Изобретение относится к инвалидным коляскам, роботам и др. транспортным средствам, приспособленным для перемещения по лестницам и иной поверхности с ярко выраженными макронеровностями, конкретно - к их тормозам (стопорам колес), автоматически приводимым в действие при потере контакта с опорной поверхностью.
Наиболее существенной, актуальной проблемой на пути создания мобильных технических средств реабилитации (TCP) является проблема передвижения лиц с ограниченными физическими возможностями, роботов и грузовых тележек по лестницам и преодоления др. профильных препятствий со ступенчатым рельефом. По-прежнему злободневны и вопросы безопасности движения относительно тихоходных малоразмерных транспортных средств (в том числе TCP) по горизонтальной поверхности с возможными резкими перепадами уровней (провалы, выбоины, открытые люки и т.д.).
В настоящее время задача преодоления лестниц (лестничных маршей) решается применением движителей высокой проходимости как дополнительных устройств временного повышения проходимости колесного транспортного средства. Это, как правило, либо навесные гусеничные тележки, либо крестообразные или рычажные шагающие механизмы [SU 1607806 А1, A61G 5/06, 23.11.1990; RU 86928, B62B 9/06, 09.07.2009; RU 2304952 C1, A61G 5/06, B62B 11/00, 27.08.2007; RU 2312788, B62D 57/028, A61G 5/06, 02.12.2005; US 6224068, B60B 33/02, B62B 3/00, 01.05.2001].
Известен автоматический тормоз транспортного средства, преимущественно для перемещения человека по лестницам, включающий рычаги с опорными роликами на своих свободных концах, шарнирно установленные на раме транспортного средства сбоку-спереди колес транспортного средства с возможностью принудительного перевода из нерабочего, вне лестничных маршей, верхнего положения в рабочее, на лестничных маршах, нижнее положение с качением роликов по ступени рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью. Рычаги подпружинены с возможностью фиксации рычагов в нерабочем верхнем их положении силами упругости пружин. Рычаги снабжены опорными костылями с фрикционными опорными плоскостями, расположенными между шарнирно закрепленным основанием рычага и его опорным роликом с возможностью контакта фрикционной поверхности костыля с текущей ступенью при вывешивании опорного ролика над последующей ступенью [RU 2368366 С1, A61G 5/06, 19.02.2008, с.8].
Известный тормоз хорош своей компактностью, однако, как показала практика эксплуатации и испытания ходовых макетов лестничных подъемников с вариантами «костыльных» тормозов, он ненадежен, особенно в российских условиях эксплуатации: на скользких (обледенение, маслянистое загрязнение и т.п.), а также изношенных и выщербленных ступенях тормоза не срабатывают по причине проскальзывания их опорных пят.
Наиболее близким к заявленному изобретению по назначению и совокупности конструктивных признаков аналогом (прототипом) является автоматический тормоз транспортного средства, преимущественно для перемещения человека по лестницам, включающий рычаги с опорными роликами на своих свободных концах, шарнирно установленные на раме транспортного средства сбоку-спереди колес транспортного средства с возможностью принудительного перевода из нерабочего, вне лестничных маршей, верхнего положения в рабочее, на лестничных маршах, нижнее положение с качением роликов по ступени рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью. Рычаги подпружинены с возможностью фиксации рычагов в нерабочем верхнем их положении силами упругости пружин. Тормоз снабжен ленточным устройством автоматического торможения колес на расстоянии от кромки ступени, достаточном для начала перемещения по ступеням лестницы в режиме спуска по лестнице. При этом тормозные ленты своими концами закреплены, соответственно, на ступицах колес или иных элементах, неподвижных относительно рамы, и на рычагах с возможностью частичного охвата, с трением, вращающихся частей колес, преимущественно тормозных барабанов колес, предусмотренных с этой целью [RU 2368366 С1, A61G 5/06, 19.02.2008, с.1, 2, 5, 7, 8, 11, фиг.2, 3, 4].
Устройство, иначе говоря, содержит пары пассивных и активных элементов (например, тормозные барабаны и тормозные ленты соответственно), последние из которых связаны с упомянутыми рычагами, с возможностью взаимодействия друг с другом (трения) и препятствия вращению колес (в данном случае фрикционным торможением) во включенном состоянии тормоза, при их взаимосвязи.
Однако, как показали длительные ходовые испытания опытных образцов, такой тормоз недостаточно надежен по следующим причинам.
Во-первых, силы упругости пружины и веса рычага с роликом в совокупности плюс рабочей площади ленты недостаточно для создания необходимого тормозного момента на колесе в широком спектре условий эксплуатации.
Во-вторых, устройство требует тщательной изоляции от «антифрикционных» воздействий на фрикционную пару (предотвращение попадания смазочного масла, жидкостей при чистке, жидкостей и твердых включений со стороны окружающей среды).
В-третьих (вытекает из предыдущего недостатка), высока вероятность неодинаковых тормозных моментов по правому и левому бортам транспортного средства, приводящая к рысканию транспортного средства и, соответственно, ухудшению условий работы шагающего движителя, частым аварийным ситуациям.
В-четвертых, срабатывание (автоматические включение и выключение) тормоза зависит от угла продольного наклона рамы: с увеличением наклона рамы вперед тормоз, естественно, включается при большем перепаде высот опорных поверхностей (т.е. позднее или может вообще не включиться).
Все это обусловливает недостаточную надежность тормоза-прототипа в широком спектре условий эксплуатации.
Задачей, на решение которой направлено заявленное изобретение, является создание автоматического тормоза транспортного средства, преимущественно для перемещения человека по лестницам с более высокой надежностью в широком спектре условий эксплуатации, путем обеспечения автоматического стопорения колеса, меньшей зависимости от внешних условий, одинакового стопорного эффекта по бортам транспортного средства и независимости от угла продольного наклона рамы транспортного средства.
Решение поставленной задачи достигается тем, что в автоматическом тормозе транспортного средства, преимущественно для перемещения человека по лестницам, содержащем рычаги с опорными роликами на своих свободных концах, шарнирно установленные на раме транспортного средства сбоку-спереди колес транспортного средства с возможностью принудительного перевода из нерабочего, например вне лестничных маршей, верхнего положения в рабочее, главным образом на лестничных маршах, нижнее положение с качением роликов по ступени или иной опорной поверхности рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью или иной опорной поверхностью более низкого уровня, и подпружиненные с возможностью фиксации в нерабочем верхнем своем положении силами упругости пружин, а также содержащем пары пассивных и активных элементов, последние из которых связаны с упомянутыми рычагами, взаимодействующих друг с другом и препятствующих вращению колес во включенном состоянии тормоза, при взаимосвязи активных элементов при входе рычага в заданный диапазон углов его поворота вниз до предельного значения, соответствующего заданному предельному значению снижения уровня опоры под роликом рычага, каждая пара пассивного и активного элементов выполнена в виде храпового механизма, зубчатое колесо которого жестко связано с колесом транспортного средства, а собачка шарнирно закреплена на рычаге и нормально выведена из зацепления с зубчатым храповым колесом посредством возвратного упругого элемента, на каждом рычаге шарнирно установлен двуплечий дополнительный рычаг, одно плечо которого направлено назад-вверх и свободным концом находится в контакте с тыльной стороной собачки, а другое плечо направлено вперед-вниз, поджато упомянутым возвратным упругим элементом к упору на раме, служащему ограничителем поворота дополнительного рычага, и снабжено своим опорным роликом на свободном конце, так что опорный ролик расположен над общей горизонтальной плоскостью, касательной к нижним точкам колеса и ролика рычага, с возможностью силового контакта с опорной поверхностью при входе рычага в заданный диапазон углов его поворота вниз до упомянутого предельного значения и с возможностью силового воздействия при этом дополнительного рычага на собачку против силы упругости ее возвратного элемента и, вследствие этого, включения храпового механизма.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- в нем ось шарнира крепления рычага на раме и ось храпового колеса могут быть соосны колесу транспортного средства;
- в нем дополнительный рычаг может быть выполнен Г-образным и находиться в контакте с собачкой посредством винта регулировки зазора между ними;
- при предыдущей совокупности признаков упор-ограничитель поворота дополнительного рычага может быть выполнен в виде полки, нависающей с клиновым зазором над рычагом.
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
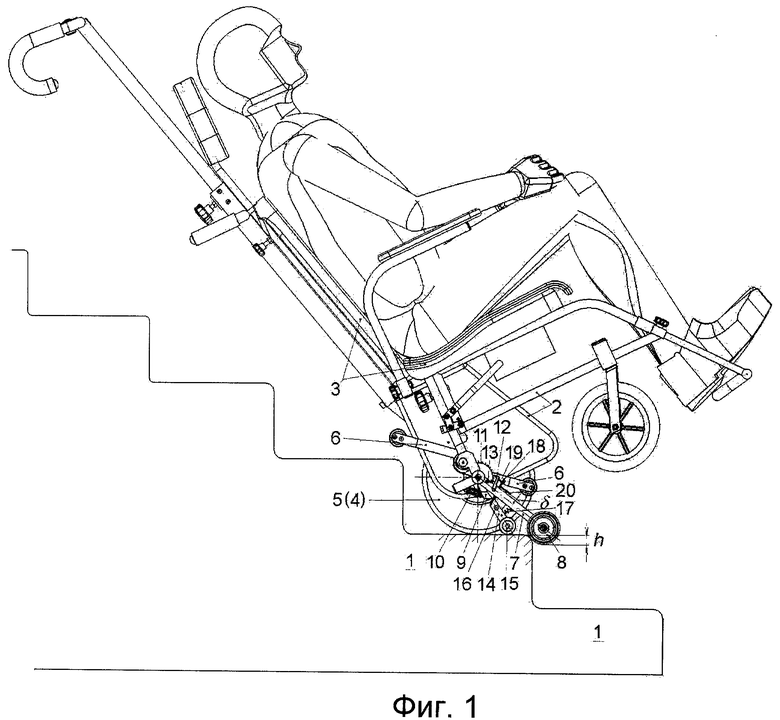
Более подробно сущность изобретения раскрывается в приведенном ниже примере реализации и иллюстрируется чертежами, на которых представлено: на фиг.1 - транспортное средство (коляска - лестничный подъемник) с автоматическими тормозами колес, вид сбоку, в момент схода роликов рычагов со ступени, где h - снижение уровня опорной поверхности под роликом от уровня опоры колеса (перепад уровней); δ - клиновой зазор между полкой дополнительного рычага и рычагом; на фиг.2 - автоматические тормоза (как фрагмент транспортного средства), вид сбоку-спереди-сверху.
Автоматический тормоз (стопор) транспортного средства (как конкретный пример конструктивного выполнения устройства, на примере тормоза одного борта, т.к. в двухтормозном варианте тормоза идентичны), преимущественно инвалидной коляски (кресла-коляски), приспособленной для перемещения с человеком-пользователем (см. фиг.1) или грузов по лестницам со ступенями 1 и имеющей раму 2, кресло 3 для размещения пользователя, колеса 4, 5 по бортам и шагающий движитель 6 рычажного типа (между колесами, с электромеханическим приводом), содержит рычаг 7 («рычаг транспортного средства») с опорным роликом 8 на свободном его конце. Рычаг 7 шарнирно установлен на раме 2 и направлен вперед-вниз перед колесом 4 (5), с возможностью силового контакта (под действием как минимум собственной силы тяжести) с горизонтальной опорной поверхностью под колесом 4 и поворота вниз (на чертежах - по часовой стрелке) при понижении уровня опоры под роликом 8. В состав тормоза входят также (фиг.2): ограничитель 9 поворота рычага 7 вниз (по часовой стрелке), и упругий элемент, например пружина 10 («пружина рычага»), оттягивающая рычаг 7 вниз (с обеспечением силы упругости в дополнение к упомянутой силе тяжести рычага 7).
В тормозе предусмотрен храповой механизм, при этом зубчатое храповое колесо 11 жестко соединено с колесом 4, а собачка 12 шарнирно закреплена на рычаге 7 и нормально выведена из зацепления с храповым колесом 11 («нормально» значит вне зацепления при выключенном тормозе) посредством возвратного упругого элемента 13 и двуплечего дополнительного рычага 14 со своим опорным роликом 15 на свободном конце одного из плеч. При этом дополнительный рычаг 14 выполнен, преимущественно, Г-образным и шарнирно (шарнир 16) установлен на рычаге 7 так, что его плечо с роликом 15 направлено (ориентировано) вперед-вниз, ролик 15 расположен над общей горизонтальной плоскостью, касательной к нижним точкам колеса 4 и ролика 8. Кроме того, дополнительный рычаг 14 связан с упругим элементом, например пружиной, 17, стремящейся повернуть его по часовой стрелке (с нижним ограничением угла поворота посредством упора - см. далее). Возможна передача функции упругого элемента 17 упругому элементу 13. В этом случае элемент 17 исключается из конструкции. Другое же плечо 18 дополнительного рычага 14 направлено (ориентировано) назад-вверх и свободным концом находится в контакте с тыльной стороной собачки 12.
Таким образом, тормоз выполнен с возможностью срабатывания (включения) при снижении уровня опорной поверхности (ступени) под роликом 8 от уровня опоры колеса 4 больше заданного (геометрическими соотношениями составных элементов тормоза и регулировками зазоров) значения h*, в частности при перепаде h на высоту ступени 1 преодолеваемой лестницы.
Ролик 15 вывешен над общей горизонтальной опорной поверхностью колеса 4 и ролика 8 (на чертежах совпадает с опорной поверхностью ступени 1), с возможностью силового контакта с указанной опорной поверхностью при входе рычага 7 в заданный диапазон углов его поворота вниз (по часовой стрелке) до предельного значения h*, и с возможностью силового воздействия при этом на собачку 12 против силы упругости ее возвратного элемента 13 и, вследствие этого, включения храпового механизма.
Ось шарнира крепления рычага 7 на раме 2 и ось храпового колеса 11 могут быть соосны колесу 4.
Дополнительный рычаг 14 может находиться в контакте с собачкой 12 посредством винта (позицией не обозначен, но заметен на фиг.2) регулировки зазора между ними.
При этом на свободном конце плеча 18 может быть предусмотрена полка-ограничитель 20 поворота рычага 14 вниз (по часовой стрелке) относительно рычага 7 (клиновой зазор δ), как частный случай ограничителя поворота рычага 14.
Геометрические соотношения (форма и размеры) элементов тормоза выбирают (задают) из условия обеспечения срабатывания тормоза (стопорения колеса 4) на безопасном (по условию динамической устойчивости транспортного средства) расстоянии от кромки ступени 1. Расчет (геометрический и динамический) производится в каждом конкретном случае (для конструктивного варианта-изделия) и в каких-либо новых, особенных методических приемах и рекомендациях не нуждается, хотя и может, в принципе, содержать ноу-хау.
Описанный пример конкретного варианта конструкции не исключает других возможных вариантов устройства в рамках заявляемой совокупности существенных конструктивных признаков (см. формулу изобретения).
Заявляемое устройство работает следующим образом.
При движении транспортного средства вниз по лестнице (т.е. в режиме спуска) за счет шагающего рычажного движителя 6 колесо 4 часть времени катится по ступени 1. По этой же ступени 1, но впереди колеса 4, катится ролик 8, оказывая на нее давление под действием силы упругости пружины 10 и силы тяжести - рычага 7 с роликом 8 (как гарантия контактного «отслеживания» рельефа лестницы в пределах, разумно достаточных для выполнения функционального назначения тормоза). В то же время, ролик 15 дополнительного рычага 14 вывешен над ступенью 1 благодаря подобранному для конкретного изделия геометрическому соотношению элементов устройства и упору полки 20 в рычаг 7 (зазор δ=0).
Неизбежные в эксплуатационных условиях текущие временные изменения (увеличения и уменьшения) угла наклона рамы 2 в продольной вертикальной плоскости (т.е. вперед и назад соответственно) не влекут за собой позднего или раннего (по отношению к заложенному в конструкцию, что оговорено выше в разделе «устройство») включения тормоза, поскольку поворот рамы 2 относительно рычага 7 при наличии (и только при наличии) дополнительного рычага 14 описанной конструкции и расположения в транспортном средстве, не приводит к изменению (удалению или сближению соответственно) зуба собачки 12 с храповым колесом 11, а значит, и к включению храпового механизма.
При сходе ролика 8 со ступени 1 рычаг 7 под действием тех же сил (упругости пружины 10 и сил тяжести) движется вниз (поворачивается на своем шарнире) по часовой стрелке, увлекая за собой (по дуге меньшего радиуса) основание (шарнир 16) дополнительного рычага 14. Начиная с момента контакта ролика 15 со ступенью 1 между пятнами контактов «колесо 4 - ступень 1» и «ролик 8 - ступень 1», автоматически происходит относительный поворот рычага 14 и рычага 7 в сторону уменьшения угла между ними (рычаг 7 поворачивается по часовой стрелке при неизменном угле наклона рычага 14). Конец плеча 18 рычага 14 толкает впереди себя собачку 12 вплоть до входа ее свободного конца (по принятой для храповых механизмов терминологии - клювика) в ближайший зазор между зубьями колеса 11 в момент достижения критического значения перепада высот нижних точек колеса 4 и ролика 8: h=h*.
Текущие временные изменения угла наклона рамы 2 вперед и назад и в этом режиме не влекут за собой опережения или запаздывания включения тормоза (и тем более не включения вообще), поскольку при этом храповое колесо 11 свободно поворачивается относительно собачки 12.
При одинаковой настройке регулировочных зазоров 19 и одинаковых рельефах поверхности по левому и правому бортам транспортного средства (под колесом 4 и роликами 8 его тормоза с одной стороны, и колесом 5 и роликами 8 его тормоза с другой стороны) оба колеса (4 и 5) стопорятся не только практически мгновенно, но и одновременно, что является гарантией надежности тормозов, не зависит от других внешних вышеперечисленных факторов, влияющих обычно на создание силы трения в тормозных парах фрикционного типа.
С поворотом рычагов шагающего движителя 6 в положение безопасного, устойчивого положения транспортного средства на рычагах (после чего колесо 4 отрывается от ступени 1 и переносится вперед-вверх-вниз) ролик 15 также (как и ролик 8) сходит с кромки ступени 1 и зависает над следующей ступенью. При этом рычаг 14 снова садится, под действием своей (и собачки 12) возвратной пружины 13, вместе с собачкой 12, в исходное положение. Тормоз выключается.
При опоре ролика 8 на очередную ступень рычаг 7 поворачивается, за счет превышения составляющих сил тяжести части транспортного средства над противоположно направленными составляющими силы упругости возвратного упругого элемента и силы тяжести рычага 7 с роликом 8, вверх (против часовой стрелки), не вызывая срабатывания храпового механизма по причине свободной вывески рычага 14.
При косозубом колесе 11 храповой механизм, традиционно для его возможностей, позволяет двигаться транспортному средству задним ходом.
Ближайшее включение тормоза произойдет в той же фазе движения по очередной ступени, что и при движении по предыдущей.
При желании, в некоторых, относительно благоприятных условиях эксплуатации (ровная опорная поверхность), рычаг 7 может быть принудительно переведен в нерабочее свое положение путем ручного подъема вверх и автоматической фиксации пружиной 10.
При движении транспортного средства по горизонтальной поверхности с единичными профильными препятствиями, главным образом ямами, выбоинами, трещинами, тормоз работает аналогично описанному. При этом роль кромки ступени 1 в «рубежном провале» ролика 8 берут на себя края перечисленных препятствий.
Использование изобретения позволяет существенно повысить эксплуатационную надежность автоматического тормоза транспортного средства (преимущественно инвалидной коляски, приспособленной для перемещения по лестницам) в широком спектре условий эксплуатации, за счет обеспечения автоматического стопорения колеса, меньшей зависимости от внешних условий, одинакового стопорного эффекта по бортам транспортного средства и независимости от угла продольного наклона рамы транспортного средства. То есть достичь заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ И НА ЭСКАЛАТОРАХ | 2012 |
|
RU2510347C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ ПОДЪЕМА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2570504C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| Устройство, обеспечивающее безопасность инвалидной коляски при подъёме | 2022 |
|
RU2787981C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2005 |
|
RU2304952C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Складная аппарель бытового и эвакуационного назначения | 2015 |
|
RU2610937C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
Изобретение относится к транспортным средствам, а именно к тормозам транспортного средства, автоматически приводимым в действие при потере контакта с опорной поверхностью. Автоматический тормоз содержит рычаги с опорными роликами на своих свободных концах, шарнирно установленные на раме транспортного средства сбоку-спереди колес транспортного средства с возможностью принудительного перевода из нерабочего, например вне лестничных маршей, верхнего положения в рабочее, главным образом на лестничных маршах, нижнее положение с качением роликов по ступени или иной опорной поверхности рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью или иной опорной поверхностью более низкого уровня, и подпружиненные с возможностью фиксации в нерабочем верхнем своем положении силами упругости пружин. Также содержит пары пассивных и активных элементов, последние из которых связаны с упомянутыми рычагами, взаимодействующие друг с другом и препятствующие вращению колес во включенном состоянии тормоза, при взаимосвязи активных элементов при входе рычага в заданный диапазон углов его поворота вниз до предельного значения, соответствующего заданному предельному значению снижения уровня опоры под роликом рычага. Каждая пара пассивного и активного элементов выполнена в виде храпового механизма, зубчатое колесо которого жестко связано с колесом транспортного средства, а собачка шарнирно закреплена на рычаге и нормально выведена из зацепления с зубчатым храповым колесом посредством возвратного упругого элемента. На каждом рычаге шарнирно установлен двуплечий дополнительный рычаг, одно плечо которого направлено назад-вверх и свободным концом находится в контакте с тыльной стороной собачки, а другое плечо направлено вперед-вниз, поджато упомянутым возвратным упругим элементом к упору на раме, служащему ограничителем поворота дополнительного рычага. Плечо снабжено своим опорным роликом на свободном конце, так что опорный ролик расположен над общей горизонтальной плоскостью, касательной к нижним точкам колеса и ролика рычага, с возможностью силового контакта с опорной поверхностью при входе рычага в заданный диапазон углов его поворота вниз до упомянутого предельного значения и с возможностью силового воздействия при этом дополнительного рычага на собачку против силы упругости ее возвратного элемента и, вследствие этого, включения храпового механизма. Заявленное изобретение обеспечивает автоматический стопор колеса, меньшую зависимость от внешних условий, одинаковый стопорный эффект по бортам транспортного средства, независимость от угла продольного наклона рамы транспортного средства. 3 з.п. ф-лы, 2 ил.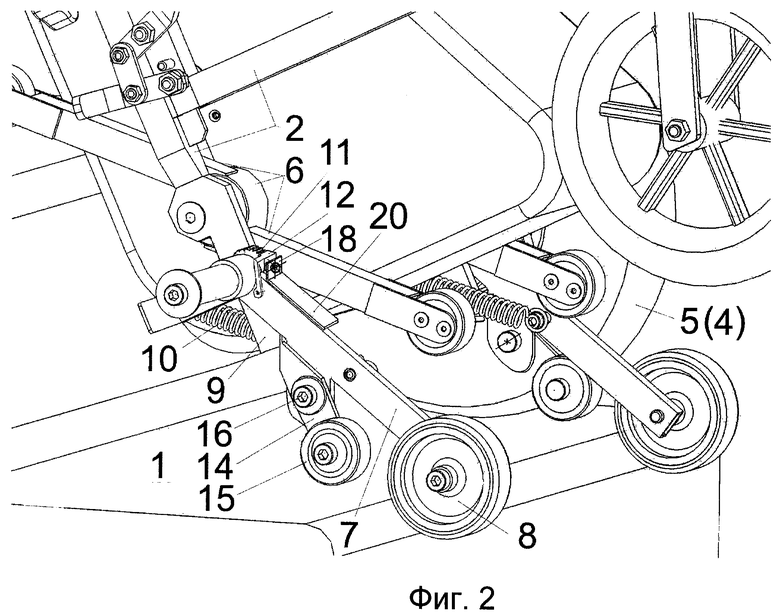
1. Автоматический тормоз транспортного средства, преимущественно, для перемещения человека по лестницам, содержащий рычаги с опорными роликами на своих свободных концах, шарнирно установленные на раме транспортного средства сбоку-спереди колес транспортного средства с возможностью принудительного перевода из нерабочего, например вне лестничных маршей, верхнего положения в рабочее, главным образом на лестничных маршах, нижнее положение с качением роликов по ступени или иной опорной поверхности рядом с колесами и последующего срыва под действием, по меньшей мере, собственной силы тяжести и зависания над нижестоящей ступенью или иной опорной поверхностью более низкого уровня, и подпружиненные с возможностью фиксации в нерабочем верхнем своем положении силами упругости пружин, а также содержащем пары пассивных и активных элементов, последние из которых связаны с упомянутыми рычагами взаимодействующих друг с другом и препятствующих вращению колес во включенном состоянии тормоза, при взаимосвязи активных элементов при входе рычага в заданный диапазон углов его поворота вниз до предельного значения, соответствующего заданному предельному значению снижения уровня опоры под роликом рычага, отличающийся тем, что каждая пара пассивного и активного элементов выполнена в виде храпового механизма, зубчатое колесо которого жестко связано с колесом транспортного средства, а собачка шарнирно закреплена на рычаге и нормально-выведена из зацепления с зубчатым храповым колесом посредством возвратного упругого элемента, на каждом рычаге шарнирно установлен двуплечий дополнительный рычаг, одно плечо которого направлено назад-вверх и свободным концом находится в контакте с тыльной стороной собачки, а другое плечо направлено вперед-вниз, поджато упомянутым возвратным упругим элементом к упору на раме, служащему ограничителем поворота дополнительного рычага, и снабжено своим опорным роликом на свободном конце, так что опорный ролик расположен над общей горизонтальной плоскостью, касательной к нижним точкам колеса и ролика рычага, с возможностью силового контакта с опорной поверхностью при входе рычага в заданный диапазон углов его поворота вниз до упомянутого предельного значения и с возможностью силового воздействия при этом дополнительного рычага на собачку против силы упругости ее возвратного элемента и, вследствие этого, включения храпового механизма.
2. Тормоз по п.1, отличающийся тем, что в нем ось шарнира крепления рычага на раме и ось храпового колеса соосны колесу транспортного средства.
3. Тормоз по п.1, отличающийся тем, что в нем дополнительный рычаг выполнен Г-образным и находится в контакте с собачкой посредством винта регулировки зазора между ними.
4. Тормоз по п.3, отличающийся тем, что упор-ограничитель поворота дополнительного рычага выполнен в виде полки, нависающей с клиновым зазором над рычагом.
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| ИНВАЛИДНАЯ КОЛЯСКА ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЛЕСТНИЦАМ | 1996 |
|
RU2102957C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ДВИЖЕНИЯ, В ЧАСТНОСТИ, ПО ЛЕСТНИЦАМ | 2005 |
|
RU2312788C2 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ | 0 |
|
SU174475A1 |
| Тормозной механизм | 1979 |
|
SU775469A1 |
| СПОСОБ ГИДРИРОВАНИЯ ОЛЕФИНОВ И КИСЛОРОДСОДЕРЖАЩИХ СОЕДИНЕНИЙ В СОСТАВЕ СИНТЕТИЧЕСКИХ ЖИДКИХ УГЛЕВОДОРОДОВ, ПОЛУЧЕННЫХ ПО МЕТОДУ ФИШЕРА-ТРОПША, И КАТАЛИЗАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2446136C1 |

