Область техники, к которой относится изобретение
Настоящее изобретение относится к фотографирующему аппарату, такому как аппарат, представляющий собой фотокамеру для контроля и наблюдения, или аппарату, представляющему собой видеокамеру, а более конкретно к аппарату привода устройства для съема сигнала, предназначенному для перемещения устройства для съема сигнала в направлении оптической оси, фотографирующему аппарату, в котором используется такой аппарат привода, и аппарату типа фотокамеры для контроля и наблюдения.
Предшествующий уровень техники
Прежде всего будет описан обычный фотографирующий аппарат. В качестве примера фотографирующего аппарата будет описан аппарат, представляющий собой фотокамеру для контроля и наблюдения.
В течение последних лет разработана технология, связанная с различными аппаратами, представляющими собой фотокамеры для контроля и наблюдения. В частности, в аппарате, представляющем собой фотокамеру для контроля и наблюдения и предназначенном для осуществления операции контроля и наблюдения днем и ночью, предложена технология, в соответствии с которой днем светофильтр с ограниченной полосой пропускания в области инфракрасного света, предназначенный для избирательной передачи видимого света и поглощения инфракрасного света, устанавливают на передней поверхности устройства для съема сигнала и проводят фотографирование, а ночью светофильтр с ограниченной полосой пропускания в области инфракрасного света снимают с передней поверхности устройства для съема сигнала и проводят фотографирование с использованием инфракрасного света, вследствие чего повышаются чувствительность фотографирования и точность контроля и наблюдения ночью.
Когда в таком аппарате, представляющем собой фотокамеру контроля и наблюдения, фотографирование проводят с использованием видимого света или когда фотографирование проводят с использованием инфракрасного света, длина оптического пути изменяется в зависимости от присутствия светофильтра с ограниченной полосой пропускания в области инфракрасного света. Соответственно, если длину оптического пути задают равной оптимальной длине при фотографировании с использованием видимого света, сфотографированное изображение оказывается не в фокусе, когда фотографирование с использованием видимого света и инфракрасного света проводят ночью.
Чтобы решить эту проблему, был предложен, например, аппарат, представляющий собой фотокамеру контроля и наблюдения, выполненный с возможностью автоматического перемещения устройства для съема сигнала в направлении оптической оси при установке и снятии светофильтра с ограниченной полосой пропускания в области инфракрасного света, а также с возможностью коррекции разности между длинами оптического пути при фотографировании с использованием видимого света и инфракрасного света, что позволяет получать резкое изображение днем и ночью (см., например, не проходившую экспертизу японскую патентную публикацию № 2003-274229).
В таком аппарате, представляющем собой фотокамеру для контроля и наблюдения, используется ходовой винт для перемещения устройства для съема сигнала, а это устройство для съема сигнала крепится к гайке, которая установлена с возможностью вращения на ходовой винт таким образом, что ходовой винт вращается за счет вращения шагового электродвигателя. Вследствие этой конфигурации, поскольку ходовой винт вращается за счет вращения шагового электродвигателя, устройство для съема сигнала можно перемещать на желательное расстояние в направлении оптической оси.
Однако в вышеописанном аппарате, представляющем собой фотокамеру для контроля и наблюдения, устройство для съема сигнала перемещается за счет вращения ходового винта относительно неподвижной гайки устройства для съема сигнала. Ввиду этого оказывается возможным возникновение механического перемещения между гайкой и ходовым винтом. В частности, даже когда перемещение устройства для съема сигнала невелико, линейность расстояния перемещения устройства для съема сигнала ухудшается из-за вращения ходового винта, вследствие чего снижается точность привода.
Краткое изложение сущности изобретения
Задача настоящего изобретения состоит в том, чтобы разработать устройство для съема сигнала, запуск которого осуществляется с высокой точностью даже при небольшом перемещении, фотографирующий аппарат, в котором используется такой привод, и аппарат, представляющий собой фотокамеру для контроля и наблюдения.
В соответствии с одним аспектом настоящего изобретения предложен аппарат привода устройства для съема сигнала, включающий в себя: основание, положение которого фиксировано относительно части объектива; подвижную часть, которая предусмотрена обращенной к основанию; устройство для съема сигнала, которое прикреплено к подвижной части в состоянии, в котором поверхность съема сигнала перпендикулярна направлению оптической оси; первую опорную часть и вторую опорную часть, которые предусмотрены между основанием и подвижной частью и служат подвижной части опорой; первую поворотную часть, которая предусмотрена между основанием и первой опорной частью; вторую поворотную часть, которая предусмотрена между основанием и второй опорной частью в положении, в котором она параллельно перемещена от первой поворотной части в направлении оптической оси; третью поворотную часть, которая предусмотрена между подвижной частью и первой опорной частью; четвертую поворотную часть, которая предусмотрена между подвижной частью и второй опорной частью в положении, в котором она образует вершину параллелограмма относительно первой поворотной части, второй поворотной части и третьей поворотной части; и приводную часть, которая изменяет положение устройства для съема сигнала относительно части объектива, причем центральные оси поворота первой поворотной части, второй поворотной части, третьей поворотной части и четвертой поворотной части перпендикулярны направлению оптической оси и параллельны друг другу, и при этом положение устройства для съема сигнала относительно части объектива изменяется в состоянии, в котором первая поворотная часть, вторая поворотная часть, третья поворотная часть и четвертая поворотная часть образуют вершины параллелограмма.
Посредством этой конфигурации подвижная часть поддерживается четырьмя поворотными частями, центральные оси поворота которых перпендикулярны направлению оптической оси, и обеспечивается расположение одной стороны у вершины параллелограмма параллельно направлению оптической оси. Соответственно, поскольку устройство для съема сигнала может перемещаться в направлении оптической оси части объектива за счет простой конфигурации, при наличии которой устройство для съема сигнала прикреплено к подвижной части в состоянии, в котором поверхность съема сигнала перпендикулярна направлению оптической оси, можно подавить осуществление механического перемещения из-за использования ходового винта и гайки. Даже при небольшом перемещении становится возможной реализация аппарата привода устройства для съема сигнала с высокой точностью приведения в действие.
Первая опорная часть может быть соединена с возможностью поворота с основанием посредством первой точки ответвления и соединена с возможностью поворота с подвижной частью посредством второй точки ответвления, а первая точка ответвления и вторая точка ответвления могут образовывать плоскость, вторая опорная часть может быть соединена с возможностью поворота с подвижной частью и основанием, первая поворотная часть может соединять основание с первой опорной частью в первой точке ответвления, а третья поворотная часть может соединять подвижную часть с первой опорной частью во второй точке ответвления.
Посредством этой конфигурации, поскольку первая опорная часть поддерживает основание и подвижную часть с помощью точек ответвления, а эти точки ответвления поддерживаются расположенными на плоскости, можно предотвратить создание пространственного искажения, когда положение устройства для съема сигнала изменяется в направлении оптической оси, а также можно предотвратить образование погрешности наклона (так называемого плоскостного заедания) поверхности съема сигнала.
По меньшей мере, одна из первой поворотной части, второй поворотной части, третьей поворотной части и четвертой поворотной части может быть пластинчатой пружиной.
Посредством этой конфигурации, поскольку механическое перемещение или трение не создается в пластинчатой пружине, являющейся одной из поворотных частей, соединенных с соответствующим элементом, можно подавить образование гистерезиса. Кроме того, становится возможной реализация конфигурации с высокой точностью приведения в действие.
Первая поворотная часть, вторая поворотная часть, третья поворотная часть и четвертая поворотная часть могут быть пластинчатыми пружинами.
Посредством этой конфигурации, поскольку поворотные части, соединенные с соответствующим элементом, являются пластинчатыми пружинами, механическое перемещение или трение не создается. Соответственно, создается возможность подавить образования гистерезиса. Кроме того, становится возможной реализация конфигурации с более высокой точностью приведения в действие.
Подвижная часть, первая опорная часть, вторая опорная часть и пластинчатая пружина могут быть выполнены как единое целое, а, по меньшей мере, одна из подвижной части, первой опорной части и второй опорной части может иметь усиливающую накладку для увеличения жесткости.
Посредством этой конфигурации, поскольку подвижная первая опорная часть, вторая опорная часть и пластинчатая пружина могут быть выполнены как единый элемент, становится возможной реализация простой конфигурации. Кроме того, поскольку, по меньшей мере, одна из первой опорной части и второй опорной части имеет усиливающую накладку, становится возможной реализация конфигурации, обладающей необходимой жесткостью.
По меньшей мере, одна из первой поворотной части, второй поворотной части, третьей поворотной части и четвертой поворотной части может быть шарнирной частью.
Посредством этой конфигурации, поскольку механическая прочность шарнирной части, являющейся одной из поворотных частей, соединенных с соответствующими элементами, может увеличиваться, становится возможной реализация конфигурации, обладающей повышенным сопротивлением удару.
Первая поворотная часть, вторая поворотная часть, третья поворотная часть и четвертая поворотная часть могут быть шарнирными частями.
Посредством этой конфигурации, поскольку поворотные части, соединенные с соответствующими элементами, являются шарнирными частями, можно увеличить механическую прочность. Таким образом, становится возможной реализация конфигурации, обладающей повышенным сопротивлением удару.
Между первой опорной частью и второй опорной частью может быть предусмотрена упругая часть.
Посредством этой конфигурации становится возможным получение конфигурации, которая может подавлять создание механического перемещения в шарнирной части.
В состав рассматриваемого аппарата может быть включена часть для нажатия на подвижную часть в предварительно определенном направлении, а приводная часть может уменьшать силу нажатия, прикладываемую к подвижной части нажимающей частью, для приведения в действие подвижной части.
Посредством этой конфигурации, поскольку на подвижную часть уже оказано нажатие в предварительно определенном направлении, становится возможной реализация конфигурации, которая обладает превосходным сопротивлением удару и может лучше подавлять возникающий гистерезис.
В соответствии с еще одним аспектом настоящего изобретения предложен фотографирующий аппарат, включающий в себя: часть объектива; аппарат привода устройства для съема сигнала согласно настоящему изобретению; и часть, обрабатывающую сигнал изображения, которая проводит обработку сигнала изображения, делая это с сигналом, выдаваемым из устройства для съема сигнала, которое имеется в аппарате привода устройства для съема сигнала.
Посредством этой конфигурации подвижная часть поддерживается четырьмя поворотными частями, центральные оси поворота которых перпендикулярны направлению оптической оси, и обеспечивается расположение одной стороны у вершины параллелограмма параллельно направлению оптической оси. Соответственно, поскольку устройство для съема сигнала может перемещаться в направлении оптической оси части объектива за счет простой конфигурации, при наличии которой устройство для съема сигнала прикреплено к подвижной части в состоянии, в котором поверхность съема сигнала перпендикулярна направлению оптической оси, можно подавить осуществление механического перемещения из-за использования ходового винта и гайки. Даже при небольшом перемещении становится возможной реализация фотографирующего аппарата, включающего аппарат привода устройства для съема сигнала с высокой точностью приведения в действие, вследствие чего можно проводить фотографирование с получением резких изображений.
В состав рассматриваемого аппарата могут быть включены часть, вычисляющая величину смещения, которая вычисляет величину смещения устройства для съема сигнала в направлении, перпендикулярном направлению оптической оси, и корректирующая часть, которая корректирует сигнал изображения, обработанный частью, обрабатывающей сигнал изображения, на основании величины смещения устройства для съема изображения, вычисленной частью, вычисляющей величину смещения, в направлении, перпендикулярном направлению оптической оси.
Посредством этой конфигурации становится возможной реализация фотографирующего аппарата, который выполнен с возможностью коррекции перемещения устройства для съема сигнала в направлении, перпендикулярном направлению оптической оси, путем установки аппарата привода устройства для съема сигнала в соответствии с настоящим изобретением.
В соответствии с еще одним аспектом настоящего изобретения предложен аппарат, представляющий собой фотокамеру для контроля и наблюдения, включающий в себя: часть объектива; аппарат привода устройства для съема сигнала согласно настоящему изобретению; часть, обнаруживающую изменение интенсивности освещения, которая обнаруживает изменение интенсивности освещения; часть светофильтра, которая обеспечивает прикрепление и открепление светофильтра с ограниченной частотой пропускания в области инфракрасного света на оптической оси части объектива в зависимости от изменения интенсивности освещения, обнаруживаемого частью, обнаруживающей изменение интенсивности освещения; и управляющую часть, которая обеспечивает приведение в движение приводной части устройства для съема сигнала, которое имеется в аппарате привода устройства для съема сигнала, когда прикрепляют и открепляют светофильтр с ограниченной частотой пропускания в области инфракрасного света, имеющийся в части светофильтра.
Посредством этой конфигурации, поскольку устройство для съема сигнала может перемещаться в направлении оптической оси части объектива за счет простой конфигурации, при наличии которой устройство для съема сигнала прикреплено к подвижной части в состоянии, в котором поверхность съема сигнала перпендикулярна направлению оптической оси, можно подавить осуществление механического перемещения из-за использования ходового винта и гайки. Даже при небольшом перемещении становится возможной реализация аппарата привода устройства для съема сигнала с высокой точностью приведения в действие, вследствие чего можно проводить фотографирование вне зависимости от яркости окружающей среды.
Как описано выше, становится возможной разработка аппарата привода устройства для съема сигнала с высокой точностью приведения в действие даже при небольшом перемещении фотографирующего аппарата, в котором используется такой аппарат привода, и аппарата, представляющего собой фотокамеру для контроля и наблюдения.
Краткое описание чертежей
На Фиг.1 показана конфигурация фотографирующего аппарата, соответствующего варианту осуществления настоящего изобретения;
на Фиг.2 представлено перспективное изображение с пространственным разделением деталей, иллюстрирующее конфигурацию аппарата привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения;
на Фиг.3А показан аппарат привода устройства для съема сигнала, соответствующий варианту осуществления настоящего изобретения, в случае рассмотрения этого аппарата со стороны части объектива;
на Фиг.3В показан аппарат привода устройства для съема сигнала, соответствующий варианту осуществления настоящего изобретения, в случае рассмотрения этого аппарата со стороны линейного исполнительного механизма;
На Фиг.4А представлен вид в плане, иллюстрирующий конфигурацию приводной части аппарата привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения;
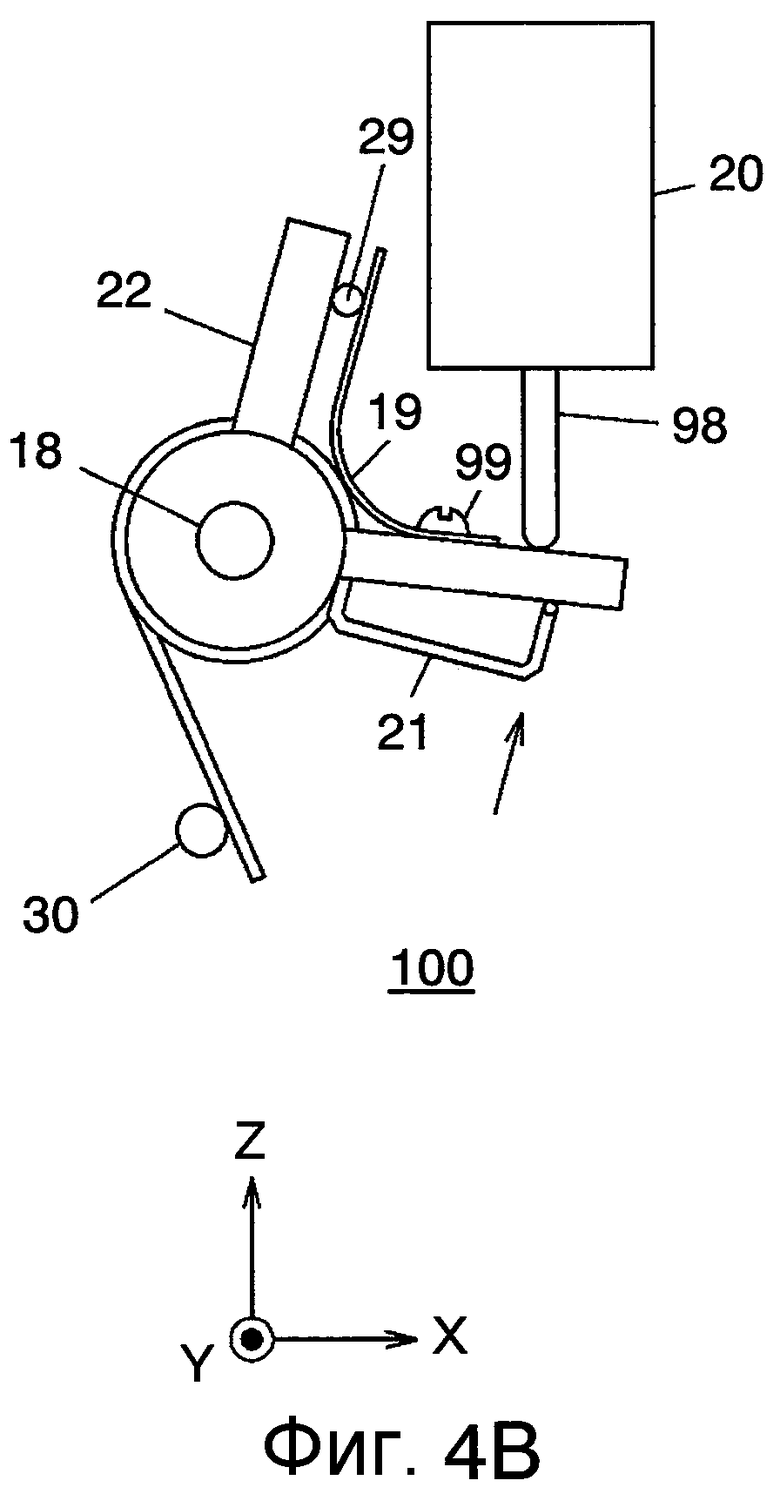
на Фиг.4В показано состояние приводной части аппарата привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения, когда увеличивается сила нажима линейного исполнительного механизма;
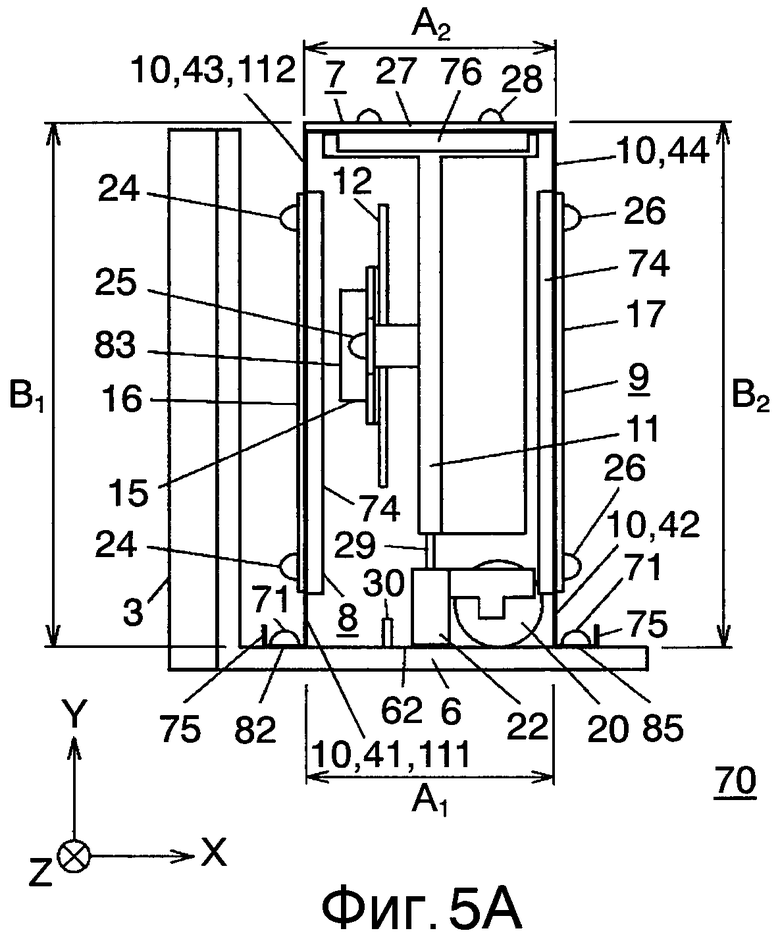
на Фиг.5А представлен вид сбоку, иллюстрирующий пример работы аппарата привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения;
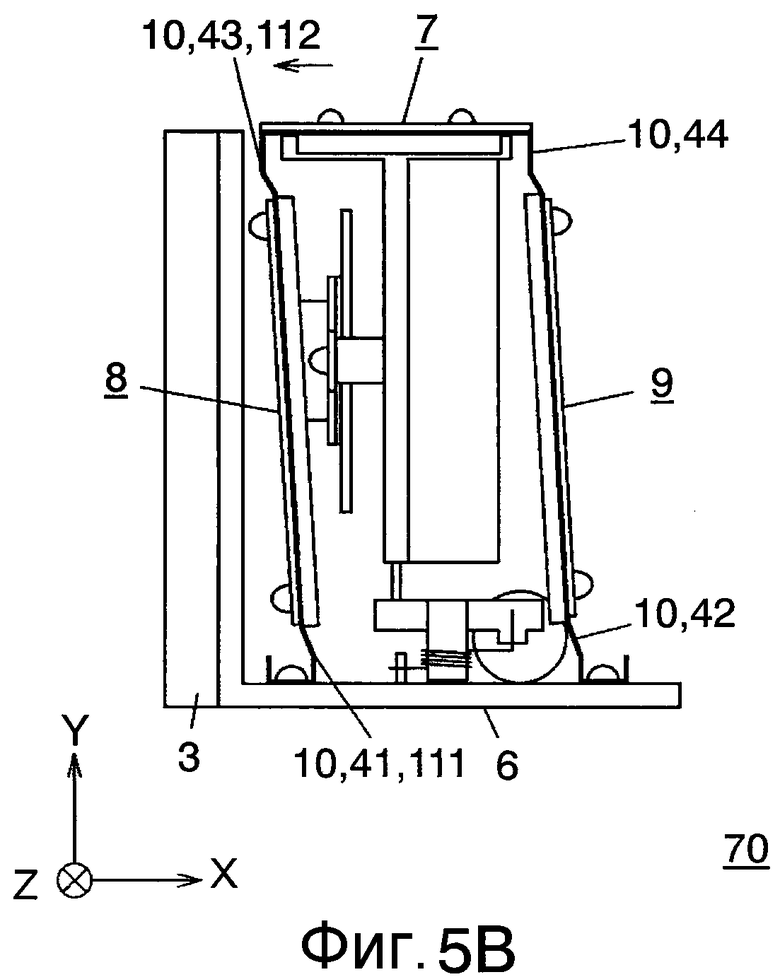
на Фиг.5В представлен вид сбоку, иллюстрирующий пример состояния, когда изменяется положение устройства для съема сигнала аппарата привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения;
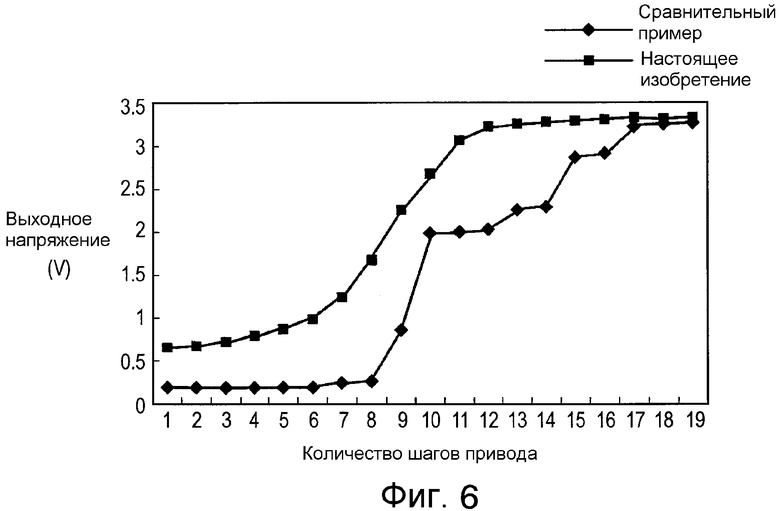
на Фиг.6 показаны характеристики линейности аппарата привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения, и характеристики линейности согласно сравнительному примеру;
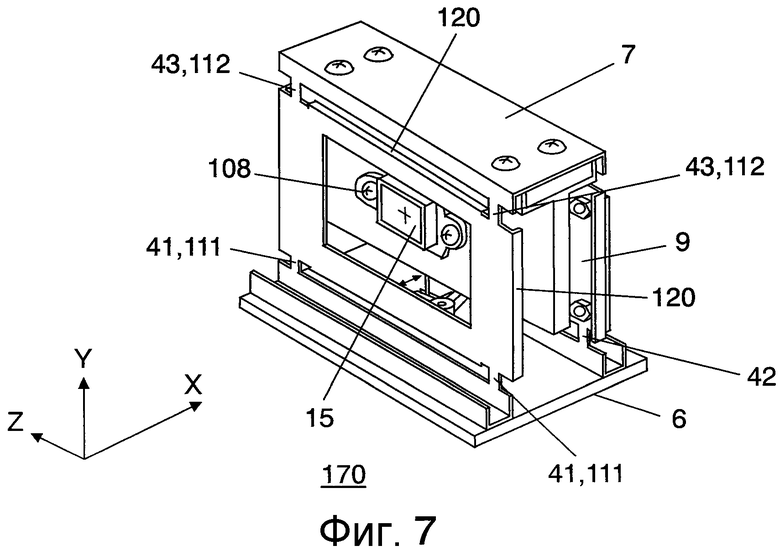
на Фиг.7 представлено перспективное изображение, иллюстрирующее конфигурацию аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения;
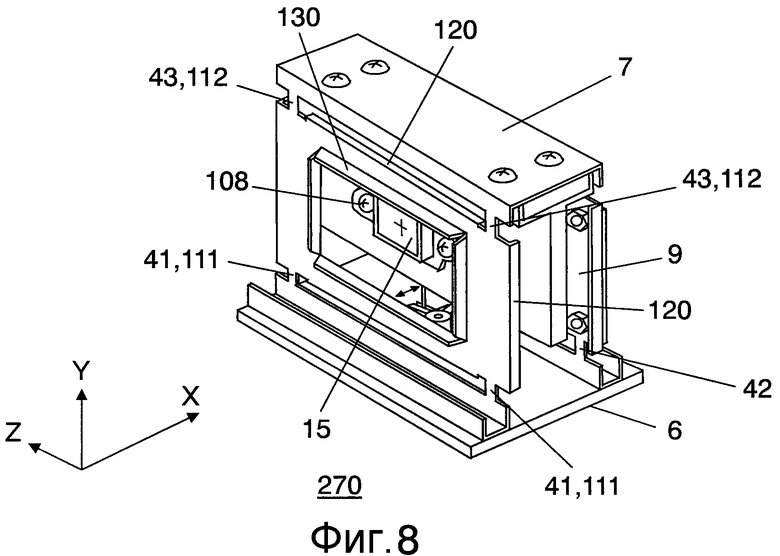
на Фиг.8 показана конфигурация аппарата привода устройства для съема сигнала, предусматривающая использование первой планарной опорной части в соответствии с вариантом осуществления настоящего изобретения;
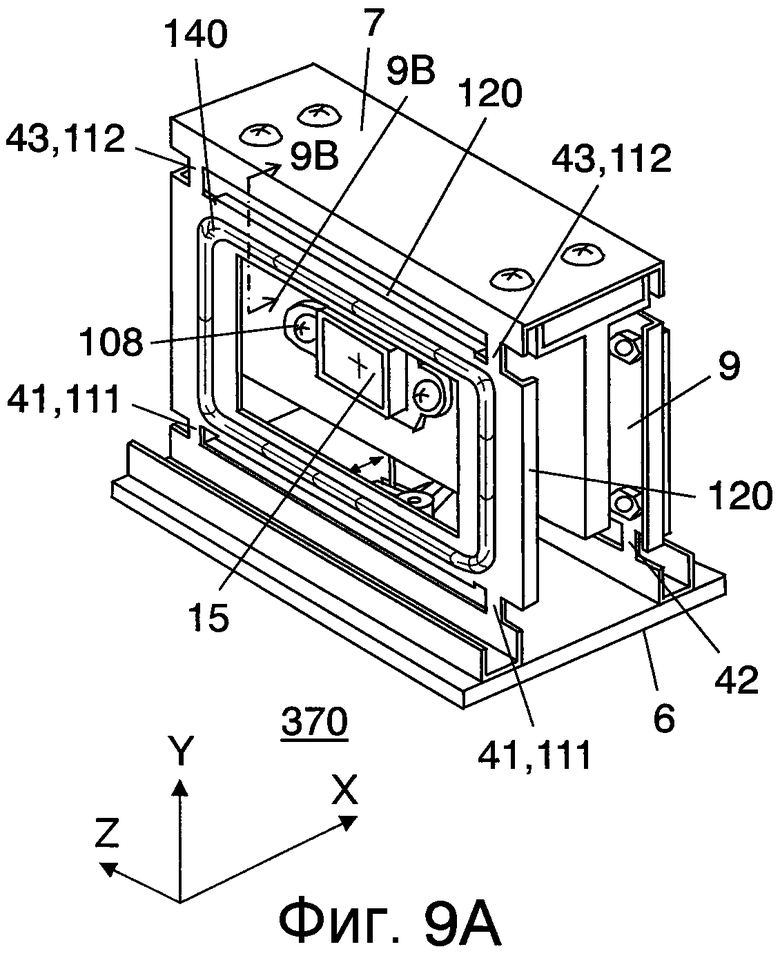
на Фиг.9А показана конфигурация аппарата привода устройства для съема сигнала, предусматривающая использование первой планарной опорной части в соответствии с вариантом осуществления настоящего изобретения;
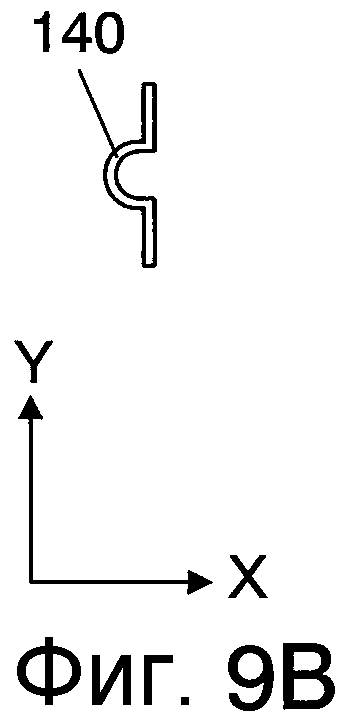
на Фиг.9В показана конфигурация аппарата привода устройства для съема сигнала, предусматривающая использование первой планарной опорной части в соответствии с вариантом осуществления настоящего изобретения;
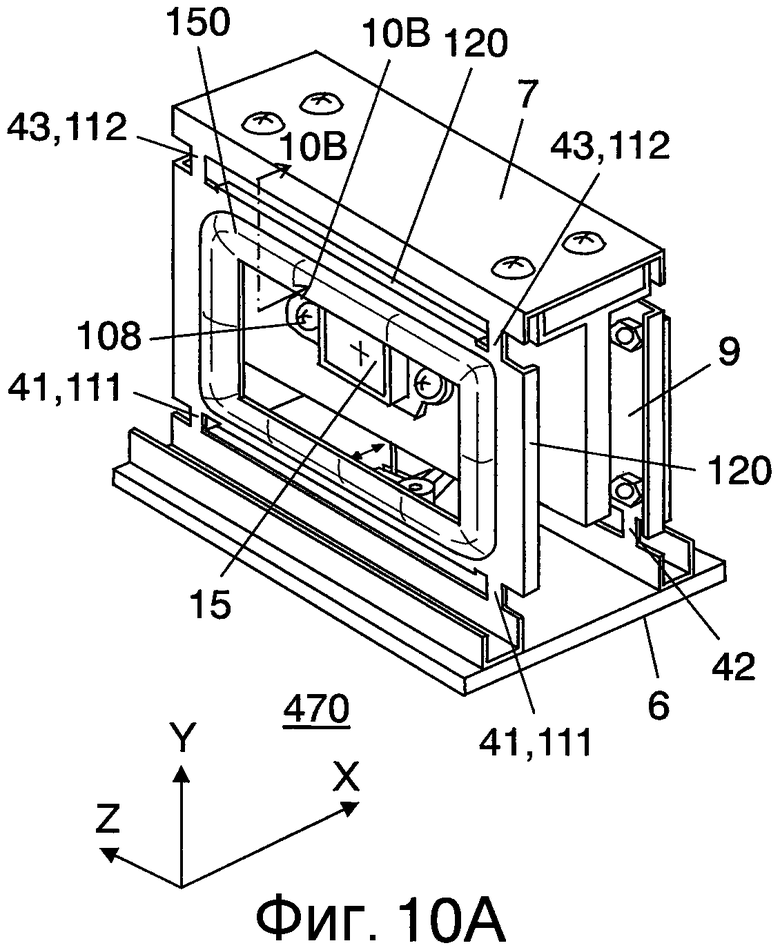
на Фиг.10А показана конфигурация аппарата привода устройства для съема сигнала, предусматривающая использование первой планарной опорной части в соответствии с вариантом осуществления настоящего изобретения;
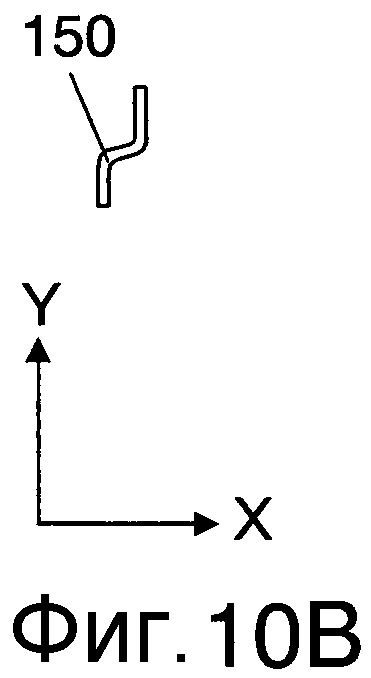
на Фиг.10В показана конфигурация аппарата привода устройства для съема сигнала, предусматривающая использование первой планарной опорной части в соответствии с вариантом осуществления настоящего изобретения;
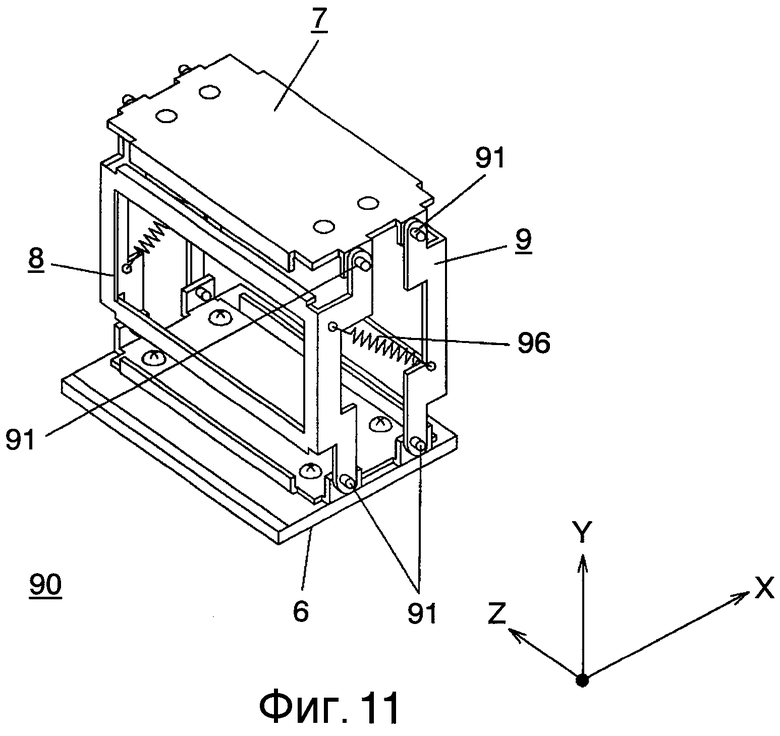
на Фиг.11 показана конфигурация аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения;
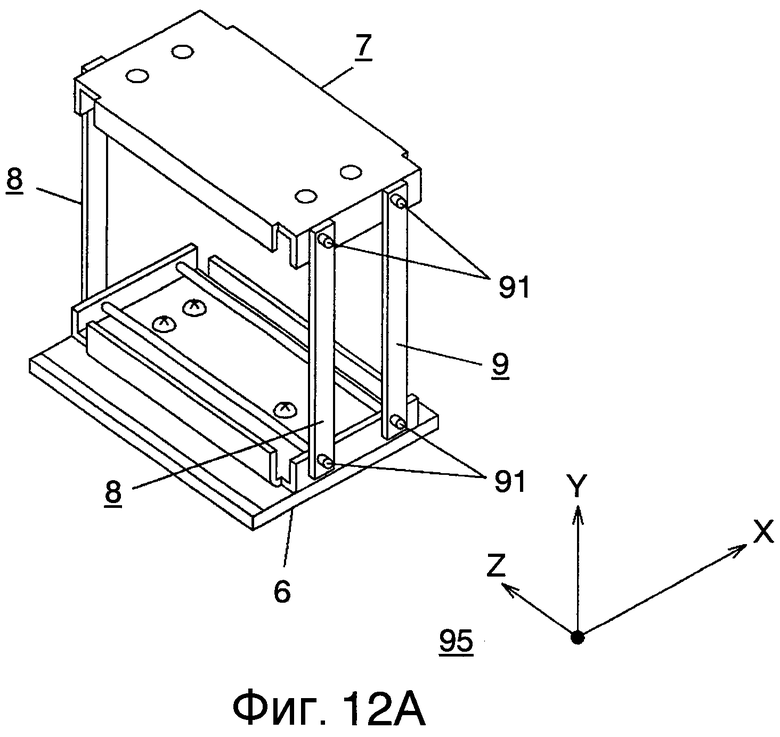
на Фиг.12А показана конфигурация аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения;
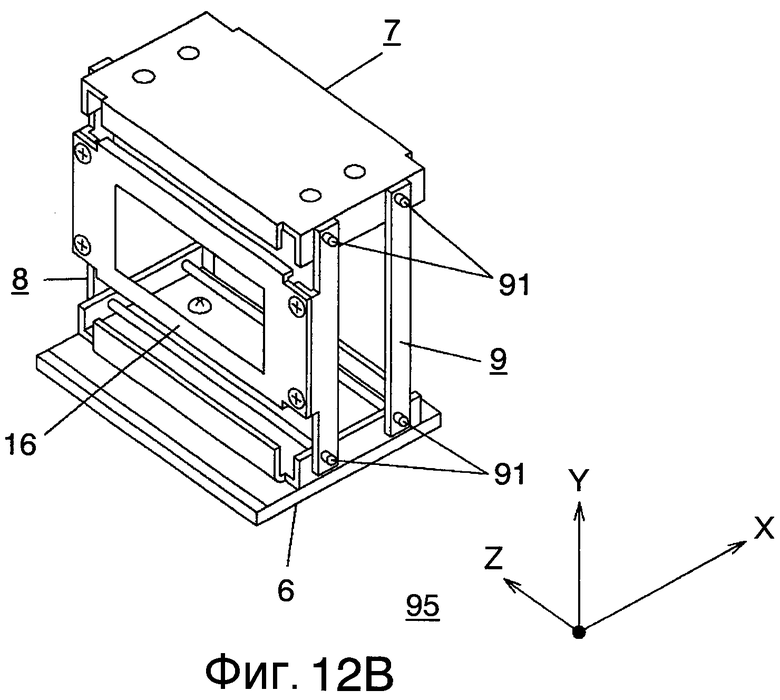
на Фиг.12В показана конфигурация аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения;
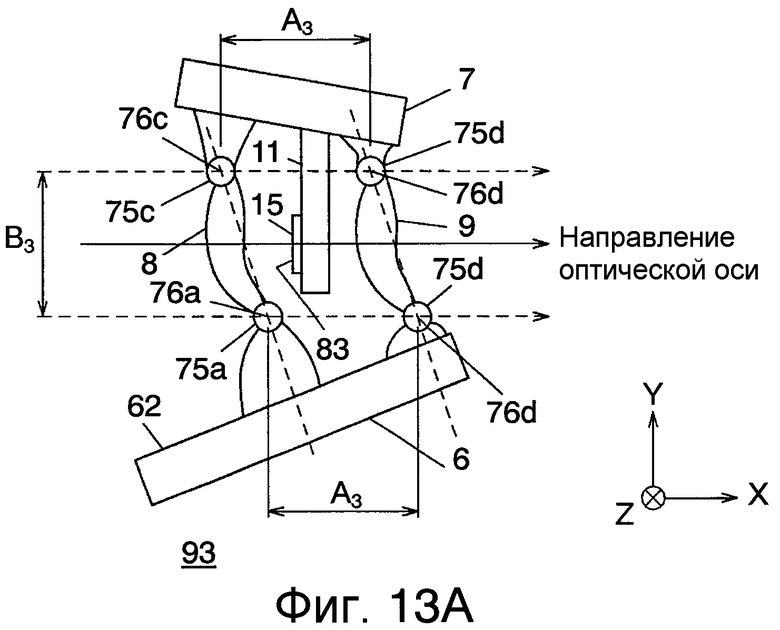
на Фиг.13А показана конфигурация аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения;
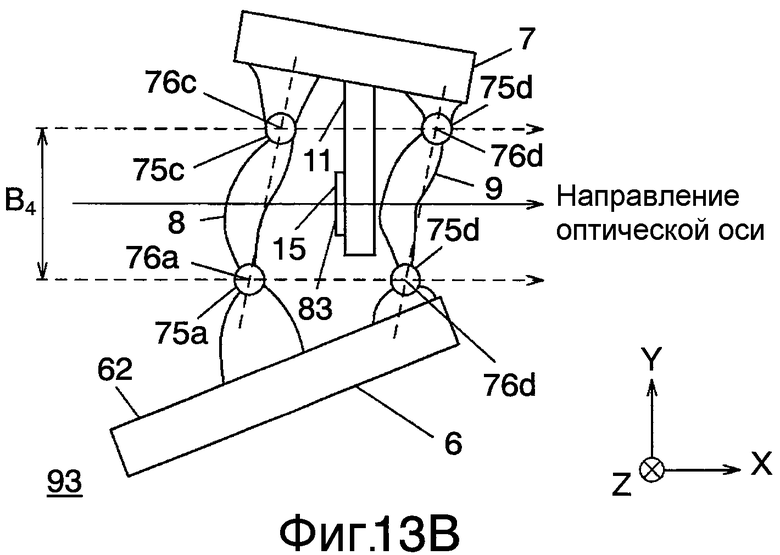
на Фиг.13В показана конфигурация аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения.
Описание обозначений на чертежах
1: фотографирующий аппарат
2: монтажная часть объектива
3: крепежная часть основания
4: часть электродвигателя постоянного тока
5: часть светофильтра
6: основание
7: подвижная часть
8, 108: первая опорная часть
9: вторая опорная часть
10: пластинчатая пружина
11: часть, поддерживающая устройство для съема сигнала
12: схемная часть устройства для съема сигнала
13: изолирующий лист
14: теплоотвод
15: устройство для съема сигнала
16: первая усиливающая накладка
17: вторая усиливающая накладка
18: несущая часть
19: пластинчатая пружина
20: линейный исполнительный механизм
21: цилиндрическая пружина
22: часть, изменяющая направление привода
23: схемная часть
24, 25, 26, 28, 71, 72, 99: винт
27: усиливающая накладка
29: штифт
30: часть, крепящая пружину
41, 75а: первая поворотная часть
42, 75b: вторая поворотная часть
43, 75с: третья поворотная часть
44, 75d: четвертая поворотная часть
51: светофильтр с ограниченной частотой пропускания в области инфракрасного света
52: приводная ось светофильтра
61: часть, обнаруживающая положение
62: поверхность основания
70, 90, 93, 95, 170, 270, 370, 470: аппарат привода устройства для съема сигнала
74, 75, 76, 120, 130: изогнутая часть
76а: первая центральная ось поворота
76b: вторая центральная ось поворота
76c: третья центральная ось поворота
76d: четвертая центральная ось поворота
80: U-образный элемент
81: часть, поддерживающая линейный исполнительный механизм
82, 85: крепежная поверхность
83: поверхность съема сигнала
91: шарнирная часть
96: упругая часть
98: ось
100: приводная часть
101: часть объектива
111: первая точка ответвления
112: вторая точка ответвления
Предпочтительный вариант осуществления изобретения
Далее будет приведено подробное описание вариантов осуществления настоящего изобретения со ссылками на прилагаемые чертежи.
(Вариант осуществления)
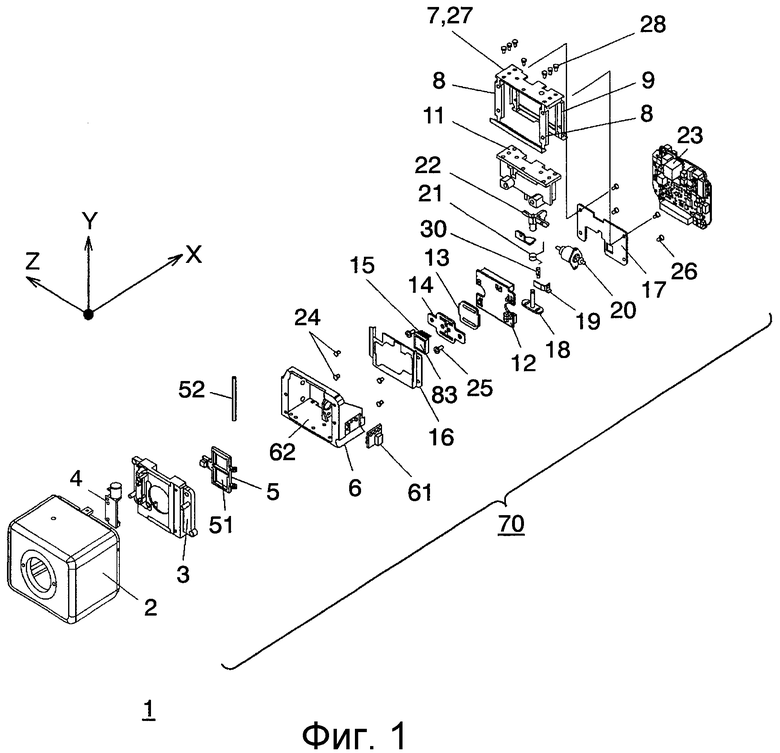
Сначала будет описана конфигурация фотографирующего аппарата 1, соответствующего варианту осуществления настоящего изобретения. На Фиг.1 показана конфигурация фотографирующего аппарата 1, соответствующего варианту осуществления настоящего изобретения. На Фиг. 2 представлено перспективное изображение с пространственным разделением деталей, иллюстрирующее конфигурацию аппарата 70 привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения. Для упрощения описания на чертежах показаны направление оси Х, направление оси Y и направление оси Z, перпендикулярные друг другу. Направление оси Х является направлением оптической оси части объектива, а ось Y и ось Z перпендикулярны направлению оптической оси.
Как показано на Фиг. 1 и 2, фотографирующий аппарат 1, соответствующий варианту осуществления настоящего изобретения, включает в себя монтажную часть 2 объектива, скрепленную с частью 101 объектива (не показанной на Фиг. 1 и 2), крепежную часть 3 основания, предназначенную для соединения основания 6, описываемого ниже, с монтажной частью 2 объектива, часть 4 электродвигателя постоянного тока, который расположен на крепежной части 3 основания и перемещает часть 5 светофильтра, описываемую ниже, в направлении (направлении оси Y), перпендикулярном направлению оптической оси, приводную ось 52 фильтра, которая прикреплена к части 4 электродвигателя постоянного тока и может перемещаться в направлении оси Y за счет приведения в движение части 4 электродвигателя постоянного тока, часть 5 светофильтра, которая прикреплена к приводной оси 52 светофильтра, может перемещаться в направлении оси Y вместе с приводной осью 52 светофильтра и имеет светофильтр 51 с ограниченной частотой пропускания в области инфракрасного света, основание 6, прикрепленное к крепежной части 3 основания и U-образному элементу 80, описываемым ниже, таким образом, что положение основания оказывается фиксированным относительно части 101 объектива, часть 61, обнаруживающую положение, которая прикреплена к основанию 6 и обнаруживает положение части 11, поддерживающей устройство для съема сигнала, подвижную часть 7, которая прикреплена к верхней поверхности основания 6 (именуемой далее поверхностью 62 основания) первой опорной частью 8 и второй опорной частью 9 и обращена к поверхности 62 основания, усиливающую накладку 27 для увеличения прочности подвижной части 7, пластинчатые пружины 10, установленные между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между поверхностью 62 основания и первой опорной частью 8, а также между поверхностью 62 основания и второй опорной частью 9, чтобы обеспечить возможность перемещения подвижной части 7 по поверхности 62 основания в направлении оптической оси (направлении оси Х), первую усиливающую накладку 16, которая прикреплена к первой опорной части 8 винтом 24 и увеличивает механическую прочность первой опорной части 8, вторую усиливающую накладку 17, которая прикреплена ко второй опорной части 9 винтом 26 и увеличивает механическую прочность второй опорной части 9, часть 11, поддерживающую устройство для съема сигнала, которая прикреплена к подвижной части 7 посредством усиливающей накладки 27 винтом 28, теплоотвод 14, прикрепленный с помощью резьбы к части 11, поддерживающей устройство для съема сигнала, посредством изолирующего листа 13 и схемной части 12 устройства для съема сигнала винтом 25, устройство 15 для съема сигнала (известного устройства для съема сигнала, которое является датчиком на основе приборов с зарядовой связью (ПЗС) или на основе комплементарных структур «металл-окисел-полупроводник» (КМОП-структур)), прикрепленного к схемной части 12 устройства для съема сигнала посредством теплоотвода 14 и изолирующего листа 13, линейный исполнительный механизм 20 для приведения в движение части 11, поддерживающей устройство для съема сигнала, в направлении оптической оси (направлении оси Х) вышеописанным способом, несущую часть 18, прикрепленную к поверхности 62 основания, часть 22, изменяющую направление привода, которая испытывает нажатие со стороны линейного привода (линейного исполнительного механизма) 20 и поворачивается на несущей части 18, изменяя направление нажатия линейного исполнительного механизма 20, штифт 29, предусмотренный на поверхности, обращенной к поверхности 62 основания части 11, поддерживающей устройство для съема сигнала, пластинчатую пружину 19, которая прикреплена к части 22, изменяющей направление привода, и поддерживает с возможностью скольжения штифт 29 при вставлении штифта 29 между частью 22, изменяющей направление привода, и пластинчатой пружиной 19, цилиндрическую пружину 21, которая является нажимающей частью для поддержания части 22, изменяющей направление привода, прижатой в некотором направлении, часть 30, крепящую пружину, для крепления цилиндрической пружины 21, и схемную часть 23, включающую в себя часть, обрабатывающую сигнал изображения, для осуществления обработки сигнала изображения на электрическом выходе сигнала из устройства 15 для съема сигнала, управляющую часть для осуществления процесса управления переключением светофильтра 5, и корректирующую часть для осуществления процесса коррекции, описываемого ниже.
Фотографирующий аппарат 1, соответствующий варианту осуществления настоящего наблюдения, является аппаратом, представляющим собой фотокамеру для контроля и наблюдения, проводящим фотографирование, переключая часть 5 светофильтра в соответствии с яркостью окружающей среды днем и ночью. Иными словами, в яркой окружающей среде светофильтр 51 с ограниченной частотой пропускания инфракрасного света располагается на оптической оси, и фотографирование с получением цветных изображений проводится в видимой области спектра, а в темной окружающей среде светофильтр 51 с ограниченной частотой пропускания в области инфракрасного света отводится, и фотографирование с получением монохроматических изображений проводится с помощью светового луча некоторой длины волны, включая световой луч в области инфракрасного света. В фотографирующем аппарате 1 яркость окружающей среды можно обнаруживать путем сравнения интенсивности освещения, обнаруживаемой частью, обнаруживающей изменение интенсивности освещения (не показана), установленной в схемной части 23, с предварительно определенным пороговым значением. Когда интенсивность освещения, обнаруженная упомянутой частью, обнаруживающей изменение интенсивности освещения, превышает упомянутое пороговое значение, определяется, что происходит переход от дневного времени к ночному времени. Таким образом, схемная часть 23 переключает светофильтр 5. Кроме того, переключение светофильтра 5 может проводить часть 4 электродвигателя постоянного тока, прикрепленная к крепежной части 3 основания.
В фотографирующем аппарате 1, соответствующем варианту осуществления настоящего изобретения, переключение части 5 светофильтра осуществляется при изменении интенсивности излучения. В этот момент, поскольку светофильтр 51 с ограниченной частотой пропускания в области инфракрасного света располагают на оптической оси или открепляют (далее будут употребляться слова «прикрепляют» или «открепляют»), длина оптического пути изменяется, и поэтому положение оптимальной фокусировки от части 101 объектива до поверхности (именуемой далее поверхностью 83 съема сигнала), на которой расположен фотоэлектрический преобразующий элемент в устройстве 15 для съема сигнала, изменяется. Чтобы корректировать изменение длины оптического пути, в фотографирующем аппарате 1, соответствующем варианту осуществления настоящего изобретения, аппарат 70 привода устройства для съема сигнала, предназначенный для перемещения устройства 15 для съема сигнала в направлении оптической оси (направлении Х), устанавливается в состоянии, когда поверхность 83 съема сигнала поддерживается в направлении, перпендикулярном направлению оптической оси части 101 объектива (то есть в состоянии, когда устройство 15 для съема сигнала находится в плоскости, параллельной плоскости YZ на Фиг. 1), под управлением управляющей части.
Как описано ниже, в фотографирующем аппарате 1, соответствующем варианту осуществления настоящего изобретения, пластинчатая пружина 10 между основанием 6 и первой опорной частью 8 функционирует как первая несущая часть 41, пластинчатая пружина 10 между основанием 6 и второй опорной частью 9 функционирует как вторая несущая часть 42, пластинчатая пружина 10 между подвижной частью 7 и первой опорной частью 8 функционирует как третья несущая часть 43, пластинчатая пружина 10 между подвижной частью 7 и второй опорной частью 9 функционирует как четвертая несущая часть 44.
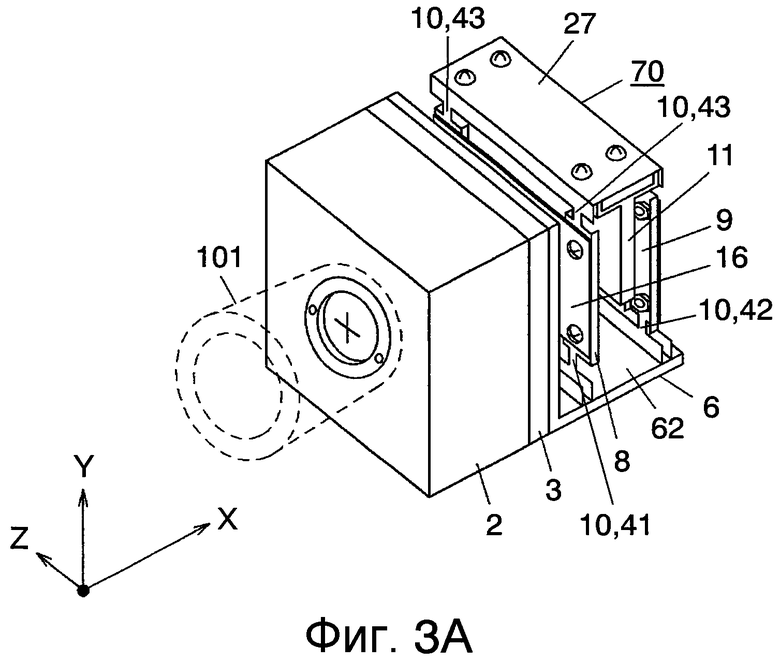
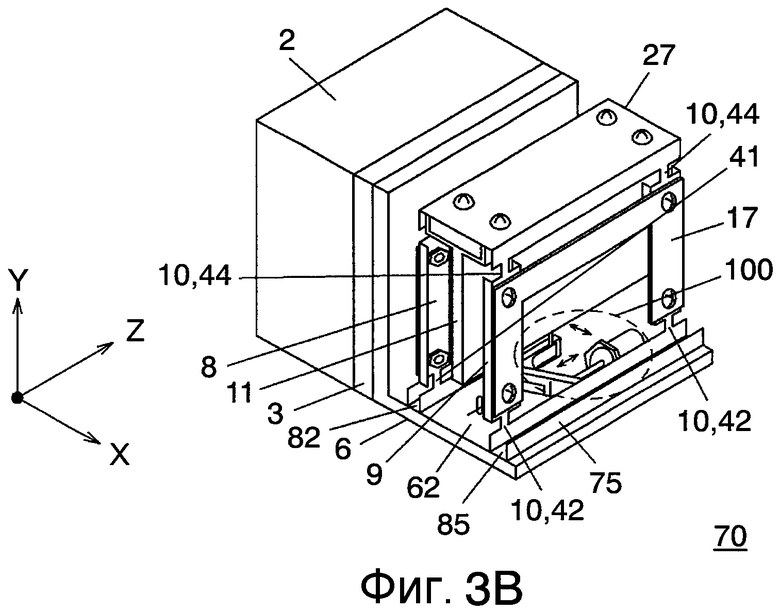
Теперь будет описана конфигурация аппарата 70 привода устройства для съема сигнала, устанавливаемого на фотографирующем аппарате 1 в соответствии с вариантом осуществления настоящего изобретения. На Фиг. 3А-3В представлены виды в перспективе аппарата 70 привода устройства для съема сигнала. На Фиг.3А показан аппарат 70 привода устройства для съема сигнала в случае рассмотрения этого аппарата со стороны части 101 объектива, а на Фиг.3В показан аппарат 70 привода устройства для съема сигнала в случае рассмотрения этого аппарата со стороны линейного исполнительного механизма 20. Для упрощения описания на Фиг. 2, 3А и 3В конструкция упрощена по сравнению с той, которая показана на Фиг.1.
Как показано на Фиг. 2, 3А и 3В, аппарат 70 привода устройства для съема сигнала, соответствующий варианту осуществления настоящего изобретения, включает в себя крепежную часть 3 основания, прикрепленную к монтажной части 2 объектива таким образом, что ее положение оказывается фиксированным относительно части 101 объектива, основание 6, прикрепленное к крепежной части 3 основания винтом 72, первую опорную часть 8 и вторую опорную часть 9, которые установлены на поверхности 62 основания 6 параллельно и имеют одинаковую высоту в направлении Y, прямоугольную подвижную часть 7, которая прикреплена параллельно к поверхности 62 основания в состоянии, в котором первая опорная часть 8 и вторая опорная часть 9 располагаются параллельно друг другу, пластинчатые пружины 10 между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между основанием 6 и первой опорной частью 8, а также между основанием 6 и второй опорной частью 9, усиливающую накладку 27, прикрепленную к верхней поверхности подвижной части 7 винтом 28, первую усиливающую накладку 16, которая прикреплена к первой опорной части 8 винтом 24 и увеличивает механическую жесткость первой опорной части 8, вторую усиливающую накладку 17, которая прикреплена ко второй опорной части 9 винтом 26 и увеличивает механическую жесткость второй опорной части 9, часть 11, поддерживающую устройство для съема сигнала, которая прикреплена к поверхности (задней поверхности), противоположной той поверхности (передней поверхности), на которой усиливающая накладка 27 подвижной части 7 установлена с помощью винта 28 и скреплена винтом 25 со схемной частью 12 устройства для съема сигнала, имеющей устройство 15 для съема сигнала, штифт 29, предусмотренный на нижней поверхности, обращенной к поверхности 62 основания части 11, поддерживающей устройство для съема сигнала, часть 81, поддерживающую исполнительный механизм, установленную на поверхности 62 основания, линейный исполнительный механизм 20, поддерживаемый частью 81, поддерживающей исполнительный механизм, часть 22, изменяющую направление привода, которая поддерживается с возможностью поворота несущей частью 18 (не показана), установленной на поверхности 62 основания с возможностью поворота в направлении оси Y, пластинчатую пружину 19, которая установлена в части 22, изменяющей направление привода, и перемещается с возможностью скольжения при вставлении пальца 29 между частью 22, изменяющей направление привода, и пластинчатой пружиной 19, цилиндрическую пружину 21, которая обеспечивает упругую силу в направлении, противоположном силе нажима, прикладываемой от линейного исполнительного механизма 20 к части 22, изменяющей направление привода, и часть 30, крепящую пружину, для крепления цилиндрической пружины 21.
Как показано на Фиг. 2, 3А или 3В, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, подвижная часть 7, первая опорная часть 8, вторая опорная часть 9 и пластинчатые пружины 10 образованы U-образным интегральным элементом 80, который подвергнут процессу изгиба с приданием U-образной формы. В качестве материала U-образного элемента 80 можно использовать материал, имеющий относительно малую жесткость, такой как материал SUS, имеющий толщину 0,12 мм.
Крепежную часть 3 основания, основание 6 и часть 11, поддерживающую устройство для съема сигнала, можно получить путем литья алюминия под давлением.
В качестве материала усиливающей накладки 27, первой усиливающей накладки 16 и второй усиливающей накладки 17 можно использовать материал, имеющий относительно большую жесткость, такой как материал SUS толщиной 0,5 мм, чтобы увеличить механическую прочность U-образного элемента 80.
В аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, первая опорная часть 8, вторая опорная часть 9, подвижная часть 7 и пластинчатые пружины 10 образованы U-образным интегральным элементом 80. Первая усиливающая накладка 16 и вторая усиливающая накладка 17 прикреплены к частям первой опорной части 8 и второй опорной части 9 соответственно. На сторонах первой опорной части 8 и второй опорной части 9 предусмотрены изогнутые части 74. Таким образом, жесткость первой опорной части 8 и второй опорной части 9 больше, чем жесткость пластинчатых пружин 10.
На участках подвижной части 7 U-образного элемента 80 также предусмотрены изогнутые части 76, а усиливающая накладка 27 прикреплена к подвижной части 7. Таким образом, жесткость подвижной части 7 больше, чем жесткость пластинчатых пружин 10.
На концах крепежных поверхностей 82 и 85 предусмотрены изогнутые части 75, крепящиеся к поверхности 62 основания U-образного элемента 80. Таким образом, жесткость этого участка можно увеличить.
Поскольку участки между подвижной частью 7 U-образного элемента 80 и первой опорной частью 8 и второй опорной частью 9 не подвергаются процессу усиления, такому как процесс изгиба, и имеют значения ширины, меньшие, чем значения ширины других участков, эти участки функционируют как пластинчатые пружины 10.
Точно так же, поскольку участки между крепежными поверхностями 82 и 85 U-образного элемента 80 и первой опорной частью 8 и второй опорной частью 9 не подвергаются процессу усиления, такому как процесс изгиба, и имеют значения ширины, меньшие, чем значения ширины других участков, эти участки тоже функционируют как пластинчатые пружины 10.
В аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, крепежная поверхность 82, на которой первая опорная часть 8 находится в контакте с поверхностью 62 основания, и крепежная поверхность 85, на которой вторая опорная часть 9 находится в контакте с поверхностью 62 основания, прикреплены к поверхности 62 основания винтом 71, располагаясь параллельно направлению оси Z, перпендикулярному направлению оптической оси (направлению оси Х).
Теперь будет подробно описана конфигурация приводной части 100 аппарата 70 привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения.
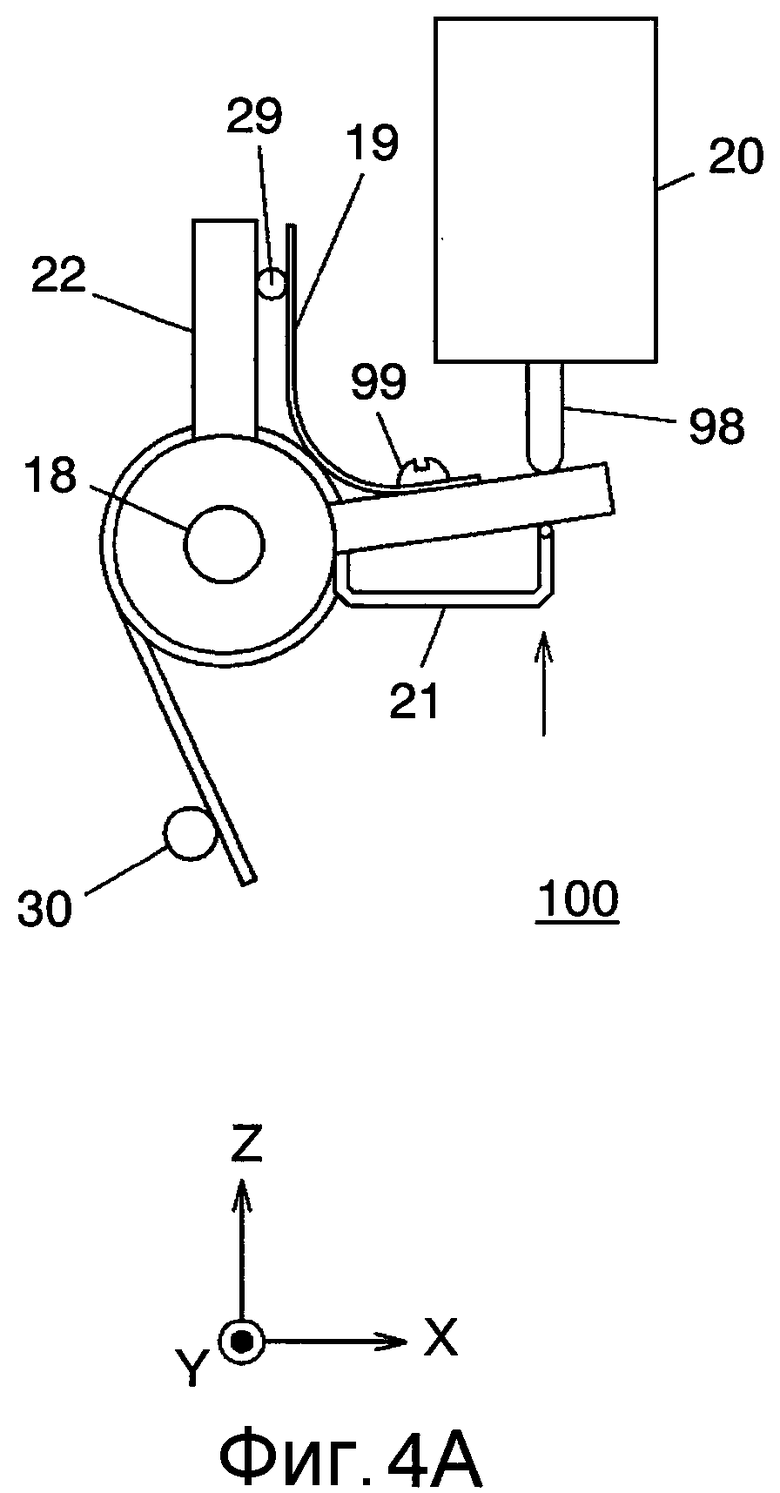
На Фиг. 4А-4В представлены виды в плане, иллюстрирующие конфигурацию приводной части 100 аппарата 70 привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения. На Фиг. 4А представлен вид в плане, иллюстрирующий конфигурацию приводной части 100 аппарата 70 привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения.
Как показано на Фиг.4А, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, линейный привод (линейный исполнительный механизм) 20 оказывает нажим на часть 22, изменяющую направление привода, в вертикальном направлении (направлении оси Z) чертежа посредством оси 98, которая может перемещаться в вертикальном направлении (направлении оси Z) чертежа. На части 22, изменяющей направление привода, установлена цилиндрическая пружина 21 для приложения упругой силы нажатия в направлении, противоположном силе нажатия линейного исполнительного механизма 20. Один конец цилиндрической пружины 21 закреплен частью 30, крепящей пружину. В состоянии, показанном на Фиг.4А, сила нажатия линейного исполнительного механизма 20 и сила нажатия цилиндрической пружины 21 уравновешивают друг друга, вследствие чего часть 22, изменяющая направление привода, находится в остановленном состоянии. Кроме того, пластинчатая пружина 19 прикреплена к части 22, изменяющей направление привода, посредством винта 99 таким образом, что штифт 29 части 11, поддерживающей устройство для съема сигнала, оказывается вставленным между частью 22, изменяющей направление привода, и пластинчатой пружиной 19. Штифт 29 приводится в движение между частью 22, изменяющей направление привода, и пластинчатой пружиной 19 путем изменения силы нажатия линейного исполнительного механизма 20.
На Фиг.4В показано состояние приводной части 100, когда в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, увеличивается сила нажатия линейного исполнительного механизма 20.
Как показано на Фиг. 4В, когда сила нажатия линейного исполнительного механизма 20 увеличивается в состоянии, показанном на Фиг. 4А, т.е. когда ось 98 проходит в направлении вниз (направлении оси Z) чертежа, эта ось 98 оказывает нажатие на часть 22, изменяющую направление привода, а часть 22, изменяющая направление привода, поворачивается на несущей части 18 в направлении по часовой стрелке. Таким образом, штифт 29 движется в направлении вправо (направлении оси Х) на чертеже.
Соответственно, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, поскольку часть 22, изменяющая направление привода, предназначенная для изменения направления выходного сигнала линейного исполнительного механизма 20, включена в состав приводной части 100, линейный исполнительный механизм 20 не должен быть расположен в направлении оптической оси (направлении оси Х). Соответственно, линейный исполнительный механизм 20 может быть расположен в направлении (направлении оси Z), перпендикулярном направлению оптической оси, и поэтому можно реализовать миниатюризацию аппарата. Когда миниатюризация не требуется, линейный исполнительный механизм 20 может осуществлять непосредственное нажатие на штифт 29 и его перемещение без использования части 22, изменяющей направление привода.
Теперь, со ссылками на Фиг. 5А и 5В, будет подробно описан аппарат 70 привода устройства для съема сигнала, соответствующий варианту осуществления настоящего изобретения.
На Фиг.5А представлен вид сбоку, иллюстрирующий пример работы аппарата 70 привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения, а на Фиг.5В представлен вид сбоку, иллюстрирующий пример состояния, когда изменяется положение устройство 15 для съема сигнала.
На Фиг.5А первая опорная часть 8 и вторая опорная часть 9 аппарата 70 привода устройства для съема сигнала перпендикулярны поверхности 62 основания. Расстояние А1 между первой опорной частью 8 и второй опорной частью 9 по поверхности 62 основания равно расстоянию A2 между первой опорной частью 8 и второй опорной частью 9 на соединительном участке, когда подвижная часть 7 проходит в направлении оптической оси (направлении оси Х). Поскольку высота В1 первой опорной части 8 от поверхности 62 основания до подвижной части 7 равна высоте В2 второй опорной части 9 от поверхности 62 основания до подвижной части 7, подвижная часть 7 поддерживается параллельной поверхности 62 основания. Поскольку поверхность 62 основания располагается параллельно направлению оптической оси (направлению оси Х) части 101 объектива, подвижная часть 7 также параллельна направлению оптической оси части 101 объектива.
В аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, часть 11, поддерживающая устройство для съема сигнала, включающая в себя схемную часть 12 устройства для съема сигнала, имеющую устройство 15 для съема сигнала, расположена на нижней поверхности подвижной части 7. При этом за счет крепления поверхности 83 съема сигнала устройства 15 для съема сигнала к части 11, поддерживающей устройство для съема сигнала, поверхность 83 съема сигнала устройства 15 для съема сигнала поддерживается перпендикулярной направлению оптической оси.
В состоянии, показанном на Фиг.5А, сила, с которой ось линейного привода 20 оказывает нажатие на часть 22, изменяющую направление привода, и сила, с которой цилиндрическая пружина 21 оказывает нажатие на часть 22, изменяющую направление привода, в направлении, противоположном направлению нажатия посредством упругой силы, уравновешены, а штифт 29, предусмотренный на части 22, изменяющей направление привода, находится в остановленном состоянии, как описано в связи с Фиг.4А. Из этого состояния линейный привод 20 срабатывает, уменьшая силу нажатия, прикладываемую к части 22, изменяющей направление привода. Тогда сила, с которой цилиндрическая пружина 21 оказывает нажатие на часть 22, изменяющую направление привода, становится больше, чем сила нажатия, с которой линейный привод 20 прикладывает к части 22, изменяющей направление привода, и часть 22, изменяющая направления привода, поворачивается на несущей части 18, а штифт 29, предусмотренный на переднем ее конце, перемещается в левую сторону согласно Фиг.5А. Посредством этого перемещения часть 11, поддерживающая устройство для съема сигнала, перемещается в направлении влево (направлении оси Х) согласно чертежу, как показано на Фиг.5В. Поскольку часть 11, поддерживающая устройство для съема сигнала, перемещается в направлении влево согласно чертежу, пластинчатые пружины 10, предусмотренные между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между поверхностью 62 основания и первой опорной частью 8, а также между поверхностью 62 основания и второй опорной частью 9, упруго деформируются. Соответственно, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, первая опорная часть 8 и вторая опорная часть 9 поворачиваются на пластинчатых пружинах 10, т.е. поворачиваются в направлениях, перпендикулярных направлению оптической оси и параллельных друг другу (направлению оси Z на Фиг.5В). Таким образом, первая опорная часть 8 и вторая опорная часть 9 поворачиваются относительно основания 6 и подвижной части 7.
Иными словами, когда устройство 15 съема сигнала перемещается из состояния, показанного на Фиг.5А, в состояние, показанное на Фиг.5В, поскольку высота В1 первой опорной части 8 и высота В2 второй опорной части 9 равны друг другу, а расстояние А2 между первой опорной частью 8 и второй опорной частью 9 по соединительному участку с подвижной частью 7 и расстояние А1 между первой опорной частью 8 и второй опорной частью 9 по поверхности 62 основания равны друг другу, как описано выше, подвижная часть 7, первая опорная часть 8, вторая опорная часть 9 и поверхность 62 основания деформируются, образуя, по существу, параллелограмм. Соответственно, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, положение устройства 15 для съема сигнала может перемещаться в направлении оптической оси, а подвижная часть 7 при этом поддерживается параллельно поверхности 62 основания. В это время устройство 15 для съема сигнала перемещается в состояние, в котором поверхность 83 съема сигнала устройства 15 для съема сигнала, располагающаяся перпендикулярно подвижной части 7, поддерживается перпендикулярной направлению оптической оси. Иными словами, в состоянии, когда поворот центральных осей первой поворотной части 41, второй поворотной части 42, третьей поворотной части 43 и четвертой поворотной части 44 приводит к образованию вершин, по существу, параллелограмма, подвижная часть 7 поворачивается на основании 6, а устройство 15 для съема сигнала может перемещаться в направлении оптической оси в состоянии, в котором направление плоскости поверхности 83 съема сигнала поддерживается неизменным.
В отличие от вышеизложенного, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, в отличие от вышеуказанного, чтобы переместить устройство 15 для съема сигнала на расстояние от части 101 объектива, за счет увеличения усилия нажатия линейного привода 20 становится больше сила нажима, прикладываемая к части 11, изменяющей направление привода. Тогда, как показано на Фиг.5В, сила нажатия, с которой цилиндрическая пружина 21 оказывает нажатие на часть 22, изменяющую направление привода, становится больше, чем сила нажатия, которую линейный привод 20 прикладывает к части 22, изменяющей направление привода, и эта часть 22, изменяющая направление привода, поворачивается на несущей части 18 в направлении (направлении по часовой стрелке), противоположном вышеуказанному, а штифт 29, предусмотренный на переднем ее конце, перемещается в правую сторону согласно Фиг.5А. Часть 11, поддерживающая устройство для съема сигнала, перемещается в направлении вправо (направлении оси Х) за счет перемещения штифта 29.
В аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, поскольку подвижная часть 7 удерживается посредством первой опорной части 8 и второй опорной части 9, которые имеют одинаковую высоту от поверхности 62 основания, параллельны друг другу и поворачиваются в направлении оптической оси, подвижная часть 7 может перемещаться в направлении оптической оси и при этом всегда поддерживается параллельной поверхности 62 основания. Поскольку часть 11, поддерживающая устройство для съема сигнала, крепится таким образом, что поверхность 83 съема сигнала устройства 15 для съема сигнала располагается в направлении, перпендикулярном подвижной части 7, устройство 15 для съема сигнала может перемещаться в направлении оптической оси, а его поверхность 83 съема сигнала при этом поддерживается перпендикулярной направлению оптической оси, и устройство 15 для съема сигнала может перемещаться с большой точностью.
В вышеописанной конфигурации первая опорная часть 8 и часть 6 основания поддерживаются парой первых поворотных частей 41 (соответствующая точка также называется первой точкой 111 ответвления), а первая опорная часть 8 и подвижная часть 7 поддерживаются парой третьих поворотных частей 43 (соответствующая точка также называется второй точкой 112 ответвления). Иными словами, первая поворотная часть 41 соединяет с возможностью поворота первую опорную часть 8 с основанием 6 в первой точке 111 ответвления, а третья поворотная часть 43 соединяет с возможностью поворота вторую опорную часть 8 с подвижной частью 7 во второй точке 112 ответвления. Первая опорная часть может поддерживать первую точку 111 ответвления и вторую точку 112 ответвления на плоскости при перемещении устройства 15 для съема сигнала. Поэтому в соответствии с аппаратом 70 привода устройства для съема сигнала можно предотвратить создание пространственного искажения, когда положение устройства 15 для съема сигнала изменяется в направлении оптической оси, а также можно предотвратить образование погрешности наклона (то есть плоскостного заедания) поверхности съема сигнала.
В аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, механизмы для перемещения устройства 15 для съема сигнала в направлении оптической оси, т.е. механизмы, включающие в себя крепежную поверхность 82, которая находится в контакте с поверхностью 62 основания, первую опорную часть 8, подвижную часть 7, вторую опорную часть 9, крепежную поверхность 85 и пластинчатые пружины 10 можно получить посредством осуществления процессов, включающих в себя штамповку и формование на материале цельной накладки. Соответственно, трение или перемещение оказывается предельно малым, вследствие чего приведение в действие можно осуществлять с высокой точностью даже тогда, когда осуществляется приведение в действие с незначительным перемещением.
Теперь характеристики линейности при осуществлении приведения в действие с незначительным перемещением будут описаны в сравнении с характеристиками линейности в примере обычной конструкции. В качестве сравнительного примера будет описан аппарат привода устройства для съема сигнала, предназначенный для осуществления приведения в действие устройства 15 для съема сигнала в направлении оптической оси с помощью ходового винта, описанный в известном техническом решении. На Фиг.6 показаны характеристики линейности аппарата 70 привода устройства для съема сигнала, соответствующего варианту осуществления настоящего изобретения, и характеристики линейности согласно сравнительному примеру.
На Фиг.6 по горизонтальной оси отложено количество шагов линейного привода 20, а по вертикальной оси отложено выходное значение, когда положение устройства 15 для съема сигнала измеряется частью 61, обнаруживающей положение. Когда выходное значение, выдаваемое частью 61, обнаруживающей положение, плавно изменяется в зависимости от количества шагов линейного привода 20, можно считать характеристики линейности хорошими. Всякий раз, когда в аппарате 70 привода устройства для съема сигнала, соответствующем настоящему изобретению, линейный привод 20 приводится в движение, совершая один шаг, устройство 15 для съема сигнала перемещается примерно на 5 мм в направлении оптической оси.
В этом состоянии, как показано на Фиг.6, можно заметить, что характеристики линейности аппарата 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, лучше, чем линейные характеристики аппарата привода устройства для съема сигнала согласно сравнительному примеру. Как описано выше, это происходит потому, что количество элементов, вызывающих трение или перемещение, таких как ходовой винт, мало.
На Фиг.6 показан результат построения зависимости между выходным значением части 61, обнаруживающей положение, предусмотренной в аппарате 70 привода устройства для съема сигнала, и количеством этапов линейного привода 20. Соответственно, на Фиг.6 показаны характеристики линейности в окрестности, по существу, центра (исходной точки) диапазона подвижности устройства 15 для съема сигнала в направлении оптической оси (направлении оси Х). Хотя это и не показано, в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, во всем диапазоне подвижности (например, при количестве шагов привода, которое составляет примерно 650, и расстоянии перемещения, которое составляет примерно 3,3 мм) устройства 15 для съема сигнала в направлении оптической оси (направлении оси Х), когда измеряется расстояние перемещения устройства 15 для съема сигнала в направлении оптической оси (направлении оси Х), связанное с количеством шагов линейного привода 20, можно заметить, что характеристики линейности значительно выше, чем характеристики линейности согласно сравнительному примеру.
Хотя в аппарате 70 привода устройства для съема сигнала согласно вышеописанному варианту осуществления настоящего изобретения основание 6 и подвижная часть 7 опираются на пару, состоящую из первой опорной детали 8 и второй опорной детали 9, имеющих форму столбиков, механическая прочность первой опорной детали 8 увеличивается первой усиливающей накладкой 16, а механическая прочность второй опорной части 9 увеличивается второй усиливающей накладкой 17, аппарат 70 привода устройства для съема сигнала, соответствующий настоящему изобретению, не ограничивается этой конфигурацией.
На Фиг.7 представлен вид в перспективе, иллюстрирующий конфигурацию аппарата 170 привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения. Как показано на Фиг.7, в аппарате 170 привода устройства для съема сигнала первая опорная часть 108 является планарным элементом, имеющим отверстие на участке, через который передается луч света, а не в столбиковом элементе. Первая опорная часть 108 имеет узкий участок, который находится в контакте с основанием 6, обеспечивая конфигурацию с первой точкой 111 ответвления (первой поворотной части 41), и узкий участок, который находится в контакте с подвижной частью 7, обеспечивая конфигурацию со второй точкой 112 ответвления (третьей поворотной части 43). Ввиду этой конфигурации не требуется первая усиливающая накладка 16. В первой опорной части 108 сформирована изогнутая часть 120, вследствие чего увеличивается плоскостная прочность первой опорной части. Ввиду этой конфигурации становится возможным подавление возникновения плоскостного заедания при перемещении устройства 15 для снятия сигнала перемещается. Вместо первой планарной опорной части 108 можно использовать вторую планарную опорную часть 9.
При наличии вышеописанной конфигурации, где используется первая планарная опорная часть 108, можно осуществлять различные дополнительные процессы применительно к первой опорной части 108, в дополнение к изогнутой части 120. На Фиг. 8, 9А, 9В, 10А и 10В показаны конфигурации аппаратов 270, 370 и 470 привода устройств для съема сигнала, в которых используются планарные опорные части 108 в соответствии с вариантами осуществления настоящего изобретения.
Прежде всего, отметим применительно к увеличению жесткости первой планарной опорной части 108 в аппарате 270 привода устройства для съема сигнала, показанном на Фиг.8, что эту жесткость первой планарной опорной части 108 можно увеличить путем изгиба периферийных участков отверстия, через которое передается луч света, чтобы обеспечить изогнутые участки 130. Как показано на Фиг.8, эту жесткость можно увеличить за счет изгиба участков 130 либо наружу, либо внутрь аппарата 270 привода устройства для съема сигнала.
Чтобы осуществить увеличение жесткости первой планарной опорной части 108 в аппарате 370 привода устройства для съема сигнала, показанном на Фиг.9А, эту жесткость первой планарной опорной части 108 можно увеличить путем прессования периферийных участков отверстия, через которое передается луч света, чтобы обеспечить прессованную часть 140. На Фиг.9В показана форма поперечного сечения прессованной части 140, изображенной на Фиг.9А. Как показано на Фиг.9В, прессованная часть 140 запрессована таким образом, что ее поперечное сечение имеет, по существу, круглую форму.
Чтобы осуществить увеличение жесткости первой планарной опорной части 108 в аппарате 470 привода устройства для съема сигнала, показанном на Фиг.10А, эту жесткость первой планарной опорной части 108 можно увеличить путем прессования периферийных участков отверстия, через которое передается луч света, чтобы обеспечить прессованную часть 150. На Фиг.10В показана форма поперечного сечения прессованной части 150, изображенной на Фиг. 10А. Как показано на Фиг.10В, прессованная часть 150 запрессована таким образом, что периферийные участки отверстия оказываются выступающими. Эти периферийные участки могут выступать наружу или внутрь аппарата 470 привода устройства для съема сигнала.
В аппаратах 270, 370 и 470 привода устройства для съема сигнала, показанных на Фиг. 8, 9А, 9В, 10А или 10В, можно увеличить плоскостную прочность путем осуществления процесса изгиба и процесса прессования, хотя в качестве материала первой опорной части 108 используется пластинчатая пружина, которая легко гнется.
Хотя в аппарате 70 привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, пластинчатые пружины 10 выполнены между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между поверхностью 62 основания и первой опорной частью 8, а также между поверхностью 62 основания и второй опорной частью 9, аппарат привода устройства для съема сигнала, соответствующий настоящему изобретению, не ограничивается этой конфигурацией.
Теперь будет описан аппарат привода устройства для съема сигнала, соответствующий другому варианту осуществления настоящего изобретения.
На Фиг.11 показана конфигурация аппарата привода устройства для съема сигнала, соответствующего другому варианту осуществления настоящего изобретения, а на Фиг. 12А-12В показан еще один вариант осуществления настоящего изобретения.
Например, в аппарате 90 привода устройства для съема сигнала, показанном на Фиг.11, между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между поверхностью 62 основания и первой опорной частью 8, а также между поверхностью 62 основания и второй опорной частью 9 выполнены шарнирные части 91. За счет этой конфигурации, в дополнение к вышеописанным эффектам, оказывается возможной реализация конфигурации, имеющей повышенное сопротивление удару. Даже в этой конфигурации, как показано на Фиг.11, предпочтительно иметь упругую часть 96, такую как цилиндрическая пружина, для упругого соединения первой опорной части 8 со второй опорной частью 9, чтобы подавить перемещение шарнирных частей 91.
Хотя в этом варианте осуществления шарнирные части 91 выполнены между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между поверхностью 62 основания и первой опорной частью 8, а также между поверхностью 62 основания и второй опорной частью 9, аппарат привода устройства для съема сигнала, соответствующий настоящему изобретению, не ограничивается этой конфигурацией. Например, пластинчатые пружины 10 могут быть выполнены на нескольких участках из участков между подвижной частью 7 и первой опорной частью 8, между подвижной частью 7 и второй опорной частью 9, между поверхностью 62 основания и первой опорной частью 8, а также между поверхностью 62 основания и второй опорной частью 9, а шарнирные части 91 могут быть выполнены на других их участках.
Хотя в вариантах осуществления настоящего изобретения аппараты 70 и 90 привода устройств для съема сигнала включают в себя пару первых опорных частей 8 и пару вторых опорных частей 9, аппарат привода устройства для съема сигнала, соответствующий настоящему изобретению, не ограничивается этой конфигурацией. Например, подобно аппарату 95 привода устройства для съема сигнала, показанному на Фиг. 12А или 12В, в состав аппарата могут входить пара первых опорных частей 8 и одна вторая опорная часть 9 или могут входить пара вторых опорных частей 9 и одна первая опорная часть 8. Даже в этой конфигурации, поскольку в состав входит пара первых опорных частей 8 или пара вторых опорных частей 9, можно увеличить жесткость в направлении, перпендикулярном направлению оптической оси.
Хотя в аппарате привода устройства для съема сигнала, соответствующем варианту осуществления настоящего изобретения, поверхность 62 основания и подвижная часть 7 параллельны направлению оптической оси, а первая опорная часть 8 и вторая опорная часть 9 имеют одинаковую высоту и параллельны друг другу, как показано на Фиг. 5А и 5В, аппарат привода устройства для съема сигнала, соответствующий настоящему изобретению, не ограничивается этой конфигурацией.
На Фиг. 13А и 13В показаны виды сбоку аппарата привода устройства для съема сигнала, соответствующего еще одному варианту осуществления настоящего изобретения.
Аппарат 93 привода устройства для съема сигнала, показанный на Фиг. 13А-13В, включает в себя основание 6, положение которого фиксировано относительно части объектива, подвижную часть 7, предусмотренную в некотором положении таким образом, что она обращена к основанию 6, первую опорную часть 8 и вторую опорную часть 9, которые предусмотрены на поверхности 62 основания, принадлежащей основанию 6, и служат опорами подвижной части 7, и часть 11, поддерживающую устройство для съема сигнала, имеющую первую поворотную часть 75а, предусмотренную между основанием 6 и первой опорной частью 8, вторую поворотную часть 75b, предусмотренную между основанием 6 и второй опорной частью 9, третью поворотную часть 75с, предусмотренную между первой опорной частью 8 и подвижной частью 7, четвертую поворотную часть 75d, предусмотренную между второй опорной частью 9 и подвижной частью 7, и устройство 15 для съема сигнала, предусмотренное на подвижной части 7.
Первая поворотная часть 75а, вторая поворотная часть 75b, третья поворотная часть 75с и четвертая поворотная часть 75d имеют такую же функцию шарнира, как вышеописанные шарнирные части 91.
В аппарате 93 привода устройства для съема сигнала, показанном на Фиг. 13А и 13В, подвижная часть 7 и основание 6 не параллельны направлению оптической оси части объектива, а первая опорная часть 8 и вторая опорная часть 9 не линейны, в отличие от аппарата 70 привода устройства для съема сигнала, показанного на Фиг. 5А и 5В.
Вместе с тем, в аппарате 93 привода устройства для съема сигнала центральная ось 76а поворота (именуемая далее первой центральной осью поворота) первой поворотной части 75а, центральная ось 76b поворота (именуемая далее второй центральной осью поворота) второй поворотной части 75b, центральная ось 76c поворота (именуемая далее третьей центральной осью поворота) третьей поворотной части 75с и центральная ось 76d поворота (именуемая далее четвертой центральной осью поворота) четвертой поворотной части 75d параллельны друг другу и перпендикулярны направлению оптической оси.
В аппарате 93 привода устройства для съема сигнала, показанном на Фиг.13А, первая центральная ось 76а поворота и вторая центральная ось 76b поворота расположены параллельно направлению оптической оси. Точно так же, третья центральная ось 76с поворота и четвертая центральная ось 76d поворота расположены параллельно направлению оптической оси и отстоят друг от друга на такое же расстояние А3, как то, которое имеется между первой центральной осью 76а поворота и второй центральной осью 76b поворота.
Иными словами, первая центральная ось 76а поворота, вторая центральная ось 76b поворота, третья центральная ось 76с поворота и четвертая центральная ось 76d поворота находятся соответственно в вершинах параллелограмма.
Например, в состоянии, показанном на Фиг.13А, первая центральная ось 76а поворота, вторая центральная ось 76b поворота, третья центральная ось 76с поворота и четвертая центральная ось 76d поворота образуют вершины параллелограмма, имеющего длину А3 стороны и высоту В3.
На Фиг.13 показан случай, когда подвижная часть 7 или часть 11, поддерживающая устройство для съема сигнала, перемещается в направлении, в котором устройство 15 для съема сигнала отдаляется от части объектива (т.е. в направлении оси Х) за счет приведения в движение приводной части (не показана). Как показано на Фиг.13В, высота изменяется от высоты В3 до высоты В4, а устройство 15 для съема сигнала переходит в состояние, в котором первая центральная ось 76а поворота, вторая центральная ось 76b поворота, третья центральная ось 76с поворота и четвертая центральная ось 76d поворота оказываются в вершинах параллелограмма (в состоянии, в котором направление соединения первой центральной оси 76а поворота со второй центральной осью 76b поворота параллельно направлению соединения третьей центральной оси 76с поворота с четвертой центральной осью 76d поворота).
Подвижная часть 7 перемещается в направлении оптической оси, при этом угол направления оптической оси сохраняется, и поэтому устройство 15 для съема сигнала может перемещаться в направлении оптической оси (направлении оси Х) в состоянии, в котором направление поверхности 83 съема сигнала сохраняется.
Центральное положение поверхности 83 съема сигнала устройства 15 для съема сигнала изменяется в зависимости от перемещения устройства 15 для съема сигнала в направлении оптической оси (направлении оси Х). Вместе с тем, за счет установки части, вычисляющей величину смещения, предназначенной для вычисления величины смещения в направлении (направлении оси Y), перпендикулярном направлению оптической оси устройства 15 для съема сигнала, из положения устройства 15 для съема сигнала в направлении оптической оси (направлении оси Х), обнаруживаемого частью 61, обнаруживающей положение, и корректирующей частью для сдвига области считывания сигнала на величину смещения с целью коррекции величины смещения в схемной части 23 (не показана), создается возможность действительного устранения влияния, обуславливаемого смещением устройства 15 для съема сигнала в направлении, перпендикулярном направлению оптической оси. Когда величина перемещения устройства 15 для съема сигнала в направлении оптической оси (направлении оси Х) мала, вышеописанный процесс коррекции фактически можно не проводить.
Хотя в варианте осуществления настоящего изобретения часть 11, поддерживающая устройство для съема сигнала, предназначенная для поддержания устройства 15 для съема сигнала, предусмотрена на поверхности подвижной части 7, обращенной к основанию 6, настоящее изобретение не ограничивается этой конфигурацией. Например, даже когда часть 11, поддерживающая устройство для съема сигнала, предусмотрена на поверхности, противоположной той поверхности, которая обращена к основанию 6 подвижной части 7 (например, верхней поверхности подвижной части 7, как показано на Фиг.5А), устройство 15 для съема сигнала может перемещаться в направлении оптической оси в состоянии, когда поверхность 83 съема сигнала устройства 15 для съема сигнала поддерживается перпендикулярной направлению оптической оси.
Хотя описаны примеры установки аппарата привода устройства для съема сигнала в соответствии с вариантами осуществления настоящего изобретения на аппарате, представляющем собой фотокамеру для контроля и наблюдения, использование фотографирующего прибора, соответствующего настоящему изобретению, не ограничивается аппаратом, представляющим собой фотокамеру для контроля и наблюдения. Например, настоящее изобретение можно устанавливать на любой известной камере, такой как видеокамера или цифровая камера.
Промышленная применимость
Как описано выше, в соответствии с настоящим изобретением устройство для съема сигнала может перемещаться в направлении оптической оси части объектива в состоянии, когда поверхность съема сигнала поддерживается перпендикулярной направлению оптической оси части объектива за счет простой конфигурации, при наличии которой устройство для съема сигнала крепится к подвижной части, которую можно перемещать по поверхности основания в направлении оптической оси части объектива. Соответственно, можно подавить возникновение механического перемещения, обуславливаемого использованием ходового винта и гайки. Кроме того, даже при небольшом перемещении оказывается возможной реализация фотографирующего аппарата, который может с большой точностью осуществлять привод устройства для съема сигнала. Таким образом, настоящее изобретение применимо к такому фотографирующему аппарату, как аппарат, представляющий собой фотокамеру для контроля и наблюдения, или аппарат, представляющий собой видеокамеру, а более конкретно к аппарату приведения в действие устройства для съема сигнала, предназначенному для перемещения устройства для съема сигнала в направлении оптической оси части объектива, и к фотографирующему аппарату, в котором используется такой аппарат привода.
Изобретение относится к средствам контроля и наблюдения, а более конкретно к средствам контроля и наблюдения с приводом устройства для съема сигнала, предназначенного для перемещения устройства для съема сигнала в направлении оптической оси. Техническим результатом является создание устройства для съема сигнала, запуск которого осуществляется с высокой точностью даже при небольшом перемещении. Результат достигается тем, что аппарат привода устройства для съема сигнала включает в себя основание, положение которого фиксировано относительно части объектива, подвижную часть, устройство для съема сигнала, которое прикреплено к подвижной части в состоянии, в котором поверхность съема сигнала перпендикулярна направлению оптической оси, первую опорную часть и вторую опорную часть, которые предусмотрены между основанием и подвижной частью и служат подвижной части опорой, первую поворотную часть, вторую поворотную часть, третью поворотную часть, четвертую поворотную часть и приводную часть, которая изменяет положение устройства для съема сигнала относительно части объектива в состоянии, в котором центральные оси поворота образуют вершины параллелограмма. 3 н. и 9 з.п. ф-лы, 20 ил.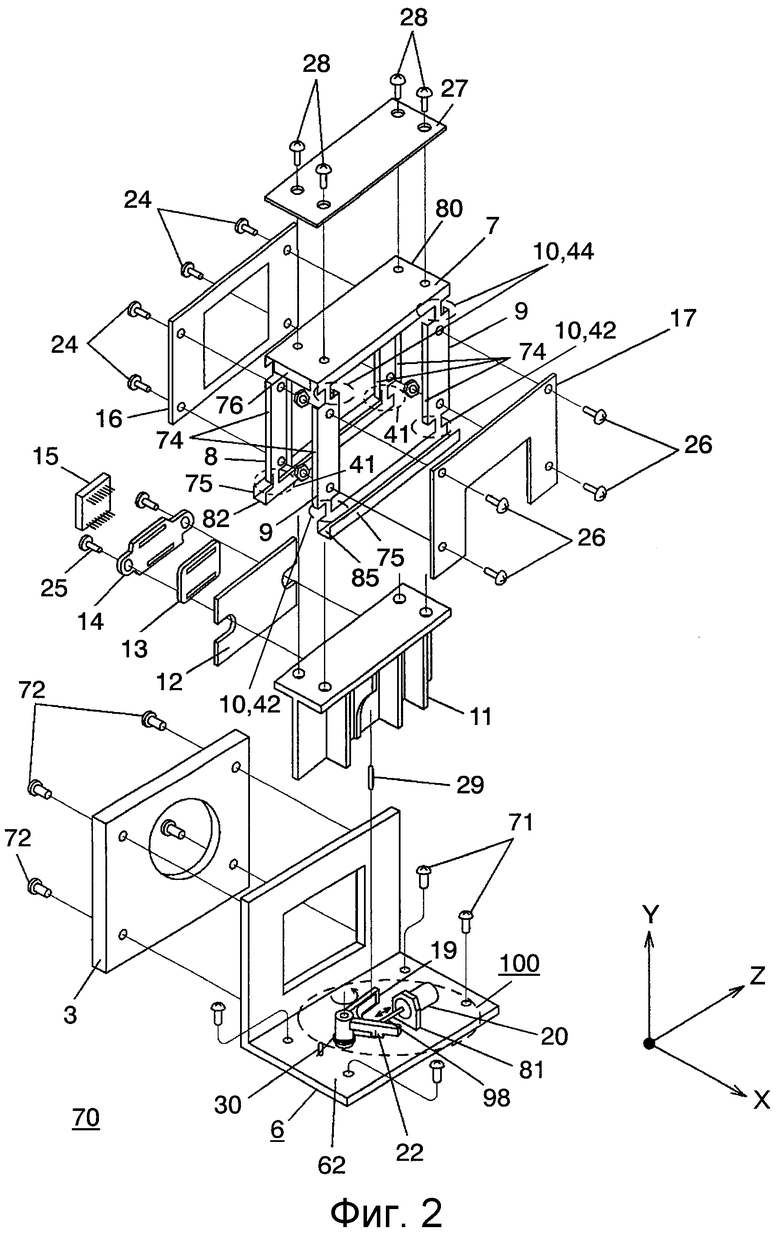
1. Аппарат привода устройства для съема сигнала, содержащий основание, положение которого фиксировано относительно части объектива,
подвижную часть, которая предусмотрена обращенной к основанию,
устройство для съема сигнала, которое прикреплено к подвижной части в состоянии, в котором поверхность съема сигнала перпендикулярна направлению оптической оси,
первую опорную часть и вторую опорную часть, которые предусмотрены между основанием и подвижной частью и поддерживают подвижную часть,
первую поворотную часть, которая предусмотрена между основанием и первой опорной частью,
вторую поворотную часть, которая предусмотрена между основанием и второй опорной частью в положении, в котором она параллельно
перемещается от первой поворотной части в направлении оптической оси,
третью поворотную часть, которая предусмотрена между подвижной частью и первой опорной частью,
четвертую поворотную часть, которая предусмотрена между подвижной частью и второй опорной частью в положении, в котором она образует вершину параллелограмма относительно первой поворотной части, второй поворотной части и третьей поворотной части, и
приводную часть, которая изменяет положение устройства для съема сигнала относительно части объектива,
причем центральные оси поворота первой поворотной части, второй поворотной части, третьей поворотной части и четвертой поворотной части перпендикулярны направлению оптической оси и параллельны друг другу, и
при этом положение устройства для съема сигнала изменяется относительно части объектива в состоянии, в котором первая поворотная часть, вторая поворотная часть, третья поворотная часть и четвертая поворотная часть образуют вершины параллелограмма.
2. Аппарат привода устройства для съема сигнала по п.1, в котором первая опорная часть соединена с возможностью поворота с основанием посредством первой точки ответвления и соединена с возможностью поворота с подвижной частью посредством второй точки ответвления, а первая точка ответвления и вторая точка ответвления образуют плоскость, причем вторая опорная часть соединена с возможностью поворота с подвижной частью и основанием, причем первая поворотная часть соединяет основание с первой опорной частью в первой точке ответвления, и при этом третья поворотная часть соединяет подвижную часть с первой опорной частью во второй точке ответвления.
3. Аппарат привода устройства для съема сигнала по п.2, в котором, по меньшей мере, одна из первой поворотной части, второй поворотной части, третьей поворотной части и четвертой поворотной части является пластинчатой пружиной.
4. Аппарат привода устройства для съема сигнала по п.2, в котором первая поворотная часть, вторая поворотная часть, третья поворотная часть и четвертая поворотная часть являются пластинчатыми пружинами.
5. Аппарат привода устройства для съема сигнала по п.3, в котором подвижная часть, первая опорная часть, вторая опорная часть и пластинчатая пружина выполнены как единое целое, а, по меньшей мере, одна из подвижной части, первой опорной части и второй опорной части имеет усиливающую накладку для увеличения жесткости.
6. Аппарат привода устройства для съема сигнала по п.2, в котором, по меньшей мере, одна из первой поворотной части, второй поворотной части, третьей поворотной части и четвертой поворотной части является шарнирной частью.
7. Аппарат привода устройства для съема сигнала по п.2, в котором первая поворотная часть, вторая поворотная часть, третья поворотная часть и четвертая поворотная часть являются шарнирными частями.
8. Аппарат привода устройства для съема сигнала по п.2, в котором между первой опорной частью и второй опорной частью предусмотрена упругая часть.
9. Аппарат привода устройства для съема сигнала по п.2, дополнительно содержащий нажимающую часть для нажатия на подвижную часть в предварительно определенном направлении, причем приводная часть уменьшает силу нажатия, прикладываемую к подвижной части нажимающей частью, для приведения в действие подвижной части.
10. Фотографирующий аппарат, содержащий
часть объектива,
аппарат привода устройства для съема сигнала по п.1, и
часть, обрабатывающую сигнал изображения, которая осуществляет обработку сигнала изображения, делая это с сигналом, выдаваемым из устройства для съема сигнала, которое имеется в аппарате привода устройства для съема сигнала.
11. Фотографирующий аппарат по п.10, дополнительно содержащий часть, вычисляющую величину смещения, которая вычисляет величину смещения устройства для съема сигнала в направлении, перпендикулярном направлению оптической оси, и корректирующую часть, которая корректирует сигнал изображения, обработанный частью, обрабатывающей сигнал изображения, на основании величины смещения устройства для съема сигнала изображения, вычисленной частью, вычисляющей величину смещения, в направлении, перпендикулярном направлению оптической оси.
12. Аппарат фотокамеры для контроля и наблюдения, содержащий
часть объектива,
аппарат привода устройства для съема сигнала по п.1,
часть, обнаруживающую изменение интенсивности освещения, которая обнаруживает изменение интенсивности освещения,
часть светофильтра, которая обеспечивает прикрепление и открепление светофильтра с ограниченной частотой пропускания в области инфракрасного света на оптической оси части объектива в зависимости от изменения интенсивности освещения, обнаруживаемого частью, обнаруживающей изменение интенсивности освещения, и
управляющую часть, которая обеспечивает приведение в движение приводной части устройства для съема сигнала, которое имеется в аппарате привода устройства для съема сигнала, когда прикрепляют и открепляют светофильтр с ограниченной частотой пропускания в области инфракрасного света, имеющийся в части светофильтра.
| JP 2004226775, 12.08.2004 | |||
| Штатив спектральной установки | 1989 |
|
SU1703993A1 |
| JP 2002099019 A, 05.04.2002 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| ИЗДЕЛИЕ ДЛЯ ГЕНЕРИРОВАНИЯ ВДЫХАЕМОЙ СРЕДЫ И СПОСОБ НАГРЕВАНИЯ КУРИТЕЛЬНОГО МАТЕРИАЛА | 2017 |
|
RU2720955C2 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| ШТАТИВ И ЕГО ПРИМЕНЕНИЕ | 1998 |
|
RU2194633C2 |

