Изобретение относится к устройствам управления для бортовых систем автоматического управления боковым движением нестационарного летательного аппарата (ЛА) с боковым горизонтальным рулевым оперением.
Известны устройства управления для систем, в которых каналы управления креном и курсом содержат элементы вычитания и суммирующие усилители, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на исполнительные приводы ЛА [1].
Недостатками такой реализации являются ограниченные возможности управления и невысокая статическая и динамическая точность.
Наиболее близким к предлагаемому изобретению является адаптивное устройство управления летательным аппаратом, содержащее инвертирующий усилитель, последовательно соединенные датчик угловой скорости по крену и первый суммирующий усилитель, последовательно соединенные задатчик сигнала управления по курсу, первый блок вычитания и второй суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости по курсу, последовательно соединенные датчик угла крена и второй блок вычитания, выход которого соединен со вторым входом первого суммирующего усилителя, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания, последовательно соединенные датчик скоростного напора и функциональный нелинейный элемент с управляемым ограничением, второй вход которого соединен с выходом инвертирующего усилителя, а выход - со вторым входом второго блока вычитания, нелинейный элемент с ограничением, вход которого соединен с выходом первого суммирующего усилителя, а выход является выходом устройства, при этом выход второго суммирующего усилителя соединен со входом инвертирующего усилителя [2].
Недостатками известного устройства являются ограниченные функциональные возможности и невысокая статическая и динамическая точность управления в нестационарных условиях применения летательного аппарата - при переменной скорости и высоте полета.
Решаемой в предложенном устройстве управления технической задачей является расширение функциональных возможностей и повышение статической и динамической точности управления в условиях существенной нестационарности ЛА. Предложенным построением устройства управления достигается функциональная возможность повышения интенсивности управления и увеличение статической и динамической точности при изменяющихся скорости и высоте полета летательного аппарата с двумя рулями в широких пределах.
Указанный технический результат достигается тем, что в известное устройство управления ЛА, содержащее инвертирующий усилитель, последовательно соединенные датчик угловой скорости по крену и первый суммирующий усилитель, последовательно соединенные задатчик сигнала управления по курсу, первый блок вычитания и второй суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости по курсу, последовательно соединенные датчик угла крена и второй блок вычитания, выход которого соединен со вторым входом первого суммирующего усилителя, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания, последовательно соединенные первый датчик угла крена и второй блок вычитания, выход которого соединен с первым суммирующим усилителем, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания, последовательно соединенные датчик скоростного напора и первый функциональный нелинейный элемент с управляемым ограничением, второй вход которого соединен с выходом инвертирующего усилителя, а выход - со вторым входом второго блока вычитания, нелинейный элемент с ограничением, вход которого соединен с выходом первого суммирующего усилителя, а выход является выходом устройства, при этом выход второго суммирующего усилителя соединен со входом инвертирующего усилителя, дополнительно введены последовательно соединенные нелинейный элемент с зоной нечувствительности, вход которого соединен с выходом первого блока вычитания, усилитель и второй функциональный нелинейный элемент с управляемым ограничением, выход которого соединен с третьим входом первого суммирующего усилителя, а второй вход с выходом датчика скоростного напора, при этом третий вход первого и второго суммирующих усилителей соединен с выходом датчика скоростного напора.
Действительно, при этом обеспечивается форсированная отработка сигналов по курсу посредством маневров по крену с учетом изменяющихся условий нестационарности ЛА и уровня отрабатываемых воздействий.
На чертеже представлена блок-схема модернизированного адаптивного устройства координированного управления летательным аппаратом.
Устройство управления содержит инвертирующий усилитель 1 (ИУ), последовательно соединенные датчик угловой скорости по крену 2 (ДУСКр) и первый суммирующий усилитель 3 (1СУ), последовательно соединенные задатчик сигнала управления по курсу 4 (ЗСУКур), первый блок вычитания 5 (1БВ) и второй суммирующий усилитель 6 (2СУ), второй вход которого соединен с выходом датчика угловой скорости по курсу 7 (ДУСКур), последовательно соединенные датчик угла крена 8 (ДУКр) и второй блок вычитания 9 (2БВ), выход которого соединен со вторым входом первого суммирующего усилителя 3, датчик угла курса 10 (ДУКур), выход которого соединен со вторым входом первого блока вычитания 5, последовательно соединенные датчик скоростного напора 11 (ДСН) и первый функциональный нелинейный элемент с управляемым ограничением 12 (1ФНЭУО), второй вход которого соединен с выходом инвертирующего усилителя 1, а выход - со вторым входом второго блока вычитания 9, нелинейный элемент с ограничением 13 (НЭО), вход которого соединен с выходом первого суммирующего усилителя 3, а выход является выходом устройства, при этом выход второго суммирующего усилителя 6 соединен со входом инвертирующего усилителя 1. Эти звенья образуют первый, основной канал. Кроме того, устройство также содержит последовательно соединенные нелинейный элемент с зоной нечувствительности 14 (НЭЗН), вход которого соединен с выходом первого блока вычитания 5, усилитель 15 (У) и второй функциональный нелинейный элемент с управляемым ограничением 16 (2ФНЭУО), выход которого соединен с третьим входом первого суммирующего усилителя 3, а второй вход с выходом датчика скоростного напора 11. Эти звенья образуют второй, форсирующий канал. Канал адаптации передаточных чисел сформирован введением соединений датчика скоростного напора 11 с усилителями 3 и 6.
Устройство управления работает следующим образом.
Основные сигналы управления в каналах курса σψ и крена δγ формируются, соответственно, блоками 4, 5, 6, 7, 10 канала курса и 1, 2, 3, 8, 9, 12 канала крена:
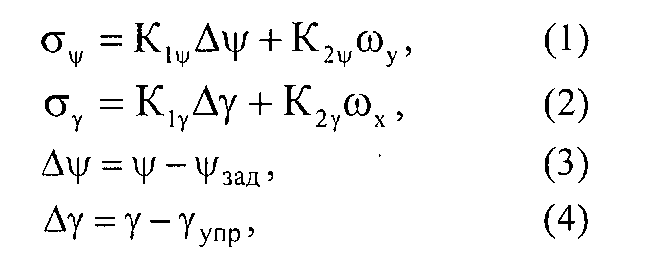
где K1ψ, K2ψ - передаточные коэффициенты второго усилителя 6;
Δψ - сигнал рассогласования по курсу на выходе первого блока вычитания 5;
ψ - сигнал датчика угла курса 10;
ψзад. - задающий сигнал по курсу на выходе задатчика сигнала управления по курсу 4;
ωy - сигнал датчика угловой скорости по курсу 7;
K1γ, K2γ - передаточные коэффициенты первого усилителя 3;
Δγ - сигнал рассогласования по крену на выходе второго блока вычитания 9;
γ - сигнал датчика угла крена 8;
γупр. - управляющий сигнал по крену на выходе первого функционального нелинейного элемента с управляемым ограничением А 12;
ωx - сигнал датчика угловой скорости по крену 2.
Сигнал γупр. формируется блоками 1 и 12. Блок 1 подключен входом по сигналу σψ к выходу второго суммирующего усилителя 6. Выход блока 12 подключен ко входу второго блока вычитания 9.
Устройство управления работает в режиме стабилизации и управления сигналов ψзад через основной канал, сочетающий последовательно соединенные каналы курса и крена, и дополнительный (второй) форсирующий канал, состоящий из блоков 14, 15, 16 и формирующий дополнительную компоненту Δσγ в непосредственной функции от сигнала Δψ, именно:
1. Малые сигналы в пределах ±ε, выставляемые в блоке 14, отрабатываются основным каналом координированного управления для режима стабилизации, определяющего значения сигнала Δψ вблизи нуля. При этом величина ε соответствует (0,05-0,1) диапазона штатно-номинальных значений Δψ в пределах ±A. Таким образом, дополнительный сигнал Δσγ=0, и сигнал σγ определяется в соответствии с (2).
2. Сигналы Δψ в пределах
отрабатываются совместно основным каналом и дополнительным. Последний имеет собственное ограничение B, составляющее B=(0,1÷0,4)A.
Для этого случая в основной сигнал управления по крену по (2) добавляется сигнал с блока 16 Δσγ, т.е.

В усилителе 15 сигнал с блока 14 усиливается.
3. Сигнал Δσγ при |Δσγ|>B соответствует значению B, выставленному в блоке 16. В этом случае 
При отработке сигналов ψзад канал курса формирует сигнал σψ, а канал крена - в режиме координированного управления с отработкой сигнала γупр≠0 и с инвертированием на усилителе 1 и дальнейшим функциональным ограничением A полученного сигнала в блоке 12. Второй функциональный нелинейный элемент 16 с управляемым ограничением A обеспечивает требуемое ограничение сигнала, поступающего с блока 15. Ограничения в блоках 12 и 16 и передаточные коэффициенты K1ψ, K2ψ, K1γ, K2γ в блоках 3 и 6 определены в функциональной зависимости от скоростного напора q, поступающего от датчика 11, обеспечивая адаптивную перестройку в условиях нестационарности ЛА. Нелинейный элемент с ограничением 13 обеспечивает выполнение ограничения выходного сигнала канала крена σγ для подачи на рулевые приводы летательного аппарата в виде 
Необходимость в варьировании ограничений блоков 12 и 16 в функции скоростного напора q может быть пояснена следующим образом.
Действительно, в соответствии, например, с [3] угол курса ψ летательного аппарата в координированном движении связан с углом крена γ интегральной зависимостью

где коэффициент Kγ имеет вид

где g - ускорение свободного падения;
m - масса летательного аппарата;
s - характерная площадь летательного аппарата;
ϑ - угол тангажа;
q - скоростной напор.
Таким образом, зависимость (9) можно записать

где 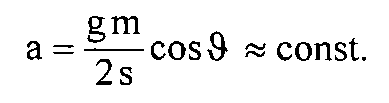
Тогда уравнение (8) примет вид

приняв с точностью до динамики γ≈γупр, получим

Изменение высоты и скорости определяется для анализа и построения устройства управления величиной скоростного напора q.
Для сохранения стабильности соотношения

в блоке 12 вводится прямо пропорциональное изменение уровня ограничения γупр в функции от q. Аналогично определена и зависимость Δσγ(q).
Все блоки устройства управления являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, например, по [4, 5].
Таким образом, предложенное модернизированное адаптивное устройство координированного управления летательным аппаратом позволяет расширить функциональные возможности устройства в условиях изменения задающих воздействий в широких пределах и повысить статическую и динамическую точность управления.
Источники информации
1. И.А. Михалев и др. Системы автоматического управления самолетом. М.: Машиностроение, 1987 г., с.174.
2. Патент РФ №2367993 от 20.09.2009 г., МПК G05D 1/00.
3. В.А. Боднер. Теория автоматического управления полетом. М.: Наука, 1964, с. 113÷117 и с.42.
4. В.Б. Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.22, 41.
5. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.107, 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367993C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2532720C1 |
| Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления | 2016 |
|
RU2631736C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367992C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2237269C1 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2238582C1 |
| Автопилот | 1990 |
|
SU1802357A1 |
Изобретение относится к устройствам управления для бортовых систем автоматического управления летательными аппаратами. Техническим результатом изобретения является повышение динамической точности управления. Устройство управления содержит датчик угла крена, датчик угловой скорости по крену, датчик угла курса, датчик угловой скорости по курсу, датчик скоростного напора, первый и второй суммирующие усилители, задатчик сигнала управления по курсу, первый и второй блоки вычитания, инвертирующий усилитель, первый и второй функциональные нелинейные элементы с управляемым ограничением, нелинейный элемент с ограничением, нелинейный элемент с зоной нечувствительности и усилитель. 1 ил.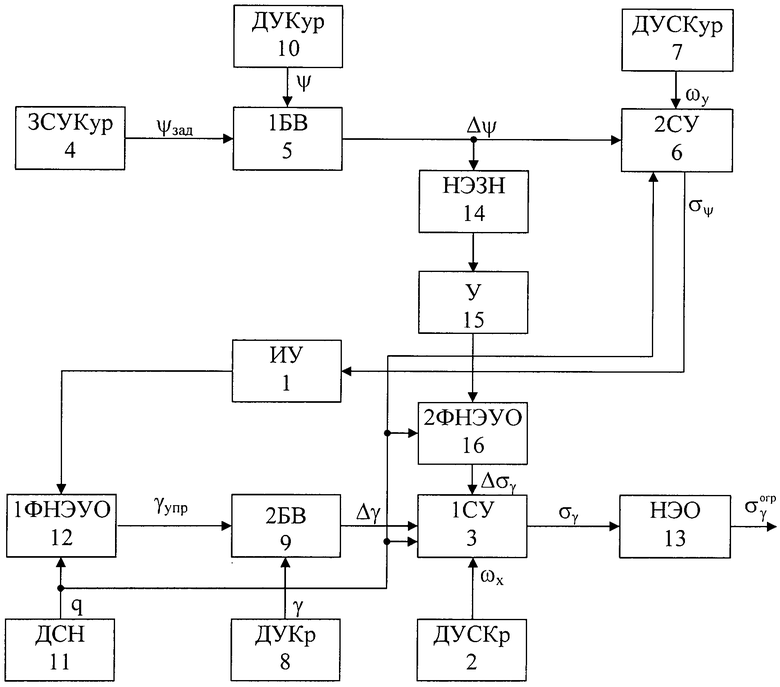
Модернизированное адаптивное устройство координированного управления летательным аппаратом, содержащее инвертирующий усилитель, последовательно соединенные датчик угловой скорости по крену и первый суммирующий усилитель, последовательно соединенные задатчик сигнала управления по курсу, первый блок вычитания и второй суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости по курсу, последовательно соединенные датчик угла крена и второй блок вычитания, выход которого соединен со вторым входом первого суммирующего усилителя, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания, последовательно соединенные датчик скоростного напора и первый функциональный нелинейный элемент с управляемым ограничением, второй вход которого соединен с выходом инвертирующего усилителя, а выход - со вторым входом второго блока вычитания, нелинейный элемент с ограничением, вход которого соединен с выходом первого суммирующего усилителя, а выход является выходом устройства, при этом выход второго суммирующего усилителя соединен со входом инвертирующего усилителя, отличающееся тем, что оно содержит последовательно соединенные нелинейный элемент с зоной нечувствительности, вход которого соединен с выходом первого блока вычитания, усилитель и второй функциональный нелинейный элемент с управляемым ограничением, выход которого соединен с третьим входом первого суммирующего усилителя, а второй вход с выходом датчика скоростного напора, при этом третий вход первого и второго суммирующих усилителей соединен с выходом датчика скоростного напора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| CN 102176160 A, 07.09.2011 | |||

