Настоящее изобретение относится к способу и устройству оповещения и предупреждения столкновения летательного аппарата с наземными препятствиями, в частности для транспортного самолета.
Известно, что такое устройство, например, типа TAWS (система оповещения и предупреждения столкновения с наземными препятствиями) или типа GPWS (система предупреждения опасного сближения с землей), предназначено для обнаружения любого риска столкновений летательного аппарата с окружающими наземными препятствиями и для предупреждения экипажа, когда этот риск обнаружен, с тем чтобы последний мог затем осуществить маневр уклонения от столкновения с наземными препятствиями. Это устройство обычно содержит:
- первое средство для изучения профиля наземных препятствий, по меньшей мере, впереди летательного аппарата;
- второе средство для определения траектории уклонения от столкновения летательного аппарата;
- третье средство, соединенное с упомянутым первым и вторым средствами, для проверки, существует ли риск столкновения с наземными препятствиями летательного аппарата;
- четвертое средство для выдачи сигнала тревоги в случае обнаружения риска столкновения посредством упомянутого третьего средства.
Обычно упомянутое второе средство определяет траекторию уклонения от столкновения (которая учитывается посредством третьего средства, с тем чтобы обнаружить риск столкновения с наземными препятствиями) посредством использования кривой, демонстрирующей постоянное и неизменяемое значение обычно 6° для транспортного самолета, вне зависимости от типа летательного аппарата и вне зависимости от его фактических летно-технических характеристик.
Разумеется, этот режим расчетов имеет риск недооценки или переоценки фактических летно-технических характеристик летательного аппарата, тем самым, возможно, приводя к слишком поздним обнаружениям риска столкновения или ложным сигналам тревоги. Следовательно, этот режим расчетов не является полностью надежным.
Документ EP 0750238 раскрывает устройство предупреждения столкновения с наземными препятствиями вышеупомянутого типа. Это известное устройство предусматривает определение двух траекторий, которые затем сравниваются с профилем пролетаемой местности, причем одна из упомянутых траекторий представляет прогнозируемую фактическую траекторию летательного аппарата, а другая траектория, возможно, соответствует, в частности, предсказанной траектории набора высоты. Этот документ, известный из уровня техники, предусматривает учет возможностей маневрирования летательного аппарата, чтобы спрогнозировать эти траектории, тем не менее, без указания способа, которым эти траектории фактически рассчитаны или спрогнозированы.
Настоящее изобретение относится к способу предупреждения столкновения летательного аппарата с наземными препятствиями, который дает возможность устранить вышеуказанные недостатки.
Для этой цели согласно изобретению упомянутый способ отличается тем, что:
I) на предварительном этапе формируется, по меньшей мере, одна база данных характеристик летательного аппарата, причем эти характеристики связаны с кривой маневра уклонения от столкновения, пролетаемой летательным аппаратом, как функция от конкретных параметров полета;
II) в ходе дальнейшего полета летательного аппарата:
a) определяются фактические значения упомянутых конкретных параметров полета;
b) определяется траектория уклонения от столкновения на основе этих фактических значений упомянутых конкретных параметров полета и упомянутой базы данных;
c) с помощью упомянутой траектории уклонения от столкновения и профиля наземных препятствий, находящихся, по меньшей мере, впереди судна, выполняется проверка, чтобы удостовериться, есть ли риск столкновения с упомянутыми наземными препятствиями для упомянутого летательного аппарата;
d) в случае риска столкновения выдается соответствующий сигнал оповещения.
Таким образом, посредством изобретения вместо использования упомянутого выше постоянного и неизменяемого значения кривой определяется траектория уклонения от столкновения посредством учета фактических характеристик летательного аппарата на основании характеристик упомянутой базы данных и на основании измерений упомянутых фактических значений. Следовательно, обнаружение риска столкновения с наземными препятствиями учитывает фактические характеристики летательного аппарата, тем самым обеспечивая возможность, в частности, избегать ложных тревог и предоставлять весьма надежное управление. Следует отметить, что вышеупомянутый документ EP 0750238 не предусматривает определение и использование кривой (траектории уклонения от столкновения), которая зависит от фактических значений конкретных параметров полета.
Преимущественно, для того чтобы сформировать упомянутую базу данных, определяется множество значений упомянутой кривой, которые являются характерными для каждого проявления различных значений в отношении упомянутых параметров полета. Предпочтительно, упомянутые параметры полета содержат, по меньшей мере, некоторые из следующих параметров летательного аппарата:
- его массу;
- его скорость;
- высоту полета;
- температуру окружающей среды;
- его центрирование;
- расположение основного шасси;
- аэродинамическую конфигурацию;
- активацию системы кондиционирования воздуха;
- активацию противообледенительной системы;
- вероятный отказ двигателя.
Кроме того, преимущественно, по меньшей мере, для одного параметра полета используется предварительно определенное постоянное значение, чтобы сформировать упомянутую базу данных, тем самым давая возможность уменьшить размер базы данных. В этом случае, предпочтительно, в качестве предварительно определенного постоянного значения параметра полета применяется значение этого параметра полета, которое оказывает наиболее неблагоприятное воздействие на кривую летательного аппарата. В качестве примера, центрирование летательного аппарата может быть фиксировано на предельном значении смещения центра тяжести к носу самолета, которое имеет наибольшее отрицательное влияние.
В предпочтительном варианте осуществления для скорости применяется стабилизированная минимальная скорость, которая известна и с которой летательный аппарат обычно выполняет полет в ходе стандартной процедуры уклонения от столкновения с наземными препятствиями после оповещения о риске столкновений, т.е. постоянное значение, соответствующее связанному со скоростью значению безопасности для средств управления полетом летательного аппарата.
В варианте, применяемом к управлению полетом летательного аппарата на низкой высоте, предпочтительно для скорости, применяется предварительно определенное значение, соответствующее скорости по оптимальной кривой, а не минимальной скорости, как в предыдущем примере.
Дополнительно, чтобы сформировать упомянутую базу данных, в случае отказа двигателя кривая летательного аппарата выводится из минимальной кривой, представляющей работу в нормальном режиме (без отказов) всех двигателей летательного аппарата и к которой применяется вывод, зависящий от упомянутого номинального отказа. Предпочтительно, упомянутый вывод рассчитывается посредством полиномиальной функции, моделирующей упомянутую номинальную кривую (кривую летательного аппарата при всех работающих двигателях).
Настоящее изобретение также относится к устройству оповещения и предупреждения столкновения летательного аппарата с наземными препятствиями, в частности для транспортного самолета, причем упомянутое устройство имеет тип, содержащий:
- первое средство для изучения профиля наземных препятствий, по меньшей мере, впереди летательного аппарата;
- второе средство для определения траектории уклонения от столкновения;
- третье средство, соединенное с упомянутым первым и вторым средствами, для проверки, существует ли риск столкновения летательного аппарата с наземными препятствиями;
- четвертое средство для выдачи сигнала тревоги в случае обнаружения риска столкновения посредством упомянутого третьего средства.
Известно, что обычно упомянутое второе средство определяет траекторию уклонения от столкновения посредством вычисления кривой уклонения от столкновения при текущей скорости летательного аппарата, которая превышает минимальную скорость, с которой летательный аппарат обычно выполняет полет в ходе стандартной процедуры уклонения от столкновения с наземными препятствиями после оповещения о риске столкновений. Следовательно, эта кривая уклонения от столкновения отличается от кривой, которая фактически пролетается в ходе маневра. Этот режим расчетов может быть причиной ошибочных оповещений вследствие изначальной недооценки фактических летно-технических характеристик летательного аппарата.
В частности, чтобы устранить эти недостатки упомянутое устройство вышеупомянутого типа отличается согласно изобретению тем, что оно, кроме того, содержит, по меньшей мере, одну базу данных летно-технических характеристик летательного аппарата, связанных с кривой маневра уклонения от столкновения, пролетаемой летательным аппаратом, как функцию от конкретных параметров полета, и пятое средство для определения в ходе полета летательного аппарата фактических значений упомянутых конкретных параметров, причем упомянутое второе средство сформировано таким образом, чтобы определять упомянутую траекторию уклонения от столкновения как функцию от ориентиров, получаемых, соответственно, из упомянутой базы данных и от упомянутого пятого средства.
Следовательно, структура упомянутой базы данных учитывает способность к прогнозированию в отношении характеристик набора высоты летательного аппарата, с тем чтобы избежать столкновения с наземными препятствиями. Помимо этого, скорость на фазе уклонения от столкновения, предварительно определяемая (при минимальной скорости, как указано ниже) с тем, чтобы в дальнейшем предоставлять ассоциативно связанную кривую, не требует текущей скорости летательного аппарата (которая обязательно больше упомянутой минимальной скорости), что обеспечивает тем самым возможность стабилизировать кривую уклонения от столкновения, рассчитываемую устройством в соответствии с изобретением, и таким образом не допускать ложных сигналов тревоги.
В конкретном варианте осуществления устройство в соответствии с изобретением содержит множество таких баз данных, связанных, соответственно, с различными категориями летательного аппарата, и средство выбора для выбора из этих баз данных одной, которая соответствует летательному аппарату, на котором установлено упомянутое устройство, причем упомянутое второе средство использует сигналы из базы данных, соответственно, выбранные для того, чтобы определять упомянутую траекторию уклонения от столкновения.
Каждая из упомянутых категорий содержит:
- либо один тип летательного аппарата;
- либо набор типов летательных аппаратов, имеющих, например, практически эквивалентные характеристики и сгруппированные в одну и ту же категорию.
Прилагаемые чертежи иллюстрируют способ, которым может быть осуществлено изобретение. На этих чертежах идентичные ссылки обозначают подобные элементы.
Фиг. 1 и 2 - схематические представления двух различных вариантов осуществления устройства оповещения и предупреждения столкновения с наземными препятствиями в соответствии с изобретением.
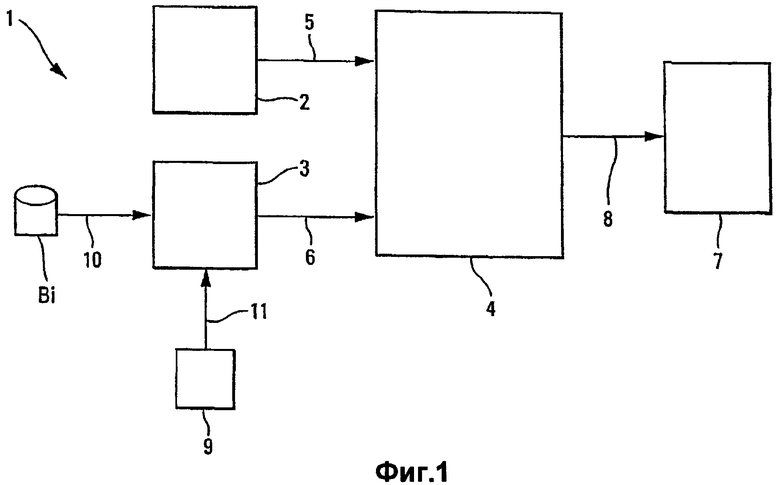
Устройство 1 в соответствии с изобретением, схематически представленное на Фиг. 1 и 2, предназначено для обнаружения любого риска столкновения летательного аппарата, в частности транспортного самолета, с окружающими наземными препятствиями и для предупреждения экипажа, когда этот риск обнаружен, с тем чтобы последний затем мог осуществить маневр уклонения от столкновения с наземными препятствиями.
Это устройство 1, например, типа TAWS (система оповещения и предупреждения столкновения с наземными препятствиями) или типа GPWS (система предупреждения опасного сближения с землей), которое находится на борту летательного аппарата, содержит в стандартной форме:
- средство 2, которое изучает профиль наземных препятствий, по меньшей мере, впереди летательного аппарата и которое для этой цели содержит, например, базу данных наземных препятствий и/или средство обнаружения наземных препятствий, такое как радар;
- средство 3 для определения траектории уклонения от столкновения;
- средство 4, которое соединено посредством линий 5 и 6 связи с упомянутыми средствами 2 и 3, для проверки в стандартной форме, существует ли риск столкновений летательного аппарата с наземными препятствиями, на основе ориентиров, передаваемых упомянутыми средствами 2 и 3;
- средство 7, которое соединено посредством линии 8 связи с упомянутым средством 4, для выдачи сигнала оповещения (звукового и/или визуального) в случае обнаружения риска столкновения посредством упомянутого средства 4.
Согласно изобретению:
- упомянутое устройство 1 дополнительно содержит:
- по меньшей мере, одну базу данных Bi, B1, B2, Bn характеристик летательного аппарата, причем эти характеристики связаны с кривой маневра уклонения от столкновения, пролетаемой летательным аппаратом, как функцию от конкретных параметров полета, как описано ниже;
- средство 9 для определения в ходе полета летательного аппарата фактических значений упомянутых конкретных параметров полета;
- упомянутое средство 3 соединено посредством линий 10 и 11 связи, соответственно, с упомянутой базой данных Bi, B1, B2, Bn и с упомянутым средством 9 и сформировано таким образом, чтобы определять упомянутую траекторию уклонения от столкновения как функцию от ориентиров, получаемых из упомянутой базы данных Bi, B1, B2, Bn и от упомянутого средства 9, как описано ниже.
Более того, согласно изобретению упомянутая база данных Bi, B1, B2, Bn формируется на земле в ходе предварительного этапа, перед полетом на воздушном судне, способом, описанным ниже.
В частности, чтобы сформировать упомянутую базу данных Bi, B1, B2, Bn определяется множество значений упомянутой кривой, представляющих, соответственно, множество различных значений в отношении упомянутых параметров полета. Эти параметры полета содержат параметры, связанные с характеристиками полета (скорость, масса и т.д.) летательного аппарата, параметры, связанные с системами (кондиционирования воздуха, противообледенительной и т.д.) летательного аппарата, и параметры, связанные с окружающей средой (температура) за пределами летательного аппарата. Предпочтительно, упомянутые параметры полета содержат, по меньшей мере, некоторые из следующих параметров, связанных с летательным аппаратом:
- массу летательного аппарата;
- скорость летательного аппарата;
- высоту полета летательного аппарата;
- температуру окружающей среды;
- центрирование летательного аппарата;
- позицию основного шасси летательного аппарата;
- аэродинамическую конфигурацию (т.е. позицию предкрылков и закрылков на крыльях в случае самолета);
- активацию (или неактивацию) стандартной системы кондиционирования воздуха летательного аппарата;
- активацию (или неактивацию) стандартной противообледенительной системы летательного аппарата;
- вероятный отказ двигателя летательного аппарата.
В конкретном варианте осуществления упомянутая кривая рассчитывается стандартным образом как функция от упомянутых параметров полета на основе стандартной документации по характеристикам летательного аппарата (например, руководства по летной эксплуатации), которые вытекают из моделей, перестроенных по результатам летных испытаний.
Более того, по меньшей мере, для одного из вышеупомянутых параметров полета используется предварительно определенное постоянное значение, чтобы сформировать упомянутую базу данных Bi, B1, B2, Bn, тем самым давая возможность уменьшить размер базы данных Bi, B1, B2, Bn. В этом случае, предпочтительно, в качестве предварительно определенного постоянного значения параметра полета применяется значение того параметра полета, который оказывает наиболее неблагоприятное воздействие на кривую летательного аппарата. В качестве примера, центрирование летательного аппарата может быть фиксировано на предельном значении смещения центра тяжести к носу самолета, которое имеет наибольшее отрицательное влияние, и конфигурации отбора воздуха (противообледенительная и кондиционирования воздуха) могут быть фиксированы таким образом, чтобы оставаться стабильными в отношении летно-технических характеристик летательного аппарата.
В предпочтительном варианте осуществления для скорости применяется постоянное значение, соответствующее связанному со скоростью значению безопасности для средств управления полетом летательного аппарата, т.е. минимальная скорость, с которой летательный аппарат обычно выполняет полет в ходе стандартного маневра уклонения от столкновения с наземными препятствиями после оповещения, например скорость Vαmax (скорость при максимальном угле атаки) или скорость VSW (типа сигнализации о приближении к сваливанию в штопор). Более конкретно, известно, что для летательного аппарата, диапазон полетных режимов которого защищен от сваливания посредством стандартных вычислительных машин, стандартный маневр уклонения от столкновения приводит к переходу летательного аппарата на кривую набора высоты, соответствующую минимальной скорости, которая поддерживается посредством этих вычислительных машин, так чтобы летательный аппарат не мог превысить угол атаки, соответствующий этой минимальной скорости. Следовательно, именно эта кривая набора высоты (стабилизированная) определяется изначально для всех вероятных режимов, задаваемых посредством конфигураций вышеупомянутых параметров полета (отличных от скорости), и затем моделируется таким образом, чтобы быть интегрированной в базу данных Bi, B1, B2, Bn.
Таким образом, в силу изобретения:
- структура базы данных Bi, B1, B2, Bn предоставляет способность к прогнозированию, поскольку скорость на фазе уклонения от столкновения определяется заранее, с тем чтобы впоследствии предоставить ассоциативно связанную кривую. Соответственно, она не требует текущей скорости летательного аппарата (которая обязательно больше упомянутой минимальной скорости), тем самым давая возможность стабилизировать кривую уклонения от столкновения, рассчитываемую устройством 1. Без этого моделирования устройство 1 должно рассчитывать кривую уклонения от столкновения при текущей скорости летательного аппарата, эта кривая уклонения от столкновения, следовательно, должна отличаться от кривой, фактически пролетаемой в ходе маневра (и в таком случае должна стремиться к этой последней кривой вместе со снижением летательного аппарата). Этот тип расчетов может приводить к ошибочным сигналам тревоги вследствие изначальной недооценки фактических характеристик летательного аппарата. Как следствие, вышеупомянутое моделирование в соответствии с изобретением дает возможность предоставлять кривую расчетов, которая является стабильной для устройства 1 (посредством интеграции скорости расчетов кривой), и, соответственно, избегать ложных оповещений;
- интеграция этого параметра (скорости) дает возможность существенно уменьшить размер базы данных Bi, B1, B2, Bn;
- база данных Bi, B1, B2, Bn создается на основе регулирующих инструкций (кривые на минимальной скорости являются сертифицированными данными), тем самым предоставляя возможность просто формулировать процесс генерирования данных, который соответствует стандарту DO-200A (и который, как следствие, оговаривается в отношении этого стандарта), гарантируя уровень целостности баз данных.
Помимо этого следует отметить, что дополнительное решение по настоящему изобретению заключается в моделировании максимальных кривых, пролетаемых при отказе(ах) двигателя, на основе кривой при всех работающих двигателях, и прибавлении (отрицательного) вывода кривой Δp, который моделируется посредством полиномиальной функции. Это моделирование позволяет значительно снизить размер памяти, предназначенной для принятия базы данных Bi, B1, B2, Bn (размер памяти, в принципе, уменьшается на коэффициент 2 или 3). Этот вывод кривой Δp может быть выражен в форме:
Δp=K1·PO+K2, где
- PO соответствует кривой при всех работающих двигателях;
- K1 и K2 представляют константы, которые применяются для всего семейства летательных аппаратов аналогичной геометрии.
Экстраполированное применение изобретения, описанного выше, может также быть рассмотрено для функции управления полетом летательного аппарата на низкой высоте. Основное отличие по сравнению с предыдущим описанием заключается в том факте, что моделируемые кривые более не моделируются для минимальных скоростей, а моделируются для кривых на конкретной скорости, которая указана далее (в режиме отказавшего двигателя). На этот раз цель моделирования заключается в том, чтобы сделать полет летательного аппарата безопасным (при полете на низкой высоте) при отказе двигателя. В отличие от вышеупомянутой процедуры уклонения от столкновения с наземными препятствиями процедура, применяемая в случае отказа двигателя (в ходе полета на низкой высоте), предназначена для приведения летательного аппарата к скорости на наилучшей кривой. Подразумевается, что выражение "скорость на наилучшей кривой" означает скорость, которая дает возможность достигать максимума высоты полета для максимального расстояния без отступления от диапазона скоростей полета. С другой стороны, вышеупомянутые принципы остаются неизменными, поскольку скорость на оптимальной кривой - это скорость, которая является предварительно определенной как функция, по меньшей мере, от некоторых из вышеупомянутых параметров полета (массы, абсолютной высоты полета и т.д.).
Следует отметить, что база данных характеристик Bi, B1, B2, Bn предоставляет возможность рассчитывать в реальном времени возможности летательного аппарата по уклонению от столкновения со всеми препятствиями, которые находятся впереди него и/или вдоль следуемого плана полета, посредством прохождения над ними. Таким образом, устройство 1 в соответствии с изобретением определяет траекторию уклонения от столкновения посредством учета фактических характеристик летательного аппарата на основании характеристик упомянутой базы данных Bi, B1, B2, Bn и на основании измерений упомянутых фактических значений. Следовательно, обнаружение риска столкновения с наземными препятствиями учитывает фактические характеристики летательного аппарата, тем самым обеспечивая возможность, в частности, избегать ложных сигналов тревоги и достигать управления высокой степени надежности.
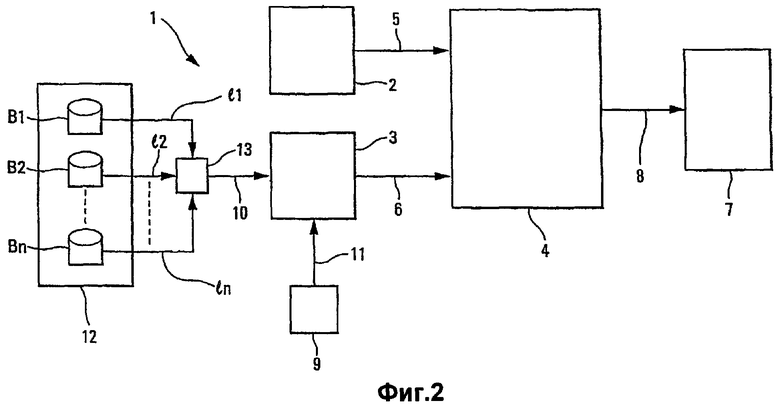
В конкретном варианте осуществления, представленном на Фиг. 2, устройство 1 в соответствии с изобретением содержит:
- набор 12 баз данных B1, B2,..., Bn, которые связаны, соответственно, с n различных категорий летательных аппаратов, причем n является целым числом больше 1;
- средство 13 выбора, которое связано посредством линий ℓ1, ℓ2,..., ℓn связи с упомянутыми базами B1, B2,..., Bn данных, соответственно, и которое предназначено для того, чтобы выбирать из баз B1, B2,..., Bn данных одну, которая связана с летательным аппаратом, на котором установлено упомянутое устройство 1. Упомянутое средство 3, которое соединено посредством линии 10 связи с упомянутым средством 13 выбора, использует исключительно сигналы из базы данных, выбранной посредством упомянутого средства 13 выбора, чтобы определить упомянутую траекторию уклонения от столкновения.
Каждая из упомянутых категорий летательного аппарата содержит либо один тип летательного аппарата (категория, которая соответствует типу), либо набор типов летательных аппаратов, имеющих, например, практически эквивалентные характеристики, и сгруппированные в одну и ту же категорию (каждая категория в таком случае содержит несколько типов).
Предпочтительно, выбор базы данных, характерной для летательного аппарата, который реализован посредством средств 13 выбора, выполняется посредством программирования контактов (т.е. клеммы разъема между летательным аппаратом и устройством 1 соответствуют уровням логики 0 или 1 в зависимости от категории судна). Это дает возможность иметь один тип оборудования (устройства 1) для всех летательных аппаратов различных рассматриваемых категорий (или типов), причем это оборудование, соответственно, само определяет категорию летательного аппарата, на котором оно установлено. Это программирование альтернативно может выполняться программным способом: средство 13 выбора принимает, например, посредством линии передачи данных цифровое значение, которое зависит от категории летательного аппарата, и оно выполняет выбор как функцию от принимаемого цифрового значения.
Группа изобретений относится к авиации. Для реализации предложенных способа и устройства применяется ряд средств. Первое средство предназначено для изучения профиля наземных препятствий, по меньшей мере, того, который находится впереди летательного аппарата. Второе средство служит для определения траектории уклонения от столкновения. Третье средство, которое соединено с первым и вторым средствами, используется для проверки, существует ли риск столкновения летательного аппарата с наземными препятствиями. Четвертое средство обеспечивает выдачу сигнала тревоги в случае обнаружения риска столкновения посредством третьего средства. Предусмотрена, по меньшей мере, одна база данных летно-технических характеристик летательного аппарата, связанных с градиентом маневрирования для уклонения от столкновений, который может быть пройден в полете летательным аппаратом согласно конкретным параметрам полета. Пятое средство определяет фактические значения конкретных параметров в ходе полета летательного аппарата. Третье средство сформировано таким образом, что есть возможность определять траекторию уклонения от столкновения согласно информации, получаемой из базы данных и от пятого средства. Группа изобретений позволяет исключить слишком позднее обнаружение риска столкновения и ложные сигналы тревоги. 4 н. и 7 з.п. ф-лы, 2 ил.
1. Способ предупреждения столкновения летательного аппарата с
наземными препятствиями, в котором:
I) на предварительном этапе формируют, по меньшей мере, одну базу данных (Bi, B1, B2, Вn) характеристик летательного аппарата, причем эти характеристики связаны с кривой маневра уклонения от столкновения, пролетаемой летательным аппаратом, как функцией от конкретных параметров полета, и, чтобы сформировать эту базу данных (Bi, B1, B2, Вn), определяют множество значений упомянутой кривой, характерных для каждого проявления различных значений в отношении упомянутых параметров полета, и
II) в ходе дальнейшего полета летательного аппарата:
a) определяют фактические значения упомянутых конкретных параметров полета;
b) определяют траекторию уклонения от столкновения на основе этих фактических значений упомянутых конкретных параметров полета и упомянутой базы данных (Bi, B1, B2, Вn),
c) определяют профиль наземных препятствий, находящихся, по меньшей мере, впереди летательного аппарата,
d) с помощью упомянутой траектории уклонения от столкновения и профиля наземных препятствий, находящихся, по меньшей мере, впереди летательного аппарата, выполняют проверку, чтобы удостовериться, есть ли риск столкновения с упомянутыми наземными препятствиями для упомянутого летательного аппарата, и,
e) в случае риска столкновения, выдают соответствующий сигнал тревоги, в котором в случае отказа двигателя кривую уклонения летательного аппарата выводят из номинальной кривой, представляющей работу в нормальном режиме всех двигателей летательного аппарата и к которой применяют вывод, зависящий от упомянутого номинального отказа.
2. Способ по п.1, в котором упомянутые параметры полета содержат, по меньшей мере, некоторые из следующих параметров летательного аппарата:
его массу,
его скорость,
высоту полета,
температуру окружающей среды,
его центрирование,
позицию основного шасси,
аэродинамическую конфигурацию,
активацию системы кондиционирования воздуха,
активацию противообледенительной системы и
вероятный отказ двигателя.
3. Способ по п.1, в котором, по меньшей мере, для одного параметра полета предварительно определенное постоянное значение используется для формирования упомянутой базы данных (Bi, B1, B2, Вn).
4. Способ по п.3, в котором в качестве предварительно определенного постоянного значения параметра полета применяют значение этого параметра полета, которое оказывает наиболее неблагоприятное воздействие на кривую летательного аппарата.
5. Способ по п.2, в котором для скорости применяют предварительно определенное значение, соответствующее стабилизированной минимальной скорости, с которой летательный аппарат обычно выполняет полет в ходе стандартной процедуры уклонения от столкновения с наземными препятствиями.
6. Способ по п.2, в котором для скорости применяют предварительно определенное значение, соответствующее скорости на наилучшей кривой.
7. Способ по п.1, в котором упомянутый вывод рассчитывают посредством полиномиальной функции упомянутой номинальной кривой.
8. Устройство оповещения и предупреждения столкновения летательного аппарата с наземными препятствиями, причем упомянутое устройство (1) содержит:
первое средство (2) для изучения профиля наземных препятствий, по меньшей мере, впереди летательного аппарата,
второе средство (3) для определения траектории уклонения от столкновения,
третье средство (4), соединенное с упомянутыми первым и вторым средствами (2, 3), для проверки, существует ли риск столкновения с наземными препятствиями для летательного аппарата, и
четвертое средство (7) для выдачи сигнала тревоги в случае обнаружения риска столкновения посредством упомянутого третьего средства (4), при этом оно, кроме того, содержит, по меньшей мере, одну базу данных (Bi, B1, B2, Вn) характеристик летательного аппарата, связанных с кривой маневра уклонения от столкновения, пролетаемой летательным аппаратом, как функцией от конкретных параметров полета, причем упомянутая база данных (Bi, B1, B2, Вn) содержит множество значений для упомянутой кривой, которые являются характерными для каждого проявления различных значений в отношении упомянутых параметров полета, и пятое средство (9) для определения в ходе полета летательного аппарата фактических значений упомянутых конкретных параметров, а упомянутое второе средство (3) сформировано таким образом, чтобы определять упомянутую траекторию уклонения от столкновения как функцию от ориентиров, получаемых соответственно из упомянутой базы данных (Bi, В1, B2, Вn) и от упомянутого пятого средства (9), при этом в случае отказа двигателя кривую летательного аппарата выводят из номинальной кривой, представляющей работу в нормальном режиме всех двигателей летательного аппарата и к которой применяют вывод, зависящий от упомянутого номинального отказа.
9. Устройство по п. 8, при этом оно содержит множество баз данных (Bi, B1, В2, Вn), связанных соответственно с различными категориями летательного аппарата, и средство выбора (13) для выбора из этих баз данных (Bi, B1, B2, Вn) одной, которая относится к летательному аппарату, на котором установлено упомянутое устройство (1), причем упомянутое второе средство (3) использует ориентиры из базы данных (Bi, B1, B2, Вn) соответственно, выбранные для определения упомянутой траектории уклонения от столкновения.
10. Летательный аппарат, содержащий устройство (1), позволяющее реализовать способ по п.1.
11. Летательный аппарат, содержащий устройство (1), такое, как определено по п.8.
| Установка для химико-термической обработки тлеющим разрядом | 1977 |
|
SU750238A1 |
| US 6163744 A, 19.12.2000 | |||
| Устройство для транспортирования и передачи изделий с одного конвейера на другой,расположенных под углом друг к другу | 1986 |
|
SU1318492A2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |

