Настоящее изобретение относится к способу и устройству для обеспечения безопасности низковысотного автоматического полета летательного аппарата, который (автоматически) направляется по низковысотной траектории полета, содержащей горизонтальную траекторию и вертикальную траекторию.
Хотя и не исключительно, настоящее изобретение в частности применимо для военно-транспортного самолета, который имеет низкое отношение тяги к весу и высокую инерцию, и который обычно выполняет маневры относительно медленно.
В рамках настоящего изобретения выражение “низковысотный полет” означает полет по траектории полета (на низкой высоте), позволяющей летательному аппарату следовать как можно ближе к пролетаемой земной поверхности, в частности так, чтобы он не был засечен. Поэтому такая низковысотная траектория полета обычно находится на самой низкой заранее определенной высоте от земной поверхности, например, 500 футов (около 150 метров).
Из-за такой близости к земле любое вертикальное отклонение летательного аппарата вниз (за определенные границы безопасности) относительно следуемой траектории полета во время направления летательного аппарата по указанной траектории представляет собой существенный риск столкновения с пролетаемой земной поверхностью (непосредственно с землей или с конструкцией или элементами, расположенными на земле). Существование такого риска, конечно, не приемлемо (или только с вероятностью возникновения на полетный час, меньшей, чем заранее определенное требование по безопасности).
Настоящее изобретение имеет своей целью обеспечение безопасности низковысотного полета летательного аппарата (который автоматически направляется по траектории полета, содержащей горизонтальную траекторию и вертикальную траекторию) таким образом, чтобы сделать любое столкновение летательного аппарата с пролетаемой поверхностью земли маловероятным.
Более конкретно настоящее изобретение применяется для автоматического полета, который является автономным, то есть автоматического полета, который выполняется исключительно с помощью находящихся на борту систем навигации, управления и цифровой базы данных земной поверхности, без помощи какого-либо находящегося в носовой части излучающего устройства такого, как, например, радар. Известно, что автономный автоматический полет такой, как этот, может быть подвержен целому ряду ошибок, в особенности относящихся к:
- навигации: положение, выдаваемое бортовой навигационной системой не является точным реальным положением летательного аппарата;
- управления: автопилот подстраивает положение, выдаваемое системой навигации к траектории, вычисляемой системой управления полетом. Такое подстраивание проявляет присущие характеристики, которые передают возможность автопилота направлять летательный аппарат по требуемой траектории. Ошибка управления может также вносится в ходе полета из-за пилотажного командного прибора, которым пилот должен действовать вручную;
- траектории полета: точность этой траектории зависит от точности алгоритма и используемого компьютерного процессора, а также от особенно вероятных ошибок цифрового моделирования пролетаемой земной поверхности (то есть ошибок, относящихся к используемой цифровой базе данных земной поверхности).
Следует отметить, что контроль за отклонением между измеряемым положением летательного аппарата и вычисляемой низковысотной траекторией полета, по которой должен следовать летательный аппарат, для того, чтобы определять чрезмерное вертикальное отклонение, не дает возможности, в частности, учитывать влияние навигационных ошибок и ошибок, относящихся к используемой цифровой базе данных земной поверхности.
Настоящее изобретение направлено на устранение этих недостатков. Оно относится к особенно эффективному способу обеспечения безопасности низковысотного автоматического и автономного полета летательного аппарата, который таким образом направляется (автоматически или автономно) по низковысотной траектории полета.
С этой целью согласно изобретению указанный способ характеризуется тем, что:
А/ в ходе указанного низковысотного полета автоматически и повторяющимся образом выполняют следующий ряд последовательных операций:
а) определяют текущее пороговое значение в зависимости, по меньшей мере, от текущей высоты указанной низковысотной траектории полета, по которой следует летательный аппарат, а также от навигационных ошибок летательного аппарата, ошибок управления летательным аппаратом и ошибок в вычислении указанной траектории полета;
b) измеряют текущую реальную высоту летательного аппарата над пролетаемой поверхностью; и
с) эту измеренную текущую реальную высоту сравнивают с указанным текущим пороговым значением;
В/ если указанная текущая реальная высота становится меньшей или равной указанному текущему пороговому значению, выдают сигнал тревоги (аудио и/или видео).
Таким образом, благодаря изобретению можно определять любое чрезмерное вертикальное отклонение вниз с помощью контроля за текущей реальной высотой летательного аппарата (то есть с помощью ее повторного измерения и сравнения с указанным заранее определенным пороговым значением). Такое подтверждение в особенности эффективно, поскольку оно учитывает не расчетную высоту, а текущую реальную высоту летательного аппарата, то есть действительную высоту относительно реальной земной поверхности.
Кроме того, как описано далее, указанное пороговое значение определяют таким образом, чтобы учитывать различные ошибки, которые могут появляться во время низковысотного автоматического и автономного полета, такого как этот.
В предпочтительном варианте осуществления на этапе А/а) указанное пороговое значение Н0 вычисляют с помощью следующего выражения (1):
в котором
- Z1 представляет собой текущую высоту указанной траектории полета (вычисленную), которая соответствует текущему горизонтальному положению летательного аппарата, то есть высоту, которая соответствует ортогональной проекции текущего горизонтального положения летательного аппарата на вычисляемую траекторию полета;
- Zmoy представляет собой среднюю высоту цифровой земной поверхности под летательным аппаратом, которая выдается цифровой базой данных земной поверхности; и
- значения Li представляют собой пределы, по меньшей мере, навигационных ошибок или ошибок управления, и ошибок, относящихся к указанной цифровой базе данных земной поверхности, которая используется для вычисления указанной низковысотной траектории полета. Каждый предел отображает тот факт, что соответствующая ошибка не больше, чем этот предел, с большей вероятностью, чем объективная вероятность. В этом случае объективная вероятность является такой вероятностью, для которой сигнал тревоги не должен выдаваться во время низковысотного полета.
Кроме того, когда земная поверхность, пролетаемая летательным аппаратом, является по существу плоской:
- Z1 представляет собой заранее определенную дежурную высоту HG, например, 500 футов (около 150 м); и
- Zmoy считается равной нулю,
для того чтобы получить упрощенное выражение для вычисления порогового значения H0, а именно
Более того, преимущественно, на этапе А/b) указанную реальную высоту измеряют с помощью радиовысотомера.
Дополнительно, на этапе В/, если указанная текущая реальная высота становится меньшей или равной указанному текущему пороговому значению, в дополнение к выдаче сигнала тревоги низковысотный полет прерывают, и летательным аппаратом управляют (автоматически или вручную) так, чтобы увеличить его высоту таким образом, чтобы привести его на безопасную высоту (до возможного возвращения к низковысотному полету, если подтверждается, что это возможно).
Настоящее изобретение также относится к устройству для обеспечения безопасности низковысотного полета летательного аппарата, который автоматически (и автономно) направляется по (низковысотной) траектории полета.
Согласно изобретению это устройство отличается тем, что оно содержит:
- первое средство для определения текущего порогового значения, в зависимости, по меньшей мере, от текущей высоты указанной низковысотной траектории полета (заранее вычисленной), по которой следует летательный аппарат, а также от навигационных ошибок, ошибок управления и ошибок в вычислении траектории полета. Последние зависят в основном от ошибки, относящейся к используемой цифровой базе данных земной поверхности, возникает ли она из загруженного на земле файла, или она появляется на борту летательного аппарата, например из-за радара, в режиме обзора поверхности;
- второе средство, в частности, по меньшей мере, один радиовысотомер для измерения текущей реальной высоты летательного аппарата над пролетаемой земной поверхностью во время низковысотного полета по указанной траектории полета;
- третье средство, которое связано с указанными первым и вторым средствами, для сравнения указанной текущей реальной высоты с указанным текущим пороговым значением; и
- четвертое средство, которое связано с указанным третьим средством, для выдачи сигнала тревоги, если указанная текущая реальная высота становится меньшей или равной указанному текущему пороговому значению.
Кроме того, в конкретном варианте осуществления устройство согласно изобретению содержит пятое средство для управления летательным аппаратом таким образом, чтобы увеличивать его высоту и приводить его на безопасную высоту, когда указанная текущая реальная высота становится меньшей или равной указанному текущему пороговому значению.
Приложенные чертежи поясняют способ, которым может быть осуществлено изобретение. На этих чертежах одинаковые ссылки обозначают одинаковые элементы.
Фиг.1 - блок-схема устройства согласно изобретению.
Фиг.2 - схематическое изображение в вертикальной плоскости основных характеристик, учитываемых при осуществлении настоящего изобретения.
Устройство 1 согласно изобретению, схематически показанное на фиг.1, предназначено для обеспечения безопасности низковысотного полета летательного аппарата А, например транспортного самолета, истребителя или вертолета.
Указанное устройство 1 связано со стандартной системой 2 пилотирования, которая установлена на борту летательного аппарата А и которая содержит:
- средство, например навигационную систему, для определения траектории Т0 полета, содержащей траекторию TL, определяемую в горизонтальной плоскости, и вертикальную траекторию TV (или профиль полета), определяемую в вертикальной плоскости. Для того чтобы иметь возможность выполнять низковысотный полет, траектория Т0 низковысотного полета должна позволять летательному аппарату А следовать как можно ближе к пролетаемой земной поверхности ТА (на минимальной высоте от земли, соответствующей безопасной высоте, выбранной пилотом); и
- средство управления, например автопилот для направления летательного аппарата А по указанной траектории Т0 полета. Это средство управления определяет команды для пилотирования летательного аппарата А, которые являются такими командами, которые позволяют летательному аппарату следовать по указанной траектории Т0 полета. Эти команды пилотирования передаются средству для активирования элементов управления, таких как, например, поверхности управления (руль направления, руль высоты и так далее) летательного аппарата А.
Поэтому согласно изобретению указанное устройство 1, которое предназначено для обеспечения безопасности низковысотного полета летательного аппарата А, который автоматически направляется вдоль низковысотной траектории Т0 полета, содержит:
- средство 3 для определения текущего порогового значения Н0 в зависимости, по меньшей мере, от текущей высоты Z1 (то есть высоты в оцениваемом текущем положении Р2 летательного аппарата А и определенном ниже) указанной низковысотной траектории Т0 полета, по которой следует летательный аппарат А, а также от навигационных ошибок летательного аппарата А, ошибок управления летательным аппаратом А и ошибок в вычислении указанной траектории Т0 полета;
- средство 4 для измерения (повторяющимся образом) текущей реальной высоты RA летательного аппарата А над реальной пролетаемой поверхностью земли ТА;
- средство 5, которое соединено с помощью связей 6 и 7 соответственно с указанными средствами 3 и 4 и которое предназначено для сравнения (периодически) указанной реальной высоты RA с указанным текущим пороговым значением Н0; и
- средство 8, которое соединено с помощью связи 9 с указанным средством 5 и которое предназначено для выдачи сигнала тревоги, как только указанная измеренная текущая реальная высота RA летательного аппарата А становится меньшей или равной указанному текущему пороговому значению Н0.
В конкретном варианте осуществления изобретения
- указанное средство 4 содержит, по меньшей мере, один радиовысотомер, то есть радионавигационное устройство, которое установлено на борту летательного аппарата А и которое использует отражение радиоэлектрических волн от земли (реальная земная поверхность ТА) с целью определения реальной высоты RA летательного аппарата А над указанной Землей (реальная земная поверхность ТА); и
- указанное средство 8 выполнено таким образом, чтобы выдавать визуальный и/или аудиосигнал тревоги.
Устройство 1 согласно изобретению также содержит средство 10, которое соединено с помощью связи 11 со средством 5 и которое выполнено так, чтобы управлять летательным аппаратом 5 таким образом, чтобы увеличивать его высоту и приводить его на заранее определенную безопасную высоту, когда текущее реальное значение высоты RA летательного аппарата А становится меньшим или равным указанному текущему пороговому значению H0.
В предпочтительном варианте осуществления изобретения указанное средство 10 является автоматическим средством пилотирования и содержит, например, вышеуказанную систему 2 автоматического пилотирования. Однако это средство 10 может содержать также стандартное средство ручного пилотирования.
Настоящее изобретение в особенности применимо для автоматического полета, который является автономным, то есть автоматического полета, который выполняется исключительно благодаря системам навигации, управления и цифровой базе данных земной поверхности, которые находятся на борту, и без помощи какого-либо носового излучающего устройства, такого как, например, радар.
Устройство 1 согласно изобретению выполнено с возможностью определения любых чрезмерных направленных вертикально вниз отклонений с помощью контроля текущей высоты RA летательного аппарата А (то есть измеряя ее повторно и сравнивая ее с повторным образом вычисляемым указанным пороговым значением Н0). Такое подтверждение особенно эффективно, поскольку оно учитывает реальную текущую высоту RA летательного аппарата А, а не расчетную высоту. Эта высота RA является реальной высотой, поскольку ее измеряют относительно реальной земной поверхности TA, а не вычисляют относительно оцениваемой земной поверхности, что описано ниже со ссылкой на фиг.2.
Более того, как также описано ниже, указанное пороговое значение H0 определяют таким образом, чтобы учитывать различные ошибки, которые могут возникнуть во время низковысотного автоматического и автономного полета. Более того, оно также вычисляется относительно заранее вычисленного справочного значения так, что способ согласно изобретению называется способом, «основанным на радиовысотомерной высотной корреляции» (а именно корреляции между высотой RA и заданной точкой полета, представляющей заранее вычисленную траекторию Т0 полета).
Известно, что автоматический и автономный полет, такой как этот, может быть подвержен целому набору мгновенных ошибок как в вертикальной плоскости, так и в боковой плоскости, и в особенности:
- навигационной ошибке PEE: положение, выдаваемое бортовой навигационной системой не является точным реальным положением летательного аппарата А;
- ошибке управления FTE; средство управления системы автоматического пилотирования 2 подстраивает положение, выдаваемое навигационной системой, к траектории Т0 полета, вычисляемой системой управления полетом. Это подстраивание проявляет присущие характеристики, которые передают возможность средства управления (например, автопилота) направлять летательный аппарат вдоль требуемой траектории Т0 полета. Ошибка управления может также вноситься в ходе полета из-за пилотажного командного прибора, которым пилот может действовать вручную; и
- ошибке PDE траектории полета: точность траектории полета зависит от точности используемых алгоритма и процессора компьютера, а также и в особенности, от возможной ошибки цифрового моделирования пролетаемой земной поверхности (то есть ошибки DTDBE, относящейся к цифровой базе данных земной поверхности, используемой для вычисления траектории Т0 полета).
Следует отметить, что сумма различных ошибок определяет общую системную ошибку TSE.
В предпочтительном варианте осуществления изобретения указанное средство 3 вычисляет указанное текущее пороговое значение Н0 с помощью следующего выражения (1):
в котором:
- Z1 представляет собой текущую высоту вдоль указанной траектории Т0 полета, по которой следует указанный летательный аппарат А, то есть высоту в положении Р2, описываемую далее, а именно высоту траектории Т0 полета, соответствующую вычисляемому текущему горизонтальному положению летательного аппарата А;
- Zmoy представляет собой среднюю высоту цифровой земной поверхности под летательным аппаратом А в реальном положении Р1, описываемом ниже. Цифровая земная поверхность РТ поступает из цифровой базы данных земной поверхности, как описано далее; и
- значения Li представляют собой пределы, по меньшей мере:
- вертикальных навигационных ошибок PEE;
- вертикальных ошибок FTE управления;
- вертикальных ошибок DTDBE, относящихся к цифровой базе данных земной поверхности, которая используется для вычисления указанной низковысотной траектории Т0 полета.
Для четкого изложения особенностей настоящего изобретения вернемся к фиг.2, на которой в вертикальной плоскости показаны:
- так называемый реальный летательный аппарат А, то есть летательный аппарат, показанный в его реальном положении Р1;
- расчетная вертикальная траектория TV траектории Т0;
- так называемый оцениваемый летательный аппарат А, то есть летательный аппарат А, показанный в его оцениваемом положении Р2 на указанной расчетной траектории Т0 полета. Положения Р1 и Р2 соответствуют одному и тому же моменту времени;
- полетный туннель CV, определяемый вокруг траектории Т0 полета (в этом примере вертикальной траектории TV), и показанные верхний предел CV1 и нижний предел CV2;
- профиль РТ земной поверхности, такой как он определяется используемой цифровой базой данных земной поверхности;
- отфильтрованный профиль РТF земной поверхности, вычисляемый на основе указанного профиля PTF земной поверхности, как указано далее;
- отфильтрованный профиль TF земной поверхности, который получается с помощью перемещения вверх безопасной высоты НG, например, 500 футов (около 150 м) на основе указанного отфильтрованного рельефа PTF земной поверхности; и
- реальный профиль ТА земной поверхности, то есть физическая земная поверхность.
С точки зрения эксплуатации горизонтальная (боковая) траектория TL определяется сначала оператором (непосредственно или через систему автомаршрутизации). По этой горизонтальной траектории TL вычисляется вертикальная траектория TV низковысотного полета над отфильтрованным профилем TF земной поверхности, который получается на основе отфильтрованного профиля PTF земной поверхности. Последний определяется на основе профиля PT земной поверхности, исходящего из цифровой базы данных земной поверхности следующим образом: для каждой абсциссы вдоль горизонтальной траектории TL соответствующий подъем земной поверхности является самым высоким подъемом PT (то есть выбранным из цифровой базы данных земной поверхности) над выбранной поверхностью, которая соответствует в общем в горизонтальном направлении ширине полетного коридора плюс, с каждой стороны траектории, пределу ошибки PDE, соответствующей нормативу вероятности. В горизонтальном направлении выбранная поверхность, таким образом, учитывает горизонтальные ошибки.
Следовательно, в рамках настоящего изобретения сигнал тревоги выдается, когда вертикальное отклонение между, с одной стороны, текущим реальным положением Р1 (реального летательного аппарата А) и, с другой стороны, соответствующим положением Р2 вычисляемой траектории TV больше, чем пороговое значение тревоги, то есть когда:
высота RA ≤ определяемой высоте - средняя высота цифрового наземного профиля под реальным летательным аппаратом А - (сумма пределов ошибок FTЕ, PEE, DTDBE), где
- определяемая высота является высотой Z1 положения Р2;
- ошибки FTЕ, PEE, DTDBE являются вертикальными составляющими указанных ошибок FTS, PEE, DTDBE;
- пределы ошибок FTЕ, PEE и DTDBE являются пределами этих ошибок, заданных для вероятности, которая соответствует максимальной эксплуатационно допустимой вероятностью отклонения для туннеля CV (10-3, 10-4/hdv и так далее), где hdv обозначает летные часы;
- средняя высота цифрового профиля земной поверхности под летательным аппаратом А является средней высотой в предельном круге выбранной ошибки РЕЕ (соответствующей выбранной максимальной вероятности), которая центрируется на расчетном горизонтальном положении летательного аппарата А, и задается для той же самой допустимой вероятности, как и для указанных выше вертикальных ошибок.
Над плоской земной поверхностью сигнал тревоги выдается, когда:
- высота RA ≤ безопасной высоте HG - (сумма пределов ошибок FTЕ, PEE и DTDBE).
В особенности, когда земная поверхность, пролетаемая летательным аппаратом А, является по существу плоской, согласно изобретению предусматривается, что:
- Z1 представляет собой дежурную высоту HG в указанном выражении (1); и
- Zmoy считается равной нулю
так, чтобы получить упрощенное выражение для вычисляемого порогового значения H0, а именно
Далее рассматривается системная ошибка, которая возникает с вероятностью Pj и которая вызывает отклонение dj вверх или вниз с одинаковой вероятностью.
Летательный аппарат А сталкивается с землей (реальная земная поверхность ТА), если отклонение вниз с системной ошибкой или без системной ошибки больше, чем дежурная высота HG, обычно 500 футов (около 150 м), и никакого сигнала тревоги не выдается средством 8.
Более того, это предполагает, что команда летательного аппарата А может противодействовать отклонению, возникающему из-за этой ошибки, сразу от момента выдачи сигнала тревоги и, следовательно, потеря высоты во время этого маневра меньше, чем 500 футов минус порог выдачи сигнала тревоги:
(сигнал тревоги не выдается)
с:

Следует отметить, что d представляет собой значение дежурной высоты HG, выбираемое обычно пилотом летательного аппарата А.
Предыдущая вероятность должна быть меньше, чем выбранное требование по безопасности, например, 10-9/hdv. Можно увидеть, что с Р (сигнал тревоги не выдается) ‹1 вероятность того, что TSЕ≥500 футов (или, что TSЕ≥ (500-dj)) может быть больше, чем 10-9/hdv, поскольку необходимо объединить ее с вероятностью необнаружения выхода их туннеля CV.
Поэтому порог сигнала тревоги (пороговое значение Н0) также зависит от возможности возврата летательного аппарата А в присутствии системной ошибки.
Например, если
PDE ≈ 30 м при 90%;
PEE ≈ 70 м при 99,99999%;
PSE ≈ 60 м при 95%,
тогда, полагая, что эти ошибки являются гауссовыми:
- общее стандартное отклонение σ ошибки TSE=80 футов (около 24 м), поэтому TSE=1,960×80≈150 футов (около 45 м) при 95%;
- Р (сигнал тревоги не выдается): должна быть согласована с требованием по эксплуатационной готовности относительно летательного аппарата А.
Если рассматривается системная ошибка, случающаяся с вероятностью (например) Pj=10-5/hdv и dj=300 футов (около 90 м), то вероятность того, что летательный аппарат А столкнется с землей, ТА будет около 6,2×10-2/hdv без сигнала тревоги.
Но если сигнал тревоги предусматривается, то вероятность того, что этот сигнал не будет выдан, составляет только ≤1,6×10-2/hdv, так что вероятность удара с землей будет 10-9/hdv (при условии, что потеря высоты во время выполнения маневра возвращения, начинающегося как только будет выдан сигнал тревоги, будет меньше 200 футов (около 60 м) (200=500-300).
Это требование в 1,6×10-2/hdv применяется в пределах текущих систем.
Следовательно, для осуществления настоящего изобретения, после того, как на земле будут получены:
- оцененные элементарные ошибки (навигации, управления, цифровой базы данных земной поверхности и так далее), давая возможность таким образом в случае гауссовой ошибки определять стандартное отклонение каждой ошибки и, после этого отклонение общей ошибки (отдельно от системной ошибки);
- определенная, по меньшей мере, одна системная ошибка, которая учитывается при анализе безопасности, а также вероятность ее возникновения и вертикальное отклонение, которое она вызывает;
- вычисленная потеря высоты во время маневра возвращения в присутствии этой системной ошибки; и
- заданный уровень безопасности в форме вероятности столкновения с землей, который не должен быть превышен, то есть вероятность того, что общее отклонение больше или равно выбираемой минимальной безопасной высоте (обычно 500 футов),
будет достаточно
- определить пороговое значение Н0 согласно эксплуатационным требованиям (максимальную вероятность прерывания полета из-за сигнала тревоги и выполнения отслеживания траектории), а также в терминах безопасности (вероятность столкновения с землей); и
- решить вопросы для того, чтобы соответствовать требованиям по вероятности для того, чтобы не обнаруживать превышения этого порогового значения и соответствовать общему требованию по безопасности.
Следует отметить, что команда летательного аппарата А должна знать о том, что устройство 1 согласно изобретению может подавать сигнал тревоги, когда реальная высота RA летательного аппарата А намного больше, чем дежурная высота HG. Такой случай обычно может возникнуть, когда траектория Т0 полета опускается во впадину на равнине, но летательный аппарат А отклоняется от нее, чтобы был выдан сигнал тревоги.
Вообще будет происходить подтверждение того, что эта траектория Т0 полета
- пролетаема в отношении характеристик набора высоты летательного аппарата А;
- маневрируема в отношении максимально допустимых коэффициентов нагрузок;
- по-прежнему расположена на дежурной высоте над отфильтрованной поверхностью PTF.
Изобретение относится к области приборостроения и может найти применение в системах обеспечения безопасности полета летательного аппарата (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство (1) содержит первое средство (3) для определения первого порогового значения. Это значение зависит, по меньшей мере, от траектории полета ЛА, а также от текущих значений навигационных ошибок. Второе средство (4) предназначено для измерения текущей или реальной высоты ЛА. Третье средство (5) - для сравнения указанной текущей реальной высоты с пороговым значением. Четвертое средство (8) - для выдачи сигнала тревоги, если текущая реальная высота падает до или ниже порогового значения. Пятое средство (10) - для управления ЛА, когда текущее реальное значение высоты падает ниже или до порогового значения. 4 н. и 6 з.п. ф-лы, 2 ил.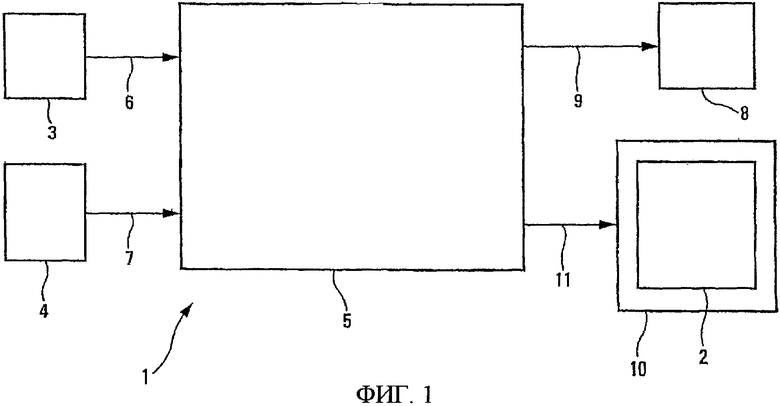
1. Способ для обеспечения безопасности низковысотного полета летательного аппарата (А), который автоматически направляется по низковысотной траектории полета, по которому
А/ в ходе указанного низковысотного полета автоматически и с повторами выполняют следующий ряд последовательных операций:
a) определяют текущее пороговое значение, зависящее, по меньшей мере, от текущей высоты (Z1) указанной низковысотной траектории полета, которой следует летательный аппарат (А), а также от навигационных ошибок летательного аппарата (А), ошибок управления летательного аппарата (А) и ошибок в вычислении указанной траектории полета;
b) измеряют текущую реальную высоту (RA) летательного аппарата (А) над пролетаемой поверхностью (ТА) земли; и
c) эту измеренную текущую реальную высоту (RA) сравнивают с указанным текущим пороговым значением; и
В/ если указанная текущая реальная высота (RA) становится меньшей или равной указанному текущему пороговому значению, выдают сигнал тревоги.
2. Способ по п.1, в котором на этапе А/а) указанное пороговое значение НО вычисляют с помощью следующего выражения:
в котором Z1 представляет собой текущую высоту указанной траектории полета, которой следует летательный аппарат (А);
Zmoy представляет собой среднюю высоту земной поверхности под летательным аппаратом (А), которая исходит из цифровой базы данных земной поверхности; и
значения Li представляют собой пределы, по меньшей мере, указанных ошибок навигации и управления, и ошибок, относящихся к указанной цифровой базе данных земной поверхности, которую используют для вычисления указанной низковысотной траектории полета.
3. Способ по п.2, в котором, когда земная поверхность (ТА), пролетаемая летательным аппаратом (А) является по существу плоской:
Z1 представляет собой заранее определенную дежурную высоту; и
Zmoy считается равным нулю.
4. Способ по п.1, в котором на этапе А/b) указанную реальную высоту (RA) измеряют с помощью радиовысотомера.
5. Способ по п.1, в котором на этапе В/, если указанная текущая реальная высота (RA) становится меньше или равна указанному текущему пороговому значению, то низковысотный полет прерывают и летательным аппаратом (А) управляют таким образом, чтобы увеличить его высоту так, чтобы привести его на безопасную высоту.
6. Устройство для обеспечения безопасности низковысотного полета летательного аппарата (А), который автоматически направляется по низковысотной траектории полета, содержащее:
первые средства (3) для определения текущего порогового значения зависящего, по меньшей мере, от текущей высоты (Z1) указанной низковысотной траектории полета, которой следует летательный аппарат (А), а также от навигационных ошибок, ошибок управления и ошибок в вычислении указанной траектории полета;
вторые средства (4) для измерения текущей реальной высоты (RA) летательного аппарата (А), над пролетаемой земной поверхностью (ТА) в ходе низковысотного полета вдоль указанной траектории полета;
третьи средства (5), которые связаны с указанными первыми и вторыми средствами (3, 4) для сравнения указанной текущей реальной высоты (RA) с указанным текущим пороговым значением; и
четвертые средства (8), которые связаны с указанными третьими средствами (5), для выдачи сигнала тревоги, если указанная текущая реальная высота (RA) становится меньшей или равной указанному текущему пороговому значению.
7. Устройство по п.6, в котором указанные вторые средства (4) содержат, по меньшей мере, один радиовысотомер.
8. Устройство по п.6, которое дополнительно содержит пятые средства (10) для управления летательным аппаратом (А) таким образом, чтобы повышать его высоту и приводить его на безопасную высоту, когда указанная текущая реальная высота (RA) становится меньшей или равной указанному текущему пороговому значению.
9. Летательный аппарат, который содержит устройство (1), такое как описано в любом из пп.6-8.
10. Летательный аппарат, который содержит устройство (1), выполненное с возможностью осуществления способа, описанного в любом из пп.1-5.
| FR 2859177 А1, 04.03.2005 | |||
| US 5922031 А, 13.07.1999 | |||
| US 3018049 А, 23.01.1962 | |||
| US 4144571 А, 13.03.1979 | |||
| Регулируемая тепловая труба | 1980 |
|
SU937963A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

