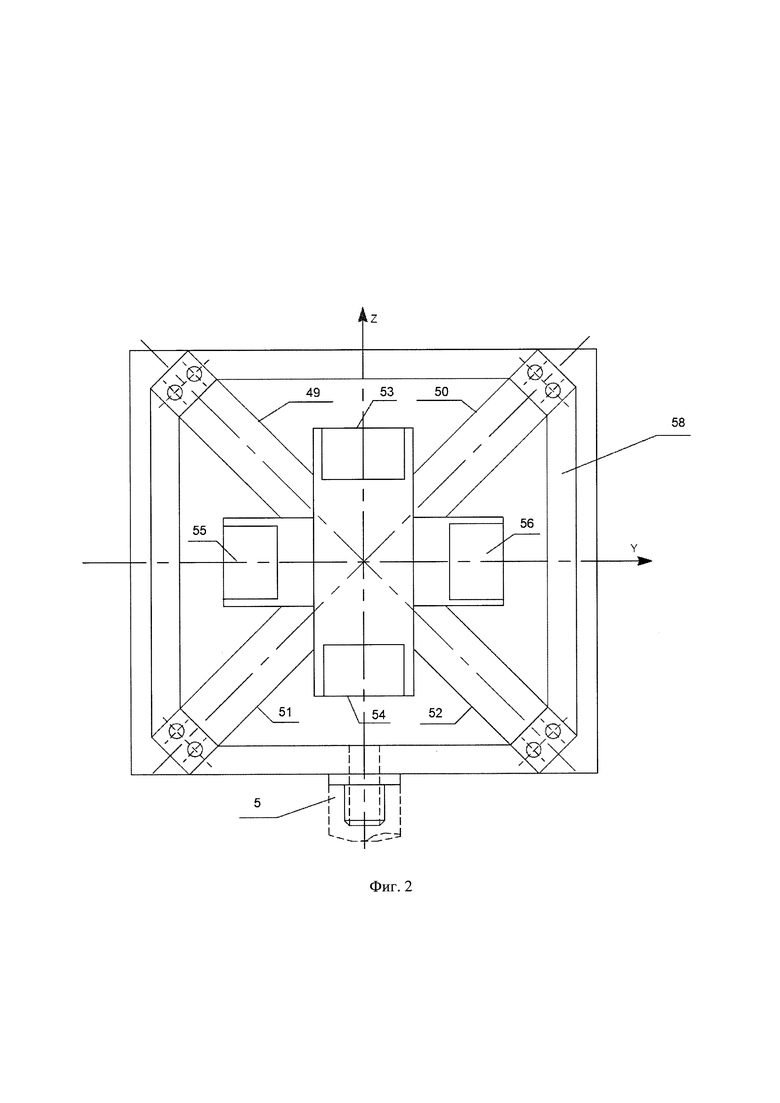
На фиг. 2. представлен вид сверху на шестикомпонентный динамометр.
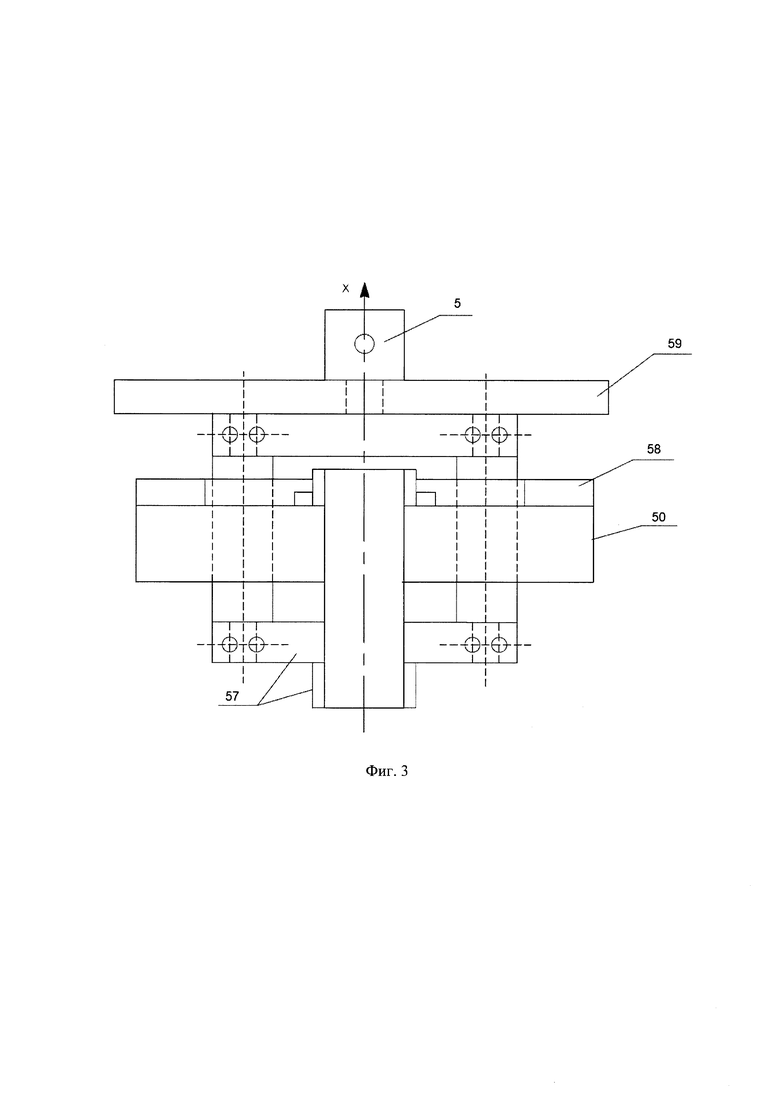
На фиг. 3. представлен вид сбоку на шестикомпонентный динамометр.
Устройство для экспериментальных исследований аэромеханики и динамики полета беспилотных летательных аппаратов содержит средства для создания воздушного потока и управления его скоростью, средства измерения сил и моментов, действующих на исследуемый аппарат, средства управления положением исследуемого аппарата. С целью исследования динамической реакции летательного аппарата на переходных режимах полета, средства создания воздушного потока выполнены в виде группы быстродействующих приводов Р1, Р2, …Pn, расположенных на раме моторов 2, которая закреплена на неподвижном основании стенда 1. Каждый из приводов состоит из бесколлекторного электрического мотора 6-17 с регулятором скорости оборотов и датчиков скорости воздушного потока 30-41, создаваемого закрепленными на валу моторов пропеллерами 18-29. Причем пропеллеры расположены, как минимум в три параллельных ряда (один ряд над другим), что обеспечивает возможность моделировать неравномерное распределение скорости и турбулентности воздушного потока. На некотором расстоянии от пропеллеров установлены конфузор для дополнительного регулирования скорости воздушного потока и сетка сотовой конструкции 4 для уменьшения размеров вихрей в потоке.
Конфузор выполнен в виде двух прямоугольных поворотных панелей 42, 43, шарнирно соединенных с рамой конфузора 3, которая закреплена на неподвижном основании стенда. Ширина каждой панели равна ширине струи воздушного потока, а длина каждой панели равна 0,75 высоты струи воздушного потока при открытых панелях конфузора. Верхняя панель закреплена на шарнире, который находится на верхней границе струи воздушного потока, а нижняя панель закреплена на шарнире, который находится на нижней границе струи воздушного потока. В начальном положении плоскости панелей параллельны продольной оси воздушного потока. Поворот панелей производится с помощью линейных приводов 44, 45.
Внутри фюзеляжа 46 исследуемого аппарата установлен шестикомпонентный динамометр 48, рама которого соединена с державкой 5, закрепленной на неподвижном основании стенда 1. Шестикомпонентный динамометр имеет опорную плиту 59, которая соединена со стенкой шпангоута 47 исследуемого аппарата с помощью линейных электрических сервомеханизмов 61-64. Современные линейные сервомеханизмы обеспечивают достаточно высокую скорость перемещения. Например, сервомеханизм типа FA-RA-22-XX фирмы Firgelli в полностью нагруженном состоянии обеспечивает перемещение со скоростью 114 мм/сек. Программируя перемещения сервомеханизмов Л1, Л2, Л3, Л4, можно наклонить продольную ось исследуемого аппарата на заданный угол тангажа α; можно также перемещать положение центра масс исследуемого аппарата относительно опорной плиты 59 динамометра.
На фиг. 2 и фиг. 3 представлен схематический чертеж шестикомпонентного динамометра, в котором для измерения сил и моментов используется восемь тензометрических балок. Две балки 55 и 56, измеряющие силы Z1 и Z2, направленные вдоль оси Z, закреплены корневыми частями к опорной плите динамометра 59. Продольные оси балок 55 и 56 параллельны оси X, а другие концы этих балок жестко соединены с первым поперечным диском 57, с которым жестко соединены корневые концы двух параллельных балок 53 и 54, измеряющих силы Y1 и Y2, направленные вдоль боковой горизонтальной оси Y, причем продольные оси этих балок направлены противоположно направлению осей балок 55 и 56. Другие концы балок 53 и 54 жестко соединены со вторым поперечным диском 58, к которому также жестко прикреплены корневые концы тензометрических балок 49-52, измеряющих силы X1, Х2, Х3, Х4, направленные вдоль оси X, причем продольные оси балок 49 и 50 наклонены к вертикальной оси на -45° и +45°, соответственно, продольная ось балки 51 является продолжением продольной оси балки 49, продольная ось балки 52 является продолжением продольной оси балки 50, противоположные корневым концы балок 49-52 жестко закреплены на раме динамометра 60, имеющей форму квадратного кольца в плоскости ZY, причем в нижней части рамы динамометра имеется разъемное соединение с державкой 5, которая установлена на неподвижном основании 1.
Конструкция этого динамометра дает возможность определить силы и моменты, действующие на БПЛА, используя следующие формулы:
X=0,25(X1+Х2+Х3+Х4);
Y=0,5(Y1+Y2);
Z=0,5(Z1+Z2);
Мх=(Z1-Z2)Dx;
My=(X1+X2-X3-X4)Dy;
Mz=(X1+X3-X2-X4)Dz.
где X1, X2, Х3, X4, Y1, Y2, Z1, Z2 это величины сил, которые были измерены с помощью соответствующих тензометрических балок; Dx, Dy, Dz - это плечи результирующих сил. Следовательно, можно точно определить величины Dx, Dy, Dz в процессе калибровки динамометра. Для этого нужно последовательно нагрузить динамометр заданным моментом Мх, My, Mz, произвести измерения соответствующих сил X1, Х2, Х3, Х4, Y1, Y2, Z1, Z2, а затем вычислить Dx, Dy, Dz, используя приведенные выше формулы.
Предлагаемое устройство содержит средства создания воздушного потока, которые выполнены в виде группы моторов с пропеллерами (Р1, Р2, …Pn), В качестве прототипа стенда рассмотрим стенд, который будет иметь 12 моторов 6-17; диаметр каждого пропеллера 18-29 равен D=0,5 м. Пропеллеры расположены в три параллельных ряда, (один ряд над другим), по четыре пропеллера в каждом ряду. Такое расположение пропеллеров обеспечивает возможность моделировать неравномерное распределение скорости и турбулентности воздушного потока при исследовании малых БПЛА, вес которых не превышает 25 кг, а предельные размеры равны: 1,5 м по оси X (длина фюзеляжа); 1,8 м по оси Y (размах крыла); 0,3 м по оси Z (от шасси до плоскости подъемных винтов).
Расстояние от плоскости вращения пропеллеров до носовой части фюзеляжа БПЛА должно быть равно 0,6 м - 0,7 м. Размеры струи воздушного потока в рабочей части: ширина 2 м, минимальный размер по высоте 0,75 м. С помощью моторов типа Hacker А80-8 можно достичь величины скорости воздушного потока  Для испытаний большинства современных малых БПЛА, взлетный вес которых не превышает 25 кг, достаточно на стенде иметь величину скорости воздушного потока
Для испытаний большинства современных малых БПЛА, взлетный вес которых не превышает 25 кг, достаточно на стенде иметь величину скорости воздушного потока  Для этого можно использовать менее мощные и обладающие быстродействующим управлением моторы фирмы Scorpion Power типа SII-2215-1400kV.
Для этого можно использовать менее мощные и обладающие быстродействующим управлением моторы фирмы Scorpion Power типа SII-2215-1400kV.
По сравнению с известными способами экспериментальных исследований аэромеханики и динамики полета беспилотных летательных аппаратов и устройствами для осуществления этих способов предлагаемое изобретение обладает следующими преимуществами.
1. Устройство позволяет регулировать скорость воздушного потока в динамическом режиме, моделируя ускорение и торможение летательного аппарата.
2. При измерении сил и моментов, действующих на исследуемый летательный аппарат, отсутствует взаимовлияние каналов. Силы и моменты определятся по простым формулам.
3. Обеспечивается возможность проведения следующих новых условий исследований, которые было невозможно выполнить на известных устройствах, применяя известные ранее способы:
- экспериментальное исследование влияния нестационарного воздушного потока и нестационарного движения летательного аппарата на характеристики аэромеханики, устойчивость и управляемость летательного аппарата;
- экспериментальное исследование влияния положения центра масс на характеристики аэромеханики летательного аппарата;
4. Предлагаемое устройство может быть использовано для экспериментальных исследований беспилотного летательного аппарата любой аэродинамической схемы, включая многороторные вертолеты и конвертопланы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2824222C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2805891C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2799426C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| АТМОСФЕРНЫЙ ДИСКОЛЁТ | 2018 |
|
RU2674534C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| СПОСОБ ИСПЫТАНИЙ ПУЛЬСИРУЮЩЕГО ДЕТОНАЦИОННОГО ДВИГАТЕЛЯ И АЭРОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2381472C1 |
Изобретение относится к области авиационной испытательной техники, в частности к методам и средствам исследования аэромеханики и динамики полета беспилотных летательных аппаратов. При реализации способа экспериментально исследуют характеристики беспилотного летательного аппарата при заданном увеличении или снижении скорости полета, выполняя следующие операции: определяют скорость беспилотного летательного аппарата, подлежащую исследованию, путем интегрирования уравнений движения БПЛА при заданном законе управления; используют полученные при интегрировании величин скорости летательного аппарата в качестве программных установок для средств управления скоростью воздушного потока; воспроизводят скорости воздушного потока с помощью группы моторов 6-17; измеряют силы и моменты, действующие на летательный аппарат, с помощью шестикомпонентного динамометра 48; вычисляют аэродинамические коэффициенты подъемной силы и сопротивления; вычисляют уточненные величины аэродинамического сопротивления аппарата и скорости его движения. При этом устанавливают летательный аппарат на угол тангажа в диапазоне от -45° до 45°, который согласно показаниям шестикомпонентного динамометра 48 обеспечивает создание подъемной силы, равной весу, с помощью автоматического управления сервомеханизмами 61-64. Устройство содержит средства создания воздушного потока, средства измерения сил и моментов, действующих на исследуемый аппарат, средства управления положением исследуемого аппарата, при этом средства создания воздушного потока выполнены в виде группы движителей, каждый из которых имеет индивидуальный быстродействующий привод, состоящий из пропеллера, бесколлекторного электрического мотора с регулятором скорости оборотов мотора и датчиков скорости воздушного потока, создаваемого пропеллером. Причем движители расположены по меньшей мере в три параллельных ряда, что обеспечивает возможность моделировать неравномерное распределение скорости и турбулентности воздушного потока. Для измерения сил и моментов, действующих на исследуемый аппарат, внутри фюзеляжа исследуемого аппарата установлен шестикомпонентный динамометр, имеющий статически определимую конструкцию, состоящую из тензометрических балок. При этом две параллельные балки, измеряющие силы, направленные вдоль вертикальной оси Z, жестко закреплены корневыми концами к опорной плите динамометра, которая соединена со шпангоутом фюзеляжа через четыре сервомеханизма, служащих для параллельного перемещения плоскости плиты вдоль оси X и вдоль оси Y, а также для поворота плоскости плиты ОП относительно плоскости шпангоута на угол тангажа. Причем в нижней части рамы динамометра имеется разъемное соединение с державкой, которая установлена на неподвижном основании. Техническим результатом предлагаемого устройства является расширение диапазона скоростей и ускорений воздушного потока, а также возможность точного регулирования скоростей и ускорений воздушного потока при экспериментальных исследованиях аэромеханики и динамики полета беспилотных летательных аппаратов. 2 н. и 6 з.п. ф-лы, 3 ил.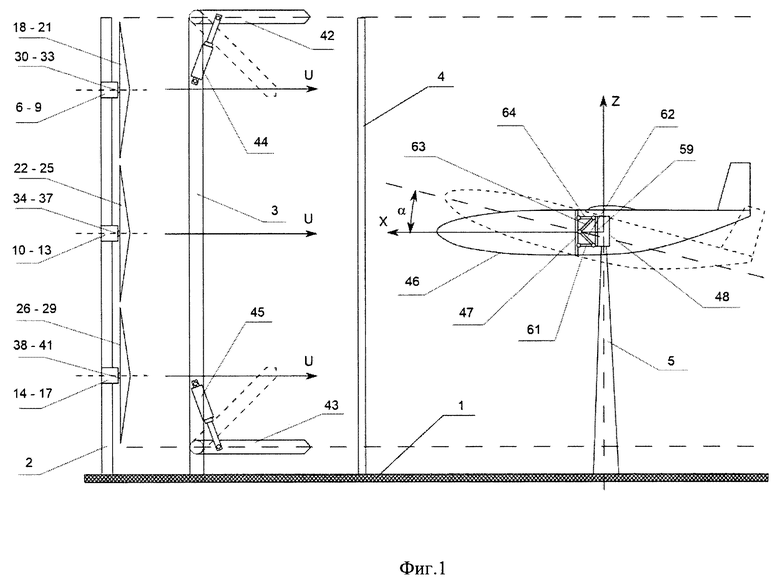
1. Способ экспериментального исследования характеристик беспилотного летательного аппарата при заданном увеличении или снижении скорости полета, характеризующийся тем, что выполняют следующие операции:
- определяют скорость беспилотного летательного аппарата, подлежащую исследованию, путем интегрирования уравнений движения БПЛА при заданном законе управления;
- используют полученные при интегрировании величин скорости летательного аппарата в качестве программных установок для средств управления скоростью воздушного потока;
- воспроизводят скорости воздушного потока с помощью группы моторов 6-17;
- измеряют силы и моменты, действующие на летательный аппарат, с помощью шестикомпонентного динамометра 48;
- вычисляют аэродинамические коэффициенты подъемной силы и сопротивления;
- вычисляют уточненные величины аэродинамического сопротивления аппарата и скорости его движения;
- устанавливают летательный аппарат на угол тангажа в диапазоне от -45° до 45°, который согласно показаниям шестикомпонентного динамометра 48 обеспечивает создание подъемной силы, равной весу, с помощью автоматического управления сервомеханизмами 61-64.
2. Способ по п. 1, характеризующийся тем, что выполняют следующую дополнительную операцию:
- перемещают опорную плиту 59 в направлении оси X на расстояние до 0,5 м от исходного положения и повторяют вышеописанные измерительные операции.
3. Способ по п. 1, характеризующийся тем, что выполняют следующую дополнительную операцию:
- воспроизводят с помощью группы моторов 6-17 заданной зависимости величины скорости воздушного потока от времени.
4. Способ по п. 1, характеризующийся тем, что выполняют следующие дополнительные операции:
- периодически изменяют угол тангажа с помощью автоматического управления сервомеханизмами 61-64;
- периодически изменяют положение аппарата по оси Z с помощью автоматического управления сервомеханизмами 61-64.
5. Устройство для экспериментальных исследований аэромеханики и динамики полета беспилотных летательных аппаратов, характеризующееся тем, что содержит средства создания воздушного потока, средства измерения сил и моментов, действующих на исследуемый аппарат, средства управления положением исследуемого аппарата, при этом средства создания воздушного потока выполнены в виде группы движителей, каждый из которых имеет индивидуальный быстродействующий привод, состоящий из пропеллера 18-29, бесколлекторного электрического мотора 6-17 с регулятором скорости оборотов мотора и датчиков скорости воздушного потока 30-41, создаваемого пропеллером, причем движители расположены по меньшей мере в три параллельных ряда, что обеспечивает возможность моделировать неравномерное распределение скорости и турбулентности воздушного потока, для измерения сил и моментов, действующих на исследуемый аппарат, внутри фюзеляжа исследуемого аппарата установлен шестикомпонентный динамометр, имеющий статически определимую конструкцию, состоящую из тензометрических балок, причем две параллельные балки 55 и 56, измеряющие силы, направленные вдоль вертикальной оси Z, жестко закреплены корневыми концами к опорной плите динамометра 59, которая соединена со шпангоутом фюзеляжа через четыре сервомеханизма 61-64, служащих для параллельного перемещения плоскости плиты 59 вдоль оси X и вдоль оси Y, а также для поворота плоскости плиты ОП относительно плоскости шпангоута на угол тангажа α, причем продольные оси балок 55 и 56 параллельны оси X, а другие концы этих балок жестко соединены с первым поперечным диском 57, с которым жестко соединены корневые концы двух параллельных балок 53 и 54, измеряющих силы, направленные вдоль боковой горизонтальной оси Y, причем продольные оси этих балок направлены противоположно направлению осей балок 55 и 56, другие концы балок 53 и 54 жестко соединены со вторым поперечным диском 58, к которому также жестко прикреплены корневые концы тензометрических балок 49-52, измеряющих силы, направленные вдоль оси X, причем продольные оси балок 49 и 50 наклонены к вертикальной оси на -45° и +45° соответственно, продольная ось балки 51 является продолжением продольной оси балки 49, продольная ось балки 52 является продолжением продольной оси балки 50, противоположные концы балок 49-52 жестко закреплены на раме динамометра 60, имеющей форму квадратного кольца в плоскости ZY, причем в нижней части рамы динамометра имеется разъемное соединение с державкой 5, которая установлена на неподвижном основании 1.
6. Устройство по п. 5, характеризующееся тем, что средства создания воздушного потока в виде группы тянущих пропеллеров 6-17 установлены на расстоянии 1-1,5 м от хвостовой части исследуемого летательного аппарата.
7. Устройство по п. 5, характеризующееся тем, что между группой пропеллеров и исследуемым летательным аппаратом установлен конфузор 3, изменяющий ширину струи воздушного потока.
8. Устройство по п. 5, характеризующееся тем, что между группой пропеллеров и исследуемым летательным аппаратом установлена сетка 4 для уменьшения размеров вихрей в потоке.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2561829C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2460982C1 |
| СКРЕПЕРОСТРУГОВАЯ УСТАНОВКА | 0 |
|
SU179254A1 |
| US 7997130 B1, 16.08.2011 | |||
| Брусов B.C., Петручик В.П | |||
| Проблемы исследования аэромеханики полета беспилотных летательных аппаратов сверхмалой размерности // Вестник МАИ, Т | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |

