Настоящее изобретение относится к способу и устройству для определения ширины коридора безопасного маневрирования, который задается по каждую сторону латеральной траектории для траектории полета летательного аппарата, а также к способу и системе для обеспечения безопасности полета на малой высоте летательного аппарата, который автоматически проводится по такой траектории полета.
В частности, хотя и не исключительно, настоящее изобретение относится к военно-транспортному самолету, который характеризуется низкой тяговооруженностью и большой инерцией, и у которого время выполнения маневров обычно являются достаточно продолжительными.
В целях настоящего изобретения, под выражением полет на малой высоте понимается полет по траектории полета (на малой высоте), позволяющей летательному аппарату как можно ближе следовать пролетаемой местности, в частности, чтобы избежать обнаружения. Поэтому траектория полета на малой высоте, типа упомянутой траектории, обычно расположена на минимальной из заданных высот над местностью, например 500 футов (около 150 метров).
Из-за такой близости к земле, любой боковое или направленное вертикально вниз отклонение (сверх некоторого допустимого предела безопасности) летательного аппарата от траектории полета, которой надлежит следовать, во время ведения летательного аппарата по упомянутой траектории полета создает значительный риск столкновения с пролетаемой местностью (непосредственно с землей или со строением или объектом, расположенным на земле). Разумеется, наличие данного риска неприемлемо.
Целью настоящего изобретения является обеспечение безопасности полета на малой высоте летательного аппарата (который ведется автоматически по траектории полета, содержащей латеральную траекторию и вертикальную траекторию) с использованием коридора безопасного маневрирования таким образом, чтобы сделать маловероятным любое столкновение летательного аппарата с пролетаемой местностью.
Настоящее изобретение относится, в частности, к автоматическому полету, который является автономным, то есть автоматическому полету, который выполняется только посредством бортовых систем навигации, управления полетом и контроля и цифровой базы данных местности без помощи какого-либо активного устройства переднего обзора, например радара. Известно, что автономный автоматический полет, например, описанного типа подвержен ряду ошибок, связанных, в частности с:
- навигацией: координаты, выдаваемые бортовой системой навигации не являются точными координатами летательного аппарата;
- управлением: автопилот согласует координаты, выдаваемые системой навигации, с траекторией, вычисленной системой управления полетом. Такое согласование обладает собственной характеристикой, которая выражает способность автопилота проводить летательный аппарат по требуемой траектории. Ошибка управления может также существовать во время полета с поддержкой пилотажного командного прибора, которому пилот должен следовать вручную;
- траекторией полета: точность данной траектории зависит от точности алгоритма и от процессора используемого компьютера, а также, главным образом, смотря по обстоятельствам, от ошибки цифрового моделирования пролетаемой местности.
Чтобы ограничить до вероятности появления, которая является целевой, любой риск (катастрофического) столкновения с окружающей местностью из-за латерального отклонения траектории, обусловленного, в частности, по меньшей мере, одной из вышеописанных ошибок, определяют коридор безопасного маневрирования, имеющий достаточную конкретную ширину, с каждой стороны от упомянутой траектории полета.
Таким образом, настоящее изобретение относится к способу определения ширины такого коридора безопасного маневрирования, который определяется с каждой стороны латеральной траектории для траектории полета летательного аппарата.
С этой целью, упомянутый способ предусматривает, что:
a) оценивается множество ошибок, каждая из которых влияет на автоматический (или автономный) полет на малой высоте летательного аппарата;
b) определяется вероятность выхода из коридора безопасного маневрирования, выход из которого не допускается; и
с) на основании упомянутых ошибок и упомянутой вероятности выхода, определяется ширина упомянутого коридора безопасного маневрирования с учетом, по меньшей мере, одного математического выражения, устанавливающего взаимосвязь между, по меньшей мере, упомянутыми ошибками, упомянутой вероятностью выхода и упомянутой ширины.
Таким образом, на основании изобретения можно определять коридор безопасного маневрирования, в котором учтены ошибки, которые указанным образом могут влиять на автономное, автоматическое пилотирование.
На этапе а) преимущественно учитываются, по меньшей мере, некоторые из следующих ошибок:
- навигационная ошибка;
- ошибка управления;
- погрешность траектории полета.
Кроме того, упомянутые ошибки преимущественно оцениваются в форме плотностей вероятностей. Упомянутые плотности вероятностей предпочтительно удовлетворяют одному из следующих законов:
- закону экспоненциального распределения;
- закону распределения Лапласа-Гаусса;
- закону распределения Пуассона;
- закону полиномиального распределения.
Кроме того, в предпочтительном варианте, упомянутая вероятность выхода равна 10-8/hdv, где hdv обозначает час полета летательного аппарата.
В случае двух разных ошибок, которые являются независимыми в вероятностном отношении, упомянутое математическое выражение предпочтительно представляет собой:

где
Р - обозначает упомянутую вероятность выхода;
d - обозначает половину упомянутой ширины коридора безопасного маневрирования;
f1 - обозначает плотность вероятности, относящуюся к первой из упомянутых ошибок; и
f2 - обозначает плотность вероятности, относящуюся ко второй ошибке.
Кроме того, в предпочтительном варианте, в случае трех разных ошибок с соответствующими отдельными плотностями fi вероятности, также применяется упомянутое математическое выражение (1), позволяющее вычислять Р в виде функции двух (глобальных) плотностей f1 и f2 вероятности, где f1 соответствует плотности вероятности, возникающей из суммы двух ошибок с отдельными плотностями fi вероятности, и f2 соответствует отдельной плотности fi вероятности третьей оставшейся ошибки.
Кроме того, когда упомянутые ошибки выражаются в форме закона распределения Лапласа-Гаусса, в предпочтительном варианте ширина коридора безопасного маневрирования соответствует удвоенному среднеквадратическому значению пределов упомянутых ошибок, экстраполированных для целевого значения упомянутой вероятности выхода. В данном случае, упомянутое математическое выражение предпочтительно имеет вид:
где
d - обозначает половину упомянутой ширины коридора безопасного маневрирования;
L(p) - является коэффициентом разложения, который зависит от вероятности р появления ошибки; и
σi - означает среднеквадратическое отклонение распределения Гаусса для ошибки  .
.
Следует отметить, что, если известен предел ошибки для вероятности  , то закон распределения Лапласа-Гаусса дает возможность выводить среднеквадратическое отклонение σ из распределения ошибок. В настоящем случае, закон распределения Лапласа-Гаусса полностью определяется парой (µ, σ), где µ является средним значением ошибки, которое равно нулю, поскольку ошибки имеют одинаковую вероятность возникновения справа или слева. Предел данной ошибки (соответствующий некоторой вероятности отклонения от среднего) получают из выражения L(p)σ. Закон распределения Лапласа-Гаусса дает возможность определить коэффициент L(p) для
, то закон распределения Лапласа-Гаусса дает возможность выводить среднеквадратическое отклонение σ из распределения ошибок. В настоящем случае, закон распределения Лапласа-Гаусса полностью определяется парой (µ, σ), где µ является средним значением ошибки, которое равно нулю, поскольку ошибки имеют одинаковую вероятность возникновения справа или слева. Предел данной ошибки (соответствующий некоторой вероятности отклонения от среднего) получают из выражения L(p)σ. Закон распределения Лапласа-Гаусса дает возможность определить коэффициент L(p) для  в пределах интервала [0, 1]. Как правило, пределы ошибок навигации, управления или траектории известны до 95%, что дает возможность определить среднеквадратическое отклонение σ и, следовательно, пределы ошибок для любой другой вероятности.
в пределах интервала [0, 1]. Как правило, пределы ошибок навигации, управления или траектории известны до 95%, что дает возможность определить среднеквадратическое отклонение σ и, следовательно, пределы ошибок для любой другой вероятности.
Кроме того, к упомянутой ширине предпочтительно добавляют допуск на размах крыла летательного аппарата.
В конкретном варианте осуществления учитывается, по меньшей мере, одна ошибка, которая обусловлена сбоем, по меньшей мере, одной системы (органов управления полетом, двигателя и т.п.) летательного аппарата, например, таким сбоем, который может вызывать дополнительное поперечное отклонение. Данный сбой возникает с некоторой вероятностью.
Настоящее изобретение относится также к способу обеспечения безопасности полета на малой высоте летательного аппарата, который проводится по траектории полета, содержащей латеральную траекторию и вертикальную траекторию.
В соответствии с изобретением упомянутый способ отличается тем, что:
- определяется ширина коридора безопасного маневрирования выполнением вышеописанного способа;
- определяется коридор безопасного маневрирования, свободный от любых препятствий, который имеет упомянутую ширину, и который ограничен с каждой стороны упомянутой латеральной траектории; и
- летательный аппарат автоматически проводится по упомянутой траектории полета.
Таким образом, когда коридор безопасного маневрирования свободен от любых препятствий с целевой вероятностью, в частности, в любой части местности, например, у горной вершины, риск столкновения летательного аппарата во время полета на малой высоте по упомянутой траектории полета доводится до минимума, пока летательный аппарат остается в данном коридоре безопасного маневрирования, и очевидно, что вышеописанный результат (с некоторой вероятностью, которую можно довести до минимума) обусловлен вышеописанным способом определения упомянутого коридора безопасного маневрирования, который имеет достаточную ширину, в частности, когда возникают ошибки вышеописанного типа.
Настоящее изобретение относится также к устройству для определения ширины коридора безопасного маневрирования, который определяется с каждой стороны латеральной траектории для траектории полета летательного аппарата.
В соответствии с изобретением данное устройство содержит:
- средство, предоставляющее возможность вводить (в упомянутое устройство) множество ошибок, каждая из которых влияет на автоматический (и автономный) полет на малой высоте летательного аппарата;
- средство для определения вероятности выхода из коридора безопасного маневрирования, выход из которого не допускается; и
- средство для определения ширины упомянутого коридора безопасного маневрирования на основании упомянутых ошибок и упомянутой вероятности выхода, с учетом, по меньшей мере, одного математического выражения, устанавливающего взаимосвязь между, по меньшей мере, упомянутыми ошибками, упомянутой вероятностью выхода и упомянутой шириной.
Кроме того, настоящее изобретение относится к системе для обеспечения безопасности полета на малой высоте летательного аппарата, при этом система содержит:
- первое средство для определения траектории полета, содержащей латеральную траекторию и вертикальную траекторию; и
- средство управления для автоматического проведения летательного аппарата по упомянутой траектории полета, содержащее также навигационное средство.
В соответствии с изобретением данная система обеспечения безопасности далее содержит:
- устройство, например вышеописанное устройство, для определения ширины коридора безопасного маневрирования; и
- второе средство для определения коридора безопасного маневрирования, свободного от любых препятствий, который имеет упомянутую ширину, определенную упомянутым устройством, и который ограничен с каждой стороны упомянутой латеральной траектории.
Благодаря формированию упомянутого коридора безопасного маневрирования, ширина которого учитывает ошибки, возникающие во время полета, система обеспечения безопасности способна сводить к минимуму риск столкновения летательного аппарата с местностью. Поэтому безопасность автоматического полета летательного аппарата на малой высоте обеспечивается, в частности, по меньшей мере, в отношении латеральных отклонений.
Фигуры на прилагаемых чертежах объясняют, как можно осуществить изобретение. На данных чертежах одинаковые позиции обозначают одинаковые элементы.
Фиг.1 - принципиальная схема устройства в соответствии с изобретением.
Фиг.2 - схематичное изображение в вертикальной 'плоскости характеристик коридора безопасного маневрирования.
Фиг.3 - принципиальная схема системы обеспечения безопасности в соответствии с изобретением.
Устройство 1 в соответствии с изобретением, схематично представленное на фиг.1, предназначено для определения ширины D коридора CS безопасного маневрирования, который задается с каждой стороны латеральной траектории TL в траектории ТО полета летательного аппарата А, выполняющего полет на малой высоте, в частности военно-транспортного самолета.
В соответствии с изобретением упомянутое устройство 1 содержит
- средство 3, предоставляющее возможность вводить в устройство 1 множество нижеописанных ошибок, каждая из которых влияет на автоматический (и автономный, то есть выполняемый без применения какого-либо активного устройства, например радара) полет летательного аппарата А на малой высоте;
- средство 4 для определения вероятности выхода из коридора CS безопасного маневрирования, выход из которого не допускается; и
- средство 5, соединенное соответственно линиями связи 6 и 7 с упомянутыми средствами 3 и 4, для определения ширины D упомянутого коридора CS безопасного маневрирования на основании упомянутых ошибок и упомянутой вероятности выхода, с учетом, по меньшей мере, одного математического выражения, устанавливающего взаимосвязь между, по меньшей мере, упомянутыми ошибками, упомянутой вероятностью выхода и упомянутой шириной D.
В предпочтительном варианте осуществления устройство 1 может учитывать, по меньшей мере, некоторые из следующих ошибок (вводимых с помощью средства 3):
- навигационную ошибку, которая учитывает тот факт, что координаты, выдаваемые бортовой системой навигации не являются точными фактическими координатами летательного аппарата А;
- ошибку управления, которая учитывает тот факт, что автопилот (или пилотажный командный прибор и пилот, в случае полета по пилотажному командному прибору) согласует координаты, выдаваемые системой навигации, с траекторией, вычисленной системой управления полетом. Такое согласование обладает собственной характеристикой, которая выражает способность автопилота проводить летательный аппарат А по требуемой траектории (или способность пилотажного командного прибора и способность пилота следовать ему); и
- погрешность траектории полета, которая учитывает тот факт, что точность траектории ТО полета зависит от точности алгоритма и процессора стандартного компьютера, который определяет данную траекторию ТО полета, а также от ошибки (преобладающей) цифрового моделирования пролетаемой местности 2, моделирование которой используется с данной целью компьютером.
Кроме того, в предпочтительном варианте:
- навигационная ошибка с целевой вероятностью вычисляется в реальном времени бортовой системой навигации;
- ошибка базы данных местности содержится, как правило, в базе данных или задается по умолчанию на летательном аппарате; и
- ошибка управления задается по умолчанию раз и навсегда на летательном аппарате.
Вышеупомянутые используемые ошибки предварительно оцениваются в форме плотностей вероятностей поставщиками соответствующих систем (навигации, управления и т.п.) летательного аппарата А и затем вводятся с помощью средства 3 для передачи в упомянутое средство 5. В предпочтительном варианте, но не исключительно, упомянутые плотности вероятностей удовлетворяют, по меньшей мере, одному из следующих законов:
- закону экспоненциального распределения;
- закону распределения Лапласа-Гаусса;
- закону распределения Пуассона;
- закону полиномиального распределения.
В предпочтительном варианте упомянутое средство 4 использует в качестве вероятности выхода величину 10-8/hdv, где hdv обозначает час полета летательного аппарата А, то есть, что тогда летательный аппарат А характеризуется вероятностью 10-8 риска отклонения от (или выхода из) коридора CS безопасного маневрирования в час полета, обусловленного боковым расхождением между реальными координатами летательного аппарата А и искомой траекторией.
В предпочтительном варианте осуществления, в случае учета двух разных ошибок, упомянутое средство 5 использует математическое выражение:

где
Р - обозначает упомянутую вероятность выхода;
d - обозначает половину упомянутой ширины D коридора CS безопасного маневрирования;
f1 - обозначает плотность вероятности, относящуюся к первой из упомянутых двух ошибок; и
f2 - обозначает плотность вероятности, относящуюся ко второй ошибке.
В общем смысле, в случае трех разных ошибок с соответствующими отдельными плотностями fi вероятности, упомянутое средство 5 также использует вышеупомянутое математическое выражение (1), позволяющее вычислять Р в виде функции двух плотностей f1 и f2 вероятности (которые в данном случае являются глобальными), где f1 соответствует плотности вероятности, возникающей из суммы двух ошибок с отдельными плотностями fi вероятности, и f2 соответствует отдельной плотности fi вероятности третьей оставшейся ошибки.
Точнее, в вышеупомянутом выражении (I):

«y» может представлять собой сумму двух ошибок х1+х2.
Р можно записать в виде 
где f означает плотность вероятности случайной переменной y=х1+х2, то для суммы трех ошибок х1+х2+х3=y+х3 получают

где 
Поэтому устройство 1 в соответствии с изобретением вычисляет ширину D коридора CS безопасного маневрирования, которая обеспечивает возможность выдерживать целевое значение вероятности отклонения из данного коридора CS безопасного маневрирования, выход из которого не допускается, путем учета различных ошибок, которые влияют на безопасность автоматического полета на малой высоте.
В конкретном варианте осуществления, для которого упомянутые ошибки задаются в соответствии с распределением Гаусса, то есть выражаются в форме стандартного закона распределения Лапласа-Гаусса, ширина D коридора CS безопасного маневрирования соответствует удвоенному среднеквадратическому значению пределов упомянутых ошибок, экстраполированных для целевого значения упомянутой вероятности выхода.
В данном случае, упомянутое средство 5 использует упомянутое следующее математическое выражение:
где
d - обозначает половину упомянутой ширины D коридора безопасного маневрирования;
L(p) - является коэффициентом заданной ширины для целевого значения вероятности p/hdv, полностью и однозначно задаваемым законом распределения Гаусса [достоверным независимо от распределения Гаусса, определяемым величинами (ξ, σ)];
i - обозначает учитываемые ошибки, которые считаются нормальными и попарно независимыми; и
σ - является среднеквадратическим отклонением распределения Гаусса для ошибки i.
В нижеследующей таблице показан характер изменения предела L (или коэффициента ширины) ошибки в виде функции целевого значения вероятности. Таблица 1 составлена для распределения ошибки с σ=1 метр и µ=0 метров (симметричное распределение относительно TL).
Таблица 1
Среднеквадратическое отклонение σ выбрано равным 1 метру для ясности. Из вышеприведенной таблицы можно сделать вывод, что для распределения Гаусса, для которого µ=0 метров и σ=1 метр:
- вероятность, что ошибка больше, чем предел ±0,67 метра, равна 0,5 (то есть вероятность выхода за данный предел составляет 50%);
- вероятность, что ошибка больше, чем предел ±1,96 метра, равна 0,05 (5%);
- вероятность, что ошибка больше, чем предел ±2 метра, равна 0,0455 (4,55%);
- вероятность, что ошибка больше, чем предел ±4,89 метров, равна 10-5;
- вероятность, что ошибка больше, чем предел ±5,32 метров, равна 10-6;
- вероятность, что ошибка больше, чем предел ±5,73 метров, равна 10-7;
- вероятность, что ошибка больше, чем предел ±6,11 метров, равна 10-9.
Следует заметить для примера, что ширина коридора, соответствующего вероятности 10-9/hdv, должна быть в 3,12 раза больше (6,110/1,960=3,12), чем ширина коридора, соответствующего вероятности 5·10-2/hdv.
Другая представляющая интерес особенность настоящего распределения заключается в том, что вероятность выхода из коридора CS безопасного маневрирования с размерами [-L; +L] при законе распределения Гаусса со среднеквадратическим отклонением σ, равным 1 метру, заданным в вышеприведенной таблице, равна вероятности выхода из коридора, который в  раз шире [-pL; +pL] при законе распределения Гаусса со среднеквадратическим отклонением σ, равным
раз шире [-pL; +pL] при законе распределения Гаусса со среднеквадратическим отклонением σ, равным  метрам.
метрам.
Если предположить, что навигационная ошибка или ошибка управления является гауссовой по своему характеру, и что такая ошибка характеризуется некоторым пределом с некоторой вероятностью, то:
- во-первых, распределение в целом данной ошибки определяется вычислением среднеквадратического отклонения σ, равного метрам (среднее µ ошибки равно нулю, так как существует одинаковая возможность возникновения навигационной ошибки или ошибки управления с одной или другой стороны траектории); и
- затем вероятность выхода из коридора [- pL; +pL] можно вывести непосредственно из результата упомянутого вычисления заменой L на pL в вышеприведенной таблице 1 (чтобы получить следующую таблицу 2).
Таблица 2
Следовательно, если известен предел ошибки для некоторой вероятности, то предел данной ошибки для другой вероятности выводится умножением первого на отношение соответствующих коэффициентов «L» ширины.
Таким образом, благодаря настоящему изобретению, достаточно:
- оценить элементарные ошибки (навигационную, управления, базы данных, местности и т.п.), что дает возможность, в случае ошибок с распределением Гаусса, определить стандартное отклонение σ каждой ошибки [и, иначе, определить плотности вероятности fi вышеупомянутого математического выражения (1)];
- задать необходимый уровень безопасности в форме вероятности выхода из коридора CS безопасного маневрирования, выход из которого не допускается (задаваемый, например, контрактом между изготовителем летательного аппарата А и заказчиком); и
- вывести из него ширину D коридора CS безопасного маневрирования вышеупомянутым образом.
Независимо от используемого варианта осуществления, к упомянутой ширине D предпочтительно прибавляют допуск, учитывающий размах крыла летательного аппарата А.
До сих пор рассматривалось отклонение летательного аппарата А, которое обусловлено только собственными характеристиками систем навигации и управления, а также точностью базы данных местности, без учета какого-либо сбоя системы (органов управления полетом, двигателя и т.п.) летательного аппарата А, который может внести дополнительное отклонение.
В конкретном варианте осуществления для учета дополнительного отклонения, например обусловленного сбоем системы, устройство 1 в соответствии с изобретением учитывает, по меньшей мере, одну ошибку, которая обусловлена сбоем, по меньшей мере, одной системы летательного аппарата.
Предполагается, что  может возникать с вероятностью в час полета, равной Pj, и что данный сбой вызывает дополнительное боковое отклонение ±dj (дискретное отклонение) вправо или влево с одинаковой вероятностью (т.е. Pj/2 для каждой стороны). Данное боковое отклонение предполагается всегда одним и тем же, когда возникает сбой.
может возникать с вероятностью в час полета, равной Pj, и что данный сбой вызывает дополнительное боковое отклонение ±dj (дискретное отклонение) вправо или влево с одинаковой вероятностью (т.е. Pj/2 для каждой стороны). Данное боковое отклонение предполагается всегда одним и тем же, когда возникает сбой.
Таким образом, вероятность Р, что суммарное отклонение летательного аппарата А (отклонение, обусловленное внутренними характеристиками систем летательного аппарата, представленное значением TSE, плюс отклонение, обусловленное сбоем системы) меньше, чем  по абсолютной величине, равно сумме следующих вероятностей:
по абсолютной величине, равно сумме следующих вероятностей:
- вероятности, что сбой  системы возникнет и вызовет отклонение dj вправо, и что (TSE+dj) ε [-d, d], т.е. TSE ε [-d-dj; d-dj];
системы возникнет и вызовет отклонение dj вправо, и что (TSE+dj) ε [-d, d], т.е. TSE ε [-d-dj; d-dj];
- вероятности, что сбой  системы возникнет и вызовет отклонение dj влево, и что (TSE-dj) ε [-d, d], т.е. TSE ε [-d+dj; d+dj]; и
системы возникнет и вызовет отклонение dj влево, и что (TSE-dj) ε [-d, d], т.е. TSE ε [-d+dj; d+dj]; и
- вероятности, что сбой j системы отсутствует, но что TSE меньше, чем  по абсолютной величине.
по абсолютной величине.
Следует отметить, что переменная TSE («суммарная системная ошибка») соответствует сумме ошибок навигации, управления и траектории.
Таким образом, имеет место:

где f означает плотность вероятности случайной переменной TSE


Рассуждения можно распространить на случай двух одновременных сбоев  и
и  с вероятностями Pi и Pj, которые вызывают отклонения ±di и ±dj соответственно.
с вероятностями Pi и Pj, которые вызывают отклонения ±di и ±dj соответственно.
Вероятность Р, что суммарное отклонение летательного аппарата А меньше, чем  по абсолютной величине, равна сумме следующих вероятностей:
по абсолютной величине, равна сумме следующих вероятностей:
- вероятности, что сбои  и
и  системы возникнут одновременно, и что (TSE±di±dj) ε [-d; d] (± как функция направления отклонения, вызванного каждым сбоем системы, равновероятны для каждого случая);
системы возникнут одновременно, и что (TSE±di±dj) ε [-d; d] (± как функция направления отклонения, вызванного каждым сбоем системы, равновероятны для каждого случая);
- вероятности, что сбой i системы имеет место, тогда как сбой системы отсутствует, но что (TSE±di) ε [-d; d] (± как функция направления отклонения, вызванного сбоем системы  );
);
- вероятности, что сбой  системы имеет место, тогда как сбой i системы отсутствует, но что (TSE±dj) ε [-d; d] (± как функция направления отклонения, вызванного сбоем системы ); и
системы имеет место, тогда как сбой i системы отсутствует, но что (TSE±dj) ε [-d; d] (± как функция направления отклонения, вызванного сбоем системы ); и
- вероятности, что сбои  и
и  системы отсутствуют, но что TSE меньше, чем
системы отсутствуют, но что TSE меньше, чем  по абсолютной величине.
по абсолютной величине.
Поэтому, получается выражение:
 Ширина D (D=2d) коридора CS безопасного маневрирования, найденная вышеописанным образом устройством 1, может быть использована системой 9 для обеспечения безопасности (автоматического и автономного) полета на малой высоте летательного аппарата А в соответствии с изобретением, как схематично представлено на фиг.3.
Ширина D (D=2d) коридора CS безопасного маневрирования, найденная вышеописанным образом устройством 1, может быть использована системой 9 для обеспечения безопасности (автоматического и автономного) полета на малой высоте летательного аппарата А в соответствии с изобретением, как схематично представлено на фиг.3.
Упомянутая система 9, которая в связи с изложенным предназначена для выполнения автоматического и автономного полета на малой высоте летательного аппарата А, относится к типу систем, содержащих:
- стандартное средство 10, например систему управления полетом, для определения стандартным способом траектории ТО полета, содержащей горизонтальную траекторию TL, заданную в латеральной плоскости, и вертикальную траекторию (или профиль полета), заданную в вертикальной плоскости. Чтобы обеспечить возможность полета на малой высоте, траектория ТО полета (на малой высоте) должна позволять летательному аппарату А как можно точнее следовать пролетаемой местности 2; и
- стандартное средство 11 управления и навигации для автоматического управления летательного аппарата А по упомянутой траектории ТО полета. В предпочтительно варианте осуществления, упомянутое средство 11 управления содержит:
- средство 12, например автопилот, которое соединено линией 13 связи с упомянутым средством 10 для определения команд такого пилотирования летательного аппарата А, чтобы он следовал упомянутой траектории ТО полета; и
- средство 14 приведения в действие управляемых элементов 15, например, рулей, рулей высоты и т.п. летательного аппарата А, которое соединено линией 16 связи с упомянутым средством 12, и в которое автоматически подаются команды пилотирования, определяемые последним.
Упомянутое средство 11 управления может также содержать пилотажный командный прибор.
Для обеспечения безопасности полета на малой высоте, упомянутая система 9 дополнительно содержит:
- устройство 1, например, устройство, описанное выше, для определения ширины D коридора CS безопасного маневрирования; и
- средство 17, которое соединено линией 8 связи с упомянутым устройством 1 и линией 18 связи с упомянутым устройством 12, для определения коридора CS безопасного маневрирования:
- который свободен от любых препятствий;
- который имеет упомянутую ширину D, определенную упомянутым устройством 1; и
- который задан с каждой стороны упомянутой горизонтальной траектории TL, и который выровнен по последней как по центральной линии, как показано на фиг.2.
Таким образом, когда коридор CS безопасного маневрирования свободен по определению от любого препятствия, в частности от любой части 2 местности, например, типа горной вершины 21, риск столкновения летательного аппарата А во время автоматического полета на малой высоте по упомянутой траектории ТО полета сводится к минимуму, пока упомянутый летательный аппарат А выдерживается в пределах данного коридора CS безопасного маневрирования. Сейчас упомянутый летательный аппарат А выдерживается постоянно в упомянутом коридоре CS безопасного маневрирования благодаря работе упомянутого автоматического средства 11 управления и тому факту, что упомянутый коридор CS безопасного маневрирования учитывает по определению ошибки, имеющие тенденцию возникать во время автоматического полета рассматриваемого типа (который выполняется упомянутым автоматическим средством 11 управления).
В латеральной плоскости, в связи с этим, коридор CS безопасного маневрирования выровнен по траектории TL как по центральной линии и ограничен с каждой стороны расстоянием d, представляющим половину упомянутой ширины D.
Следует также отметить, что, хотя это непосредственно не составляет части предмета настоящего изобретения, в вертикальной плоскости упомянутый коридор CS безопасного маневрирования не ограничен сверху, но ограничен снизу наиболее высокой частью 21 местности 2 (рельеф 22 которой представлен на фиг.2), которая находится под горизонтальной поверхностью 23. Данная часть 21 имеет высоту Н. В предпочтительном варианте осуществления упомянутая поверхность 23 определяется с учетом, в частности, вышеупомянутых ошибок.
В предпочтительном варианте данная поверхность 23 имеет ширину D коридора CS безопасного маневрирования. Следовательно, в изображении на фиг.2, которое соответствует упомянутой последней ситуации, коридор CS безопасного маневрирования и поверхность 23 представлены одним и тем же отрезком 24 прямой линии.
Поэтому автоматический полет на малой высоте, выполняемый упомянутой системой 9 обеспечения безопасности, дает возможность летательному аппарату А пролетать на заданной высоте над местностью 2 в автоматическом режиме по траектории ТО полета, вычисленной по цифровой базе данных местности (предварительно загруженной в летательный аппарат А), и выполнять такой полет без риска столкновения с местностью 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НИЗКОВЫСОТНОГО АВТОМАТИЧЕСКОГО ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2365967C1 |
| СПОСОБ УПРАВЛЕНИЯ МАЛОВЫСОТНЫМ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2023 |
|
RU2822805C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ И УСТРОЙСТВО ОТОБРАЖЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА, КОТОРОЕ СЛЕДУЕТ ПЛАНУ ПОЛЕТА | 2006 |
|
RU2356011C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ | 2007 |
|
RU2368954C2 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| СИСТЕМА НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2396515C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
Изобретение относится к области приборостроения и может найти применение для определения ширины коридора безопасного маневрирования летательного аппарата. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит: средство (3), которое может применяться оператором для ввода множества ошибок, каждая из которых влияет на автоматический полет на малой высоте летательного аппарата; средство (4) для определения вероятности из коридора безопасного маневрирования, выход из которого не допускается; и средство (5) для определения ширины упомянутого коридора безопасного маневрирования на основании вышеупомянутых ошибок и вероятности выхода, с учетом, по меньшей мере, одного математического выражения, связывающего, по меньшей мере, ошибки, вероятность выхода и ширину. 7 н. и 10 з.п. ф-лы, 3 ил., 2 табл.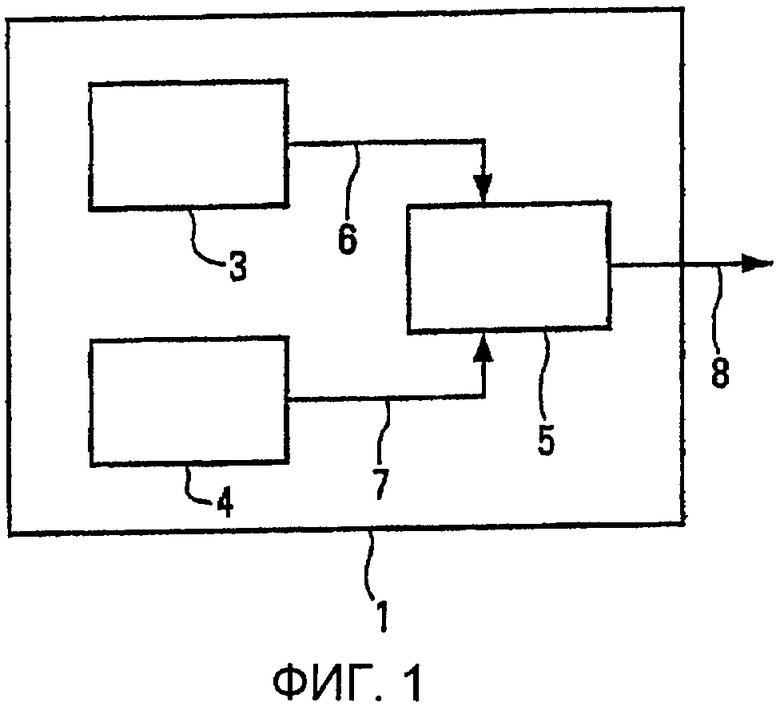
1. Способ определения ширины коридора (CS) безопасного маневрирования, который определяется с каждой стороны латеральной траектории (TL) для траектории (ТО) полета летательного аппарата (А), в котором:
a) используя средство (3) для ввода ошибок, вводят множество ошибок, каждая из которых влияет на автоматический полет на малой высоте летательного аппарата (А);
b) используя средство (4) для определения вероятности выхода из коридора безопасного маневрирования, определяют вероятность выхода из коридора (CS) безопасного маневрирования, выход из которого не допускается; и
c) используя средство (5) для определения ширины коридора безопасного маневрирования, определяют ширину (D) упомянутого коридора (CS) безопасного маневрирования на основании упомянутых ошибок и упомянутой вероятности выхода с учетом, по меньшей мере, одного математического выражения, устанавливающего взаимосвязь между, по меньшей мере, упомянутыми ошибками, упомянутой вероятностью выхода и упомянутой шириной (D).
2. Способ по п.1, в котором на этапе а) вводят, по меньшей мере, некоторые из следующих ошибок:
навигационную ошибку;
ошибку управления;
погрешность траектории полета.
3. Способ по п.1, в котором упомянутые ошибки вводят в форме плотностей вероятностей.
4. Способ по п.3, в котором упомянутые плотности вероятностей удовлетворяют одному из следующих законов:
закону экспоненциального распределения;
закону распределения Лапласа-Гаусса;
закону распределения Пуассона;
закону полиномиального распределения.
5. Способ по п.1, в котором упомянутая вероятность выхода равна 10-8/hdv, где hdv обозначает час полета летательного аппарата (А).
6. Способ по п.1, в котором в случае двух разных ошибок упомянутое математическое выражение представляет собой

где Р обозначает упомянутую вероятность выхода;
d обозначает половину упомянутой ширины (D) коридора (CS) безопасного маневрирования;
f1 обозначает плотность вероятности, относящуюся к первой из упомянутых ошибок; и
f2 обозначает плотность вероятности, относящуюся ко второй ошибке.
7. Способ по п.6, в котором в случае трех разных ошибок с соответствующими отдельными плотностями fi вероятности также применяют упомянутое математическое выражение, позволяющее вычислять Р в виде функции двух плотностей f1 и f2 вероятности, где f1 соответствует плотности вероятности, возникающей из суммы двух ошибок с отдельными плотностями fi вероятности, и f2 соответствует отдельной плотности fi вероятности третьей оставшейся ошибки.
8. Способ по п.1, в котором упомянутые ошибки выражаются в форме закона распределения Лапласа-Гаусса и ширина (D) коридора (CS) безопасного маневрирования соответствует удвоенному среднеквадратическому значению пределов упомянутых ошибок, экстраполированных для целевого значения упомянутой вероятности выхода.
9. Способ по п.8, в котором упомянутое математическое выражение имеет вид
где d обозначает половину упомянутой ширины (D) коридора (CS) безопасного маневрирования;
L(p) является коэффициентом разложения, который зависит от вероятности  появления ошибки; и
появления ошибки; и
σi означает среднеквадратическое отклонение распределения Гаусса ошибки i.
10. Способ по п.1, в котором к упомянутой ширине (D) добавляют допуск на размах крыла летательного аппарата (А).
11. Способ по п.1, в котором вводят, по меньшей мере, одну ошибку, которая обусловлена сбоем, по меньшей мере, одной системы летательного аппарата (А).
12. Способ обеспечения безопасности полета на малой высоте летательного аппарата (А), который проводится по траектории (ТО) полета, содержащей латеральную траекторию (TL) и вертикальную траекторию, в котором:
определяют ширину (D) коридора (CS) безопасного маневрирования посредством способа по п.1;
определяют коридор (CS) безопасного маневрирования, свободный от любых препятствий, который имеет упомянутую ширину (D) и который ограничен с каждой стороны упомянутой латеральной траектории (TL); и
летательный аппарат (А) в автоматическом режиме проводят по упомянутой траектории (ТО) полета.
13. Устройство для определения ширины коридора (CS) безопасного маневрирования, который задается с каждой стороны латеральной траектории (TL) для траектории (ТО) полета летательного аппарата (А), при этом упомянутое устройство содержит:
средство (3), предоставляющее возможность вводить множество ошибок, каждая из которых влияет на автоматический полет на малой высоте летательного аппарата (А);
средство (4) для определения вероятности выхода из коридора (CS) безопасного маневрирования, выход из которого не допускается; и
средство (5) для определения ширины (D) упомянутого коридора (CS) безопасного маневрирования на основании упомянутых ошибок и упомянутой вероятности выхода с учетом, по меньшей мере, одного математического выражения, устанавливающего взаимосвязь между, по меньшей мере, упомянутыми ошибками, упомянутой вероятностью выхода и упомянутой шириной (D).
14. Система для обеспечения безопасности полета на малой высоте летательного аппарата (А), при этом упомянутая система (9) содержит:
первое средство (10) для определения траектории (ТО) полета, содержащей латеральную траекторию (TL) и вертикальную траекторию; и
средство (11) управления для автоматического проведения летательного аппарата (А) по упомянутой траектории (ТО) полета, содержащее также навигационное средство, при этом упомянутая система дополнительно содержит:
устройство (1), в частности, по п.13 для определения ширины (D) коридора (CS) безопасного маневрирования; и
второе средство (17) для определения коридора (CS) безопасного маневрирования, свободного от любых препятствий, который имеет упомянутую ширину (D), определенную упомянутым устройством (1), и который ограничен с каждой стороны упомянутой горизонтальной траектории (TL).
15. Летательный аппарат, содержащий систему (9) обеспечивающую выполнение способа по п.12.
16. Летательный аппарат, содержащий устройство (1) по п.13.
17. Летательный аппарат, содержащий систему (9) по п.14.
| US 5922031 A, 13.07.1999 | |||
| US 3018049 A, 23.01.1962 | |||
| US 4144571 A, 13.03.1979 | |||
| Регулируемая тепловая труба | 1980 |
|
SU937963A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

