Изобретение относится к области наземного безрельсового транспорта, конкретно к инвалидным коляскам и роботам, способным перемещаться по лестницам и преодолевать профильные препятствия типа ступени, с устройствами стабилизации курсовой устойчивости.
Одной из проблем вышеназванных транспортных средств является вынужденная борьба с курсовой нестабильностью движения шасси вверх по ступеням - как одиночном препятствиям, так и в составе лестничных маршей. Курсовые отклонения («рыскание») транспортного средства при преодолении ступени (ступеней) вызываются большим числом факторов как внешней среды (ограниченность пространства для предварительного маневра, некачественные опорная поверхность и геометрия ступени как профильного препятствия, неоднородность коэффициентов сопротивления и сцепления ходовой части с опорной поверхностью), так и особенностями самого транспортного средства (неодинаковость тяговых сил по «бортам», асимметрия развесовки по «бортам») и «человеческим фактором» (несовершенство вождения, необразованность в отдельных вопросах, недооценка ситуации, слабость или неустойчивость психики).
В приложении к реабилитационной технике (инвалидным коляскам) это особенно актуально, поскольку напрямую связано с обеспечением безопасности инвалида или иного пользователя с ограниченными физическими возможностями.
Для роботов и робототехнических комплексов проблема связана с возрастанием требований к искусственному интеллекту и недостатками дистанционного наблюдения оператором посредством, например, телевизионных камер.
Наиболее распространен способ стабилизации курса движения с использованием механизмов поворота. Так, отклонение от курса гусеничного транспортного средства, снабженного механизмом поворота, допускающего дифференцированное управление левым и правым «бортами» шасси, компенсируют замедлением забежавшей гусеницы вплоть до нулевой скорости или ускорением отставшей гусеницы.
Широко известен, например, механизм поворота с бортовыми фрикционами и тормозами, за счет которых достаточно просто корректировать курс [Расчет и конструирование гусеничных машин. / Носов Н.А., Галышев В.Д., Волков Ю.П., Харченко А.П. - Л.: Машиностроение, 1972. - 560 с. - С.360-361, Рис.IX.6; Катунский A.M. Вождение танков. - М.: Воениздат, 1976. - 174 с. - С.13-15, 63-66, рис.17-19].
Однако, во-первых, далеко не на всех транспортных средствах интересующего нас здесь класса постановка таких механизмов целесообразна. Во-вторых, автоматизация «бортового» способа поворота такого типа сопряжена с характерным для комплексной автоматизации гусеничных и колесных машин вообще применением электронных схем и датчиков, в конечном счете, существенным усложнением и удорожанием.
Наиболее близким к заявляемому изобретению по назначению и совокупности существенных конструктивных признаков (ближайшим аналогом) является автоматический тормоз транспортного средства, преимущественно инвалидной коляски, приспособленной для перемещения по лестницам, содержащий разнесенные попарно по ширине шасси подпружиненные левые и правые тормозные рычаги с левыми и правыми подпружиненными тормозными парами, установленные с возможностью независимого друг от друга поворота тормозных рычагов, в продольных вертикальных плоскостях на шарнирах с общей поперечной осью под действием сил реакции их взаимодействия со ступенью, и с возможностью независимого бортового торможения шасси при заданном угловом положении тормозных рычагов за счет автоматического включения тормозных пар, при этом в состав шасси входят рама, движитель и энергосиловая установка [RU 2459605, B60T 7/12, 27.08.2012].
Представленное как «Автоматический тормоз», это устройство является, одновременно, стабилизатором курса движения шасси транспортного средства по ступеням. Автоматическим или полуавтоматическим.
В нем между каждой ступицей (барабаном) движителя (ведущего колеса) и основанием соответствующего рычага (точнее - посредством дополнительной рычажной системы) предусмотрены тормозная пара (в частности, ленточный тормоз: лента-барабан) с возвратной (оттяжной) пружиной, с возможностью:
- свободного синхронного поворота рычагов (вниз), с дополнительной рычажной системой, в одинаковых условиях взаимодействия с горизонтальной (опорной) поверхностью ступени (при понижении или исчезновении опоры для них, как правило, зависания рычагов при сходе со ступени) и, вследствие этого, автоматического синхронного включения тормозных пар движителей (ведущих колес) обоих бортов при заданном угловом положении рычагов;
- свободного поворота только одного рычага (вниз), с дополнительной рычажной системой, в неодинаковых условиях взаимодействия с горизонтальной (опорной) поверхностью ступени, а именно - при опережающем понижении или исчезновении опоры только для указанного зависшего при сходе со ступени первым и, вследствие этого, автоматического включения тормозной пары одного, забегающего борта при заданном угловом положении «забегающего» рычага.
Рычаги снабжены опорными роликами на свободных концах и расположены перед осями опорных ведущих элементов движителя (впереди и ниже их).
Однако основным назначением известного ближайшего аналога является, по существу, автоматическое «подстраховочное» торможение (экстренный останов) транспортного средства (его шасси) в конце ступени в режиме спуска по лестнице. Это совокупность двух бортовых индивидуальных независимых тормозов непосредственно ведущих элементов движителя (ведущих колес), автоматически срабатывающих при зависании (под действием собственной силы тяжести зависшего рычага и, как вариант, дополнительной прижимной пружины в условиях исчезновения реакции ступени). В случае курсового отклонения по азимуту от продольной нормали к кромке ступени будет однозначно заторможена одна «бортовая» часть движителя (ведущее колесо) забегающего борта. Стабилизировать шасси по курсу (т.е. ликвидировать возникший «перекос») возможно только при продолжающемся вращении другой «бортовой» части движителя (ведущего колеса) - на отстающем борту. Если предусмотрен только зависимый привод к движителю от энергосиловой установки (наиболее распространенный вариант применительно к инвалидным коляскам и др. транспортным средствам для самостоятельного перемещения по лестницам), то автоматическая стабилизация невозможна: шасси останется в «перекошенном» положении, а попытки стабилизировать курс силовым способом могут привести к смещению забежавшего «борта» вперед юзом и срыву со ступени, по крайней мере, отставшим «бортом». Следовательно, стабилизация возможна только при независимом приводе или в режиме ручной коляски, транспортируемой ассистентом.
В любом случае, известный ближайший аналог работает исключительно на спуск со ступени(ей). В режиме подъема вверх он бесполезен как средство стабилизации курса.
Все это обусловливает недостаточно высокие технико-эксплуатационные характеристики (ТЭХ) транспортных средств на базе таких шасси в части курсовой устойчивости подъема на поребрики, ступени, по лестничным маршам, в части эксплуатационной безопасности, особенно в отношении транспорта для инвалидов.
Задачей, на решение которой направлено заявленное изобретение, является повышение ТЭХ транспортных средств на базе шасси, приспособленных для преодоления ступеней (в том числе лестничных маршей), путем обеспечения автоматической стабилизации курса движения при подъеме на ступень(ни).
Решение поставленной задачи достигается тем, что стабилизатор курса движения шасси транспортного средства по ступеням, содержащий разнесенные попарно по ширине шасси, подпружиненные левые и правые тормозные рычаги с левыми и правыми подпружиненными тормозными парами, установленные с возможностью независимого друг от друга поворота тормозных рычагов, в продольных вертикальных плоскостях на шарнирах с общей поперечной осью под действием сил реакции их взаимодействия со ступенью, и с возможностью независимого бортового торможения шасси при заданном угловом положении тормозных рычагов за счет автоматического включения тормозных пар, при этом в состав шасси входят несущая конструкция с бортами, движитель и энергосиловая установка, поперечная ось установлена враспор между бортами несущей конструкции, коаксиально ей на подшипниках установлен разрезной наискось вал, образующий бортовые, подпружиненные парой распорных возвратных пружин в осевом направлении и парой распорных возвратных пружин в повороте тормозных рычагов вокруг оси, полувалы с упорным подшипником на их стыке в указанном косом разрезе, каждая тормозная пара встроена между соответствующими полувалом и опорным элементом несущей конструкции шасси, а тормозные рычаги прикреплены своими основаниями к полувалам и поджаты, через полувалы, второй из упомянутых пар пружин к упорам-ограничителям поворота, с возможностью синхронного поворота левых и правых тормозных рычагов с полувалами в одинаковых условиях взаимодействия со ступенью (фронтальной ее поверхностью - кромкой или стенкой) и с возможностью осевой раздвижки полувалов в неодинаковых условиях взаимодействия со ступенью и, вследствие этого, автоматического синхронного включения тормозных пар обоих бортов при заданном минимально-допустимом курсовом отклонении шасси от продольной нормали к кромке ступени.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- полувалы могут быть выполнены одинаковыми (это обеспечивает взаимозаменяемость, сокращает номенклатуру деталей, снижает себестоимость стабилизатора и тем самым в большей мере повышает ТЭХ шасси и транспортного средства в целом);
- тормозные пары могут быть выполнены дисковыми (этим оптимизируется компактность и простота конструкции, используется оптимальная геометрия для данной кинематики);
- тормозные рычаги могут быть выполнены изогнутыми и установлены с ориентацией вогнутости по ходу движения шасси на ступень (это позволяет обеспечить контакт роликов с фронтальной поверхностью ступени, т.е. ее фронтальной поверхностью - кромкой или стенкой, в течение всего периода подъема движителя на эту ступень до устойчивого положения на ней, исключить «плавающий» контакт рычагов с фронтальной поверхностью ступени);
- тормозные рычаги могут быть выполнены с возможностью сохранения положения пятен своего контакта со ступенью в поперечном направлении при боковом уводе оснований рычагов относительно ступени (это позволяет скомпенсировать, например за счет поперечного наклона тормозного рычага, сопротивление осевому перемещению полувалов, необходимому для включения тормозных пар, со стороны «паразитной» поперечно направленной силы трения ролика или непосредственно рычага с фронтальной поверхностью ступени);
- при предыдущей совокупности признаков тормозные рычаги могут быть выполнены пластинчатыми, с возможностью изгиба при поперечном смещении его основания (это позволяет осуществить упомянутую выше компенсацию сопротивления включению тормозных пар за счет силового изгиба тормозного рычага, что конструктивно проще альтернативных вариантов);
- в стабилизаторе могут быть дополнительно предусмотрены фланцы с возможностью их жесткого разъемного соединения с несущей конструкцией шасси, жестко и разъемно соединенные с концами упомянутой оси, при этом неподвижные части тормозных пар должны быть закреплены на обращенных к полувалам торцах фланцев, которые при установке на шасси будут выступать в качестве опорных элементов его несущей конструкции (это - оптимальный вариант с позиции как обеспечения разгрузки несущей конструкции шасси от значительных «распорных» сил в стабилизаторе, поскольку реализует принцип механически замкнутой системы, где в данном его приложении «распорные» силы замыкаются на ось, входящую в состав стабилизатора, так и с позиции принципов «моноблочности», агрегатирования, где в данном случае стабилизатор представляет собой быстросъемное устройство);
- стабилизатор может быть установлен вблизи центра масс транспортного средства (этим достигается максимальный стабилизирующий момент, равный произведению свободной тяговой силы на отставшем борту на колею шасси, за счет наибольшего сцепного веса в пятнах контакта «движитель-ступень» под центром масс транспортного средства с полезной нагрузкой).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Более подробно сущность изобретения раскрывается в приведенном ниже примере реализации и иллюстрируется чертежами:
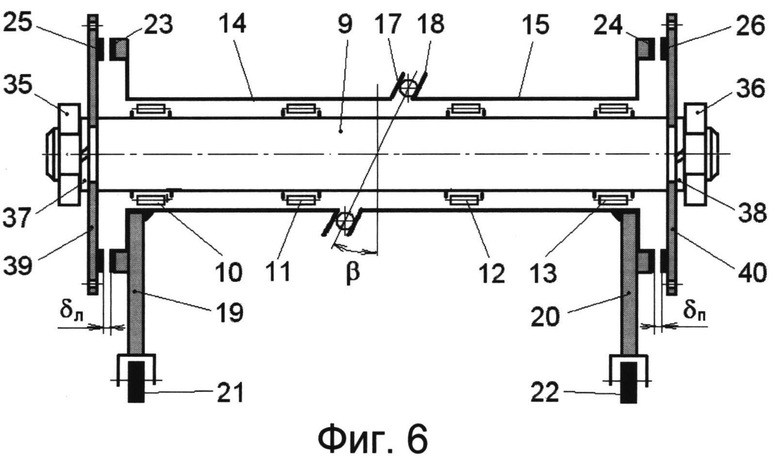
на фиг.1 схематически показан заявляемый стабилизатор, вид сзади в поперечном разрезе гусеничного шасси, где b - ширина стабилизатора (она же - расстояние между внутренними поверхностями бортов шасси в месте расположения стабилизатора; β - угол наклона плоскости разреза поперечного вала стабилизатора на полувалы к продольной оси шасси; δл, δп - зазоры в не включенных тормозных парах стабилизатора, левой (по левому борту) и правой (по правому борту) соответственно; αл, αп - текущие углы поворота соответственно левого и правого рычагов стабилизатора, являющихся датчиками курсовой стабильности; Fл, Fп - векторы сил, левой и правой соответственно, распирающих полувалы стабилизатора с синхронным включением его тормозных пар при ненулевой разности углов поворота (αл-αп);
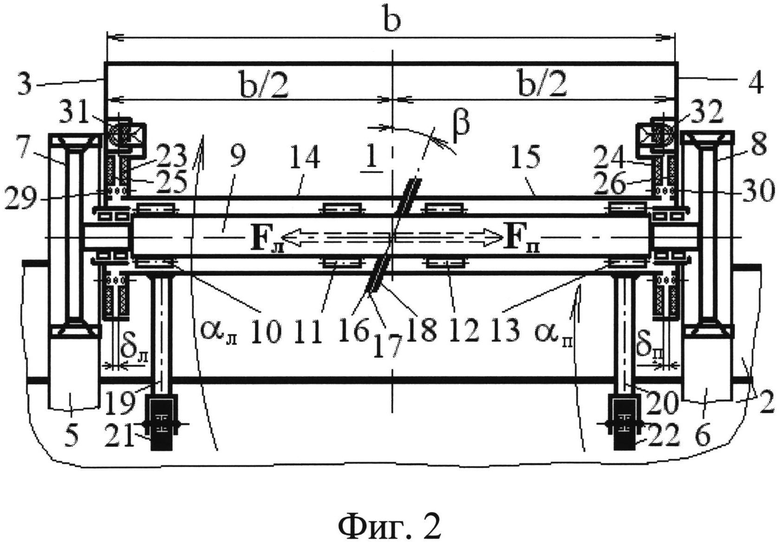
на фиг.2 - то же, вариант с совмещением оси стабилизатора с общей осью ведомых колес шасси;
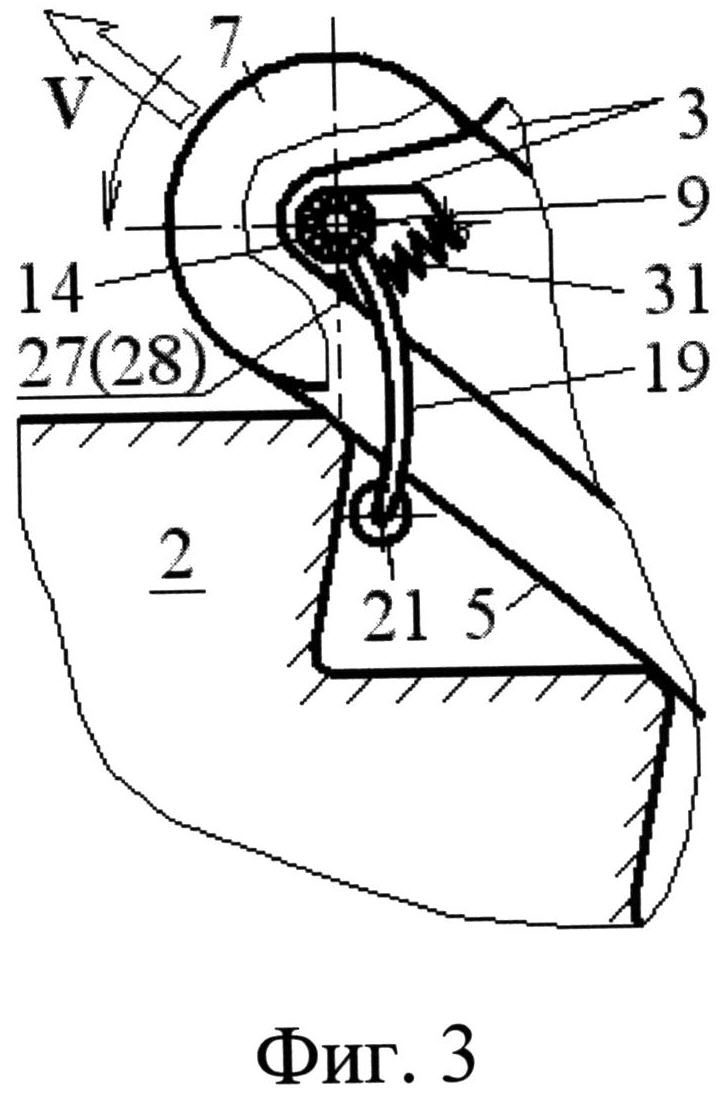
на фиг.3 - схема взаимодействия рычага стабилизатора со ступенью лестницы, вид сбоку (слева);
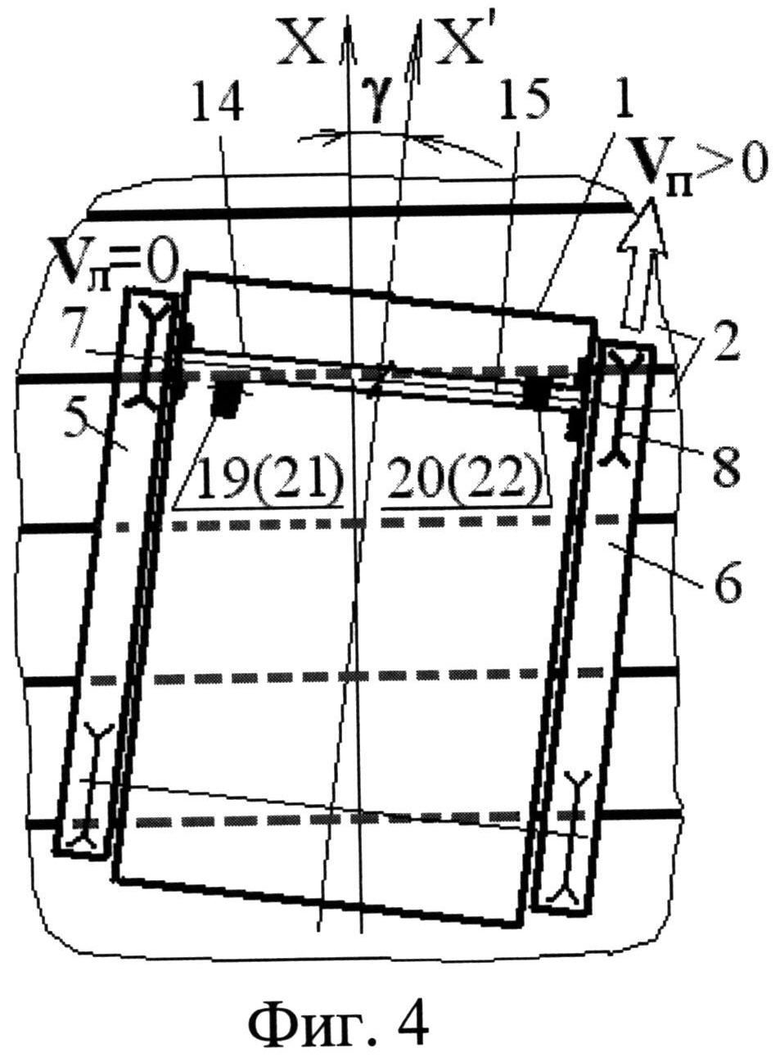
на фиг.4 - схема автоматической стабилизации курсовой устойчивости гусеничного шасси при подъеме на лестничном марше, вариант расположения стабилизатора спереди по движению, где X - потребный (заданный) курс (направление) движения шасси (по нормали к кромке ступени); X′ - фактический текущий курс (направление) движения шасси; γ - текущее угловое (по азимуту) отклонение шасси от потребного (заданного) курса; Vл, Vп - векторы скорости подъема соответственно левого и правого бортов шасси на лестничном марше;
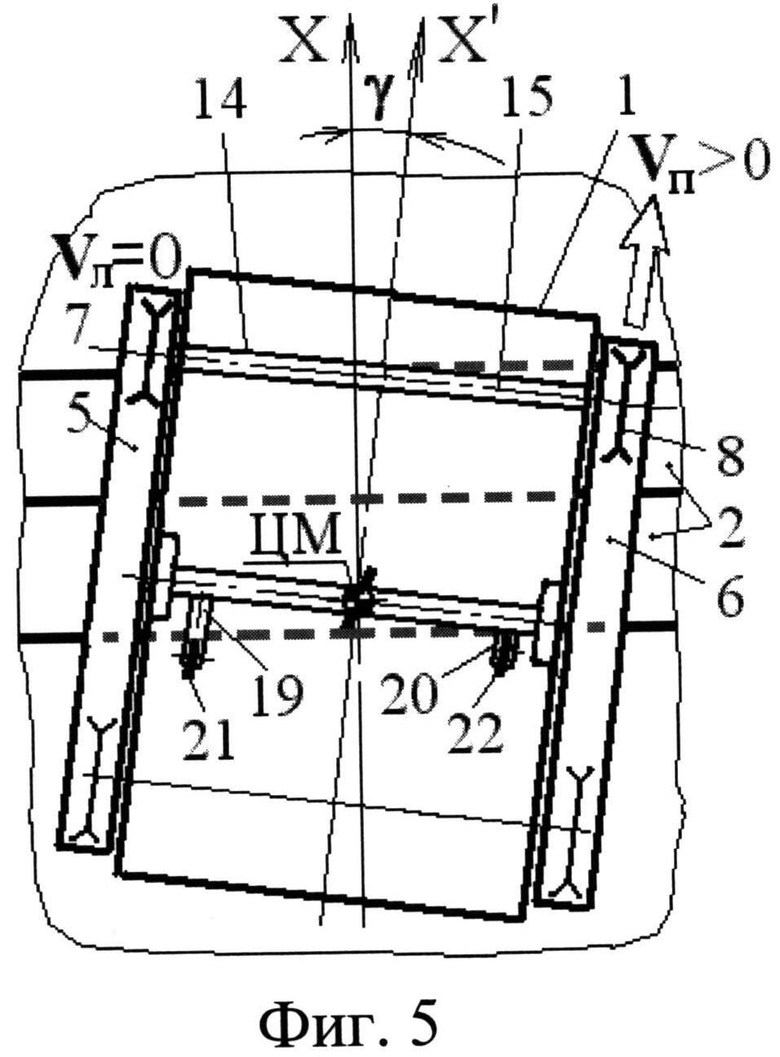
на фиг.5 - то же, вариант расположения стабилизатора в центральной части шасси, вблизи центра масс, где ЦМ - центр масс транспортного средства;
на фиг.6 - схема «моноблочного» стабилизатора.
Шасси 1 транспортного средства, способного самостоятельно преодолевать профильные препятствия в виде лестниц и отдельных ступенчатых профильных препятствий 2 (ступеней, бордюрных камней и эскарпов/контрэскарпов), содержит (см. фиг.1-4) несущую конструкцию (несущий корпус с жесткими, плоскими, параллельными продольной вертикальной плоскости шасси элементами - бортами 3, 4 (левым и правым) или несущую раму с аналогичными бортами 3, 4. В состав шасси 1 входит также движитель (в данном примере - гусеничный) с приводом от энергосиловой установки (центральной или бортовых, в том числе мотор-колес - не показаны), с гусеницами 5, 6, с ведущими и ведомыми колесами (в данном примере условно показаны ведомые зубчатые колеса - «ленивцы» 7, 8, а ведущие показаны на фиг.3 ниже «ленивцев» 7, 8).
На шасси 1 между бортами 3, 4 установлен заявляемый автоматический, полностью механический стабилизатор курса движения шасси 1 по ступеням 2 (см. фиг.1-3). Он включает в себя поперечно установленную враспор между бортами 3 и 4 ось 9 (ее длина соразмерна расстоянию между бортами 3 и 4), установленный на оси 9 коаксиально, посредством подшипников (подшипниковых опор) 10, 11 и 12, 13, разрезной наискось под острым углом β вал, образующий бортовые полувалы 14, 15 (предпочтительно, одинаковые) с упорным подшипником 16-18 (скольжения или качения, где, в варианте с подшипником качения, 16 и 18 - левая и правая обоймы, а 17 - шарики или иные тела качения, возможно в сепараторе) на их стыке (т.е. между ними), одинаковых левом и правом тормозных рычагов 19, 20, бортовых, одновременно срабатывающих, тормозных пар (с возможностью торможения вращения полувалов 14, 15) и возвратных пружин поворота полувалов 14, 15.
Рычаги 19 и 20, являющиеся по своему функциональному назначению датчиками курсовой стабильности шасси и, одновременно, его «бортовыми якорями», прикреплены к полувалам 14 и 15 соответственно и имеют длину, достаточную для взаимодействия с фронтальной поверхностью и кромкой ступени 2 в течение всего периода подъема соответствующей «бортовой» части движителя (гусеницы 5 и/или 6) на эту ступень 2 до устойчивого положения на ней. Они установлены, в рабочем своем положении, под одинаковыми начальными углами αл0, αп0 (в продольных вертикальных плоскостях шасси 1 на максимально возможном, равном расстоянии от центральной продольной его плоскости, т.е. максимально разнесены по ширине b бортов) с ориентацией свободных концов вниз-назад по ходу шасси 1 на ступень 2 (или вперед-вверх на лестничном марше).
На свободных концах рычагов 19 и 20 могут быть шарнирно установлены ролики 21 и 22 соответственно. При этом рычаги 19, 20 могут быть выполнены изогнутыми, вогнутостью в сторону направления всхода на ступень 2 (см. фиг.3), т.е. с обеспечением контакта роликов 21, 22 с фронтальной поверхностью ступени 2 в течение всего периода подъема соответствующей «бортовой» части движителя (гусеницы 5 и/или 6) на эту ступень до устойчивого положения на ней, исключения «плавающего» контакта рычагов 19, 20 с кромкой ступени 2.
Крепление рычагов 19, 20 к полувалам 14, 15, по первому возможному варианту, - жесткое, например сварное (см. фиг.1, 2). При этом ролики 21, 22 желательно выполнять с антифрикционной, по отношению к материалу фронтальной поверхности ступени 2, поверхностью для минимизации сопротивления трения смещениям пятна контакта «ролик - фронтальная поверхность ступени» в поперечном направлении на величину в несколько миллиметров (см. далее по тексту о зазорах в тормозных парах и о функционировании устройства в целом).
Вторым возможным вариантом (не показан) является крепление рычагов 19, 20 к полувалам 14, 15 со свободой одностороннего качания рычага при поперечном уводе (смещении) его основания и неподвижном в поперечном направлении пятне контакта «ролик - фронтальная поверхность ступени». Конструктивно это может быть обеспечено секторным шарниром с осью, параллельной продольной оси шасси 1.
Третьим возможным вариантом (конструктивно простейшим и, как правило, исключающим смещение пятна контакта «ролик - фронтальная поверхность ступени») является выполнение рычагов 19, 20 достаточно узкими, то есть пластинчатыми, с возможностью изгиба при поперечных уводах (смещениях) основания рычага и неподвижном в поперечном направлении пятне контакта «ролик - фронтальная поверхность ступени».
Таким образом, обеспечена возможность независимого друг от друга поворота рычагов 19, 20 в продольных вертикальных плоскостях, под действием сил реакции их взаимодействия с фронтальной поверхностью (стенкой) ступени 1, и бортового торможения шасси 1 при заданном их рабочем угловом положении.
Тормозные пары (для торможения полувалов 14, 15) выполнены (см. фиг.1, 2) в виде пар трения, преимущественно дисковых пар, с подвижной 23, 24 (для левой и правой тормозных пар) и неподвижной (относительно бортов 3, 4 шасси) 25, 26 фрикционными поверхностями (дисками) с зазорами δл, δп соответственно (величиной в несколько миллиметров, рассчитывается как функция ряда геометрических параметров шасси и заданного минимально необходимого углового отклонения γ фактического курса X′ шасси 1 от заданного курса X) при крайних нижних положениях рычагов 19, 20, определяемых упорами 27 и 28 по левому и правому бортам 3, 4 соответственно (см. фиг.3), что соответствует упомянутым выше начальным углам установки рычагов 19, 20 - αл0, αп0.
Неподвижность дисков 25, 26 обеспечена их жестким креплением на опорных элементах. В описанном (см. фиг.1, 2) случае в качестве опорных элементов выступают непосредственно борта 3 и 4. В описанном ниже по тексту «моноблочном» стабилизаторе - переходные детали.
Гарантированные зазоры в тормозных парах, как функция рабочих угловых ходов αл, αп рычагов 19, 20, обеспечены наличием распорных (возвратных), в данном примере - цилиндрических, пружин 29, 30.
Геометрические размеры устройства, рабочие хода и жесткости пружин 29, 30 подбирают и/или рассчитывают, задав разумно-достаточное минимально допустимое значение (отклонение) угла γ, например 1 градус.
Левый и правый торцы полувалов 14, 15 связаны с возвратными пружинами 31, 32 их поворота на оси 9 (см. фиг.1-3), с возможностью гарантированного поджатия рычагов 19, 20 либо к упорам 27, 28, либо к поверхности ступени 2 (см. фиг.4, 5).
Для повышения жесткости системы в поперечном направлении и замыкания «распорных» усилий в пределах самого стабилизатора - на оси 9, рекомендуется концы последней соединять с бортами 3, 4 именно с такой возможностью. Например (см. фиг.1), посредством резьбовых концов 33, 34 оси 9, гаек 35, 36 с шайбами 37, 38 и фланцев 39, 40, закрепленных на бортах 3, 4 шпильками 41, 42.
Фиг.2 не «загромождена» узлами 33-42, тем более что, в принципе, возможно замкнуть распорные усилия и путем простых стягивающих борта 3, 4 шпилек, установленных параллельно оси 9 на небольшом расстоянии от нее (не показаны). Следует принять во внимание и то, что в обеспечение поперечной жесткости рамы и особенно несущего корпуса шасси 1 такие стягивающие шпильки могут быть полезны и безотносительно стабилизатора.
Однако приоритетной (оптимальной) является конструктивная реализация стабилизатора, которую можно условно назвать «моноблочной» (см. фиг.6). У «моноблочного» стабилизатора неподвижные диски 25 и 26 тормозных пар закреплены не непосредственно на бортах 3 и 4 несущей конструкции, а на внутренних торцах (щеках) фланцев 39 и 40 соответственно (см. также фиг.1). Таким образом ось 9, разрезной вал 14, 15, тормозные пары 23, 25 и 24, 26, фланцы 39, 40 (которые в данном случае являются упомянутыми опорными элементами несущей конструкции с бортами 3, 4) и гайки 33, 34 с шайбами 37, 38 образуют замкнутую в силовом отношении систему, с возможностью замыкания довольно значительных «распорных» сил Fл и Fп на ось 9 по самому короткому пути - в пределах перечисленных составных частей стабилизатора. Такой стабилизатор можно, как «моноблочное» устройство, быстро монтировать и демонтировать на разных экземплярах шасси и в разных местах одного и того же экземпляра шасси.
В части общей компоновки устройства возможны варианты расположения рычагов 19, 20: в передней, задней или средней части шасси. А в пределах каждого из перечисленных вариантов - подварианты: либо за осями крайних (как правило, передних по ходу движения на ступень) ведомых или ведущих колес (для первых двух вариантов), либо вблизи центра масс транспортного средства при преодолении ступени или лестницы (для третьего варианта, предполагающего центральное расположение).
В примере, показанном на фиг.2, с гусеничным движителем, разрезной вал 14-15 (а значит, и почти весь стабилизатор) расположен между левым и правым передними, по ходу движения транспортного средства задним ходом на ступень (вверх по лестнице), зубчатыми колесами 7, 8 движителя («ленивцами»). В частном случае, упомянутый разрезной вал 14-15 может быть соосен с передними, по ходу движения на ступень, ведомыми зубчатыми колесами гусеничного движителя - «ленивцами» 7, 8 (см. фиг.2). Как альтернативный вариант, движитель может быть выполнен колесным, а упомянутый разрезной вал в этом случае соосен с передними, при всходе на ступень, колесами движителя (не показано).
Вариант с расположением стабилизатора вблизи центра масс следует считать оптимальным с точки зрения эффективности работы стабилизатора (см. далее в описании работы стабилизатора).
Стабилизатор может быть выполнен также с возможностью оперативного перевода из рабочего в нерабочее положение, аналогично уводу тормозов в прототипе (ножным рычагом и дополнительных пружин - не показано), во избежание ухудшения профильной проходимости в режимах спуска со ступени 2 и при движении на горизонтальной неровной поверхности в сторону «против шерсти» в отношении рычагов 19, 20.
Не исключен вариант быстросъемных тормозных рычагов 19, 20, что удобнее сочетать с предложенным выше вторым вариантом соединения тормозных рычагов с 19, 20 с полувалами 14, 15.
Описанный пример конкретного варианта конструкции не исключает других возможных вариантов устройства в рамках заявляемой совокупности существенных конструктивных признаков.
Заявляемое устройство работает следующим образом.
При подъеме шасси на лестницу (или одиночную ступень, бордюрный камень, эскарп) 2 за счет гусеничного движителя с опорой на левую 5 и правую 6 гусеницы, взаимодействие последних в идеале идентично и углового отклонения шасси 1 от нормали X к кромке ступени нет: γ=0. Моменты реакций на рычагах 19 и 20 одинаково поворачивают их на углы αл=αп («текущие» углы). Соответственно, на такие же одинаковые углы синхронно поворачиваются и полувалы 14, 15. Будучи отжатыми от бортов 3, 4, пружинами 29, 30, полувалы 16, 17 прижаты скошенными торцами в подшипнике 16-18 друг к другу. Разрезной вал 14-15 вращается как цельный.
В противном случае гусеницы 5 и 6 либо вступают во взаимодействие со ступенью не одновременно, либо взаимодействуют неодинаково. Как по причине различных (в реальных условиях) условий взаимодействия (локальные дефекты ступени, локальное отличие коэффициентов трения и сцепления, несимметричность развесовки и т.д.), так и в результате исходного углового отклонения Y фактического курса X′ шасси 1 от заданного курса X. Как правило, имеет место и то, и другое одновременно.
При γ>0, например при забегании левой гусеницы (см. фиг.3), левый рычаг 19 (его ролик 21 при наличии такового) упирается во фронтальную поверхность ступени 2 и начинает отходить от упора 27, сжимая пружину 31, в то время как правый рычаг 20 еще не дошел до нее и остается поджатым пружиной 32 к упору 28. Появляется и начинает нарастать, по ходу дальнейшего движения шасси 1, разность углов поворота (αл-αп)>0. Эта разность углов, отражающая отклонение γ>0 курса X′ шасси 1 от заданного курса X, может сохраниться и после вступления правого рычага 20 во взаимодействие с фронтальной поверхностью ступени 2, поскольку определяющим является именно величина (αл-αп)>0.
Однако дифференцированный поворот полувалов 14, 15, а значит, и наличие относительного поворота каждого из них, благодаря скосу 16-18, приводит к возникновению пары оппозитных «распорных» сил Fл и Fп (см. фиг.1, 2) и, под их действием, к автоматическому распиранию полувалов 14 и 15. Зазоры δл, δп синхронно уменьшаются до нуля, и тормозные пары 23, 25 слева и 24, 26 справа вступают во фрикционное взаимодействие. В результате имеет место эффект торможения («заклинки») рычага забегающего «борта» (здесь - рычага 19). Шасси 1 «становится на левый якорь» (скорость перемещения оси колеса 7 и борта 3 обнуляется: Vл=0, что проиллюстрировано фиг.4, 5), а правая часть движителя с гусеницей 6 продолжает «загребать»: Vп>0 (см. там же). Возникший поперечный момент силы, направленный против часовой стрелки, приводит к сокращению величины разности (αл-αп)>0 вплоть до нуля. При этом, при не отключенном приводе левой части движителя, гусеница 5 пробуксовывает, «дожидаясь», когда ее «нагонит» правая гусеница 6.
В оптимальном (и соответственно рекомендуемом как приоритетном) варианте расположения стабилизатора вблизи отвесной линии, проходящей через центр масс транспортного средства, где в пятнах контакта «движитель-ступень» (левом и правом), как известно, сцепной вес максимален (при одинаковом коэффициенте сцепления), будет иметь место, соответственно, максимальный разворачивающий по азимуту в сторону курса X момент силы - стабилизирующий момент (см. фиг.5).
Неизбежно распирая борта 3, 4, «распорные» оппозитные силы Fл и Fп (см. фиг.1) передаются далее через фланцы 39, 40, шайбы 37, 38 и гайки 35, 36 на резьбовые концы 33, 34 оси 9, замыкаются на последней, разгружая борта 3, 4.
Замыкание «распорных» сил на ось 9 в «моноблочном» стабилизаторе (см. фиг.6) происходит более коротким путем, о чем было сказано выше в описании этого оптимального варианта.
При возврате угловой разности (αл-αп) в начальное заданное нулевое или какое-либо разумно-достаточное минимально допустимое значение (отклонение), например упомянутый выше 1 градус, тормозные пары 23, 25 и 24, 26 синхронно размыкаются, левый «борт» шасси 1 «разъякоряется»: рычаг 19 продолжает, под действием момента силы реакции ступени 2, превышающего возвратный момент пружины 31, поворачиваться вверх (на фиг.3 - против часовой стрелки), но уже синхронно с правым рычагом 20.
При рекомендуемой нелинейности формы рычагов 19, 20 (с выпуклостью назад по ходу движения на ступень) при снабжении их роликами 21, 22 сохраняется постоянство контакта роликов со ступенью 2 (точнее, с фронтальной ее поверхностью - стенкой или кромкой) при наличии зазора между ступенью 2 и собственно телом каждого рычага на всей его длине. Поскольку профиль ступени 2 (см. фиг.3) имеет поднутрение (наклон, скос вовнутрь) именно там, где и происходит взаимодействие роликов 21, 22 с ней.
Взаимное расположение осей колес 7, 8 и оси 9 (их несоосность или соосность) относится к компоновочным решениям, дающим эффект, прежде всего, по минимизации массогабаритных характеристик, но не к функциональным особенностям.
В описанном процессе функционирования устройства, собственно, и заключается явление автоматической стабилизации курса движения шасси 1.
Техническим результатом использования изобретения является повышение технико-эксплуатационных характеристик шасси и транспортных средств в целом в части курсовой устойчивости подъема по лестничным маршам и преодолении единичных ступенчатых профильных препятствий (бордюрного камня и др.), обеспечение подвижности и эксплуатационной безопасности, особенно в отношении инвалидных колясок и др. реабилитационного транспорта для лиц с ограниченными физическими возможностями, путем обеспечения автоматической стабилизации курса движения при подъеме на ступень(ни).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНЫЙ МИННЫЙ РАЗГРАДИТЕЛЬ | 2012 |
|
RU2511269C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО, ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2011 |
|
RU2459605C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ И НА ЭСКАЛАТОРАХ | 2012 |
|
RU2510347C2 |
| САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 1996 |
|
RU2115401C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
Изобретение относится к инвалидным коляскам и роботам, способным перемещаться по лестницам. Стабилизатор курса движения шасси по ступеням содержит разнесенные попарно по ширине шасси подпружиненные левые и правые тормозные рычаги (TP) с левыми и правыми подпружиненными тормозными парами. Предусмотрена возможность независимого друг от друга поворота ТР в продольных вертикальных плоскостях на шарнирах с общей поперечной осью под действием сил реакции их взаимодействия со ступенью. Предусмотрена возможность независимого бортового торможения шасси при заданном угловом положении TP за счет автоматического включения тормозных пар. В состав шасси входят несущая конструкция, движитель и энергосиловая установка. Поперечная ось установлена враспор между бортами несущей конструкции. Коаксиально ей на подшипниках установлен разрезной наискось вал, образующий бортовые полувалы с упорным подшипником на их стыке в указанном косом разрезе. Полувалы и TP подпружинены парой распорных возвратных пружин в осевом направлении и парой распорных возвратных пружин в повороте TP вокруг оси. Каждая тормозная пара встроена между соответствующими полувалом и бортом несущей конструкции шасси. TP прикреплены своими основаниями к полувалам и поджаты, через них, второй парой пружин к упорам-ограничителям поворота. Достигается повышение курсовой устойчивости подъема по лестничным маршам и преодоления единичных профильных препятствий типа ступени. 7 з.п. ф-лы, 6 ил.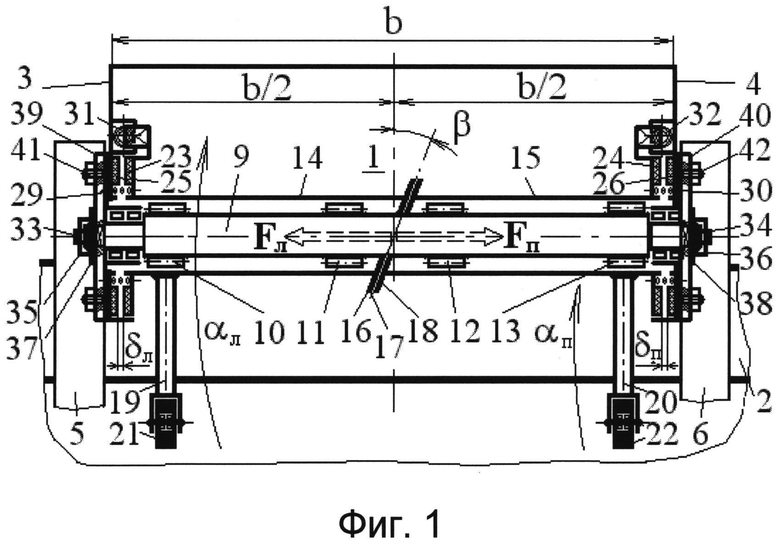
1. Стабилизатор курса движения шасси транспортного средства по ступеням, содержащий разнесенные попарно по ширине шасси подпружиненные левые и правые тормозные рычаги с левыми и правыми подпружиненными тормозными парами, установленные с возможностью независимого друг от друга поворота тормозных рычагов в продольных вертикальных плоскостях на шарнирах с общей поперечной осью под действием сил реакции их взаимодействия со ступенью и с возможностью независимого бортового торможения шасси при заданном угловом положении тормозных рычагов за счет автоматического включения тормозных пар, при этом в состав шасси входят несущая конструкция с бортами, движитель и энергосиловая установка, отличающийся тем, что поперечная ось установлена враспор между бортами несущей конструкции, коаксиально ей на подшипниках установлен разрезной наискось вал, образующий бортовые, подпружиненные парой распорных возвратных пружин в осевом направлении и парой распорных возвратных пружин в повороте тормозных рычагов вокруг оси, полувалы с упорным подшипником на их стыке в указанном косом разрезе, каждая тормозная пара встроена между соответствующими полувалом и опорным элементом несущей конструкции шасси, а тормозные рычаги прикреплены своими основаниями к полувалам и поджаты, через полувалы, второй из упомянутых пар пружин к упорам-ограничителям поворота с возможностью синхронного поворота левых и правых тормозных рычагов с полувалами в одинаковых условиях взаимодействия со ступенью и с возможностью осевой раздвижки полувалов в неодинаковых условиях взаимодействия со ступенью и, вследствие этого, автоматического синхронного включения тормозных пар обоих бортов при заданном минимально допустимом курсовом отклонении шасси от продольной нормали к кромке ступени.
2. Стабилизатор по п.1, отличающийся тем, что полувалы выполнены одинаковыми.
3. Стабилизатор по п.1, отличающийся тем, что тормозные пары выполнены дисковыми.
4. Стабилизатор по п.1, отличающийся тем, что тормозные рычаги выполнены изогнутыми и установлены с ориентацией вогнутости по ходу движения шасси на ступень.
5. Стабилизатор по п.1, отличающийся тем, что тормозные рычаги выполнены с возможностью сохранения положения пятен своего контакта со ступенью в поперечном направлении при боковом уводе оснований рычагов относительно ступени.
6. Стабилизатор по п.5, отличающийся тем, что тормозные рычаги выполнены пластинчатыми, с возможностью изгиба при поперечном смещении его основания.
7. Стабилизатор по п.1, отличающийся тем, что в нем дополнительно предусмотрены фланцы с возможностью их жесткого разъемного соединения с несущей конструкцией шасси, жестко и разъемно соединенные с концами упомянутой оси, при этом неподвижные части тормозных пар закреплены на обращенных к полувалам торцах фланцев, которые при установке на шасси выступают в качестве опорных элементов его несущей конструкции.
8. Стабилизатор по п.1, отличающийся тем, что установлен вблизи центра масс транспортного средства.
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО, ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2011 |
|
RU2459605C1 |
| ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ДВИЖЕНИЯ, В ЧАСТНОСТИ, ПО ЛЕСТНИЦАМ | 2005 |
|
RU2312788C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| US 6328120 B1, 11.12.2001 | |||
| СПОСОБ РЕГЕНЕРАЦИИ САЖЕВОГО ФИЛЬТРА | 2013 |
|
RU2641325C2 |

