Изобретение относится к авиационной навигации, в частности для предотвращения опасности внезапного столкновения летательного аппарата с зоной, над которой он пролетает.
Как указано в Европейских патентах ЕР-А-0565399 и ЕР-А-0802469, эти средства обеспечения авиационной навигации содержат, в частности средства определения информации, касающейся пространственного положения летательного аппарата, например, его относительного (по отношению к пролетаемому рельефу местности) и/или абсолютного (по отношению к некоторой фиксированной высоте типа высоты уровня моря) пространственного положения, а также средства определения вектора скорости летательного аппарата и при необходимости вектора ускорения. Эта информация ниже будет называться информацией о динамике полета летательного аппарата.
На борту летательного аппарата центральный блок управления инерциальной системы, сопряженный с Глобальной Системой Определения местоположения или GPS, связанный с фильтром Калмана, может выдавать часть этой информации, в частности скорость и ускорение летательного аппарата, а также географическую широту и долготу точки его местоположения в данный момент. Другая часть необходимой информации о пространственном положении летательного аппарата может быть получена при помощи так называемых "бароинерциальных" средств измерения (информация об абсолютной высоте полета летательного аппарата) или при помощи радиовысотомера (относительная высота полета летательного аппарата).
Однако средства обеспечения авиационной навигации содержат также устройства предупреждения столкновения с землей, предназначенные для оповещения пилота о том, что может возникнуть опасность столкновения с землей (или с пролетаемой зоной). Такие устройства являются полезными, в частности, в процессе захода летательного аппарата на посадку, а также на этапе набора высоты после взлета, вследствие того, что именно в этих фазах полета летательный аппарат находится в непосредственной близости от земли.
Такие устройства известны под названием "Системы предупреждения о близости к земле" ("Ground Proximity Warning Systems"), сокращенно GPWS, или под названием "Система предотвращения столкновения с землей" ("Ground Collision Avoidance System"), сокращенно GCAS.
Заявитель описал в Европейском патенте ЕР-А-0565399 и в заявке на патент Франции 9604678, а также в заявке на Европейский патент ЕР-А-0802469 устройства обеспечения авиационной навигации типа GCAS, которые содержат:
входное устройство для приема информации, представляющей пространственное положение и динамическое состояние летательного аппарата, в частности, вектор скорости,
рабочее запоминающее устройство, позволяющее хранить трехмерное представление рельефа местности, над которой пролетает летательный аппарат,
средство обработки информации, предназначенное для определения в зависимости от информации о состоянии и положении летательного аппарата сектора обзора относительно этого летательного аппарата и расчета контура рельефа местности в этом секторе в функции пересечения этого сектора с рельефом пролетаемой местности,
средство, обеспечивающее возможность визуализации, в частности, контура рельефа пролетаемой местности.
Такой тип средств обеспечения авиационной навигации может также обеспечивать возможность визуализации для экипажа летательного аппарата предполагаемой будущей траектории его полета и, в случае необходимости, параметров стандартной траектории, основанных на теоретически возможных маневрах уклонения, позволяющих избежать столкновения с рельефом пролетаемой местности.
Особенный интерес вызывает обобщение характеристик подобных систем и их эргономических параметров, а также повсеместное распространение таких систем. Действительно, речь идет об оборудовании такими системами максимально возможного количества гражданских самолетов и о выдаче экипажу самолета возможно более ясной и легко интерпретируемой информации, поскольку экипаж может оказаться в такой ситуации, которая требует особого внимания и адекватных действий.
В процессе захода на посадку или выхода на наземную цель было предложено визуализировать рельеф пролетаемой местности в виде кривых, представляющих равные горизонтальные высоты или уровни. Информацию в подобном представлении достаточно трудно интерпретировать, в частности, в том случае, когда летательный аппарат перемещается в плоскости, не являющейся горизонтальной, и/или перемещается в непосредственной близости от зоны аэропорта или в районах с сильно пересеченным рельефом местности.
В то же время, в некоторых ситуациях пролетаемый рельеф местности оказывается особенно сильно пересеченным и/или данный летательный аппарат имеет серьезные проблемы технического порядка. В подобных случаях предлагаемая траектория уклонения от столкновения с препятствием может оказаться невозможной вследствие того, что она пересекается с рельефом пролетаемой местности и вызывает выдачу аварийного предупреждающего сигнала, тогда как естественным образом реализуемая траектория полета данного летательного аппарата не представляет опасности столкновения с пролетаемым рельефом местности.
По упомянутым выше соображениям, а также по другим соображениям существующие на сегодняшний день устройства авиационной навигации не обеспечивают в полной мере удовлетворения существующих требований в этой области.
В основу данного изобретения поставлена задача создания навигационного устройства типа GCAS, которое было бы способно полностью или частично устранить отмеченные выше недостатки существующих систем.
Поставленная задача решается тем, что в устройстве обеспечения авиационной навигации средство обработки информации выполнено таким образом, что прежде всего осуществляется расчет векторов вспомогательных скоростей в результате смещения вектора скорости (мгновенного) летательного аппарата в соответствии с выбранным законом углового сканирования, а затем определяется сектор возможного полета при помощи полосы линий траекторий движения летательного аппарата, исходя из известного вектора скорости и из известных вспомогательных векторов скорости.
Под вспомогательным вектором скорости подразумевается вектор, две из трех координат которого в сферической системе координат, отнесенной к центру вращения для положения летательного аппарата, а именно радиус r и угол θ по отношению к вертикали, являются неизменными по отношению к аналогичным координатам мгновенного вектора скорости, тогда как угол ϕ его проекции в горизонтальной плоскости отличается от угла проекции вектора скорости. Другими словами, для обеспечения углового сканирования изменяют угол ϕ в одну и в другую стороны от его величины, которую он имеет на уровне вектора скорости.
Таким образом, пилот располагает контуром (или картой), который представляет рельеф местности в направлении вектора скорости летательного аппарата и в выбранном угловом секторе.
В данном случае слово "контур" используется в самом широком смысле, этот термин представляет все линии пересечения, которые индицируются одновременно и каждая из которых разделяет две зоны или региона. Этот термин обозначает контур земной поверхности (называемый также фоном карты или фоном изображения) и контур предупреждения об опасности.
В предпочтительном варианте реализации угловое сканирование осуществляют в диапазоне от 1o до 360o, но наиболее предпочтительно в диапазоне от 60o до 120o.
В соответствии с предпочтительным способом реализации все линии траектории имеют одну и ту же геометрию. В частности, эти линии могут быть прямыми или искривленными. Эти линии могут представлять собой копии будущей прогнозируемой траектории полета летательного аппарата, выведенной из его текущей траектории (в этом случае эти линии называют "траекториями с неизменными командами пилотирования").
Для того чтобы повысить точность упомянутого контура, средство обработки информации устроено таким образом, чтобы определить несколько слоев линий траектории, имеющих различные вертикальные смещения и предпочтительно отстоящие друг от друга в исходной точке строго регулярным или равномерным образом. Эти слои, по меньшей мере, частично параллельны между собой. Это позволяет "зондировать" рельеф на значительных высотах (или слоях).
Однако линии траекторий могут также быть сформированы исходя из линий (первых) прогнозируемой траектории уклонения (или облета препятствия), основанной на выполнении тех или иных маневров (в этом случае эти линии называют "траекториями с модифицированными командами пилотирования в соответствии с первым выбранным законом уклонения").
В данном случае речь может идти, например, о траектории уклонения от столкновения с препятствием, известной специалисту в данной области техники под названием "caution" (зона предостережения или повышенного внимания), которая получается при реализации первого закона уклонения, содержащего продолжение представления текущей траектории, установленного в функции того или иного выбранного критерия, за которым следует маневр, имеющий вертикальную составляющую.
При использовании этой гипотезы средство обработки информации может быть реализовано так, чтобы обеспечить возможность в случае, когда по меньшей мере одна из первых прогнозируемых или расчетных траекторий уклонения пересекает рельеф местности, выполнить расчет контура в функции исходной точки каждого маневра на каждой первой прогнозируемой или расчетной линии траектории уклонения упомянутого слоя.
В этом случае пилот летательного аппарата располагает контуром, который можно квалифицировать как первый контур тревоги (или контур предварительного предупреждения об опасности), который, в случае необходимости, может быть индицирован одновременно с контуром, полученным при помощи будущих прогнозируемых или расчетных траекторий, или отдельно от него. Такой первый контур тревоги выдает пилоту информацию о расстоянии, которое отделяет летательный аппарат от пролетаемого рельефа местности в "направлении" первой предложенной траектории уклонения.
Линии траектории также могут представлять собой вторые линии прогнозируемой или расчетной траектории уклонения (или облета) с модифицированными командами пилотирования в соответствии со вторым выбранным законом уклонения от столкновения, исходящим из вектора скорости летательного аппарата и вспомогательных векторов.
В данном случае речь может идти, например, о траектории уклонения, известной специалисту в данной области техники под названием "warning" (зона предупреждения об опасности), которая получается при использовании второго закона уклонения, содержащего продолжение представления текущей траектории, установленного в функции того или иного выбранного критерия, с последующим маневром, имеющим вертикальную составляющую.
При использовании этой гипотезы средство обработки информации может быть реализовано так, чтобы обеспечить возможность в том случае, когда по меньшей мере одна из упомянутых вторых прогнозируемых или расчетных траекторий уклонения от столкновения пересекает пролетаемый рельеф местности, выполнить расчет контура в функции исходной точки каждого маневра на каждой второй прогнозируемой линии траектории уклонения от столкновения упомянутого слоя.
В этом случае пилот летательного аппарата имеет в своем распоряжении контур, который можно квалифицировать как второй контур тревоги (или контур предупреждения об опасности), и который, в случае необходимости, может быть индицирован в то же самое время, что и первый контур тревоги и контур, полученный при помощи будущих прогнозируемых или расчетных траекторий, или отдельно от одного или другого из этих контуров. Такой второй контур тревоги выдает пилоту информацию о расстоянии, которое отделяет летательный аппарат от пролетаемого рельефа в "направлении" второй предложенной траектории уклонения от столкновения.
В предпочтительном варианте реализации каждое пересечение между рельефом местности и слоем траекторий уклонения от столкновения ограничено передней частью, причем в этом случае каждый контур образован этой передней частью и продолжением в направлении по ходу полета, определяемым в соответствии с выбранным правилом, например линейным продолжением.
Под упомянутой выше "передней частью" следует понимать зону или область, расположенную между одним участком контура и летательным аппаратом, а под последующей частью следует понимать зону или область, располагающуюся по полету за этим участком контура.
В соответствии с другой характеристикой предлагаемого изобретения средство обработки информации содержит средства дифференциации, которые присваивают различные маркировки или отличительные признаки зонам, которые располагаются по одну и по другую стороны от каждой части контура, причем эти маркировки или отличительные признаки выбираются в функции некоторого предварительно установленного критерия, основанного на степени риска столкновения летательного аппарата с рельефом.
Так, например, упомянутый предварительно установленный критерий может представлять собой закон, основанный на величине расстояния, отделяющего каждую точку контура от выбранной точки рельефа, расположенной в вертикальной плоскости, проходящей через данную точку контура, причем в этом случае различные маркировки или отличительные признаки соответствуют различным интервалам расстояния, которые выбирают для соответствующей степени риска столкновения.
В предпочтительном варианте реализации предлагаемого изобретения каждая маркировка состоит в окрашивании различных элементов сигнальной информации, причем цвета для окрашивания выбираются в соответствии с совокупностью нормативных документов, содержащей по меньшей мере Европейскую норму JAR 25-1322 и Американскую норму FAR 25-1322. Согласно этим нормам наиболее "холодный" цвет соответствует наименьшей степени риска столкновения летательного аппарата с рельефом местности. В качестве цветов окрашивания элементов сигнальной информации можно выбрать, например, следующие цвета, располагающиеся в порядке убывания степени риска столкновения: красный, оранжевый, желтый, зеленый и голубой.
Разумеется, можно выбрать в качестве маркировок и различные оттенки серого цвета во всем диапазоне от белого до черного, а также применить различные типы штриховок (или сеток).
В соответствии с еще одной характеристикой предлагаемого изобретения средство обработки информации устроено так, чтобы обеспечить возможность управления чередованием индикации контура и метеорологической карты. Можно предусмотреть, чтобы индикация контура и метеорологической карты осуществлялась одновременно. Можно также предусмотреть, чтобы одновременно с индикацией контура осуществлялась индикация той или иной дополнительной информации типа, например, определения местоположения аэропортов.
В соответствии с еще одной характеристикой предлагаемого изобретения средство обработки информации устроено так, чтобы обеспечить включение звукового или визуального сигнала предостережения или предварительного предупреждения, выбранного в данном случае при условии пересечения между слоем, сформированным первыми линиями траектории уклонения. Можно также предусмотреть, чтобы звуковой и/или визуальный предупреждающий сигнал включался в случае пересечения между слоем, сформированным вторыми линиями траектории уклонения. Разумеется, можно также предусмотреть только один или другой из упомянутых сигналов предостережения и предупреждения, а также включение обоих этих сигналов. Эти сигналы могут, например, обеспечивать автоматическое включение индикации контура.
В соответствии с еще одной характеристикой предлагаемого изобретения можно предусмотреть метод "облета рельефа местности", содержащий по меньшей мере одну горизонтальную составляющую. Для этого средство обработки информации может быть устроено так, чтобы выдавать другой визуальный и/или звуковой предупреждающий сигнал в том случае, когда имеет место подтвержденное выбранным критерием пересечение между, с одной стороны, рельефом и по меньшей мере одной из первой и второй траекторий уклонения, а с другой стороны, между рельефом и, по меньшей мере, будущей прогнозируемой или расчетной траекторией.
Этот выбранный критерий может быть основан, например, на вертикальном расстоянии, которое отделяет представление пересечения между рельефом и траекторией уклонения и вершиной рельефа строго над точкой пересечения этого рельефа и соответствующей траектории уклонения.
В предпочтительном варианте реализации средство обработки информации может определить область, охватывающую каждую линию траектории, образующую слой, в функции информации о состоянии летательного аппарата и о пролетаемом рельефе местности, а также определить пересечение между каждым слоем и рельефом местности исходя из пересечений упомянутых областей каждой из соответствующих линий траектории с упомянутым рельефом. В этом случае такие линии траектории называют "щупом". Они позволяют учесть возможные погрешности измерений пространственного положения летательного аппарата и его динамики.
В этом случае точка пересечения линии траектории, способствующая формированию контура, в предпочтительном варианте реализации представляет собой ту точку пересечения среди всех точек пересечения между упомянутой областью этой линии траектории и рельефом пролетаемой местности, которая обладает наибольшим значением высоты.
В соответствии с еще одной характеристикой предлагаемого изобретения вход устройства обеспечения авиационной навигации может принимать информацию о состоянии летательного аппарата, в частности информацию об истинной высоте и об относительной высоте над пролетаемым рельефом местности, и средство обработки информации устроено так, чтобы определять прогнозируемые или расчетные траектории (будущие) и траектории уклонения (или облета) исходя из высоты, выбранной среди истинной высоты, относительной высоты и некоторой композиционной высоты в функции сопоставления их с двумя предварительно определенными пороговыми значениями высоты, причем эта выбранная высота будет представлять собой:
либо истинную высоту в том случае, когда эта истинная высота оказывается меньше обоих пороговых значений;
либо относительную высоту в том случае, когда эта относительная высота превышает оба пороговых значения;
либо композиционную высоту в том случае, когда истинная высота имеет величину, заключенную в диапазоне между двумя пороговыми значениями, причем эта композиционная высота предпочтительно формируется исходя из взвешенной комбинации истинной и относительной высот.
Такой принцип позволяет повысить надежность получаемых результатов (контура).
В соответствии с предпочтительным вариантом реализации предлагаемого изобретения устройство содержит массовое запоминающее устройство для хранения базы данных, представляющей по меньшей мере часть поверхности земного шара, а также средство управления, обеспечивающее извлечение из этой базы данных трехмерного представления определенных участков земного рельефа (называемые также локальными временными картами) в функции параметров пространственного положения летательного аппарата, чтобы размещать эти пространственные представления по мере движения летательного аппарата над земной поверхностью в рабочем или оперативном запоминающем устройстве. Это позволяет сделать данное устройство автономным.
Согласно изобретению предлагается также способ обеспечения воздушной навигации летательного аппарата, содержащий следующие приемы:
получение на борту летательного аппарата информации о его состоянии, представляющей пространственное положение этого летательного аппарата и вектор скорости его движения,
хранение в рабочем запоминающем устройстве трехмерного представления рельефа местности региона, пролетаемого данным летательным аппаратом,
определение сектора исследования в функции информации о состоянии летательного аппарата, отнесенного к летательному аппарату, и расчет в этом секторе контура в функции пересечения сектора с рельефом местности,
визуализацию контура,
в котором согласно изобретению при определении сектора исследования осуществляют
расчет вспомогательных векторов скорости путем смещения вектора скорости летательного аппарата в соответствии с выбранным законом углового сканирования,
определение сектора на основе вектора скорости летательного аппарата и вспомогательных векторов скорости.
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже подробного описания предпочтительного варианта выполнения со ссылками на сопроводительные чертежи, на которых:
фиг. 1 изображает схему известного устройства обеспечения авиационной навигации типа GCAS, аналогичного описанным в источниках ЕР-А-0565399 и FR 9604678;
фиг.2 - блок-схему устройства обеспечения авиационной навигации согласно изобретению;
фиг.3 - область погрешности определения пространственного положения летательного аппарата согласно изобретению;
фиг. 4 - погрешность, связанную с прогнозируемой или расчетной траекторией летательного аппарата, спроектированной на горизонтальную плоскость, согласно изобретению;
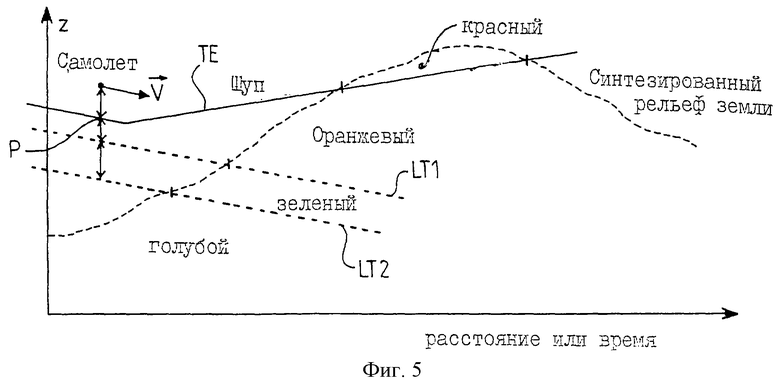
фиг. 5 - диаграмму вертикального разреза для определенной ситуации, первый вариант реализации, положение самолета относительно наглядно представленного рельефа пролетаемой местности в данный момент времени, а также три прямолинейные направляющие соответственно для траектории облета и параллельных расчетных траекторий согласно изобретению;
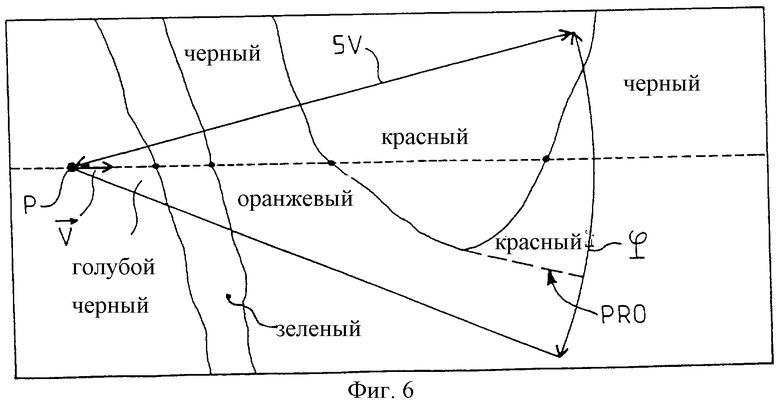
фиг.6 - карту степеней риска столкновения летательного аппарата, сформированную на основе множества сечений, соответствующую одному циклу сканирования, согласно изобретению;
фиг. 7А и 7В - принцип второго варианта реализации изобретения для двух различных ситуаций;
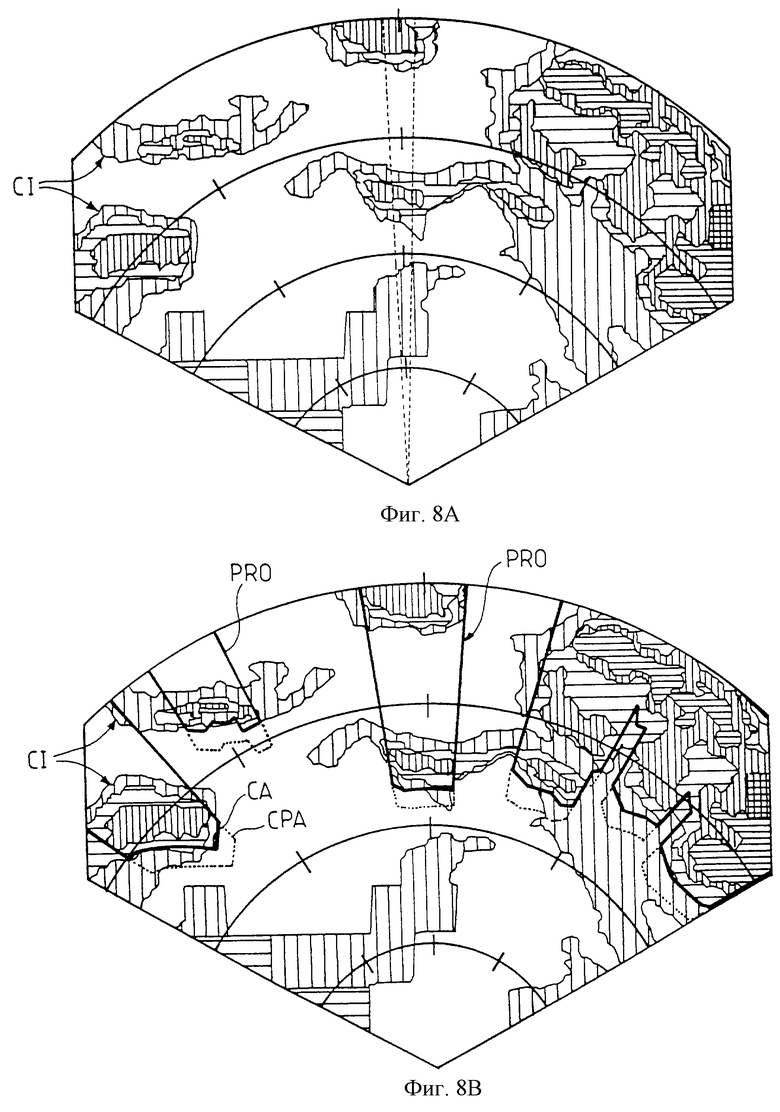
фиг. 8A-8D - различные варианты визуализации, полученные в соответствии со вторым вариантом реализации предлагаемого изобретения;
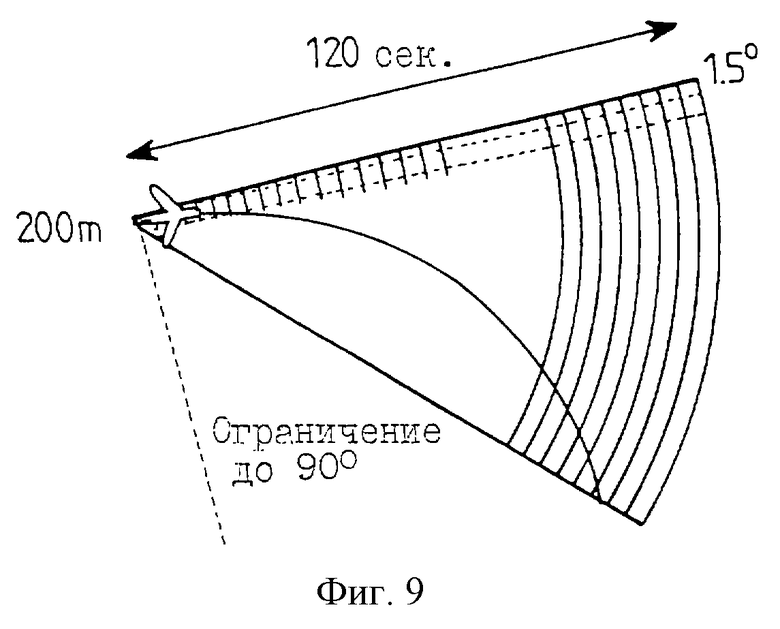
фиг. 9 - искривленную линию траектории, спроектированную на плоскость, согласно изобретению;
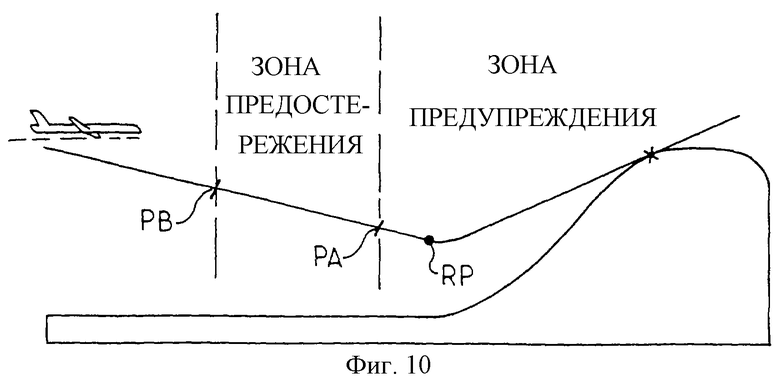
фиг. 10 - варианты формирования визуализации, показанной на фиг.8A-8D, согласно изобретению;
фиг. 11 - схему пространств перед летательным аппаратом в случае, когда может внезапно появиться ложный предупреждающий сигнал, если не задержана обработка информации, согласно изобретению.
Принимая во внимание технический характер излагаемого материала, содержание источников ЕР-А-0565399 и ЕР-А-0802469 следует рассматривать как неотъемлемую составную часть предлагаемого описания. То же самое можно сказать и о следующем документе - записка фирмы ДАССО ЭЛЕКТРОНИК 810-196 AN, опубликованная в октябре 1997 г. и озаглавленная "А New Approach to CFIT Prevention and to improve situational awareness: GCAS GROUND COLLISION AVOIDANCE SYSTEM".(Новый подход к предупреждению CFIT и улучшению предупреждения).
Стандартные сообщения, обычно используемые в гражданской авиации, выдаются на английском языке. Среди этих сообщений будут упомянуты следующие термины, квалифицирующие степень риска столкновения летательного аппарата с землей:
"advisory" или уведомление, которое соответствует указанию или совету;
"caution", которое в данном описании будет называться предостережением или предварительным предупреждением и которое носит предупредительный характер;
"warning", которое в данном описании будет называться предупреждением и которое носит срочный или неотложный характер.
Отдельно или в совокупности эти различные уровни сигнальных сообщений в последующем изложении будут называться "оповещениями". Для облегчения понимания в описании не упоминаются уведомляющие сообщения или оповещения типа "advisory", которые могут рассматриваться, например, как предварительная версия сигнальных сообщений типа предостережения.
В описании также использованы единицы измерения различных величин, не принадлежащие к системе единиц МКСА, хотя они и могут быть выведены из единиц этой системы, вследствие употребительности упомянутых несистемных единиц в гражданской авиации.
Устройство, описанное в ЕР-А-0565399, предназначено для установки на борту летательного аппарата, в частности самолета. Это устройство (фиг.1) содержит комплекс оборудования 2, способный выдавать в виде соответствующих электрических сигналов информацию о параметрах полета летательного аппарата, в частности, информацию о его пространственном положении и о динамике полета. Этот комплекс оборудования содержит центральный блок управления инерциальной или бароинерциальной системой 20 или INU и/или радионавигационное оборудование, в данном случае приемник навигационной системы GPS (но речь может идти и об оборудовании IRS) 21 (фиг.2) вместе с его антенной, радиовысотомер 22 вместе с его антенной или другие бортовые навигационные датчики.
Центральный блок управления инерциальной системы 20 выдает информацию о составляющих векторов скорости (V) и ускорения (GAMMA) летательного аппарата. Путем различных преобразований из этой информации можно получить значения всех или части связанных характеристических углов (таких как угол атаки, угол скольжения, угол наклона траектории, угол тангажа, угол курса, угол крена) или непосредственно принимать значения этих углов, используемые самим центральным блоком управления инерциальной системы. Эти угловые величины могут быть введены и/или использованы на уровне поста управления летательного аппарата. Для получения информации о высоте полета центральный блок управления инерциальной системы известным образом взаимодействует с барометрическим высотомером (не показан).
Для лучшего понимания описания ниже определены следующие обозначения:
Zb представляет собой барометрическую высоту, выдаваемую в результате измерения атмосферного давления и изменяющуюся в зависимости от высоты полета и от текущих метеорологических условий в зоне полета;
Zi представляет собой инерциальную высоту, рассчитанную при помощи двойного интегрирования вертикального ускорения летательного аппарата, измеренного при помощи акселерометров центрального блока управления инерциальной системы (долгосрочные изменения);
Zbi представляет собой бароинерциальную высоту, то есть высоту Zb, скорректированную при помощи высоты Zi (например, при помощи контура третьего порядка);
Zc представляет собой высоту, рассчитанную по формуле HRS+Zta, где HRS представляет собой радиовысоту (или относительную высоту), выдаваемую одним или несколькими радиовысотомерами летательного аппарата (при этом точность показаний высоты от радиовысотомеров составляет несколько метров), и Zta представляет собой высоту земной поверхности под летательным аппаратом, выдаваемую при помощи файла, содержащего информацию о пролетаемой земной поверхности (более подробно об этом будет сказано ниже);
Zgps представляет собой высоту, получаемую при помощи, например, навигационной системы GPS.
Приемник навигационной системы GPS 21 (фиг.2) выдает необработанные измерения географической широты L1, географической долготы G1 и высоты полета Z1 (то есть высоты Zgps) данного летательного аппарата, обновляемые постоянно с периодом обновления р1, величина которого составляет от нескольких секунд до нескольких минут.
Путем интегрирования векторов скорости и ускорения центральный блок управления инерциальной системы 20 выдает другие измерения географической широты L0, географической долготы G0 и высоты полета Z0 (то есть высоты Zbi) летательного аппарата, достаточно точные, но подверженные дрейфу во времени.
Блок 25 осуществляет сопоставление двух этих типов измерений и признает действительными величины LI, G1 и Z1 в том случае, если они когерентны с величинами L0, G0 и Z0. Такая технология подтверждения достоверности измерений является известной. Признанные достоверными измерения L2, G2 и Z2 постоянно обновляются с периодом p1. Однако эти измерения постоянно уточняются при помощи центрального блока управления инерциальной системы с периодом р2, составляющим примерно одну секунду.
В блоке 28 осуществляется экстраполяция полученной информации на промежуток времени между последним моментом измерения, выполненного приемником 21, и текущим моментом времени. Такая экстраполяция, в частности, оказывается полезной в том случае, когда имеются проблемы с темпом обновления информации, который может быть слишком медленным.
Радиовысотомер 22 выдает высоту летательного аппарата над землей, обозначаемую HRS.
Блок 3 (фиг.1) содержит файл информации о земной поверхности, о формировании которого более подробно описано ниже. В функции величин широты L и долготы G осуществляют обращение к соответствующей части этого файла, называемой локальной картой. Эта локальная карта образует трехмерное представление пролетаемой летательным аппаратом области и сохраняется в локальном запоминающем устройстве 40.
Исходя из локальной карты и с учетом величин L, G, Z, а также величины HRS, в блоке 4 осуществляются расчеты предупреждения столкновения с землей, в предпочтительном варианте реализации сопровождаемые расчетами траекторий облета земного рельефа.
При наличии опасности столкновения с землей выдается соответствующий предупреждающий сигнал из блока 51. Директорный индикатор 53 может подсказать экипажу необходимый маневр облета препятствия. В этом состоит предназначение поста управления (или пилотирования). Локальная карта также может быть использована для формирования синтезированного изображения 60 при помощи устройства визуализации 55.
Все, о чем кратко было сказано выше, описано в источниках ЕР-А-0565399 и ЕР-А-0802469, где указано также каким образом сблизить и взаимно проверить различную информацию от располагаемых источников этой информации, в частности, в вертикальной плоскости.
Одной из главных основ источника ЕР-А-0565399 является то обстоятельство, что имеется возможность хранить на борту летательного аппарата специальный файл, содержащий информацию о земной поверхности и способный представить практически всю поверхность земного шара в пределах контура и разрешающей способности, которые подходят для решения задач, стоящих перед летательным аппаратом.
В этом случае анализ мгновенного и прогнозируемого положения летательного аппарата может сводиться к формированию совокупности тестовых кривых. Эта совокупность может сформировать по меньшей мере два типа предупреждающей сигнализации:
сигнал предостережения, указывающий конфигурацию, опасную в среднесрочном плане,
сигнал предупреждения, указывающий конфигурацию, требующую незамедлительных действий пилота, поскольку под угрозой оказывается безопасность полета.
Для решения этой задачи предусматривают формирование двух поверхностей (кривых в пространстве) защиты данного летательного аппарата от столкновения с пролетаемым рельефом местности. Эти предохранительные поверхности определяются в соответствии с одним и тем же принципом, но с использованием различных параметров, и включают:
защитную поверхность краткосрочного плана ССТ, предназначенную для исключения авиационной катастрофы. Как только точка рельефа земной поверхности входит в упомянутую поверхность или в верхнюю огибающую поверхности ССТ, пилот данного летательного аппарата должен срочно вмешаться в управление (предупреждающий сигнал), осуществляя тот или иной маневр облета или уклонения;
защитную поверхность среднесрочного плана СМТ, предназначенную для предупреждения пилота о том, что траектория управляемого им летательного аппарата может пересечься с наземным препятствием, если эта траектория будет оставаться неизменной, и что пилот должен рассмотреть возможность выполнения маневра облета или уклонения от препятствия (сигнал предостережения или предварительного предупреждения).
Эти защитные поверхности, которые представляют собой важный элемент системы предупреждения столкновения с землей, могут быть сформированы на основе многих статических и динамических параметров данного летательного аппарата, в частности:
передаточной функции пилотирования летательного аппарата, то есть его способности к совершению того или иного маневра;
запаздывания TRO, связанного с временем реакции пилота летательного аппарата;
горизонтальной скорости Vh полета летательного аппарата;
скорости набора высоты Vz летательного аппарата;.
допустимого коэффициента перегрузки n.g;
предусмотренной безопасной высоты пролета над рельефом местности;
допустимого крена летательного аппарата.
Для продолжения описания примеров реализации предлагаемого изобретения необходимо дать несколько определений.
В последующем изложении "мгновенной осью" траектории летательного аппарата называют либо касательную к мгновенной траектории (направление мгновенного вектора скорости летательного аппарата), либо ось пройденной и прогнозируемой траектории (в том случае, когда летательный аппарат выполняет вираж, эта "ось" является криволинейной), либо некоторую ось (в принципе промежуточную), определяемую, например, при помощи взвешенной линейной комбинации двух упомянутых выше осей.
В последующем изложении "вертикальной плоскостью" называют поверхность (которая необязательно является плоской), содержащую вертикаль, проходящую через данный летательный аппарат и мгновенную ось траектории полета этого летательного аппарата. Если летательный аппарат выполняет вираж и в качестве мгновенной оси траектории его полета используется ось пройденной и прогнозируемой траектории, то эта "вертикальная плоскость" представляет собой криволинейную поверхность. "Вертикальными" считают маневры летательного аппарата, при осуществлении которых главная их составляющая располагается в вертикальной плоскости.
В последующем изложении "горизонтальной плоскостью" называют горизонтальную плоскость, проходящую через базовую точку или точку отсчета данного летательного аппарата (например через его центр тяжести), и считают "горизонтальными" или "боковыми" те маневры летательного аппарата, главная составляющая которых располагается в горизонтальной плоскости. И в этом случае горизонтальная "плоскость" может представлять собой кривую поверхность в пространстве, определяемую в зависимости от траектории данного летательного аппарата.
Среди горизонтальных маневров различают те, которые выполняются влево, и те, которые выполняются вправо от прогнозируемой траектории данного летательного аппарата.
И наконец, понятия "вертикальный", а также "горизонтальный" или "боковой" будут также использоваться для квалификации, в частности, наземных препятствий и опасностей, которые могут быть встречены в процессе выполнения маневров.
Предельная кривая облета (или уклонения) в вертикальной плоскости может быть определена тремя участками:
от момента времени Т0 до момента времени Т1 продолжается текущая траектория полета (без выполнения маневров) на протяжении времени, равного запаздыванию RT0=T1-T0 (соответствующему времени реакции);
от момента Т1 до момента Т2 происходит переходный период, связанный с уменьшением крена в случае необходимости и с изменением радиуса кривизны траектории от бесконечности до радиуса RT набора высоты;
от момента Т2 до момента Т3 реализуется собственно траектория облета, радиус кривизны которой Rт непосредственно является функцией квадрата линейной скорости летательного аппарата, поделенной на реально приложенный коэффициент перегрузки, что может быть выражено следующей формулой:
Rт=(Vn)2/n.g
Сказанное выше в основном было проиллюстрировано на фиг.6 источника ЕР-А-0565399.
В заявленном изобретении к упомянутой предельной кривой облета (или уклонения) добавлен и четвертый участок - после момента Т3 траектория имеет вид прямой линии с наклоном, связанным с аэродинамическими (летными) характеристиками данного летательного аппарата.
На практике эта "предельная кривая облета" представляет собой поверхность в пространстве, которую называют "щупом". Для цифровой обработки эта поверхность квантуется в семейство криволинейных сегментов.
Сначала определяют траекторию, соответствующую стандартному маневру облета препятствия в вертикальной плоскости или SVRM ("Standard Vertical Recovery Manoeuver"). Используя мгновенную ось траектории полета данного летательного аппарата и/или в соответствии с ориентацией прогнозируемой траектории (или их линейной комбинации), можно обеспечить поворот относительно этой оси упомянутого стандартного маневра SVRM вплоть до точки, где он соприкоснется с огибающей пролетаемого земного рельефа. После этого можно определить момент времени или вертикальную точку отсчета VRP ("Vertical Reference Point"), являющиеся началом выполнения маневра SVRM.
Перед этой точкой VRP на прогнозируемой траектории полета определяют два момента времени VT5 и VT20, удовлетворяющие, например, следующим условиям: VT5=VRP-5 с и VT20=VRP-20 с.
В этом случае "вертикальное" предостережение и "вертикальное" предупреждение формируются, соответственно, с того момента, как летательный аппарат пересечет точку VT20, и с того момента, как он пройдет точку VT5. Само собой разумеется, что предупреждающий сигнал "снимает" предостерегающий сигнал.
Упомянутые средства позволяют выдать экипажу данного летательного аппарата предупреждающий сигнал "набрать высоту" ("Pull up") в том случае, когда прогнозируемая траектория полета позволяет предполагать определенную опасность столкновения с полосой пролетаемого рельефа местности, чтобы пилот имел возможность немедленно предпринять маневр облета этого рельефа с минимально необходимым запасом или коэффициентом безопасности. Понятие минимального запаса безопасности распространяется одновременно как на время реакции пилота как человека, так и на расстояние до рельефа, который необходимо облететь. Выражение "полоса пролетаемого рельефа" учитывает не только рельеф местности, располагающийся непосредственно по оси траектории полета данного летательного аппарата, но и прилегающие к нему с обеих сторон участки.
С этим предупреждающим сигналом связан предварительный сигнал (сигнал предостережения), который выдается на несколько секунд раньше упомянутого предупреждающего сигнала для того, чтобы заранее известить экипаж данного летательного аппарата о близости этой потенциальной опасности. Однако существуют случаи, когда оказывается нормальным, что летательный аппарат преодолевает последнюю точку, в которой еще имеется возможность осуществить стандартный маневр облета препятствия. Таким образом, за этой последней точкой уже больше невозможен никакой маневр "вертикального" облета.
В предлагаемом изобретении формируют так называемые "линии траектории".
Линия траектории формируется исходя из расчетной или прогнозируемой траектории самолета, рассчитываемой на основе его текущего пространственного положения и существующих динамических параметров. Эта прогнозируемая траектория может быть рассчитана без изменения команд пилотирования или, напротив того, с изменением тех или иных параметров управления, то есть с выполнением того или иного маневра, который будет определенным образом модифицировать динамику летательного аппарата.
Следует обратить внимание, что линия траектории не является непременно истинной будущей траекторией летательного аппарата. В случае необходимости она может быть смещена в пространстве по положению и по направлению, о чем более подробно сказано ниже.
И, наконец, по меньшей мере для линий траектории, которые действительно представляют собой возможные будущие траектории летательного аппарата, можно предусмотреть вокруг данной линии траектории некоторую область (фиг.3 и 4), учитывающую различные границы погрешностей. В частности эти границы описаны в источниках ЕР-А-0565399 и/или ЕР-А-0802469.
Вычисления, требуемые для реализации предлагаемого изобретения, в частности, необходимые для расчета линий траектории, могут быть выполнены с использованием микропроцессора типа POWER PC 603 при помощи программного обеспечения, написанного, например, на языке С типа C.ANSI, и при содействии, в случае необходимости, дополнительного процессора типа DSP.
Далее описан общий принцип предлагаемого изобретения со ссылками на фиг. 5 и 6, которые схематически иллюстрируют первый способ реализации этого изобретения.
На фиг. 5 показана стандартная предельная траектория облета ТЕ препятствия в виде рельефа местности ("Standard Horizontal or Vertical Recovery Manoeuver"), которая, начинаясь от представленного символом Р положения самолета, продолжается коротким участком продления текущей траектории этого самолета, а затем продолжается линейным подъемом, образующим выбранный вертикальный угол относительно текущей траектории, что будет называться "щупом".
"Синтезированный рельеф земной поверхности", полученный на основе упомянутой выше базы данных, показан жирным пунктиром.
Под самолетом представлены также две линии траектории LT1 и LT2, которые в данном случае параллельны представленной траектории самолета (а также пройденной траектории, поскольку предполагается, что самолет летит по прямой линии).
На фиг. 5 и 6 цвета по техническим причинам не могут быть реально воспроизведены, вследствие этого заменены соответствующей штриховкой.
Сектор визуализации SV схематически представлен на фиг.6. В данном случае он начинается от точки, представляющей текущее положение Р самолета, причем схема представляет собой проекцию на горизонтальную плоскость.
Здесь рельеф земной поверхности определяется кривыми уровней или высот, но построенными перпендикулярно плоскостям, которые отвечают двум следующим условиям:
всякий раз проходить через соответствующую линию траектории LT1 или LT2;
быть перпендикулярными плоскости фиг.5 (эта перпендикулярность касается только случая полета по прямой линии).
В этом случае рельеф земной поверхности может быть визуализирован так, как это показано на фиг.6, где голубым цветом окрашены наиболее низкие части рельефа, которые располагаются под линией LT2, зеленым цветом окрашены части земного рельефа, располагающиеся в промежутке между линиями траектории LT1 и LT2, оранжевым цветом окрашена часть земного рельефа, располагающаяся выше линии траектории LT1. В предпочтительном варианте реализации изобретения за пределами сектора визуализации SV единственным используемым цветом является черный цвет.
Эти пересечения линий траектории с плоскостями определяют участки контура, которые формируют "фон карты" или "фон изображения".
Кроме того, для осуществления собственно операции оповещения экипажа рассматривают пересечение траектории облета ТЕ с рельефом земной поверхности. "Существенные" в этом смысле части рельефа земной поверхности располагаются выше траектории облета ТЕ и окрашены красным цветом.
Действительное соответствие между схемой на фиг.5 и схемой на фиг.6 существует только для горизонтальной пунктирной линии на фиг.6. При этом остальная часть схемы фиг.6 получается аналогичным способом, понятным специалисту в данной области техники. В целом контур на фиг.6 представляет собой результат одного цикла углового сканирования на заданном секторе обзора, который в данном случае представляет собой сектор величиной примерно 30o. Однако величина или угловой раствор этого сектора могут быть заключены в диапазоне от 1o до примерно 360o, если в этом есть необходимость.
В то же время пунктирная линия PRO на фиг.6 представляет "линейное" продолжение по полету передней части контура.
Алгоритмы формирования предупреждающего экипаж сигнала используются с одновременным учетом рисков столкновения летательного аппарата с рельефом земной поверхности VR при движении по следующим прогнозируемым траекториям (фиг.11):
будущая траектория полета самолета (обозначенная на фиг.11 символом TF);
траектория облета для формирования сигнала предостережения - "щуп А" (обозначенный символом ТРА);
траектория облета для формирования сигнала предупреждения ("warning") в соответствии с маневром "номинального облета" (называемого также "траекторией стандартного облета"), вдоль которой можно следовать в том случае, если формируется предупреждающий сигнал, связанный с отслеживанием будущей траектории - "щуп В" (обозначенный символом ТРВ). В настоящее время маневр "номинального облета" в основном выполняется в вертикальной плоскости (после выравнивания самолета в том случае, если он выполнял вираж).
Чаще всего самолет летит по прямой линии. Из этого следует, что любой рельеф земной поверхности, выявленный щупом А, обязательно выявляется также и щупом В, поскольку обе соответствующие прогнозируемые траектории располагаются в одной и той же вертикальной плоскости.
Зато ситуация является принципиально другой в том случае, когда самолет выполняет вираж. Соответствующие оси двух траекторий могут располагаться соответственно в двух смещенных друг относительно друга вертикальных плоскостях, образующих между собой некоторый горизонтальный угол, величина которого зависит от мгновенного радиуса выполняемого виража.
В этом случае и в соответствии с весьма значимым аспектом предлагаемого изобретения предполагается действовать следующим образом: предупреждающие сигналы сильного привлекающего действия (специальные световые сигнализаторы и предостерегающие голосовые сообщения, но не общая визуализация), формируемые в результате выявления столкновения между стандартной траекторией облета и рельефом земной поверхности могут быть заблокированы в том случае, когда никакие столкновения не выявлены на будущей траектории полета самолета и/или на траектории облета ТРА, которая может быть инициирована в процессе реализации этой будущей траектории.
Такой подход позволяет обеспечить удовлетворительные эксплуатационные характеристики данной системы предупреждения столкновения с землей, исключая при этом выдачу несвоевременного предупреждающего сигнала в том случае, когда пилот уже начал осуществление соответствующего маневра для избежания столкновения с пролетаемым рельефом местности притом, что выполняемый в таких случаях маневр часто является весьма сложным и в процессе этого маневра дополнительное отвлечение внимания пилота является бесполезным и даже опасным.
В общем смысле упомянутые выше щупы представляют собой участки или сектора поверхностей, ограничивающих некоторое пространство защиты перед данным самолетом от опасности столкновения с пролетаемым рельефом земной поверхности. Вертикальная форма этих щупов описана в упомянутых выше патентах.
Проекция упомянутого выше пространства на горизонтальную плоскость представляет (фиг. 9) часть сектора, располагающегося перед самолетом. На своем ближнем или "входном" конце (который располагается на уровне текущего положения самолета) этот сектор имеет конфигурируемую ширину, составляющую, например, 200 м, или, в более общем случае, ширину, изменяемую в зависимости от расчетной боковой ошибки в определении положения самолета. В боковом направлении этот сектор имеет угловое раскрытие, зависящее от одного из следующих критериев:
по одну и по другую стороны от мгновенной траектории самолета для щупа В (сигнал предупреждения);
по одну и по другую стороны от прогнозируемой траектории на соответствующий промежуток времени (например, 20 с) для щупа А (сигнал предостережения);
всякий раз на определенный угол (конфигурируемая величина, например, 1,5o), который может быть увеличен, в частности, в случае выполнения виража, на более значительную величину со стороны виража (по меньшей мере) таким образом, чтобы включить определенным образом будущую траекторию;
с ограничением максимального раскрытия, например, на уровне 90o (т.е. 2•45o), или 120o, или 180o и даже 360o для некоторых летательных аппаратов, например для вертолетов.
В качестве варианта проекция этого пространства на горизонтальную плоскость может быть систематически сформирована (фиг.3 и 4) при помощи некоторой области, центрированной вокруг прогнозируемой будущей траектории. Это может быть, например, лента, расширяемая во времени и имеющая на входе, то есть на уровне текущего положения данного самолета, конфигурируемую ширину (например, 200 м) или переменную ширину, соответствующую расчетной боковой ошибке определения пространственного положения самолета, как об этом уже было сказано выше.
Расстояние между входом и выходом или глубина упомянутого сектора может быть определена в функции скорости полета самолета или в функции каких-либо других критериев, связанных или не имеющих связи с этой скоростью. Это расстояние может также быть фиксированным.
Эта последняя проекция хорошо адаптирована к будущей траектории полета самолета, тогда как первая проекция в предпочтительном варианте реализации применима к стандартной траектории облета.
Важно отметить, что формирование предупреждающего сигнала основывается на прогнозировании будущей траектории полета летательного аппарата вместо того, чтобы систематически быть основанным на направлении мгновенной оси летательного аппарата.
Ниже рассмотрена визуализация различных степеней риска столкновения летательного аппарата с рельефом земной поверхности. Характер этой визуализации является весьма важным обстоятельством, поскольку необходимо выдать пилоту сложную информацию достаточно ясным образом.
В общем случае система в соответствии с предлагаемым изобретением представляет на экране в функции текущего положения самолета информацию относительно степени риска столкновения самолета с землей, чтобы показать экипажу этого самолета вид текущей окружающей среды. Эта информация содержит, одновременно или поочередно, в одном или в нескольких изображениях (фиг.8A-8D):
фон изображения в форме контура пересечения С1 значимых рельефов, опасных для самолета с учетом его положения в пространстве и его текущей траектории (а также с учетом выбранных критериев - к маневренным возможностям этого самолета);
визуальную информацию СРА (контур предостережения) и СА (контур предупреждения) на географических зонах, где потенциально могут быть сформированы сигналы оповещения, относящиеся к пролетаемому рельефу земной поверхности (сигналы предостережения и сигналы предупреждения);
информацию INF, относящуюся, например, к определению местоположения городов или зон аэропортов;
информацию, представляющую зоны столкновения с рельефом земной поверхности, опасные для самолета (сигнал предостережения и сигнал предупреждения в соответствии с выработанным сигналом оповещения), и преодоление которых становится затрудненным и даже невозможным.
На фиг.7А и 7В показаны случаи, когда летательный аппарат снижается. На этих схемах V представляет собой вектор скорости летательного аппарата, TF представляет собой будущую расчетную траекторию без выполнения маневра, ТРА представляет собой будущую траекторию щупа "А" (сигнал предостережения), ТРВ представляет собой будущую траекторию щупа "В" (сигнал предупреждения), которая в принципе является стандартной траекторией вертикального облета. Наклонные пунктирные линии представляют собой линии траектории LT1, LT2, LT3 и LT4, принадлежащие слоям, проходящим на секторе сканирования или обзора перед летательным аппаратом. В этом случае упомянутые слои и, следовательно, линии траектории параллельны и эквидистантны по отношению к будущей траектории TF летательного аппарата. Следует отметить, что линии траектории не являются реальными траекториями летательного аппарата. Фиг.7В отличается от фиг.7А появлением опасности на щупе ТРА вследствие того, что этот щуп пересекает рельеф земной поверхности.
Осуществляют следующие операции:
а) средство обработки информации 4, точнее модуль сканирования 400 (см. фиг. 2), устроено таким образом, чтобы обеспечить расчет вспомогательных векторов (или вспомогательных векторов скорости) путем смещения мгновенного вектора скорости летательного аппарата в соответствии с выбранным законом углового сканирования;
б) затем средство обработки определяет угловой сектор при помощи слоя линий траектории, исходящего из мгновенного вектора скорости и вспомогательных векторов.
Упомянутые выше операции а) и б) осуществляют для каждого из уровней (или слоев) линий траектории, показанных на фиг.7А и 7В, которые ограничены в вертикальной плоскости. Это служит как для определения участков контура пересечения С1, образующего фон изображения, так и для определения участков контура оповещения СРА и СА, получаемых на основе траекторий облета рельефа.
Кроме того, в случае, когда летательный аппарат выполняет вираж и/или вертикальный маневр, принимают во внимание ускорение. Таким образом, каждый сектор представляет собой кривую поверхность, сформированную семейством кривых линий, ограничивающих данный слой. Например, если летательный аппарат снижается в вертикальном направлении, угловое сканирование (в соответствии с выбранным законом этого углового сканирования) вспомогательных векторов скорости приводит к формированию сектора со строго конической поверхностью. В предпочтительном варианте реализации предлагаемого изобретения этот закон состоит в изменении угла ϕ мгновенного вектора скорости в горизонтальной плоскости при сохранении двух других сферических координат неизменными.
В данном описании "сектором полета" называют сектор, содержащий траекторию TF (фиг. 7А и 7В). Представление фона карты или изображения соответствует в любой точке реальному будущему положению летательного аппарата, каково бы ни было гипотетическое будущее положение летательного аппарата на одной из будущих траекторий, заключенных в этом секторе полета. Представление рельефа земной поверхности относится непосредственно к этому будущему положению, то есть в значениях высоты по отношению к летательному аппарату. Эта операция осуществляется модулем сравнения 401 для определения контура и модулем 402 для маркировки различных зон, разделенных участками различных контуров.
Таким образом, пилот летательного аппарата имеет в своем распоряжении контур пересечения С1 (или карту), который представляет рельеф земной поверхности в направлении вектора скорости летательного аппарата и на выбранном угловом секторе. Количество наложенных друг на друга уровней или высот индицируемого рельефа земной поверхности будет зависеть от числа слоев, используемых для пересечения с этим рельефом.
Для остальной части фон изображения и другие виды информации формируются на основе базы данных о земной поверхности.
Опасность столкновения с земной поверхностью (но не само представление рельефа земной поверхности) может быть представлена на специальном отдельном экране. В качестве предпочтительного варианта реализации рассматривают возможность использования навигационного экрана или экрана индикации метеорологической карты 55, обычно имеющегося на борту летательного аппарата.
Информация об опасности столкновения с землей передается на экран визуализации посредством специальной шины, связывающей систему GCAS с этим экраном. В предпочтительном варианте реализации эта шина представляет собой цифровую шину или шину видеосигнала, обычно используемую на борту летательного аппарата в соответствии с нормами Аринк 646 (Ethernet), Аринк 629 или Аринк 453.
Информация об опасности столкновения с землей может быть представлена различными способами:
эксклюзивным образом, исключающим представление или визуализацию какой-либо другой информации, которая обычно индицируется на имеющемся экране визуализации (в предпочтительном варианте реализации речь идет об экране индикации или визуализации метеорологической карты). В этом случае может оказаться необходимым использование специального органа выбора того или иного вида визуализации;
чередующимся образом, в сочетании с этими другими видами визуализации, например, горизонтальное представление проходимого пути одновременно с информацией об опасности столкновения с землей и, в случае необходимости, дополнительно с информацией INF о воздушном движении (например, о других летящих в данной зоне самолетах) или с информацией о местоположении зон аэропортов.
Другими словами, индикация может быть чередующейся, например, метеорологическая карта может индицироваться поочередно с картой опасностей столкновения с землей. В то же время, можно предусмотреть, чтобы карта опасностей столкновения с землей индицировалась систематически и приоритетным образом, начиная с момента формирования предупреждающего сигнала. Можно также рассматривать вариант индикации метеорологической карты и карты опасностей столкновения с землей в одно и то же время совместно с другой полезной информацией INF.
Информация, предназначенная для визуализации, преобразуется в соответствии с правилами кодирования, присущими используемой информационной шине.
Ниже более подробно будет рассмотрено визуальное представление фона изображения. В предпочтительном варианте реализации это представление визуализируется по курсу полета самолета.
Фон изображения представляет высоту рельефа земной поверхности по отношению к расчетной высоте, которую данный самолет будет иметь в каждой из рассматриваемых точек с учетом его положения и его текущей траектории (фиг.7А и 7В). Эта оценка или приближенное определение могут быть осуществлены, например, по радиальным направлениям на основе текущего положения на текущем наклоне траектории или по кривым выполняемого виража для достижения каждой из этих точек (фиг.9 и 11).
Такое представление позволяет показать потенциальные опасности столкновения летательного аппарата с рельефом земной поверхности и сделать это с учетом текущей траектории TF летательного аппарата. Только реальные опасности столкновения визуализируются и проявляются для данного наклона траектории полета, независимо от того, летит аппарат со снижением или с набором высоты, при помощи конца картинки визуализации, противоположной летательному аппарату, обеспечивая возможность реального предвидения этих опасностей. Такая визуализация осуществляется в предпочтительном варианте реализации при помощи "проекции" контура на горизонтальную плоскость.
Эта относительная высота летательного аппарата над рельефом земной поверхности представлена при помощи символов различного цвета и/или при помощи различной плотности одного и того же цвета, и/или при помощи символов различной формы (например, при помощи символов в форме "+" и/или "^", и/или "-", и/или "треугольника") в соответствии с отрезками этой относительной высоты.
Желтый или янтарный цвет в предпочтительном варианте реализации используется для индикации относительных высот, которые являются такими, что рельеф земной поверхности находится выше самолета и выше определенного запаса высоты под самолетом. Рельеф земной поверхности, располагающийся ниже определенного порогового значения (превышающего упомянутый выше запас высоты, например, 1500 футов или примерно 450 м) может вообще не подвергаться визуализации.
Фон изображения в предпочтительном варианте реализации формируется по одну и по другую стороны от курса полета самолета с указанием бокового расстояния или углового раскрытия. В направлении непосредственно перед самолетом фон изображения проходит на расстояние (в масштабе), в максимально возможной степени использующее возможности индикации данного экрана. Тем не менее, более узкая зона сканирования рассматривается временно или постоянным образом.
Зоны формирования сигналов оповещения представляют собой географические зоны, в которых сигнал предостережения и/или сигнал предупреждения могут быть сформированы, начиная с того момента, как самолет войдет в эту зону, и с учетом его текущего положения и его текущей траектории. Ниже показано, каким образом щупы А и В могут быть определены в одно и то же время.
Граница зон формируется путем сканирования в одну и в другую стороны перед данным летательным аппаратом с конфигурируемым раскрытием сектора сканирования (например, с углом раскрытия ±45o, но можно при этом предусмотреть меньшее или большее раскрытие сектора сканирования) прямой или кривой репрезентативной линии, например, радиального направления или виража, исходя из текущего положения летательного аппарата и в соответствии с текущим наклоном его траектории (полученным из вектора мгновенной скорости), и продвигая вдоль этой линии траекторию стандартного облета препятствия (или уклонения от препятствия, как это описано в упомянутом выше патенте для системы GCAS) вплоть до точки, где стандартная траектория облета пересекается с рельефом земной поверхности, в случае необходимости с некоторым запасом, фиксированным или свободным.
Чтобы ускорить расчет, запас высоты априори может быть приложен к высоте рельефа земной поверхности или к траектории или непосредственно к данному летательному аппарату. Точка RP (фиг.10) обозначает начало маневра облета.
Две точки РА и РВ, расположенные на этой линии перед точкой RP, определяют передние границы зон предостережения - точка РА и предупреждения - точка РВ соответственно (фиг.10). Эти точки в предпочтительном варианте реализации определяются в соответствии с двумя промежутками времени упреждения. Эти промежутки времени могут составлять, например, 5 с и 20 с. Можно также определить эти точки по расстоянию или каким-либо другим эквивалентным способом. Эти точки фактически определяют промежуток времени, которым теоретически располагает данный летательный аппарат для того, чтобы преодолеть расстояние, которое отделяет соответствующую точку РА или РВ от точки RP, определяющей момент начала выполнения маневра облета препятствия. Время между точками РА и РВ в настоящее время выбирается равным примерно 15 с, но может быть выбрано как меньшим, так и большим по величине.
Применяя угловое сканирование к линиям траектории одного слоя, получают переднюю часть контура выдачи сигналов оповещения, то есть ближнюю к летательному аппарату часть контура. Остается завершить этот контур некоторой задней частью вплоть до границ визуализации (или визуализируемого сектора).
Это может быть выполнено так же, как и для представления рельефа земной поверхности фоном карты или изображения. Однако в настоящее время считается предпочтительным действовать иным способом. Рассматривают две смежные линии и в том случае, когда точка RP определена на одной из этих двух линий, но не определена на другой. Оставшаяся часть контура PRO может быть продолжена назад или в направлении по полету вплоть до границ визуализации при помощи одной или другой из этих двух смежных линий (или даже при помощи обеих этих линий) с использованием предварительно определенного способа.
Следует придать этим контурам и/или зонам, которые они ограничивают, характерное или отличимое представление. Этот отличительный характер может быть обеспечен при помощи модуля маркировки 402 путем специальной маркировки типа штриховки различного типа (фиг.8А, 8В, 8С и 8D), или различных цветных символов или при помощи различных оттенков того или иного цвета, например при помощи различных оттенков серого цвета, и/или при помощи переменной плотности цвета, и/или при помощи символов различной формы для зоны сигнала предостережения и зоны сигнала предупреждения. Желтый или янтарный цвет рассматривается в качестве предпочтительного для выделения зоны выдачи сигнала предостережения и красный цвет рассматривается в качестве предпочтительного для выделения зоны сигнала предупреждения.
Зоны возможного столкновения с рельефом земной поверхности представляются (или индицируются) в том случае, когда летательный аппарат входит в зону формирования сигнала оповещения о возможности столкновения с землей. В этом случае совокупность точек земного рельефа, превышающих траекторию стандартного облета, связанную с зоной, в которую вошел летательный аппарат (зона предостережения или зона предупреждения, ограниченная контуром оповещения СРА или СА соответственно), с возможным фиксированным или свободным запасом высоты, в предпочтительном варианте реализации представляется сплошным цветом, как это схематически показано на фиг.7В.
При этом желтый или янтарный цвет в предпочтительном варианте реализации выбирается для рельефа, пересекающего траекторию стандартного облета, связанную с выдачей сигнала предостережения, и красный цвет предпочтительно выбирается для рельефа, пересекающего траекторию стандартного облета, связанную с выдачей предупреждающего сигнала.
Сектор, располагающийся позади этих точек рельефа земной поверхности, в случае необходимости дополнительно может быть окрашен таким же образом или может быть окрашен тем или иным гармонирующим цветом.
Предлагаемая система рассматривает точки будущей расчетной траектории движения летательного аппарата или смещенную копию такой будущей расчетной траектории. Эта система производит сравнение высоты "высоты летательного аппарата" на вертикали в этой точке и предполагаемого возвышения рельефа земной поверхности в этой точке, полученного из базы данных об этом рельефе. Чтобы обеспечить удовлетворительное функционирование системы в том случае, когда летательный аппарат находится близко от земли, важно, чтобы эта разность была возможно ближе к действительности.
В предпочтительном варианте реализации высота летательного аппарата, используемая в расчетах (по меньшей мере для алгоритмов формирования сигнала предупреждения, но в предпочтительном варианте реализации также и для представления рельефа земной поверхности) подкреплена величиной истинной высоты, полученной при помощи средства типа радиовысотомера. Для этого выполняются следующие действия.
Выше верхнего порога H1 (регулируемой величины) измерения радиовысотомера (например, 1500 футов или примерно 450 м) высота, используемая алгоритмами формирования сигнала предупреждения и сравниваемая с возвышением рельефа земной поверхности, полученным из базы данных, извлекается главным образом из бортовых навигационных средств летательного аппарата, например, получается от приемника радионавигационной системы GPS и/или от инерциальной или бароинерциальной системы IRS.
Ниже нижнего порога Н2 (регулируемой величины) измерения радиовысотомера (например, 500 футов, то есть примерно 150 м, или 1000 футов, то есть примерно 300 м) высота, используемая алгоритмами формирования сигнала предупреждения и сравниваемая с возвышением рельефа земной поверхности, полученного из базы данных, извлекается из величины, выдаваемой радиовысотомером и суммированной с возвышением, полученным из базы данных о рельефе земной поверхности (представляющей рельеф).
Между этими двумя пороговыми значениями H1 и Н2 высота, используемая алгоритмами формирования предупреждающего сигнала и сравниваемая с возвышением земного рельефа, полученным из базы данных, получается при помощи комбинации между высотой, полученной от бортовых навигационных средств данного летательного аппарата и радиовысотомера, например, в результате линейной интерполяции между этими двумя величинами. Это задается следующей формулой:
Прогнозируемая высота= Хх • Высота от датчиков + Yх(радиовысота + возвышение земного рельефа),
где X=(радиовысота - Н2)/(Н1-Н2) и Y=1-X.
При помощи этой величины высоты вертикальные погрешности определения положения летательного аппарата и/или определения возвышений рельефа, выдаваемых базой данных о рельефе земной поверхности, а также горизонтальные погрешности определения положения летательного аппарата, оказываются компенсированными, что позволяет используемым алгоритмам реально учитывать угрозы, связанные с фактическим рельефом пролетаемой земной поверхности, несмотря на эти погрешности.
В то же время, случается, что летательный аппарат оказывается перед таким рельефом земной поверхности, который невозможно преодолеть при использовании маневра "номинального облета". Облет таких препятствий требует не только выполнения соответствующего маневра в вертикальной плоскости, но также и бокового маневра уклонения летательного аппарата от препятствия (или выполнения виража).
Заявитель полагает, что в такой ситуации должен быть сформирован специальный предупреждающий сигнал. Этот специальный предупреждающий сигнал может состоять в специфическом указании, которое выдается пилоту в голосовой форме и/или в визуальной форме, например, "Avoid Terrain" в виде речевого сообщения и/или текстового сообщения на экране визуализации и/или при помощи зажигания специального светового сигнализатора, например красного цвета.
В общем случае этот специальный предупреждающий сигнал выдается в том случае, когда рельеф земной поверхности начинает превосходить щуп в направлении вверх на отдаленном конце щупа и/или по бокам от него или после периода блокирования алгоритмов формирования предупреждающих сигналов.
В специфическом примере следующие случаи влекут за собой формирование этого специального предупреждающего сигнала:
рельеф земной поверхности, более высокий, чем щуп на своем конце, причем этот земной рельеф не может быть преодолен без столкновения при помощи простого вертикального маневра;
рельеф земной поверхности, более высокий, чем щуп, входящий сбоку в процессе выполнения виража, при том, что время выравнивания летательного аппарата не позволяет облететь этот рельеф земной поверхности;
рельеф, превосходящий щуп на высоту, более значительную, чем вертикальный конфигурируемый порог (например, 500 футов, то есть примерно 150 м);
рельеф, превосходящий щуп, но без преодоления упомянутого выше вертикального порога, на горизонтальной боковой дистанции, превышающей конфигурируемую величину (например, 2000 м).
Сформированная таким образом система обладает всеми или по меньшей мере частью следующих характеристик:
система содержит средства, предназначенные для формирования речевого и/или визуального указания экипажу в случае возникновения ситуации, которая не может быть преодолена в результате одного маневра кабрирования или набора высоты ("pull up");
система содержит средства, предназначенные для выявления возможных опасностей не только на будущей траектории движения летательного аппарата, но также и на номинальной траектории облета препятствия;
система содержит средства, предназначенные для формирования сигналов предупреждения о возможном столкновении с рельефом земной поверхности, которые учитывают не только будущую траекторию движения летательного аппарата, но также и номинальную траекторию облета препятствия;
система содержит один или несколько щупов, открывающихся по бокам в функции глубины виража и/или степени крена таким образом, чтобы отслеживать будущую траекторию движения летательного аппарата;
система содержит один или несколько щупов, ориентированных вдоль прогнозируемой линии пути летательного аппарата и/или вдоль прогнозируемой траектории его движения и/или вдоль прогнозируемого курса;
система содержит один или несколько щупов, образованных поверхностью или областью, охватывающей прогнозируемую или расчетную траекторию;
система содержит средства визуализации, предназначенные для того, чтобы представлять фон рельефа земной поверхности, образованный относительными высотами этого рельефа с прогнозируемыми возвышениями над ним данного летательного аппарата;
система содержит средства визуализации, предназначенные для представления прогнозируемых зон формирования предупреждающих сигналов, относящихся к пролетаемому рельефу земной поверхности;
система содержит средства визуализации, предназначенные для представления зон, где опасность столкновения летательного аппарата с землей выявляется на будущей траектории его движения и/или на прогнозируемой траектории стандартного облета препятствия;
система содержит средства консолидации высоты, используемой логическими схемами выявления опасностей столкновения с землей, в частности, путем комбинирования с величиной высоты, выдаваемой радиовысотомером.
Разумеется, модуль обработки информации 4 в соответствии с предлагаемым изобретением в предпочтительном варианте реализации содержит модуль синхронизации 403, который управляет модулями сканирования 400 и визуализации 55 таким образом, чтобы обеспечить периодическое обновление индикации на основе последних измерений.
В то же время, все пороговые значения и величины, приведенные в предшествующем изложении, даны здесь лишь в качестве примера.
Строго параллельные части слоев в предпочтительном варианте реализации разнесены друг от друга в вертикальном направлении на расстояние, величина которого заключена в диапазоне от 50 футов (приблизительно 15 м) до 3000 футов (приблизительно 900 м), и в частности, в диапазоне от 100 футов (приблизительно 30 м) до 700 футов (приблизительно 210 м). Кроме того, строго параллельные части упомянутых слоев отделены друг от друга временным интервалом, величина которого заключена в диапазоне от примерно 5 с до примерно 60 с и составляет, в частности, 15 с.
Угловое сканирование осуществляется в диапазоне от 1 до 360o, в частности, в диапазоне от 60 до 120o.
Средство обработки информации устроено таким образом, чтобы осуществлять каждое пересечение с рельефом земной поверхности на дальности, соответствующей времени пролета данного летательного аппарата, по меньшей мере равного примерно 30 с, в частности, составляющего 120 с.
Средство визуализации устроено таким образом, чтобы обеспечить возможность визуализации контура по меньшей мере в направлении вектора скорости данного летательного аппарата на дальности, величина которой заключена в диапазоне от 5 морских миль (примерно 9 км) до 400 морских миль (примерно 725 км).
Критерий, выбранный для формирования и выдачи визуального и/или звукового предупреждающего сигнала, основанного на вертикальном расстоянии, отделяющем представление пересечения между рельефом земной поверхности и траекторией уклонения от вершины рельефа, располагающейся точно под пересечением этого рельефа с соответствующей траекторией уклонения, представляет собой сравнение вертикального расстояния с вертикальным пороговым значением, величина которого заключена в диапазоне от нуля до примерно 800 футов (примерно 240 м) и в предпочтительном варианте реализации, составляет примерно 500 футов (примерно 150 м). Причем предупреждающий сигнал опасности столкновения с землей включается в том случае, когда это вертикальное расстояние превышает вертикальное пороговое значение.
В качестве возможного варианта реализации этот критерий, выбранный для формирования и выдачи визуального и/или звукового предупреждающего сигнала, основанного на вертикальном расстоянии, отделяющем представление пересечения между рельефом земной поверхности и траекторией уклонения от вершины этого рельефа, располагающейся точно под точкой пересечения этого рельефа с соответствующей траекторией уклонения, представляет собой первое сравнение вертикального расстояния и величины порогового значения, заключенной в диапазоне от примерно 100 футов (примерно 30 м) до примерно 800 футов (примерно 240 м), и предпочтительно равной примерно 500 футам (примерно 150 м), сопряженное со вторым сравнением горизонтального порогового значения, выбранного определенным образом, с горизонтальным расстоянием, на котором слой, образованный соответствующими линиями траектории уклонения, пересекает данный рельеф земной поверхности. Причем сигнал предупреждения об опасности столкновения с землей включается в том случае, когда горизонтальное расстояние превышает выбранное горизонтальное пороговое значение и в то же самое время вертикальное расстояние остается меньше вертикального порогового значения.
Критерий, выбранный для формирования и выдачи визуального и/или звукового предупреждающего сигнала опасности столкновения с землей в случае пересечения между, с одной стороны, рельефом земной поверхности и по меньшей мере одной из первой и второй траекторий уклонения, а с другой стороны, между этим рельефом и по меньшей мере будущей расчетной траекторией движения летательного аппарата, представляет собой первое сравнение вертикального порогового значения, величина которого заключена в диапазоне от нуля до примерно 800 футов (примерно 250 м), с вертикальным расстоянием, отделяющим вершину данного рельефа земной поверхности строго под точкой, удаленной на выбранное горизонтальное расстояние от пересечения этого рельефа с траекторией уклонения, сопряженное с вторым сравнением между пороговой продолжительностью и промежутком времени, необходимым для выравнивания данного летательного аппарата.
Причем предупреждающий сигнал включается в том случае, когда вертикальное расстояние превышает выбранное вертикальное пороговое значение и если в то же самое время длительность выравнивания превышает пороговую продолжительность, которая заключена в диапазоне от 10 с до 150 с и предпочтительно имеет величину в диапазоне от 60 с до 120 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОЛЕТЕ НА МАЛОЙ ВЫСОТЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2095280C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |






Изобретение относится к авиационной навигации и предназначено, в частности, для предотвращения столкновения летательного аппарата с зоной, над которой он пролетает. Технический результат заключается в повышении надежности. Устройство обеспечения воздушной навигации, установленное на борту летательного аппарата, принимает на вход информацию о пространственном положении и векторе скорости и сохраняет пространственное трехмерное представление пролетаемого рельефа земной поверхности. Это устройство содержит средство обработки информации, которое определяет сектор обзора летательного аппарата и рассчитывает в этом секторе некоторый контур в функции пересечения этого сектора с пролетаемым рельефом земной поверхности для его индикации. Упомянутый сектор обзора определяется при помощи слоя линий траектории, полученных исходя из вектора скорости и вспомогательных векторов скорости, рассчитываемых при помощи смещения вектора скорости летательного аппарата в соответствии с выбранным законом углового сканирования. 2 с. и 42 з.п.ф-лы, 15 ил.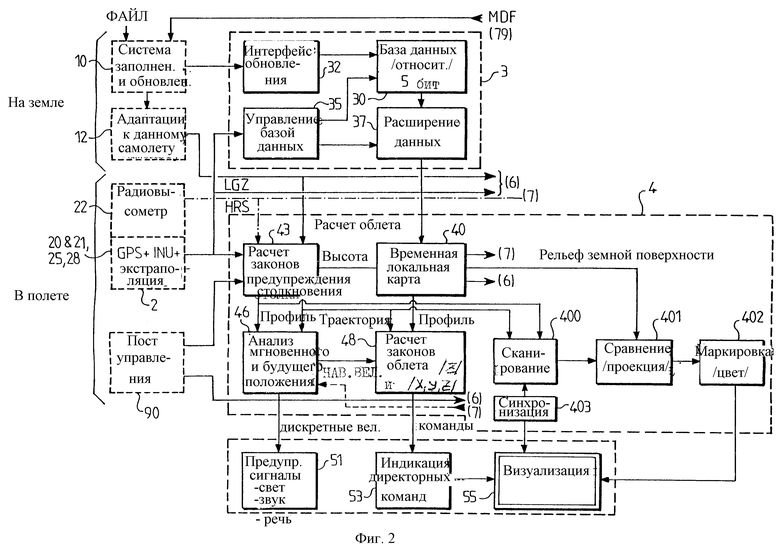
| Объемный лестничный блок | 1978 |
|
SU802469A1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ СУДОВ, ЛЕТАТЕЛЬНЫХ АППАРАТОВ И БОЛЬШЕГРУЗНЫХ АВТОМОБИЛЕЙ | 1996 |
|
RU2099745C1 |
| Устройство для сжатия сигнала по времени | 1975 |
|
SU565399A2 |
| US 5677842 А, 14.10.1997 | |||
| US 4646244 А, 24.02.1987. | |||

