Изобретение относится к области безопасности полетов и, в частности, к способам определения безопасных траекторий движения летательных аппаратов (ЛА) над местностью со сложным рельефом и может использоваться на ЛА всех типов.
Известны способы предупреждения столкновения ЛА с рельефом местности, в которых определяют местоположение ЛА с помощью навигационной системы, производят определение параметров текущего динамического состояния, экстраполируют упомянутые параметры текущего динамического состояния на заданный временной интервал, вычисляют прогнозируемую траекторию, сопоставляют ее с рельефом местности и предупреждают об опасности столкновения [1-5].
Известны способы предупреждения столкновения, обеспечивающие выход из опасной ситуации путем оценки возможности вертикального маневра [6], а при отрицательном результате такой оценки - путем определения направления возможного бокового разворота [7].
Недостаток всех упомянутых выше способов обусловлен недостаточной надежностью предотвращения столкновений ЛА с рельефом. Этот недостаток всегда присутствует в связи с тем, что определение близости опасного рельефа производится строго по курсу ЛА в диапазоне разброса местоположения ЛА. Однако могут возникнуть ситуации, когда, при обнаружении опасного рельефа по курсу и невозможности обойти опасный рельеф путем набора высоты, ЛА вынужден будет произвести разворот на обратный курс. При этом необходимо обеспечить безопасное для разворота в ту или другую сторону пространство. Как известно [8-10], допустимый радиус разворота является переменной величиной, зависящей от динамических параметров ЛА в данный момент.
Однако если опасный рельеф имеет, например, вид ущелья, то при оценке бокового разворота в любом направлении [7] может выдаваться аварийный сигнал. Следовательно, в случае отрицательной оценки возможности вертикального маневра, боковой разворот также окажется невозможным и авария неизбежна.
Таким образом, упомянутый выше недостаток присущ всем известным способам предупреждения столкновения ЛА с рельефом местности.
В связи с этим за прототип заявляемого изобретения выбирается способ по патенту [5], в котором осуществляются наиболее общие и характерные признаки системы предупреждения столкновения ЛА с рельефом местности, а именно следующая последовательность действий: определение местоположения ЛА с помощью навигационной системы, определение параметров текущего динамического состояния ЛА, экстраполяция параметров на заданный временной интервал, вычисление прогнозируемой траектории, сопоставление ее с рельефом местности, предупреждение об опасности столкновения.
Известное устройство-прототип, реализующее данный способ, содержит навигационную систему, обнаружитель препятствий, устройство сигнализации, видеогенератор и дисплей на его выходе, при этом обнаружитель препятствий включает вычислитель параметров текущего динамического состояния, определитель координат, вычислитель прогнозируемой траектории и компаратор, выход навигационной системы подключен к входам вычислителя параметров текущего динамического состояния и определителя координат, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории, третий вход которого соединен с базой аэронавигационной информации, первый и второй входы компаратора соединены соответственно с блоком управления и базой данных рельефа, первый и второй выходы компаратора соответственно соединены с входом устройства сигнализации и первым входом видеогенератора, второй и третий входы которого соответственно соединены с базой аэронавигационной информации и выходом определителя координат, причем выход вычислителя прогнозируемой траектории соединен с третьим входом компаратора.
Задачей заявляемого изобретения является повышение безопасности полетов путем определения опасного рельефа с учетом возможности разворота ЛА на обратный курс (вправо или влево от прогнозируемой траектории).
Задача решается следующим образом.
Суть заявляемого способа предупреждения столкновения летательного аппарата с рельефом местности состоит в том, что определяют местоположение летательного аппарата с помощью навигационной системы, производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию, определяют опасный рельеф и предупреждают о наличии опасности, при этом непрерывно перед определением опасного рельефа местности вычисляют на основе параметров текущего динамического состояния значение минимально допустимых радиусов разворота (вправо и влево), затем прогнозируют значение упомянутых радиусов разворота на время определения опасного рельефа, а далее путем сканирования пространства прогнозируемой траекторией формируют безопасный коридор, границы которого определяют исходя из возможности разворота летательного аппарата на обратный курс в соответствии с прогнозируемым значением минимально допустимых радиусов разворота, и определяют опасный рельеф на основании сопоставления упомянутого безопасного коридора с рельефом местности.
Предлагается границы безопасного коридора определять путем сканирования пространства линией прогнозируемой траектории влево и вправо от упомянутой траектории, при этом ширину безопасного коридора определяют формулой:

где
L - ширина безопасного коридора;
Rпр.п. - прогнозируемый минимально допустимый радиус правого разворота;
Rпр.л. - прогнозируемый минимально допустимый радиус левого разворота;
l1 - максимальная ошибка определения местоположения летательного аппарата;
l2 - минимально безопасное боковое расстояние летательного аппарата от рельефа местности.
Предлагается устройство, функционирующее на основе заявляемого способа. Это устройство предупреждения столкновения летательного аппарата с рельефом местности содержит навигационную систему, обнаружитель препятствий, устройство сигнализации, видеогенератор и дисплей на его выходе, при этом обнаружитель препятствий включает вычислитель параметров текущего динамического состояния, определитель координат, вычислитель прогнозируемой траектории и компаратор, выход навигационной системы подключен к входам вычислителя параметров текущего динамического состояния и определителя координат, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории, третий вход которого соединен с базой аэронавигационной информации, первый и второй входы компаратора соединены соответственно с блоком управления и базой данных рельефа, первый и второй выходы компаратора соответственно соединены с входом устройства сигнализации и первым входом видеогенератора, второй и третий входы которого соответственно соединены с базой аэронавигационной информации и выходом определителя координат, при этом введены вычислитель минимального допустимых радиусов разворота, вычислитель прогнозируемых минимально допустимых радиусов разворота, формирователь безопасного коридора и сканирующий узел компаратора, при этом вход вычислителя минимально допустимых радиусов разворота соединен с выходом вычислителя параметров текущего динамического состояния, а его выход соединен с первым входом формирователя безопасного коридора, второй вход которого соединен с выходом вычислителя прогнозируемых минимально допустимых радиусов разворота, а его третий вход соединен с выходом вычислителя прогнозируемой траектории, выполненного с дополнительным выходом, который соединен с входом вычислителя прогнозируемых минимально допустимых радиусов разворота, причем выход формирователя безопасного коридора соединен с третьим входом компаратора и входом сканирующего узла компаратора, выход которого соединен с четвертым входом компаратора, а четвертый вход видеогенератора соединен с выходом вычислителя прогнозируемой траектории.
Предлагается вариант устройства с введением узла памяти пройденной траектории, вход которого соединен с выходом определителя координат, а выход соединен с пятым входом видеогенератора.
Работа способа поясняется с помощью фиг.1-4. Работа устройства поясняется с помощью фиг.5.
Фиг.1 - алгоритм последовательности действий для реализации заявляемого способа.
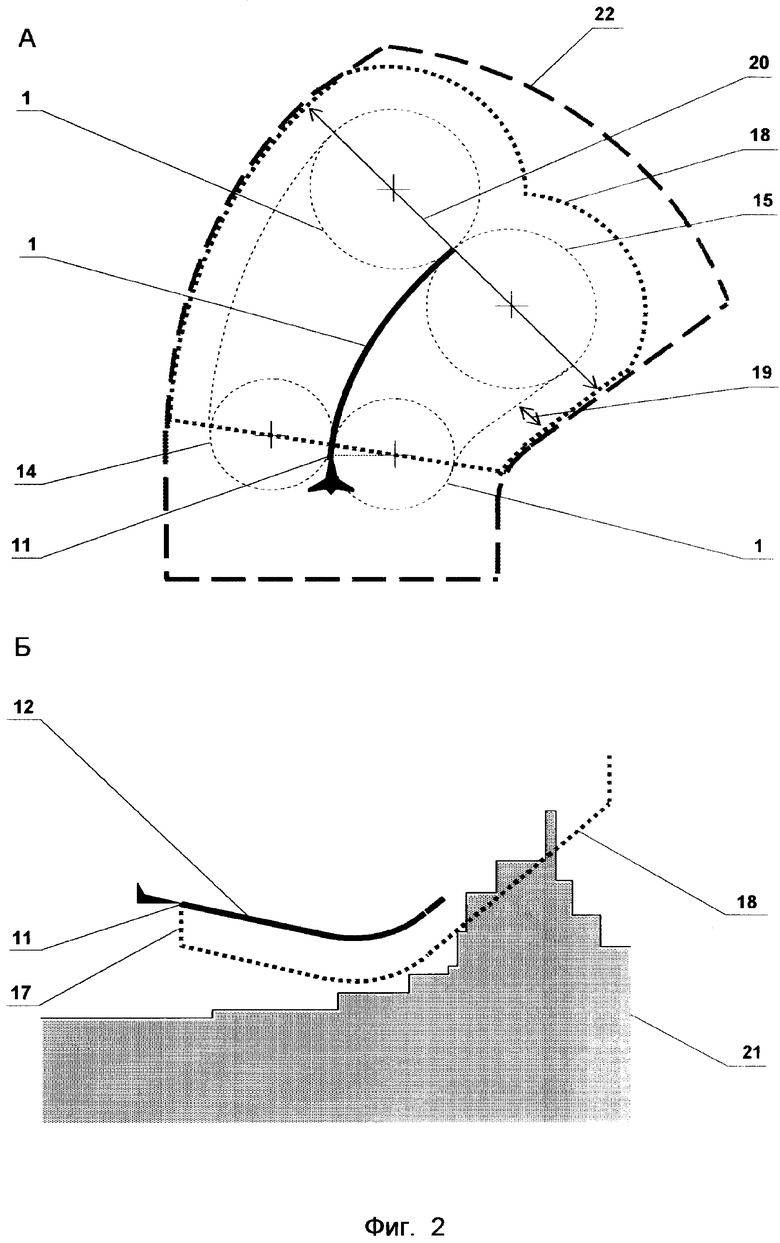
Фиг.2 - плановая (А) и профильная (Б) проекции прогнозируемой траектории и безопасного пространственного коридора.
Фиг.3 - схема построения плановой проекции прогнозируемой траектории и безопасного пространственного коридора.
Фиг.4 - схема построения профильной проекции прогнозируемой траектории и безопасного пространственного коридора.
Фиг.5 - блок-схема заявляемого устройства.
Заявляемый способ реализуется следующей последовательностью действий (см. фиг.1).
Аналогично способу-прототипу [5], с помощью навигационной системы производят определение местоположения ЛА 1, определение параметров текущего динамического состояния ЛА (путевой скорости - Wп, вертикальной скорости - Wу, путевого угла - ПУ, скорости разворота - ωу и др.) 2, по которым производят экстраполяцию местоположения ЛА на заданный временной интервал (Тп) и вычисление прогнозируемой траектории 3. Однако далее, в отличие от прототипа, непрерывно перед определением опасного рельефа местности производят вычисление минимально допустимых радиусов разворота (как вправо, так и влево от прогнозируемой траектории) на основе параметров динамического состояния 4, затем - вычисление прогнозируемых (на время определения опасного рельефа) радиусов разворота 5 на основе вычисленных прогнозируемых динамических параметров ЛА, далее производят определение границы безопасного пространственного коридора (ВПК) 6, внутри которого должна быть расположена прогнозируемая траектория.
Границы БПК определяются исходя из возможности разворота ЛА на обратный курс в соответствии с прогнозируемыми минимально допустимыми радиусами разворота. При этом сопоставление ВПК с рельефом местности 7 (в пределах сформированной выборки из базы данных о рельефе 8) производят путем сканирования пространства в пределах БПК. В случае совпадения части рельефа местности с БПК 9 происходит формирование уведомления о наличии опасности 10.
БПК на фиг.2А, Б представляет собой пространственную область, связанную непосредственно с текущим местоположением ЛА 11 и определяемую (по форме и ориентации в пространстве) прогнозируемой траекторией 12, минимально допустимыми радиусами кругов разворота вправо 13 и влево 14, и прогнозируемыми (на заданный временной интервал) минимально допустимыми радиусами кругов разворота вправо 15 и влево 16. Кроме того, БПК формируется исходя из максимальной ошибки определения местоположения летательного аппарата l1 и минимально безопасного бокового расстояния летательного аппарата от рельефа местности l2, а также определяется параметрами движения (Wп, Wу, ПУ, ωу), минимально допустимой высотой Нмд, дополнительным запасом высоты ΔН, определяемым из условия минимизации вероятности псевдоложных срабатываний уведомляющей сигнализации. Величина Нмд, как известно [6], зависит от этапа выполняемого полета (крейсерский полет, полет в зоне аэродрома, заход на посадку) и режима полета (горизонтальный полет, снижение, набор высоты). Сумма (Нмд+ΔН) является расстоянием 17, на которое нижняя часть границы БПК 18 отстоит от прогнозируемой траектории, а сумма величин (l1+l2) 19 является минимальным расстоянием от границы БПК до кругов разворота как с минимально допустимыми радиусами, так и с прогнозируемыми минимально допустимыми радиусами.
Пересчет конфигурации границ БПК 18 осуществляется с темпом, необходимым для обновления информации, и, таким образом, БПК с шириной 20 формируется адаптированным к текущему динамическому состоянию ЛА, к этапу и режиму выполняемого полета. Такой прием существенно облегчает экипажу задачу принятия решения в сложившейся ситуации, так как позволяет оценить степень опасности сближения с рельефом до возникновения опасной ситуации и не требует для этого профилактического просмотра отображения рельефа, т.е. снижает психологическую нагрузку экипажа. Таким образом, оказывается возможным вообще избежать создания опасной ситуации на борту путем своевременного маневрирования, выполненного на основании сформированной сигнализации о потенциально опасном рельефе.
Синтезирование профильной проекции рельефа (21 на фиг.2Б и фиг.4) осуществляется путем выбора максимальных высот элементов рельефа, представленных на плановой проекции, в пределах границ области информационного сканирования элементов рельефа (22 на фиг.2А и фиг.3). Для формирования профильной проекции сканирование производят в пределах строк (23 на фиг.3) области информационного сканирования.
Конфигурация области информационного сканирования с границами 22 для формирования профильной проекции рельефа 21, приведенной соответственно на фиг.2Б и фиг.4, выбирается из расчета обеспечения отображения на профильной проекции контура рельефа, расположенного в пределах пространства БПК, продленного в направлении прогнозируемого полета ЛА и в направлении, обратном текущему путевому углу 24 (см. фиг.3).
Максимально удаленный от ЛА рельеф, отображаемый на профильной проекции, определяется вертикальным масштабом дальности плановой проекции, что видно из сравнения расположения масштабных сеток дальности 25 на плановой и профильной проекциях (см. фиг.3 и фиг.4). Превышение опасного рельефа над ЛА позволяет оценить масштабная сетка 26 (см. фиг.4).
Как показано на фиг.3 и фиг.4, поверхность, ограничивающая формируемый БПК, обращена к рельефу, расположенному в направлении прогнозируемого полета, совмещена в исходной точке с ЛА, расширяется (или сужается) в направлении полета и имеет удаление переднего фронта от ЛА, соответствующее положению максимально удаленного от ЛА круга разворота (на фиг.2Б и фиг.4 максимально удален от ЛА левый круг) с прогнозируемой путевой скоростью Wпп. Расширение (сужение) ВПК в направлении полета при отсутствии маневрирования ЛА по курсу производится симметрично в соответствии с прогнозируемым увеличением (уменьшением) текущей путевой скорости Wп. При наличии ненулевой скорости разворота ωу прогнозируется искривление БПК в направлении выполняемого разворота.
Граничную поверхность БПК (18 на фиг.2 и фиг.3) формируют пятью последовательными поверхностями (17, 27-30 на фиг.4). Первые четыре последовательные поверхности составляют часть граничной поверхности, сигнализирующую об опасности снижения ЛА до высоты, превышающей минимально допустимую высоту полета Нмд на дополнительный запас высоты ΔН. Эта часть граничной поверхности расположена ниже прогнозируемой траектории 12 на величину Нмд+ΔН, где величина дополнительного смещения ΔН>0 и определяется из условия минимизации вероятности формирования псевдоложной сигнализации. Пятая грань 30 граничной поверхности 18 расположена вертикально вверх и составляет часть граничной поверхности, предупреждающую о рельефе с опасным превышением в направлении полета. При этом под рельефом с опасным превышением понимается рельеф, от которого невозможно уйти на минимально допустимой высоте над ним, выполняя разворот с набором высоты при соблюдении требований по допустимым вертикальной и боковой перегрузке. Первая грань 17 вертикальна, ее ширина определяется точностью оценивания координат ЛА (2l1), безопасным расстоянием от рельефа (2l2), текущим значением минимально допустимых радиусов правого (2Rпр.п.) и левого (2Rпр.л.) разворота, а высота равна Нмд+ΔН, т.е., являясь функцией Нмд, соответствует тому этапу и режиму полета, к которым адаптируется БПК. Длины горизонтальных проекций второй 27 и третьей 28 поверхностей (L2 и L3 соответственно) определяются временем, необходимым для выполнения вертикального маневра ЛА при прогнозируемом уходе от опасного рельефа (с учетом допустимой вертикальной перегрузки), определяемом прогнозируемым значением путевой скорости Wпп. Наклон второй грани 27 относительно горизонта равен траекторному углу Θ 31, тангенс которого равен отношению текущих значений вертикальной (Wу) и путевой (Wп) скоростей. Третья поверхность 28 является конической или (при отсутствии прогноза бокового маневрирования) цилиндрической и длина ее горизонтальной проекции L3 определяется условием допустимой вертикальной перегрузки при прогнозируемом полете ЛА по лежащей в вертикальной плоскости дуге окружности 32. Четвертая поверхность 29 с длиной горизонтальной проекции L4 возвышается под допустимым траекторным углом набора высоты, равным Θдоп 33, до достижения контролируемого с помощью БПК расстояния от ЛА, определяемого прогнозируемым временем полета Тп со скоростью, изменяющейся от текущего значения Wп до прогнозируемого Wпп, а также определяемого положением наиболее удаленного круга разворота с прогнозируемыми минимально допустимыми радиусами (Rпр.п. и Rпр.л.), величинами l1 и l2 и ограничиваемого вертикальной пятой поверхностью 30. Если при выполнении полета элементы рельефа, определяемые сформированной выборкой из БДР, по результатам выполняемых расчетов оказываются расположенными внутри БПК (см. фиг.2), формируется уведомляющая сигнализация.
Расчет минимально допустимых радиусов разворота ЛА, необходимых для формирования БПК, производится в соответствии с уравнениями движения, сложность которых может существенно отличаться, в зависимости от фазы полета. В общем случае (без учета орбитального движения Земли вокруг Солнца, суточного движения Земли и выгорания топлива) минимально допустимые радиусы определяются численным методом путем решения системы уравнений движения ЛА, приведенных ниже [8].
Уравнение сил в траекторией системе координат:

где
m - масса ЛА;
 - вектор скорости ЛА в земной СК;
- вектор скорости ЛА в земной СК;
t - время;
Vкх - проекция земной скорости на ось Х траекторией СК;
Θ - угол наклона траектории;
Ψ - путевой угол;
символ  обозначает представление i-ого вектора (тяги ЛА
обозначает представление i-ого вектора (тяги ЛА  , аэродинамической силы
, аэродинамической силы  , силы тяжести
, силы тяжести  , результирующей силы реакции шасси
, результирующей силы реакции шасси  ) в i-ой системе координат (СК) (св - связанная СК, т - траекторная СК, з - земная СК, ск - скоростная СК);
) в i-ой системе координат (СК) (св - связанная СК, т - траекторная СК, з - земная СК, ск - скоростная СК);
символ  обозначает переходную матрицу коэффициентов из одной СК в другую (в данном случае из связанной в земную).
обозначает переходную матрицу коэффициентов из одной СК в другую (в данном случае из связанной в земную).
Уравнение момента количества движения относительно центра масс самолета:

где
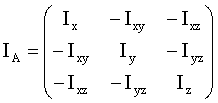 - тензор инерции (симметричная матрица из моментов инерции ЛА относительно осей связанной системы координат, в которой для самолетов, имеющих вертикальную плоскость симметрии, Ixz=Iyz=0);
- тензор инерции (симметричная матрица из моментов инерции ЛА относительно осей связанной системы координат, в которой для самолетов, имеющих вертикальную плоскость симметрии, Ixz=Iyz=0);
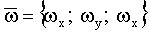 - вектор угловой скорости вращения самолета, а матрица
- вектор угловой скорости вращения самолета, а матрица  получается из транспонированием;
получается из транспонированием;
 - момент тяги ЛА;
- момент тяги ЛА;
 - аэродинамический момент;
- аэродинамический момент;
 - плечо результирующей силы реакции шасси;
- плечо результирующей силы реакции шасси;
 - плечо силы тяжести.
- плечо силы тяжести.
Уравнения кинематических связей линейных скоростей:

где
xg, yg, zg - координаты ЛА в земной СК;
L и Н - дальность и высота полета.
Уравнения кинематических связей угловых скоростей:

где
ωх1, ωу1, ωz1 - проекции угловой скорости вращения ЛА на оси связанной системы координат;
γ - угол крена;
ψ - угол рысканья;
ϑ - угол тангажа.
Общие допущения (симметричность тяги двигателя, неподвижность атмосферы) и различные допущения, которые возможны в траекторных задачах на большинстве участков выполняемого полета (координированный полет в вертикальной плоскости, горизонтальный полет по прямой, горизонтальный установившийся полет, прямолинейный набор высоты или снижение, набор высоты или снижение с постоянной скоростью, предпосадочное снижение по глиссаде, горизонтальный полет со скольжением без крена, горизонтальный полет с креном без скольжения) позволяют свести систему (2-5) в каждом из перечисленных случаев к существенно более простому виду [9].
Использование упрощенных уравнений для определения минимально допустимых радиусов разворота и расчета прогнозируемой траектории позволяет при необходимости снизить вычислительные затраты и повысить быстродействие и надежность производимых вычислений.
Так уравнения установившегося криволинейного полета в связанной системе координат, если считать угловые скорости малыми и пренебречь их произведениями, можно записать (пренебрегая кривизной земной поверхности) в виде:




где
β - угол скольжения;
δн - угол отклонения руля направления;
δэ - угол отклонения элеронов;
 - безразмерные проекции угловой скорости ЛА на оси связанной СК;
- безразмерные проекции угловой скорости ЛА на оси связанной СК;
 - частная производная коэффициента аэродинамического момента крена, обусловленная аэродинамическим параметром (в данном случае скольжением);
- частная производная коэффициента аэродинамического момента крена, обусловленная аэродинамическим параметром (в данном случае скольжением);
 - частная производная коэффициента аэродинамического момента рысканья, обусловленная аэродинамическим параметром (в данном случае скольжением);
- частная производная коэффициента аэродинамического момента рысканья, обусловленная аэродинамическим параметром (в данном случае скольжением);
 - частная производная коэффициента аэродинамической боковой силы, обусловленной аэродинамическим параметром (в данном случае скольжением);
- частная производная коэффициента аэродинамической боковой силы, обусловленной аэродинамическим параметром (в данном случае скольжением);
су - коэффициент аэродинамической нормальной силы;
ρ - плотность воздуха;
S - площадь эквивалентного крыла;
V - скорость набегающего потока;
α - угол атаки;
l - размах крыла.
Для небольших углов тангажа выражения (5) приобретают вид:
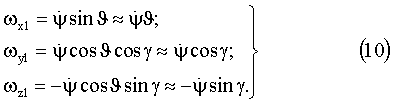
При выполнении в горизонтальной плоскости правильного виража (когда угол скольжения равен нулю) выражения (10) примут вид:
где
bа - средняя аэродинамическая хорда крыла.
Выражения (11) определяют составляющие угловой скорости по осям связанной с ЛА системы координат; при помощи этих выражений можно найти полную угловую скорость ЛА при правильном вираже. Переходя от безразмерных угловых скоростей к размерным, возводя составляющие в квадрат и складывая эти квадраты, получим квадрат полной угловой скорости и затем - полную угловую скорость. Таким образом, найдем:

где g - ускорение свободного падения.
Полагая силы, действующие на ЛА, не зависящими от положения рулей  , получаем еще более простое выражение:
, получаем еще более простое выражение:
Учитывая, что V/R=ω, получаем, с учетом перечисленных допущений, простейшее выражение для расчета радиуса правильного виража R, выполняемого в горизонтальной плоскости:
В общем случае радиусы кривизны траекторий правого и левого разворотов различаются. Например, при учете несимметричности ЛА, имеющей место при отказе одного из двигателей. При выполнении разворота в условиях ветра с постоянным креном траектория правого разворота и левого разворота не являются окружностями, что еще более усложняет расчет границ БПК.
Если в рассмотренном случае в выражении (14) использовать максимально допустимый (из соображений допустимой боковой перегрузки) крен γдоп., то с использованием текущего значения скорости V можно рассчитать текущий минимально допустимый радиус разворота, а с использованием прогнозируемого значения скорости - прогнозируемый минимально допустимый радиус разворота.
Таким образом, рассмотренный выше способ и его варианты позволяют экипажу адекватно оценить степень опасности рельефа и принять правильное решение о необходимости и характере маневрирования до возникновения опасной ситуации.
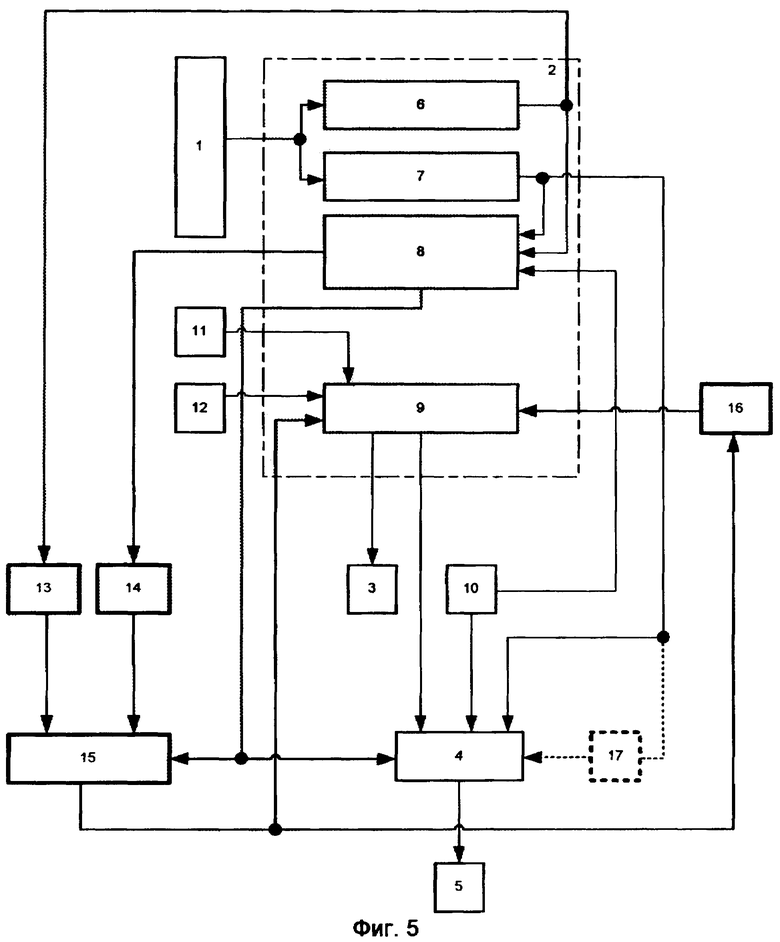
Одним из вариантов устройства, реализующего заявленный способ, является устройство, блок-схема которого представлена на фиг.5.
На фиг.5 устройство предупреждения столкновения летательного аппарата с рельефом местности содержит навигационную систему 1, обнаружитель препятствий 2, устройство сигнализации 3, видеогенератор 4 и дисплей 5 на его выходе, при этом обнаружитель препятствий 2 включает вычислитель параметров текущего динамического состояния 6, определитель координат 7, вычислитель прогнозируемой траектории 8 и компаратор 9, выход навигационной системы 1 подключен к входам вычислителя параметров текущего динамического состояния 6 и определителя координат 7, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории 8, третий вход которого соединен с базой аэронавигационной информации 10, первый и второй входы компаратора 9 соединены соответственно с блоком управления 11 и базой данных рельефа 12, первый и второй выходы компаратора соответственно соединены с входом устройства сигнализации 3 и первым входом видеогенератора 4, второй и третий входы которого соответственно соединены с базой аэронавигационной информации 10 и выходом определителя координат 7.
В отличие от устройства-прототипа введены: вычислитель минимально допустимых радиусов разворота 13, вычислитель прогнозируемых минимально допустимых радиусов разворота 14, формирователь безопасного пространственного коридора 15 и сканирующий узел компаратора 16, при этом вход вычислителя минимально допустимых радиусов разворота 13 соединен с выходом вычислителя параметров текущего динамического состояния 6, а его выход соединен с первым входом формирователя безопасного коридора 15, второй вход которого соединен с выходом вычислителя прогнозируемых минимально допустимых радиусов разворота 14, а его третий вход соединен с выходом вычислителя прогнозируемой траектории 8, выполненного с дополнительным выходом, который соединен с входом вычислителя прогнозируемых минимально допустимых радиусов разворота 14, а выход формирователя безопасного пространственного коридора 15 соединен с третьим входом компаратора 9 и входом сканирующего узла компаратора 16, выход которого соединен с четвертым входом компаратора 9, при этом четвертый вход видеогенератора 4 соединен с выходом вычислителя прогнозируемой траектории 8.
Возможен вариант устройства с введением узла памяти пройденной траектории 17, вход которого соединен с выходом определителя координат, а выход - с пятым входом видеогенератора 4.
Устройство работает следующим образом: обнаружитель препятствий 2 по информации, поступающей на его входы с выхода навигационной системы 1, с выхода базы данных рельефа 12, с выхода базы аэронавигационной информации 10 выполняет следующие функции, аналогичные прототипу: определяет координаты ЛА в определителе координат 7, вычисляет параметры текущего динамического состояния ЛА в вычислителе параметров текущего динамического состояния 6, вычисляет прогнозируемую траекторию в вычислителе прогнозируемой траектории 8.
Компаратор 9 определяет наличие совпадения пространства элементов базы данных рельефа с БПК, а не с прогнозируемой траекторией, используемой в прототипе для этой цели. По информации о параметрах текущего динамического состояния, поступающей с выхода вычислителя 6, в вычислителе 13 рассчитываются соответственно текущие минимально допустимые радиусы разворота. Вычислитель прогнозируемой траектории 8 выполнен с дополнительным выходом, с которого информация о прогнозируемых параметрах динамического состояния поступает на вход вычислителя 14, где рассчитываются прогнозируемые минимально допустимые радиусы разворота. По информации, поступающей с выходов вычислителей 13 и 14 соответственно на первый и второй входы формирователя безопасного коридора 15, и информации о прогнозируемой траектории, поступающей с выхода вычислителя 8 на третий вход того же формирователя, в нем рассчитываются границы безопасного пространственного коридора, информация о которых поступает с выхода формирователя 15 на третий вход компаратора 9 и на вход сканирующего узла компаратора 16. В компараторе 9 по результатам информационного сканирования рельефа, выполненного с помощью узла 16, осуществляется сравнения БПК с элементами рельефа. Если при сравнении БПК с элементами рельефа обнаруживается пространство, принадлежащее как БПК, так и пространству базы данных рельефа, то компаратор 9 на своих выходах (и, следовательно, на выходах обнаружителя 2) вырабатывает сигналы, поступающие на вход устройства сигнализации 3, уведомляющего об опасности, и на первый вход видеогенератора 4 для последующего отображения на дисплее 5 прогнозируемой траектории и текстов уведомлений об опасном рельефе, при этом на второй и третий входы видеогенератора так же, как и в прототипе, поступает информация с выхода БАИ 10 об аэродромах и с выхода определителя координат 7 о текущих координатах ЛА.
Для анализа экипажем текущих динамических возможностей ЛА по выполнению маневрирования полезно отображать на дисплее 5 участок пройденной траектории, ограниченный выбранным масштабом экрана, для чего дополнительно в состав устройства вводится блок памяти координат пройденной траектории 17, с выхода которого информация о запомненных координатах пройденной траектории поступает через видеогенератор 4 для отображения на дисплее 5.
Сигналы, поступающие на вход компаратора 9 с выхода блока управления 11, позволяют производить отключение сигнализации.
Таким образом, рассмотренный выше способ и устройство на его основе позволяют экипажу адекватно оценить степень опасности рельефа и принять правильное решение о необходимости и характере маневрирования.
Заявляемый способ и устройство на его основе позволяют реализовать новые преимущества систем предупреждения столкновения ЛА с землей:
- уведомить об опасном сближении с рельефом, за время, достаточное для выбора маневра ухода, включая разворот на обратный курс, без превышения допустимых перегрузок;
- повысить информированность экипажа о рельефе, представляющем опасность, путем формирования уведомляющей информации об опасном рельефе в зоне предполагаемого маневрирования и тем самым упростить задачу по принятию решения о необходимости маневрирования и выбору характера маневра для ухода от потенциально опасного рельефа;
- упростить экипажу задачу оценки степени опасности, которую представляет впереди расположенный рельеф, и выбора необходимого маневра путем отображения в одном масштабе проекций рельефа, пройденной и прогнозируемой траектории;
- снизить загрузку экипажа по предотвращению опасного сближения с рельефом путем своевременного уведомления об опасности рельефа, расположенного в зоне предполагаемого маневрирования.
Реализация перечисленных преимуществ позволяет повысить надежность предсказания возможности столкновения ЛА с рельефом местности и расширить возможности экипажа по предотвращению опасного сближения с рельефом путем повышения объема информации об опасности взаимного расположения ЛА и рельефа, а также повысить эргономичность представления информации экипажу путем отображения совмещенных проекций рельефа, пройденной и прогнозируемой траекторий.
Предложенный способ и его варианты полностью реализуются в устройстве, представленном на фиг.5.
Блоки и устройства, представленные на фиг.5, реализуются с использованием аппаратно-программных модулей, построенных на базе широко распространенных стандартных устройств аналоговой и цифровой вычислительной техники.
Для разработки программного обеспечения, реализующего необходимые функции упомянутых устройств, использовались стандартные языки программирования («С», «C++»), программно-математическое обеспечение фирм «MICROSOFT», «BORLAND» и известные формулы геодезических преобразований [11].
Блок 2, включающий блоки 6-9, и блоки 13-17 реализованы на базе интефированного модуля фирмы «AMPRO» с процессорным модулем фирмы «ANALOG MICRODEVICSES», работающего от источника питания фирмы «АЛЕКСАНДЕР ЭЛЕКТРИК». В указанных блоках также используются интерфейсные микросхемы фирмы «ANALOG DEVICES» и прецизионные программируемые усилители фирмы «TEXAS INSTRU MENTS».
Блок 3 реализован на базе аналоговых звуковых кодеров и декодеров фирмы «TEXAS INSTRUMENTS», операционных усилителей фирмы «MAXIM» и программируемых логических интегральных схем фирмы «ALTERA».
Блок 4 реализован на базе видеоконтроллера фирмы «SHARP», видеоусилителей фирмы «MAXIM» и высоковольтных преобразователей фирмы «TDK».
Блок 5 реализован на базе жидкокристаллической матрицы фирмы «SHARP».
Блоки 10 и 12 реализованы на базе постоянных запоминающих устройств «DiskOnChip» фирмы «M-SYSTEMS».
Блок 11 реализован на базе переключателей фирмы «BOURNS», соединителей фирмы «MOLEX», преобразователей напряжений фирмы «MAXIM».
Математическое моделирование, полунатурные и летные испытания системы СРПБЗ, в которой реализован заявляемый способ, показывают, что вероятности аварийных летных ситуаций по сравнению с прототипом снижается на 30-40%.
Проведенные летные испытания на самолетах Ту-154, Ту-204, Ту-214, Ту-334, Як-40, Як-42, Ил-76, Ил-86, Бе-200 показали эффективность использования заявляемого устройства.
Таким образом, заявляемое изобретение чрезвычайно перспективно для использования на борту ЛА с целью снижения вероятности летных происшествий.
Источники информации
1. Патент Франции №2731824, кл. G08G 5/04, заявл. 17.03.1995 г., опубл. 20.09.1998 г.
2. Патент Франции №2747492, кл. G08G 5/04, заявл. 15.04.1996 г., опубл. 17.10.1997 г.
3. Патент Франции №2773609, кл. G01С 5/00, заявл. 12.01.1998 г., опубл. 16.07.1999 г.
4. Патент США №5892462, кл. G08G 5/04, заявл. 20.06.1997 г., опубл. 06.04.1999 г.
5. Патент США №6021374, кл. G06F 163/00, заявл. 09.10.1997 г., опубл. 01.02.2000 г.
6. Патент России №2262746, кл. G08G 5/04, заявл. 10.06.2004 г., опубл. 20.10.2005 г.
7. Патент России №2271039, кл. G08G 5/04, B64D 45/04, заявл. 24.03.2005 г., опубл. 27.02.2006 г.
8. Кубланов М.С. Аэродинамика и динамика полета. М.: МГУ, 2000.
9. Остославский И.В., Стражева И.В. Динамика полета. Устойчивость и управляемость летательных аппаратов. М.: Машиностроение, 1965.
10. Остославский И.В., Стражева И.В. Динамика полета. Траектории летательных аппаратов. М.: Машиностроение, 1969.
11. Закатов П.С. Курс высшей геодезии. М.: Недра, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ОЦЕНКИ БЛИЗОСТИ ТРАЕКТОРИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ К ЗЕМНОЙ ПОВЕРХНОСТИ | 2008 |
|
RU2388059C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| Способ и система предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, многофункциональный, маневренный самолет с системой предупреждения столкновения с земной поверхностью | 2017 |
|
RU2664090C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2007 |
|
RU2331901C1 |
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ | 2007 |
|
RU2368954C2 |
| Способ и устройство управления полетом группы летательных аппаратов | 2022 |
|
RU2786276C1 |
Группа изобретений относится к области обеспечения безопасности полетов и может быть использована для летательных аппаратов (ЛА) различных видов. Согласно способу определяют местоположение ЛА с помощью навигационной системы, производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию, сопоставляют прогнозируемую траекторию с рельефом местности, определяют опасный рельеф и предупреждают о наличии опасности. При этом непрерывно перед сопоставлением прогнозируемой траектории с рельефом местности вычисляют на основе параметров текущего динамического состояния минимально допустимые радиусы разворота, затем прогнозируют упомянутые радиусы разворота на время определения опасного рельефа, а далее ведут сопоставление прогнозируемой траектории с рельефом местности путем сканирования пространства в безопасном для упомянутой траектории коридоре. Границу безопасного коридора определяют исходя из возможности разворота ЛА на обратный курс в соответствии с прогнозируемыми значениями минимально допустимых радиусов разворота. Опасный рельеф определяют на основании упомянутого сопоставления прогнозируемой траектории с рельефом местности. Особенностью устройства, функционирующего на основе предложенного способа, является введение вычислителей минимально допустимых радиусов разворота на текущий момент и прогнозируемых на заданное время, формирователя безопасного пространственного коридора и сканирующего узла компаратора, позволяющего сопоставлять безопасный коридор с рельефом местности. Достигаемый технический результат - повышение безопасности навигации благодаря предсказанию угрозы столкновения летательного аппарата ЛА с рельефом с учетом возможности разворота ЛА на обратный курс. 2 н. и 2 з.п. ф-лы, 5 ил.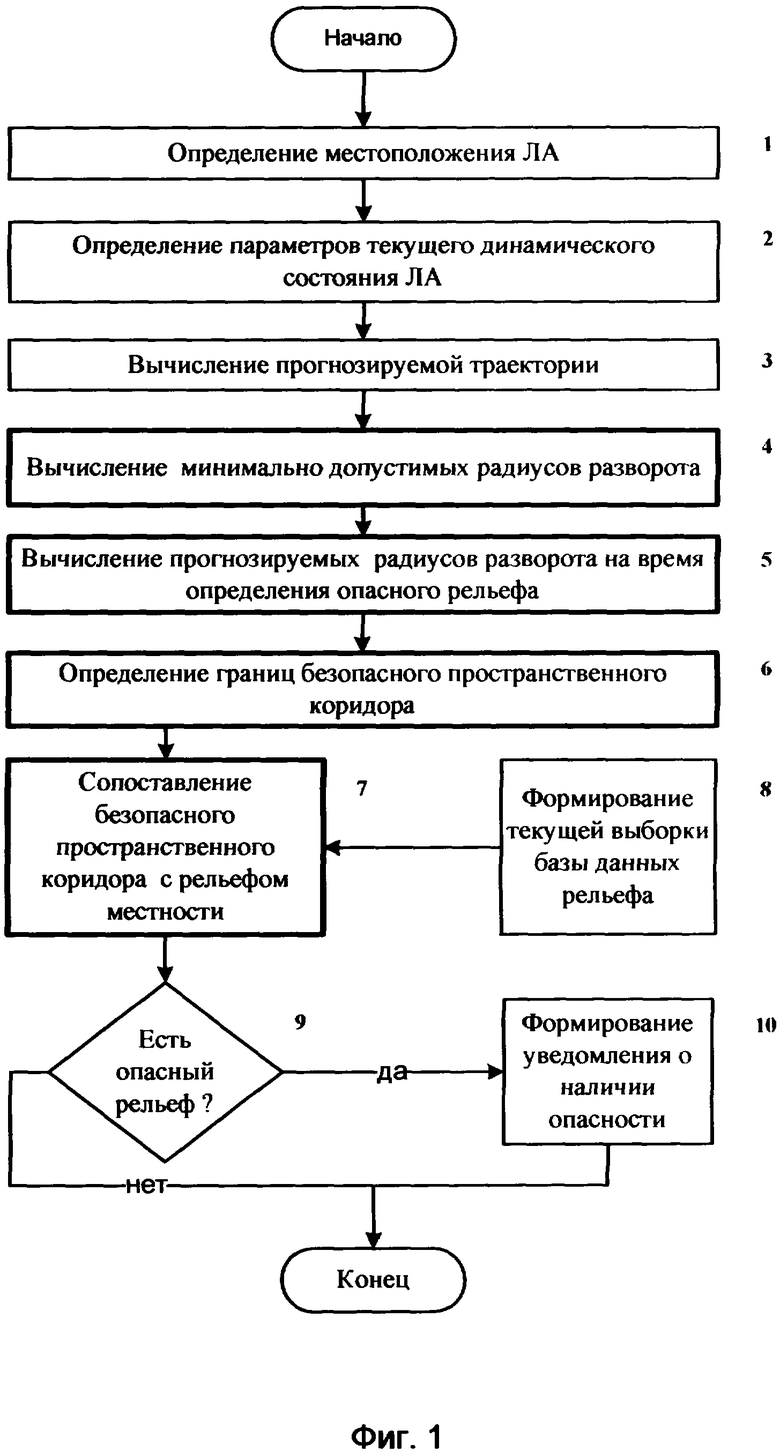

где L - ширина безопасного коридора;
Rпр.п. - прогнозируемый минимально допустимый радиус правого разворота;
Rпр.л. - прогнозируемый минимально допустимый радиус левого разворота;
l1 - максимальная ошибка определения местоположения летательного аппарата;
l2 - минимально безопасное боковое расстояние летательного аппарата от рельефа местности.
| US 6021374 A, 01.02.2000 | |||
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| ОБОРОТНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР ДЛЯ НИЗКОАКТИВНЫХ И СРЕДНЕАКТИВНЫХ РАДИОАКТИВНЫХ ОТХОДОВ | 2022 |
|
RU2783912C1 |
| WO 00/48159 А2, 17.08.2000 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

