Изобретение относится к технике автоматического управления полетом летательных аппаратов и может использоваться для улучшения помехозащищенности, точности и повышения надежности системы за счет введения в каждом канале резервированного привода системы контроля (типа канал - модель) на разнородных алгоритмических принципах.
Известен электрогидравлический следящий привод (ЭГСП) с непосредственным управлением [1], содержащий исполнительный гидродвигатель, на штоке которого установлен датчик обратной связи (ДОС), и последовательно соединенные задатчик положения гидродвигателя, первый предварительный усилитель-сумматор и следящий привод рулевой машинки (РМ), содержащий последовательно соединительные, второй предварительный усилитель-сумматор и усилитель мощности (УМ), подключенный к обмотке управления линейного электродвигателя (ЛЭД), якорь которого соединен с золотником непосредственного управления гидродвигателем, а также ДОС РМ, связанный со штоком золотника гидродвигателя, выход которого подключен ко второму входу второго предварительного усилителя-сумматора, выход ДОС гидродвигателя подключен ко второму входу первого предварительного усилителя-сумматора, обратная связь по току обмотки управления ЛЭД подключена ко второму входу УМ.
К недостаткам известного привода следует отнести наличие нелинейных статических характеристик его отдельных узлов. Гидродинамические силы и силы трения, действующие на золотник гидродвигателя, вносят нелинейный характер изменений в статические характеристики привода. «Сухое трение» вносит «зону нечувствительности» в нелинейную статическую характеристику ЛЭД, а действие гидродинамических сил искажает линейный характер этой характеристики. С увеличением расхода жидкости через золотник гидродвигателя величина этих сил возрастает, а потому возрастает и нелинейный негативный эффект от их влияния.
К другим недостаткам известного привода следует отнести отсутствие астатизма в следящем приводе РМ. Последнее обстоятельство при наличии существенно нелинейной статической характеристики ЛЭД с зоной нечувствительности делает невозможным получение стабильных динамических и статистических характеристик привода в области малых входных управляющих сигналов.
Известен ЭГСП с непосредственным управлением [2], содержащий сдвоенный золотник гидродвигателя, непосредственно управляющий сдвоенным исполнительным гидродвигателем, на штоке которого установлен ДОС (привод многоканальный и содержит две гидросистемы, но раскрыт только один из каналов управления) и последовательно соединенные задатчик положения гидродвигателя, первый предварительный усилитель-сумматор и следящий привод РМ, содержащий последовательно соединенные второй предварительный усилитель-сумматор и УМ, подключенный к обмотке управления ЛЭД непосредственного управления золотником, выход первого предварительного усилителя-сумматора соединен с входом второго предварительного усилителя-сумматора, ДОС гидродвигателя подключен ко второму входу первого предварительного усилителя, обратная связь по положению РМ подключена ко второму входу второго предварительного усилителя, обратная связь по току обмотки управления ЛЭД непосредственного управления золотником подключена ко второму входу УМ, модуль электрогидравлического усилителя, включающий в себя двухсистемную РМ со сдвоенным золотником РМ и датчиком постоянного тока (ДПТ) положения штока РМ, а также корректирующее устройство с моделью, включающее в себя последовательно соединенные первый усилитель с регулируемым ограничением, интегратор, блок сравнения, второй усилитель с регулируемым ограничением, дифференцирующее звено в ограниченной полосе частот, третий усилитель с регулируемым ограничением, выход которого включен на третий вход второго предварительного усилителя-сумматора, входы первого усилителя с регулируемым ограничением соединены с выходами первого предварительного усилителя-сумматора, интегратора и второго усилителя с регулируемым ограничением, второй вход блока сравнения соединен с ДПТ положения РМ, шток сдвоенного золотника РМ соединен с якорем ЛЭД непосредственного управления золотником, а шток двухсистемной РМ соединен со штоком сдвоенного золотника гидродвигателя.
К недостаткам известного привода следует отнести чувствительность к действию нелинейных и параметрических возмущающих факторов.
Значительные статистические ошибки, вызванные наличием зоны нечувствительности в контуре управления, уменьшая тем самым чувствительность привода в области малых сигналов задания.
К другим недостаткам известного привода следует отнести невозможность быстрой адаптации систем управления при изменении свойств объектов управления.
К другим недостаткам известного привода следует отнести невысокую надежность.
Наиболее близким техническим решением является система адаптивного управления ЭГСП [3] (прототип), содержащая первый канал адаптивного управления (КАУ), включающий в себя сдвоенный золотник, управляющий сдвоенным исполнительным гидродвигателем, на штоке которого установлен датчик обратной связи, задатчик положения гидродвигателя, усилитель мощности, выход которого является первым выходом КАУ и подключен к обмотке управления линейного электродвигателя, соединенного с модулем электрогидравлического усилителя, включающим в себя сдвоенный золотник рулевой машинки, соединенный с якорем линейного электродвигателя, и двухсистемную рулевую машинку, соединенную со сдвоенным золотником, на штоке которой установлен датчик постоянного тока положения рулевой машинки, а также корректирующее устройство с моделью, причем сдвоенный золотник соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами сдвоенного исполнительного гидродвигателя, сдвоенный золотник рулевой машинки соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами двухсистемной рулевой машинкой, процессор и PID-контроллер, представляющие собой корректирующее устройство с моделью, генератор, МКО-контроллер, микроконвертер, термохолодильник, контроллер холодильника, элемент ИЛИ, первый усилитель, второй усилитель, третий усилитель, четвертый усилитель, пятый усилитель, выход которого соединен в первым входом микроконвертера, первый выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом процессора, первый вход которого соединен с выходом МКО-контроллера, первый вход-выход которого соединен со входом-выходом задатчика, причем группа выходов микроконвертера соединена с первой группой входов PID-контроллера, группа выходов которого соединена с первой группой входов микроконвертера, второй выход которого соединен с первым входом контроллера холодильника, группа выходов которого соединена с второй группой входов микроконвертера, второй вход которого соединен с выходом второго усилителя, вход которого соединен с выходом датчика обратной связи гидродвигателя и является первым входом КАУ, причем группа входов-выходов МКО-контроллера является группой входов-выходов КАУ и соединена с группами входов-выходов PID-контроллера и процессора, первая группа выходов которого является первой группой выходов КАУ и соединена со второй группой входов PID-контроллера и с первой группой входов МКО-контроллера, вторая группа входов которого является второй группой выходов КАУ и соединена со второй группой выходов процессора и с третьей группой входов PID-контроллера, выход которого соединен со вторым входом процессора, третий вход которого является вторым входом КАУ, причем выход линейного электродвигателя является третьим входом КАУ и соединен со входом первого усилителя выход которого соединен с третьим входом микроконвертера, четвертый вход которого соединен с выходом третьего усилителя, вход которого соединен с выходом датчика постоянного тока рулевой машинки и является четвертым входом КАУ, выход контроллера холодильника соединен со входом термохолодильника, выход которого соединен со вторым входом контроллера холодильника, выход элемента ИЛИ соединен со входом усилителя мощности, второй и третий выходы которого соединены соответственно со входами пятого усилителя и четвертого усилителя, выход которого соединен с пятым входом микроконвертера, выход генератора соединен со входом PID-контроллера и является вторым выходом КАУ, вторую, третью и четвертую обмотки ЛЭД, второй, третий, четвертый датчики ДОС гидродвигателя, второй, третий, четвертый датчики ДПТ РМ, второй, третий и четвертый каналы КАУ, первый, второй, третий, четвертый контроллеры межмашинного обмена (КМО), первый, второй, третий, четвертый передатчики, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый приемники, группы выходов которых соединены с первой, второй, третьей группами входов первого, второго, третьего, четвертого КМО соответственно, первые, вторые, третьи выходы которых соединены с первыми входами приемников соответственно, причем второй вход первого приемника соединен с выходом второго передатчика, со вторыми входами восьмого и одиннадцатого приемников, выход первого передатчика соединен со вторыми входами четвертого, седьмого, десятого приемников, выход третьего передатчика соединен со вторыми входами второго, пятого, двенадцатого приемников, выход четвертого передатчика соединен со вторыми входами третьего, шестого, девятого приемников, группы входов первого, второго, третьего, четвертого передатчиков соединены с группами выходов первого, второго, третьего, четвертого КМО соответственно, четвертые выходы которых соединены с первыми входами первого, второго, третьего, четвертого КАУ соответственно, вторые выходы которых соединены с первыми входами первого, второго, третьего, четвертого КМО, адресные шины, шины данных и управляющие шины которых соединены с адресными шинами, шинами данных и управляющими шинами первого, второго, третьего, четвертого КАУ, вторые входы второго, третьего и четвертого КАУ соединены с выходами второй, третьей и четвертой обмотками ЛЭД соответственно, входы которых соединены с первыми выходами второго, третьего, четвертого КАУ, третьи и четвертые входы которых соединены с выходами вторых, третьих, четвертых датчиков ДОС ГД и ДПТ РМ соответственно.
Задачами изобретения являются улучшение помехозащищенности и точности и повышение надежности системы за счет введения в каждом канале резервированного привода системы контроля (типа канал - модель) на разнородных алгоритмических принципах.
Сущность заявляемого изобретения, возможность его осуществления и промышленного использования поясняются чертежами, представленными на фигурах 1-11, где:
на фиг. 1 представлена функциональная схема канала адаптивного управления ЭГСП с контролем;
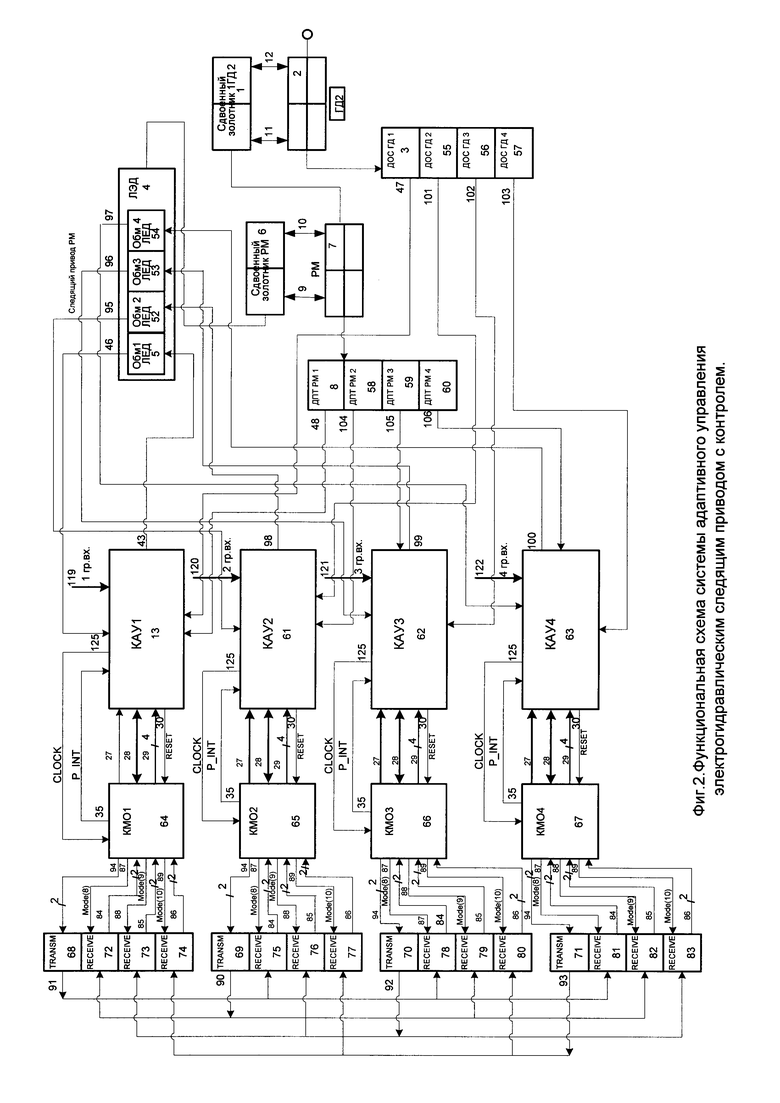
на фиг. 2 представлена функциональная схема системы адаптивного управления ЭГСП с контролем;
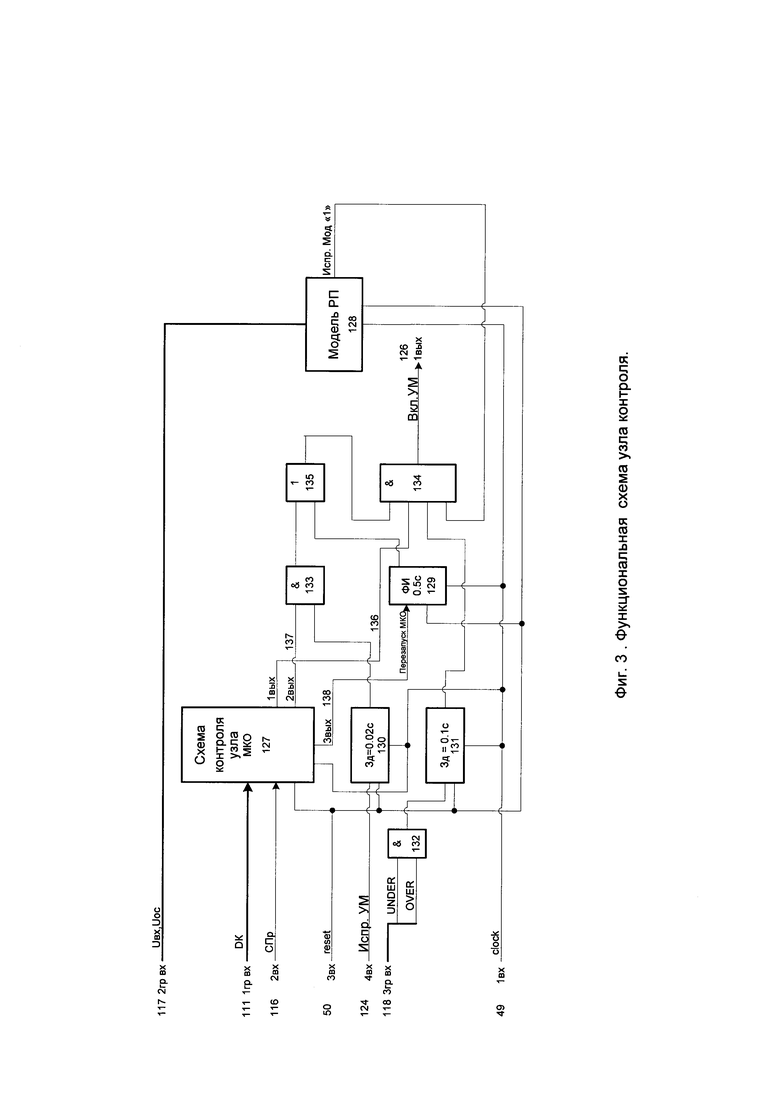
на фиг. 3 представлена функциональная схема узла контроля 110;
на фиг. 4 представлена структурная схема узла МКО 107;
на фиг. 5 представлена функциональная схема контроля узла МКО 127;
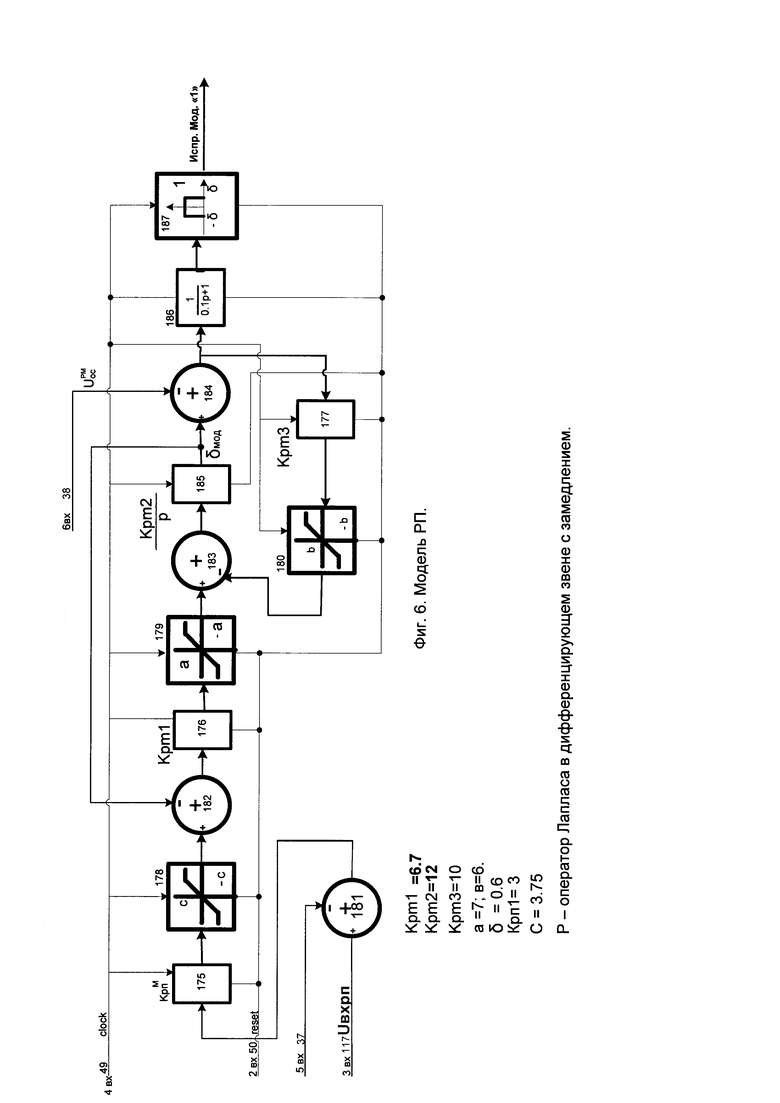
на фиг. 6 представлена модель рулевого привода (РП) 128; на фиг. 7 представлена структура области двухпортового ОЗУ PID-контроллера 25;
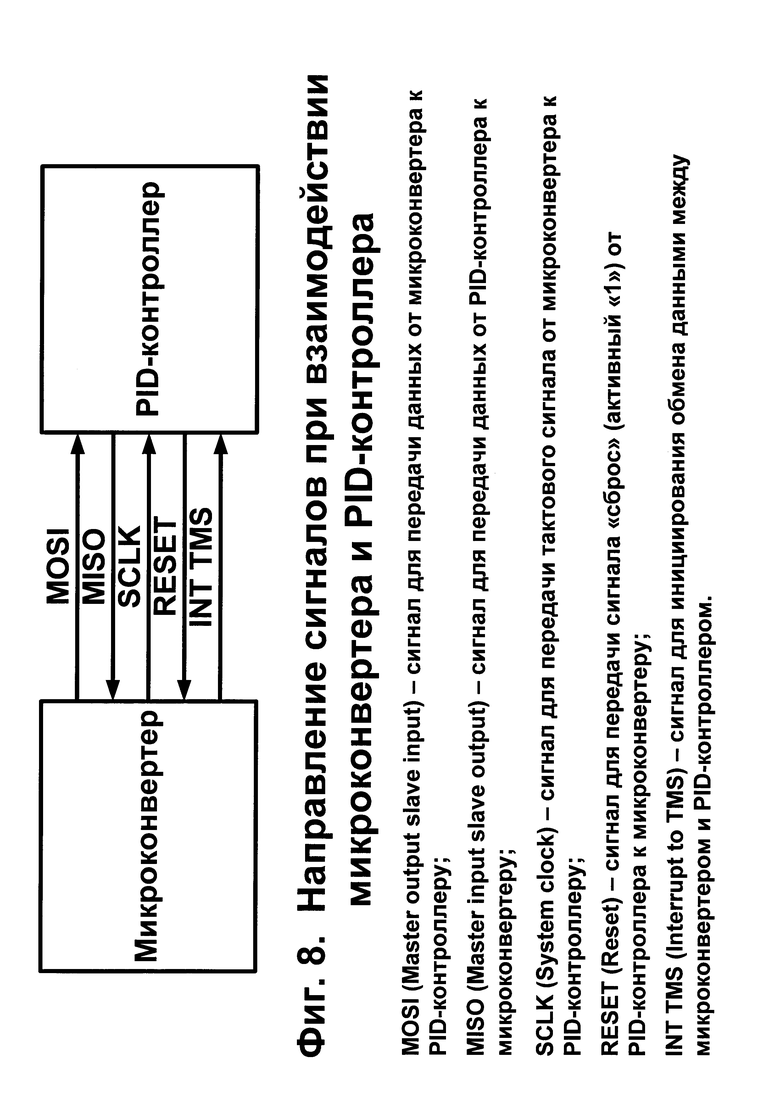
на фиг. 8 представлено направление сигналов при взаимодействии микроконвертера 17 и PID-контроллера 25;
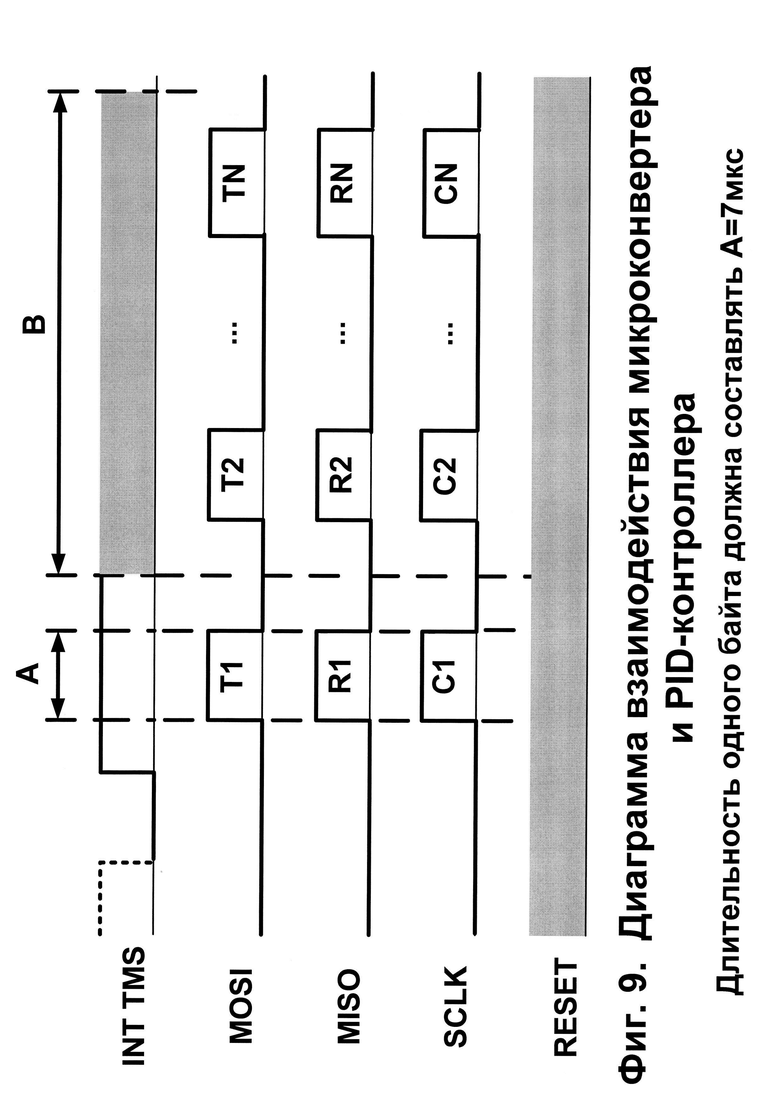
на фиг. 9 представлена диаграмма взаимодействия микроконвертера 17 и PID-контроллера 25;
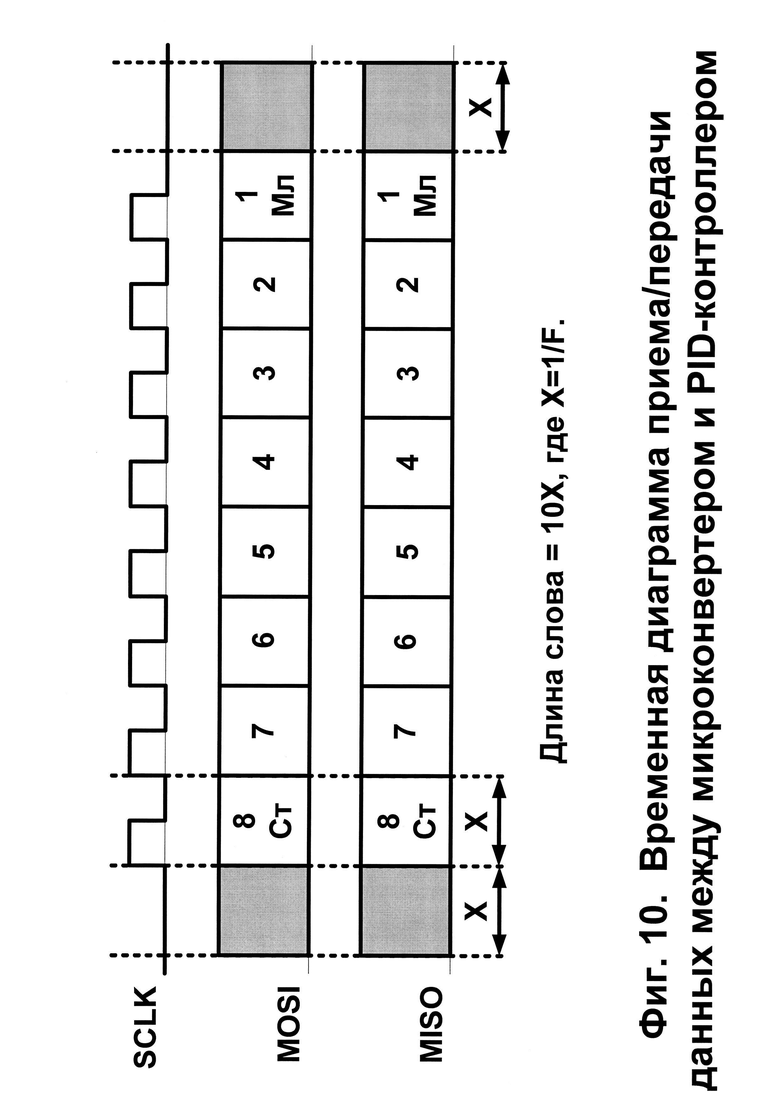
на фиг. 10 представлена временная диаграмма приема/передачи данных между микроконвертером 17 и PID-контроллером 25;
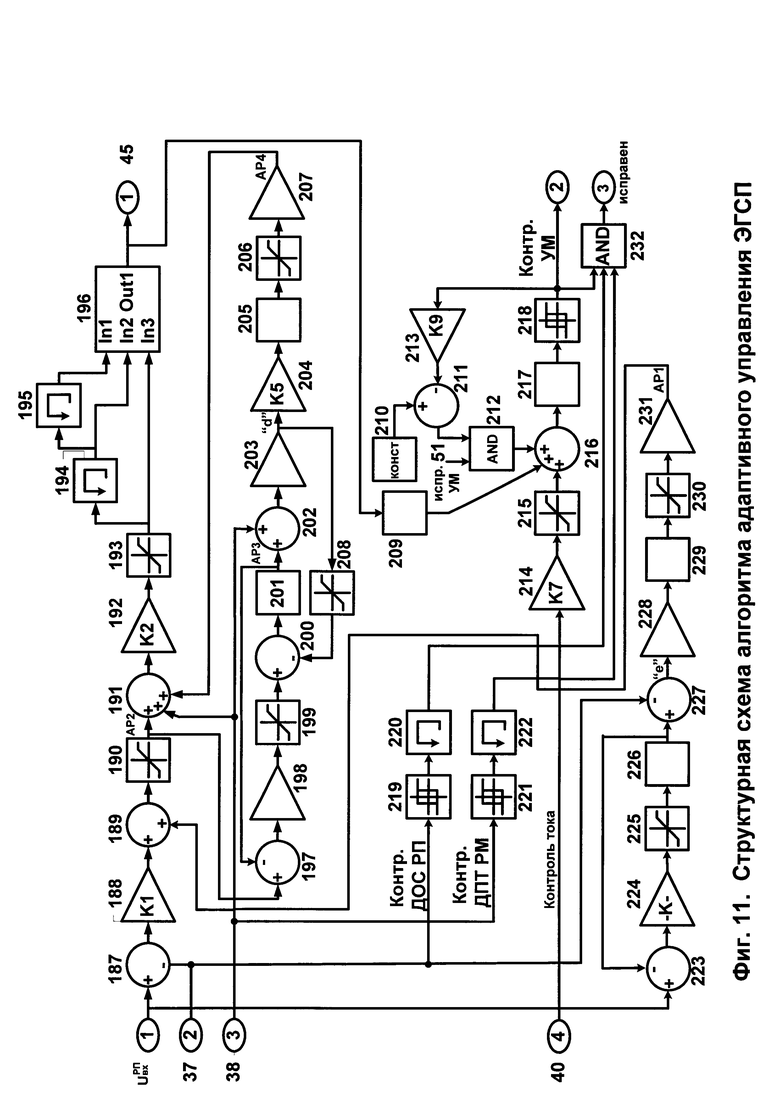
на фиг. 11 представлена структурная схема алгоритма адаптивного управления ЭГСП.
Указанные преимущества заявляемой системы адаптивного управления ЭГСП с контролем перед прототипом достигается за счет того, что в систему адаптивного управления ЭГСП с контролем, содержащую сдвоенный золотник 1, управляющий сдвоенным исполнительным гидродвигателем 2, на штоке которого установлен датчик обратной связи 3, линейный электродвигатель 4 с обмоткой управления 5, соединенный с модулем электрогидравлического усилителя, включающим в себя сдвоенный золотник рулевой машинки 6, соединенный с якорем линейного электродвигателя, и двухсистемную рулевую машинку 7, на штоке которой установлен датчик постоянного тока (ДПТ) 8 положения рулевой машинки, которая соединена двумя 9, 10 двунаправленными входами-выходами с двумя двунаправленными входами-выходами двухсистемной рулевой машинкой 7, причем сдвоенный золотник гидродвигателя 1 соединен двумя 11, 12 двунаправленными входами-выходами с двумя двунаправленными входами-выходами сдвоенного исполнительного гидродвигателя 2, первый 13 канал адаптивного управления (КАУ), содержащий задатчик 14, МКО-контроллер 15, первый генератор 16, микроконвертер 17, усилитель мощности 18, первый 19, второй 20, третий 21, четвертый 22, пятый 23 усилители, элемент ИЛИ 24, PID-контроллер 25 и процессор 26, соединенный первой адресной шиной 27, первой двунаправленной шиной данных 28 и первой управляющей шиной 29 с МКО контроллером 15 и с соответствующими шинами системы адаптивного управления ЭГСП с контролем, причем первый 30 выход КАУ (13, 61, 62, 63) соединен с первым выходом процессора 26 и входом МКО контроллера 15, мультиплексная шина 31 которого соединена с задатчиком 14, первая 32 группа выходов PID-контроллера 25 соединена с первой группой входов микроконвертера 17, первая 33 группа выходов которого соединена с первой группой входов PID-контроллера 25, причем первый 34 и второй 35 входы процессора 26 соединены с выходом МКО-контроллера 15 и первым входом КАУ (13, 61, 62, 63) соответственно, причем первый, второй, третий, четвертый, пятый входы микроконвертера 17 соединены с выходами (36, 37, 38, 39, 40) первого 19, второго 20, третьего 21, четвертого 22, пятого 23 усилителя соответственно, входы четвертого 22 и пятого 23 усилителей соединены с первым 41 и вторым 42 выходами УМ 18, третий выход которого является вторым 43 выходом КАУ (13, 61, 62, 63) и соединен с обмоткой ЛЭД 5, первый и второй входы элемента ИЛИ 24 соединены с выходом 44 процессора 26 и первым 45 выходом микроконвертера 17, причем вход первого 19 усилителя является вторым входом 46 КАУ (13, 61, 62, 63) и соединен с выходом ЛЭД 4, вход второго 20 усилителя является третьим входом 47 КАУ (13, 61, 62, 63) и соединен с ДОС 3 положения гидродвигателя, вход третьего 21 усилителя является четвертым входом 48 КАУ (13, 61, 62, 63) и соединен с датчиком ДПТ РМ 8, причем генератор 16 соединен со вторым 49 входом PID-контроллера 25, первый вход которого соединен со вторым 50 выходом микроконвертера 17, а выход 51 элемента ИЛИ соединен со входом усилителя мощности 18, а также система адаптивного управления ЭГСП с контролем содержит вторую 52, третью 53 и четвертую 54 обмотки ЛЭД, второй 55, третий 56, четвертый 57 датчики ДОС гидродвигателя, второй 58, третий 59, четвертый 60 датчики ДПТ РМ, второй 61, третий 62 и четвертый 63 каналы КАУ, первый 64, второй 65, третий 66, четвертый 67 контроллеры межмашинного обмена (КМО), первый 68, второй 69, третий 70, четвертый 71 передатчики, первый 72, второй 73, третий 74, четвертый 75, пятый 76, шестой 77, седьмой 78, восьмой 79, девятый 80, десятый 81, одиннадцатый 82, двенадцатый 83 приемники, группы выходов (84, 85, 86) которых соединены с первой, второй, третьей группами входов первого 64, второго 65, третьего 66, четвертого 67 КМО соответственно, первые 87, вторые 88, третьи 89 выходы которых соединены с первыми входами приемников (72, 73, 74) (75, 76, 77) (78, 79, 80) (81, 82, 83) соответственно, причем второй вход первого 72 приемника соединен с выходом 90 второго передатчика 69, со вторыми входами восьмого 79 и одиннадцатого 82 приемников, выход 91 первого передатчика 68 соединен со вторыми входами четвертого 75, седьмого 78, десятого 81 приемников, выход третьего 92 передатчика 70 соединен со вторыми входами второго 73, пятого 76, двенадцатого 83 приемников, выход 93 четвертого передатчика 71 соединен со вторыми входами третьего 74, шестого 77, девятого 80 приемников, группы входов 94 первого 68, второго 69, третьего 70, четвертого 71 передатчиков соединены с группами выходов первого 64, второго 65, третьего 66, четвертого 67 КМО соответственно, четвертые 35 выходы которых соединены с первыми входами первого 13, второго 61, третьего 62, четвертого 63 КАУ соответственно, первая адресная шина 27, первая шина данных 28 и первая управляющая шина 29 которых соединены с адресной шиной, шиной данных и управляющей шиной первого 64, второго 65, третьего 66, четвертого 67 КМО, причем вторые входы второго 61, третьего 62 и четвертого 63 КАУ соединены с выходами (95, 96, 97) второй 52, третьей 53 и четвертой 54 обмотками ЛЭД соответственно, входы которых соединены со вторыми (98, 99, 100) выходами второго 61, третьего 62, четвертого 63 КАУ, третьи и четвертые входы которых соединены с выходами (101, 102, 103) и (104, 105, 106) вторых (55, 58), третьих (56. 59), четвертых (57, 60) датчиков ДОС ГД и ДПТ РМ соответственно, и в каждый канал КАУ (13, 61, 62, 63) системы дополнительно введены узел МКО 107, контроль питания 108, второй генератор 109, узел контроля 110, первая группа входов которого соединена с первой группой выходов 111 узла МКО 107, соединенного второй 112 адресной шиной, второй 113 двунаправленной шиной данных и второй 114 управляющей шиной с соответствующими шинами PID контроллера 25, первый 115 выход которого соединен с первым входом узла МКО 107, первый 116 выход которого соединен с первым входом узла контроля 110, третий 117 вход и вторая 118 группа входов которого соединены с третьим выходом микроконвертера 17 и группой выходов контроля питания 108 соответственно, группа входов которого соединена с первой группой входов 119 системы адаптивного управления ЭГСП с контролем, вторая 120, третья 121 и четвертая 122 группы входов которой соединены со вторым 61, третьим 62 и четвертым 63 КАУ соответственно, причем первая адресная шина 27, первая двунаправленная шина данных 28 и первая управляющая шина 29 узла МКО 107 соединены с соответствующими шинами процессора 26, третий вход которого соединен со вторым выходом 123 узла МКО 107, второй вход которого соединен с первым входом PID контроллера 25, со вторым 50 выходом микроконвертера 17 и вторым входом узла контроля 110, четвертый вход которого соединен с четвертым 124 выходом усилителя мощности 18, причем выход второго генератора 109 соединен с четвертым входом процессора 26 и третьим входом узла МКО 107 и является третьим 125 выходом КАУ (13, 61, 62, 63), который соединен с пятым входом первого 64, второго 65, третьего 66, четвертого 67 КМО, причем выход 126 и четвертый, пятый и шестой входы узла контроля 110 соединены с третьим входом элемента ИЛИ 24, выходом 49 первого генератора 16, выходом 37 второго 20 усилителя и выходом 38 третьего 21 усилителя соответственно.
Узел контроля 110 содержит схему контроля узла МКО 127, модель РП 128, формирователь импульса 129, первый элемент задержки 130, второй элемент задержки 131, первый элемент И 132, второй элемент И 133, третий элемент И 134, элемент ИЛИ 135, выход которого соединен с первым входом третьего элемента И 134, выход которого является первым 126 выходом узла контроля 110, первая 111 группа входов которого соединена с первой группой входов схемы контроля узла МКО 127, первый 136 выход которой соединен со вторым входом третьего 134 элемента И, третий вход которого соединен с выходом второго элемента 131 задержки, первый вход которой соединен с выходом первого 132 элемента И, входы которого являются третьей 118 группой входов узла контроля 110, вторая 117 группа входов соединена с группой входов модели РП 128, выход 187 которой соединен с четвертым входом третьего 134 элемента И, причем третий 49 вход узла контроля 110 соединен с первыми входами схемы контроля узла МКО 127, модели РП 128, первого 130 и второго 131 элементов задержек и формирователя импульсов 129, второй вход которого соединен со вторыми входами схемы контроля узла МКО 127, модели РП 128, первого 130 и второго 131 элементов задержек и является вторым 50 входом узла контроля 110, первый 116 вход которого соединен с третьим входом схемы контроля узла МКО 127, второй 137 выход которой соединен с первым входом второго 133 элемента И, выход которого соединен с первым входом элемента ИЛИ 135, второй вход которого соединен с выходом формирователя импульсов 129, третий вход которого соединен с третьим 138 выходом схемы контроля узла МКО 127, причем четвертый 124 вход узла контроля 110 соединен с третьим входом первого элемента 130 задержки, выход которого соединен со вторым входом второго 133 элемента И.
Узел МКО 107 содержит контроллер МКО 139 в режиме контроллера шины (КШ), контроллер МКО 140 в режиме оконечного устройства (ОУ), первый 141 приемопередатчик, второй 142 приемопередатчик, третий 143 приемопередатчик, четвертый 144 приемопередатчик, первый 145 трансформатор, второй 146 трансформатор, третий 147 трансформатор, четвертый 148 трансформатор, первый 149 трансформатор 1, второй 150 трансформатор 1, третий 151 трансформатор 1, четвертый 152 трансформатор 1, первую пару 153 резисторов, вторую пару 154 резисторов, третью пару 155 резисторов, четвертую пару 156 резисторов, первая группа входов-выходов которой соединена с первой группой входов-выходов четвертого 152 трансформатора 1 вторая группа входов-выходов которого соединена с первой группой входов-выходов четвертого 148 трансформатора, вторая группа входов-выходов которого соединена с группой входов-выходов четвертого 144 приемопередатчика, выход которого соединен с первым входом контроллера МКО в режиме ОУ 140, первый выход которого соединен со входом четвертого 144 приемопередатчика, причем первый выход контроллера МКО в режиме КШ 139 соединен со входом первого 141 приемопередатчика, группа входов-выходов которого соединена с первой группой входов-выходов первого 145 трансформатора, вторая группа входов-выходов которого соединена с первой группой входов-выходов первого 149 трансформатора 1, вторая группа входов-выходов которого соединена с первой группой входов-выходов первой пары 153 резисторов, вторая группа входов-выходов которой является магистральной шиной 157, которая соединена с первой группой входов-выходов третьей пары 155 резисторов, вторая группа входов-выходов которой соединена с первой группой входов-выходов третьего 151 трансформатора 1 вторая группа входов-выходов которого соединена с первой группой входов-выходов третьего 147 трансформатора, вторая группа входов-выходов которого соединена с группой входов-выходов третьего 143 приемопередатчика, выход которого соединен со вторым входом контроллера МКО в режиме ОУ 140, второй выход которого соединен с входом третьего 143 приемопередатчика, причем выход первого 141 приемопередатчика соединен с первым входом контроллера МКО в режиме КШ 139, второй выход которого соединен со входом второго 142 приемопередатчика, группа входов-выходов которого соединена с первой группой входов-выходов второго 146 трансформатора, вторая группа входов-выходов которого соединена с первой группой входов-выходов второго 150 трансформатора 1 вторая группа входов-выходов которого соединена с первой группой входов-выходов второй пары 154 резисторов, вторая группа входов-выходов которой является резервной магистральной шиной 158, которая соединена с первой группой входов-выходов четвертой пары 156 резисторов, причем вторая 112 адресная шина, вторая 113 шина данных, вторая 114 управляющая шина узла МКО 107 соединены с соответствующими шинами контроллера МКО в режиме ОУ 140, первый 116 выход и первая группа выходов 111 которого соединены с первым выходом и первой группой выходов узла МКО 107, первая 27 адресная шина, первая 28 шина данных, первая 29 управляющая шина которого соединены с соответствующими шинами контроллера МКО в режиме КШ 139, второй вход которого соединен с выходом второго 142 приемопередатчика, причем третий вход контроллера МКО в режиме КШ 139 соединен с третьим 125 входом узла МКО 107, второй 123 выход которого соединен с третьим выходом контроллера МКО в режиме КШ 139, первый 115 и второй 50 входы узла МКО 107 соединены с третьим и четвертым входами контроллера МКО в режиме ОУ 140.
Схема контроля узла МКО 127 содержит первый 159 регистр, второй 160 регистр, третий 161 регистр, четвертый 162 регистр, пятый 163 регистр, шестой 164 регистр, сумматор 165, первую 166 схему сравнения, вторую 167 схему сравнения, первый 168 триггер, второй 169 триггер, третий 170 триггер, четвертый 171 триггер, пятый 172 триггер, элемент И 173, элемент ИЛИ 174, выход которого соединен с инверсными разрешающими входами первого 168 и второго 169 триггеров и инверсным информационным входом третьего 170 триггера, выход которого соединен с информационным входом четвертого 171 триггера и первым входом элемента И 173, выход которого является первым 136 выходом схемы контроля узла МКО 127, первая 111 группа входов которой соединена с информационными группами входов D1, D2, D3, D4, D5 первого 159, второго 160, третьего 161, четвертого 162, пятого 163 регистров соответственно, группы выходов которых соединены с первой, второй, третьей, четвертой группами входов сумматора 165 и первой группой входов первой 166 схемы сравнения соответственно, выход которой соединен с инверсным входом элемента ИЛИ 174 и разрешающим входом шестого 164 регистра, группа выходов которого соединена с первой группой входов второй 167 схемы сравнения, выход которой соединен с прямым входом элемента ИЛИ 174, причем второй 137 и третий 138 выходы схемы контроля узла МКО 127 соединены с выходами первого 168 и второго 169 триггеров, тактовые входы которых соединены с тактовыми входами шестого 164 регистра, третьего 170, четвертого 171 и пятого 172 триггеров, с разрешающими входами первого 159, второго 160, третьего 161, четвертого 162 и пятого 163 регистров и являются первым 116 входом схемы контроля узла МКО 127, второй 50 вход которой соединен с инверсными сбросовыми входами шестого 164 регистра, третьего 170, четвертого 171 и пятого 172 триггеров, выход пятого 172 триггера соединен со вторым входом элемента И 173, третий вход которого соединен с информационным входом пятого 172 триггера и выходом четвертого 171 триггера, причем группа выходов четвертого 162 регистра соединена с информационной группой входов шестого 164 регистра и второй группой входов второй 167 схемы сравнения, первая группа выходов сумматора 165 соединена со второй группой входов первой 166 схемы сравнения, причем шестнадцатый и семнадцатый разряды второго 160 регистра соединены с информационными входами первого 168 и второго 169 триггеров, причем третий 49 вход схемы контроля узла МКО 127 соединен с тактовыми входами первого 159, второго 160, третьего 161, четвертого 162 и пятого 163 регистров.
Модель РП 128 содержит первый 175 усилитель, второй 176 усилитель, третий 177 усилитель, первый 178 ограничитель, второй 179 ограничитель, третий 180 ограничитель, первый 181 сумматор, второй 182 сумматор, третий 183 сумматор, четвертый 184 сумматор, интегрирующее звено 185, дифференцирующее звено 186, компаратор 187, выход которого соединен с выходом «Испр. Мод. «1» модели РП 128, шестой 38 (Uосрм) вход которой соединен с минусовым входом четвертого 184 сумматора, а третий 117 (Uвхрп) вход соединен с первым входом первого 181 сумматора, выход которого соединен с первым входом первого 175 усилителя, выход которого соединен с первым входом первого 178 ограничителя, выход которого соединен с первым входом второго 182 сумматора, выход которого соединен с первым входом второго 176 усилителя, выход которого соединен с первым входом второго 179 ограничителя, выход которого соединен с первым входом третьего 183 сумматора, выход которого соединен с первым входом интегрирующего звена 185, выход которого соединен с минусовым входом второго 182 сумматора и первым входом четвертого 184 сумматора, выход которого соединен с первым входом третьего 177 усилителя и первым входом дифференцирующего звена 186, выход которого соединен с первым входом компаратора 187, второй вход которого соединен со вторыми входами дифференцирующего звена 186, интегрирующего звена 185, первого 178 и второго 179 ограничителей, первого 175, второго 176 и третьего 177 усилителей, с первым входом третьего 180 ограничителя и является четвертым 49 входом модели РП 128, второй 50 вход которой соединен с третьими входами первого 175, второго 176 и третьего 177 усилителей, первого 178 и второго 179 ограничителей, интегрирующего звена 185, дифференцирующего звена 186 и компаратора 187 и со вторым входом третьего 180 ограничителя, выход которого соединен с минусовым входом третьего 183 сумматора, причем выход третьего 177 усилителя соединен с третьим входом третьего 180 ограничителя, причем пятый 37 вход модели РП 128 соединен с минусовым входом первого 181 сумматора.
Система адаптивного управления ЭГСП с контролем работает следующим образом.
Функциональная схема канала адаптивного управления ЭГСП с контролем представлена на фиг. 1. С задатчика 14 положения гидродвигателя входной сигнал управления через шину 31 МКО (мультиплексный канал обмена ГОСТ Р 52070-2003), через МКО-контроллер 15 прерывает 34 процессор 26, который осуществляет доступ через узел МКО 107 к оперативной памяти PID-контролера 25 и записывает в выделенную область двухпортового ОЗУ входной сигнал.
Интерфейс, обеспечивающий доступ к двухпортовому ОЗУ содержит следующие сигналы:
А(18…0) - первая шина адреса 27;
D(15…0) - первая шина данных 28;
RW - режим чтения или записи («1» - чтение, «0» - запись) (второй сигнал первой управляющей шины 29);
RE - разрешение чтения (третий сигнал первой управляющей шины 29);
WE - разрешение записи (четвертый сигнал первой управляющей шины 29);
CS - выбор микросхемы (пятый сигнал первой управляющей шины 29).
Структура области двухпортового ОЗУ PID-контроллера 25 представлена на фиг. 7.
Слово режимов и признаков PID-контроллера 25 состоит из следующих разрядов:
С 0-го (младший) по 2-й разряды - резерв;
- 3-й разряд - режим подачи сигнала «RESET» на микроконвертер 17 («1» - режим выбран, «0» - режим не выбран);
- С 4-го по 7-й разряды - резерв;
- С 12-го по 8-й разряды - количество (от 1 до 32) принятых байт в обмене (количество 32 кодируется кодом «00000»);
- 13-й разряд - режим-признак начала процесса обмена («1» - режим выбран, «0» - режим не выбран) (автоматически становится равным значению режима циклического обмена после завершения очередного обмена);
- 14-й разряд - режим циклического обмена («1» - режим выбран, «0» - режим не выбран);
- 15-й (старший) разряд - признак завершения обмена («1» - признак установлен, «0» - признак не установлен).
Взаимодействие микроконвертера 17 и PID-контроллера 25 осуществляется по 5-проводному интерфейсу, представленному на фиг. 8.
Сигнал RESET 50 может быть установлен в активное состояние в любой момент времени с целью приведения микроконвертера 17, PID-контроллера 25, узла МКО 107 и узла контроля 110 в начальное состояние и прекращения текущего обмена, длительность данного сигнала определяется временем, необходимым для установки микроконвертера 17 в начальное состояние.
Установка сигнала INT_TMS в «1» информирует PID-контроллер 25 о том, что он может начать передавать байты в микроконвертер 17, который в свою очередь должен передавать байты в PID-контроллер 25. Передачей каждого байта управляет микроконвертер 17, инициируя передачу C1…CN сигнала SCLK.
Число байт в одном обмене N должно быть в диапазоне от 2 до 32.
Диаграмма взаимодействия микроконвертера 17 и PID-контроллера 25 представлена на фиг. 9.
Время обнаружения микроконвертером 17 факта потери байта (В) зависит от его скорости реакции.
Установка сигнала INT_TMS в «0» информирует PID-контроллер 25 о том, что обмен завершен, и PID-контроллер 25 не может продолжать передавать и принимать байты.
PID-контроллер 25 не принимает байты после 32-го, при установленном сигнале INT_TMS в «1». После установки сигнала INT_TMS в «0» PID-контроллер 25 фиксирует факт окончания обмена и готов к следующему обмену.
C1…CN содержит тактовый импульс, информирующий о передаче каждого разряда байт T1…TN и R1…RN. Сигнал SCLK между C1…CN равен «0».
Временная диаграмма приема/передачи данных между микроконвертером 17 и PID-контроллером 25 представлена на фиг. 10.
Частота тактового импульса F сигнала SCLK зависит от микроконвертера 17 и определяется его скоростными параметрами (F=1,428 МГц).
По сигналу RESET 50 из микроконвертора 17 PID-контроллер 25 устанавливается в исходное состояние: регистр состояний устанавливается во все«1», инициализируется регистр режимов (0000000000001000) остальные триггера, регистры и счетчики устанавливаются в «0», затем регистр состояний переходит в следующее состояние по сигналу CLOCK 49. В нулевом, первом и втором состоянии выполняется чтение регистра режима по адресу «01000000», анализируется 13-й разряд (режим - признак начала обмена), если 13-й разряд равен «0», то в регистр состояния «state» записываются все «0» и начинается следующий опрос 13-го разряда, если 13-й разряд равен «1», то переходим в следующее состояние.
В состоянии «три», «четыре», «пять» выполняется чтение слова данных по адресу (12…8) регистра режима «mode» с младшим разрядом равным «0» и запись считанного слова в регистр «DAT».
В состоянии «шесть» формируется сигнал, по которому содержимое регистра «DAT» переписывается во второй сдвиговый регистр, выполняется сброс первого счетчика, второго счетчика и триггера.
В состоянии «семь», «восемь», «девять» выполняется запись проинвертированных данных в ячейку двухпортового ОЗУ по адресу (12…8) регистра «mode» с младшим разрядом «0» и чтение слова режима и его анализ. Если третий разряд регистра «mode» равен «1» (есть RESET) или (регистр «mode» (12…8)р. не равны «00000» (ненулевое слово) и сигнал прерывания INT TMS равен «0», то в регистр состояний заносится код «1111», иначе если первый счетчик насчитывает 8 бит, то формируется сигнал, по которому принятое слово в первом сдвиговом регистре записывается в регистр «DAT», если состояние первого счетчика не равно 8 (SCLK_front не равен «1000»), то переход в состояние семь.
В состоянии «десять» выполняется запись принятого слова в ячейку ОЗУ по адресу равному значению счетчика адреса регистра «mode» (12…8) с младшим разрядом «1», затем регистру «mode» (12…8) присваивается значение счетчика адреса («mode» 111 (12…8)+1) в машине состояний, если счетчик адреса «mode» (12…8) равен «11111», то выполняется переход на состояние «одиннадцать», а иначе в состояние «три».
В состоянии «одиннадцать» выполняется чтение слова режима и его анализ. Если есть RESET или (счетчик адреса «mode» (12…8) не равен нулю и сигнал INT_TMS равен «0»), то в регистр состояний заносится код «1111», иначе переходим в состояние «одиннадцать» (ждем когда сигнал прерывания установится в «0»).
В состоянии «пятнадцать» в регистр «mode» (режим) в 15-й разряд записывается «1», которая определяет «признак завершения обмена».
Если между битами недопустимая пауза, то второй счетчик переполнится и сбросит первый счетчик.
Данные, поступающие из PID-контроллера 25 в микроконвертер 17 содержат следующую информацию:
 - величина заданного положения горизонтального оперения (UвхРП) с 0-го по 15-й разряды;
- величина заданного положения горизонтального оперения (UвхРП) с 0-го по 15-й разряды;
командное слово:
 включение УМ 18 - 13-й разряд.
включение УМ 18 - 13-й разряд.
Данные, поступающие из микроконвертера 17 в PID-контроллер 25 содержат следующую информацию:
величина текущего положения горизонтального оперения (ДОС 3 гидродвигателя) - с 0-го по 15-й разряды;
сигнал рассогласования внешнего контура с 0-го по 15-й разряды;
сигнал ДПТ 8 РМ - с 0-го по 15-й разряд;
слово разовых команд 1:
исправность ДОС 3 гидродвигателя - 14-й разряд;
исправность ДПТ 8 РМ - 13-й разряд;
исправность УМ 18 - 11-й разряд;
слово состояния ЭГСП:
УМ 18 включен по команде из МКО - 13-й разряд;
состояние питания УМ 18 - 11-й разряд;
отказ МКО-контроллера 15 - с 17-го по 10-й разряды;
отказ микроконвертера 17 - с 18-го по 9-й разряды;
счетчик перезапуска - с 0-го по 2-й разряды.
Адаптивное управление ЭГСП с контролем обеспечивается микроконвертером 17 ADuC841 с тактовой частотой 16,77 МГц. Основные технические характеристики микроконвертера 17 ADuC841:
микропроцессорное ядро 8052 с пиковой производительностью 20 MIPS и системой команд 8051;
флэш-память (62 Кбайт - программная память и 4 Кбайт - память данных) на кристалле с возможностью перепрограммирования до 100000 раз;
ОЗУ данных 2304 байт на кристалле;
высокоскоростной АЦП 8 каналов 12 разрядов со встроенным источником опорного напряжения и возможностью работы в режиме прямого доступа к памяти;
два ЦАП 12 разрядов с возможностью работы в режиме широтно-импульсной модуляции;
встроенный датчик температур;
интервальный таймер;
асинхронный последовательный приемо-передатчик UART;
последовательный интерфейс I2C/SPI;
сторожевой таймер;
монитор питания.
Частота дискретизации F0=500 Гц (Т0=2 мс). Для оцифровки аналоговых сигналов в микроконвертере 17 предусмотрены 12-разрядные АЦП и ЦАП, рассчитанные для диапазона входных сигналов 10 В. Учет эффектов квантования сигналов по уровню производиться не будет, так как при заданной разрядности АЦП и ЦАП действие данных факторов незначительно. Если в цифровой системе управления период дискретизации Т0 удовлетворяет условию  (ωп=50 Гц), то адаптивный регулятор выбираем с эталонными моделями (ЭМ).
(ωп=50 Гц), то адаптивный регулятор выбираем с эталонными моделями (ЭМ).
Структурная схема алгоритма адаптивного управления ЭГСП представлена на фиг. 11. Структурная схема адаптивного управления состоит из двух контуров позиционирования - внутреннего и внешнего. Внутренний контур позиционирования включает в себя адаптивный регулятор с ЭМ для сервопривода. Внешний контур позиционирования включает в себя регулятор с ЭМ для привода.
Адаптивные регуляторы с ЭМ обеспечивают уменьшение разброса внутренних параметров привода (сервопривода), компенсируют влияние позиционной нагрузки, давление рабочей жидкости, изменение температуры, погрешность серийного производства.
На вход адаптивного регулятора с ЭМ для привода (сумматор 223, усилитель 224, ограничитель 225 и интегратор-усилитель 226) поступает Ubx (сигнал задания ЭГСП), а также сигнал 37 с датчика перемещения выходного звена гидропривода. В адаптивном регуляторе происходит сравнение (сумматор 227) желаемого перемещения штока привода, которое задается ЭМ первого порядка, с его действительным перемещение, формируя таким образом ошибку «е». Адаптивный сигнал АР1 вырабатывается на основе как самой ошибки «е», так и ее производной. Производная от ошибки «е» вычисляется при помощи реального интегродифференциального фильтра (усилитель 228, инерционно форсирующее звено 229, ограничитель 230, усилитель 231).
На вход адаптивного регулятора с ЭМ для сервопривода (сумматор 197, усилитель 198, ограничитель 199, сумматор 200) поступает сигнал АР2, сформированный из Ubx (сигнал задания ЭГСП), просуммированного на сумматоре 187 с сигналом 37 с датчика перемещения выходного звена гидропривода усиленного 188 и просуммированного на сумматоре 189 с адаптивным сигналом АР1 и ограниченного по скорости 190. В адаптивном регуляторе с ЭМ для сервопривода (сумматор 197, усилитель 198, ограничитель 199, сумматор 200, интегратор - усилитель 201, сумматор 202, усилитель 203, ограничитель 208) происходит сравнение (сумматор 202) сигнала АР3 с сигналом 38 с ДПТ 8 положения штока РМ, которое задается ЭМ первого порядка, формируя таким образом ошибку «d».
Адаптивный сигнал АР4 вырабатывается на основе как самой ошибки «d», так и ее производной. Производная от ошибки «d» вычисляется при помощи интегродифференциального фильтра (усилитель 204, инерционно форсирующее звено 205, ограничитель 206, усилитель 207). Адаптивный сигнал АР2, просуммированный с сигналом 38 с ДПТ 8 положения штока РМ и с сигналом АР4, через усилитель 192 и ограничитель 193 поступает на фильтр для подавления импульсных помех (триггеры 194, 195, фильтр 196), а затем на выход 45 микроконвертера 17. Далее сигнал управления через элемент 24 ИЛИ и УМ 18 поступает в обмотку управления 5 ЛЭД 4, вызывая пропорциональное сигналу управления смещение от нейтрального положения якоря и непосредственно соединенного с ним золотника РМ 6. Рабочая жидкость под давлением через открытые щели в золотнике поступает в камеры двухсистемной РМ 7, перемещая шток РМ и связанный с ним сдвоенный золотник 1, который управляет перемещением сдвоенного исполнительного гидродвигателя 2 положение которого измеряется ДОС 3, установленным на штоке сдвоенного исполнительного гидродвигателя 2. Выходное напряжение с ДОС 3 поступает на вход второго 20 усилителя, с выхода которого поступает на второй вход 37 микроконвертера 17, образуя, таким образом, замкнутый контур ЭГСП. Выходное напряжение с ДПТ 8 РМ поступает на вход третьего 21 усилителя, с выхода которого поступает на четвертый 38 вход микроконвертера 17. Следящий привод РМ образует внутренний контур ЭГСП. Анализ амплитудно-фазовых частотных характеристик (АФЧХ) РМ свидетельствует о достаточной эффективности адаптивных алгоритмов управления привода, обеспечивающих при изменении уровня давления Рн=20÷27 МПа практически стабильные АФЧХ привода, что не требует использования в алгоритмах коррекции величин его параметров по информации об уровне Рн. При Рн=27 МПа АФЧХ привода практически не зависят от нагружения штока привода. При снижении уровня давления до Рн=20 МПа в полосе частот до 5 Гц АФЧХ привода практически не зависят от нагружения на его штоке и только в районе с частотой Т≥10 Гц имеет место незначительное уменьшение коэффициента передачи привода. Поскольку в цифровых системах управления физически всегда присутствует временное запаздывание на выработку и выдачу управляющего сигнала, а данное запаздывание может оказывать существенное влияние на динамические свойства адаптивной системы с сигнальной настройкой, то в модели цифровых адаптивных сервоприводов вводится звено чистого запаздывания. Величина данного запаздывания выбирается порядка Т=0,1⋅Т0 для заданной частоты дискретизации, что должно быть обеспечено при аппаратной и программной реализации цифровой системы управления, и является достаточной для приемлемого качества адаптивного управления в рамках заданных изменений характеристик объекта управления.
В прототипе вводится два вида контроля - аппаратный контроль и контроль корректирующего устройства с моделью. Встроенный контроль необходим для своевременного обнаружения и отключения неисправного устройства в процессе его работы при появлении отказов в элементах привода и во взаимодействующих с ним системах. Для этого необходимо определить устройство, в котором произошел отказ на возможно меньшем энергетическом уровне, и отключить его. Проводится непрерывный контроль работоспособности каналов управления привода и его отдельных элементов с формированием признака исправности:
ДОС 3. Входной сигнал 47 с ДОС 3 поступает (37) на модель компаратора 219 и задержки 220, если он попадает в диапазон напряжения установленного для контроля, то датчик считается исправным, в противном случае датчик неисправен;
ДПТ 8. Входной сигнал 48 с ДПТ 8 РМ поступает (38) на модуль компаратора 221 и задержки 222, если он попадает в диапазон напряжения установленного для контроля, то датчик считается исправным, в противном случае датчик неисправен;
УМ 18. Входной сигнал 40 «контроль тока» на модели усиливается 214, ограничивается 215 и сравнивается 216 с выходным сигналом 45, поступающим через реально дифференцирующее звено 209, результат сравнения поступает через реально дифференцирующее звено 217 на модель компаратора 218 и если он попадает в диапазон напряжения установленного для контроля, то УМ 18 исправен, в противном случае УМ 18 неисправен.
Если любой из этих признаков отсутствует, то через элемент 24 блокируется работа УМ 18.
В данном изобретении вводится контрольная функция непосредственного управления приводом конструктивно приближенная к самому приводу, что позволяет уменьшить время реакции на неисправность и отключить неисправный канал резервирования. Увеличение глубины контроля работоспособности привода увеличивает вероятность обнаружения и отключения неисправного канала из контура управления, а так как все четыре канала управляют единым штоком, то неисправный канал будет противодействовать исправным, снижая динамику управления.
В данном изобретении для выполнения аппаратного контроля вводятся узел МКО 107, улучшающий помехозащищенность и точность системы, и узел контроля (модель) 110, повышающий надежность системы за счет введения в каждом резервном канале привода системы контроля (типа канал - модель), и контроль питания 108. Контроль питания 108 определяет находится ли напряжение питания в выбранном диапазоне, и выполнен на компараторах.
Функциональная схема узла контроля представлена на фиг. 3.
В состав узла контроля 110 входят схема контроля узла МКО 127, первый 130 (0.02 с) и второй 131 (0.1 с) элементы задержек, формирователь импульса 129, первый 132, второй 133 и третий 134 элементы И, элемент ИЛИ 135 и модель РП 128. Элементы задержек 130 и 131 должны обеспечивать указанную на функциональной схеме задержку с точностью не хуже 1 мс. Формирователь импульса 129 должен обеспечивать формирование лог. «1» на своем выходе длительностью 500 мс при наличии перепада из «0» в «1» в 16 бите второго слова данных (СД2) (перезапуск). В начальный момент времени (по включению питания) состояние битов «Вкл УМ» (17 бит СД2) и «Перезапуск» (16 бит СД2) - лог.«0», выходная разовая команда «Вкл УМ» должна находиться в состоянии лог.«0».
Наличие аппаратной модели непосредственно у привода позволяет процессору упростить модель прототипа и освободить вычислительные ресурсы.
Модель РП, представленная на фиг. 6, является эталоном для координат рулевой машины.
Контрольная функция привода определяется посредством сравнения результата вычисления координат привода (модель) с результатом канала по входным данным, полученного с датчика ДОС ГД 3, совпадение результатов определяет исправен привод или нет. Если результат не совпадает, то вырабатывается сигнал неисправность привода и выключается усилитель мощности данного канала, тем самым отключая канал от штока.
Модель отражает наиболее существенные динамические свойства рулевого привода в расчетной области частот управления. Динамические свойства обеспечиваются выбором параметров КРМ1 176 и КРМ2 185 (их произведение КРМ1×КРМ2 определяет расчетную добротность модели).
Ограничитель 179 определяет расчетную максимальную скорость выхода модели.
Ограничитель 178 определяет рабочий диапазон входного сигнала.
Модель имеет внутреннюю обратную связь для динамической подстройки выхода модели под реальную динамику привода для исключения ложного срабатывания в расчетном диапазоне изменения температур рабочего тела привода (-60°C до +150°C).
Глубина подстройки определяется выбором усилителя 177 КРМ3 и ограничителя 180.
186 - апериодическая временная задержка на срабатывание системы контроля.
187 - определение расчетного диапазона исправного состояния (порог на срабатывание системы контроля).
Также модель состоит из усилителя 176, сумматора 182 и сумматора 184.
Функциональная схема контроля узла МКО 127 представлена на фиг. 5.
В состав схемы контроля узла МКО 127 входят первый регистр 159, второй регистр 160, третий регистр 161, четвертый регистр 162, пятый регистр 163, шестой регистр 164, сумматор 165, первая схема сравнения 166, вторая схема сравнения 167, первый триггер 168, второй триггер 169, третий триггер 170, четвертый триггер 171, пятый триггер 172, элемент И 173 и элемент ИЛИ 174.
В целях обеспечения помехоустойчивости информационного обмена в посылки формата 1 (КС+СД1+СД2+СД3) МКИО вводятся два дополнительных слова данных: СД4 (счетчик обменов) и СД5 (контрольная сумма информационной посылки, формируемая, как инверсия 16-разрядной арифметической суммы слов данных с учетом переносов из старшего разряда).
При правильном функционировании системы и линии передачи информации значения СД4 должны различаться при любых последовательных обменах, а контрольная сумма посылки вычисляется в соответствии со следующим алгоритмом:
вычислить арифметическую сумму SUM=СД1+СД2+СД3+СД4 (SUM - 18 разрядов);
выделить старших 2 разряда и сложить с младшими 16 разрядами, перенос выбрасывается CS=(SUM&0×ffff)+(SUM>>16); (CS - 16 разрядов);
проинвертировать (CS=~CS).
Вычисленная контрольная сумма по приведенному алгоритму сравнивается с СД5 (передаваемая контрольная сумма), если они совпадают, то информационное сообщение достоверно, если нет, то информационное сообщение недостоверно. Помимо этого 4-ое слово данных сообщения содержит уникальный код, для каждого информационного сообщения и соответственно на второй схеме сравнения 167 сравнивается текущий код с кодом принятым в предыдущем информационном сообщении, если они совпали, то сообщение считается недостоверным.
В случае если три сообщения подряд (третий триггер 170, четвертый триггер 171, пятый триггер 172 и элемент И 173) принимаются достоверными, то происходит выдача сигнала «Вкл. УМ», в противном случае усилитель мощности блокируется.
При наличии перепада из «0» в «1» в 16 бите второго слова данных (СД2) на втором триггере 169 формируется сигнал 138 «перезапуск МКО».
При наличии перепада из «0» в «1» в 17 бите второго слова данных (СД2) на первом триггере 168 формируется сигнал 137 «Вкл. УМ МКО».
Приближение микроконтроллера непосредственно к приводу позволило существенно повысить точность управления за счет снижения потерь передачи аналоговых сигналов управления обмотками и контроля ДОС ГД 3 и ДПТ РМ 8, как следствие повысилась помехоустойчивость передачи информации так и система в данном изобретении стала конструктивно распределенной, что повышает живучесть системы.
Структурная схема узла МКО представлена на фиг. 4.
В состав узла МКО входят контроллер МКО 139 в режиме КШ, контроллер МКО 140 в режиме ОУ, первый 141 приемопередатчик, второй 142 приемопередатчик, третий 143 приемопередатчик, четвертый 144 приемопередатчик, первый 145 трансформатор, второй 146 трансформатор, третий 147 трансформатор, четвертый 148 трансформатор, первый 149 трансформатор 1 второй 150 трансформатор 1 третий 151 трансформатор 1 четвертый 152 трансформатор 1 первая пара 153 резисторов, вторая пара 154 резисторов, третья пара 155 резисторов, четвертая пара 156 резистор. Первый 115, второй 50 и третий 125 входы узла МКО 107 соединены с третьим и четвертым входами контроллера МКО в режиме ОУ 140 и с третьим входом контроллера МКО в режиме КШ 139 соответственно.
Интерфейс функционирует асинхронно, в режиме «команда-ответ». Передача информации осуществляется полудуплексным способом. Инициирование обмена информацией и управление передачей осуществляет только один контроллер шины. Поток информации, передаваемый по информационной магистрали состоит из сообщений, содержащих командное слово, ответное слово, слово данных, с характеристиками передачи информации определенными в п. 4.4 и 4.3 ГОСТа Р 52070-2003 соответственно.
Источники информации
1. INTERNATIONAL SYMPOSIUM OF «HYDRAULIC SYSTEMS AND ACTUATORS OF AIRCRAFTS» September 93, SAMARA, RUSSIA. DIRECT DRIVE VALVE TECHNOLOGY. PHILOSOPHY and CAPABILITY. By RANBIR BHATTI, MARKETING MANAGER of S.A.B.C.A. and ANDRE HUBERT, CHIEF ENDINEER of S.A.B.C.A. стр. 17/28, 27/28, 29, 30.
2. Aircraft Flight Control Actuation System Design - E.T. Raymond, C.C. Chenoweth, Society of Automotive Engineers, 1993 г., с. 104-116, рис. 4-53, рис. 4-55, рис. 4-57.
3. Патент RU №2430397 кл G05B 11/01, В64С 13/40, F15B 9/03, 2009 г. (прототип).
4. Микросхема интегральная (МКО-контроллер) APA450PQ208I (ACTEL) карта заказа ЮШКР.430103.326 Д16, ФГУП «НИИ «Субмикрон».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ПАРАЛЛЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА С ПРОГРАММИРУЕМОЙ АРХИТЕКТУРОЙ | 2012 |
|
RU2486581C1 |
| ТРЕХКАНАЛЬНАЯ РЕЗЕРВИРОВАННАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 2008 |
|
RU2387000C1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 2001 |
|
RU2216760C2 |
| Трехканальная резервированная управляющая система С-01 | 2015 |
|
RU2618365C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО КАТАПУЛЬТНОГО КРЕСЛА ДЛЯ САМОЛЕТА | 2017 |
|
RU2669720C1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| БОРТОВОЙ СПЕЦВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2522852C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |




Система адаптивного управления электрогидравлическим следящим приводом с контролем содержит сдвоенный золотник, сдвоенный исполнительный гидродвигатель, датчик обратной связи, линейный электродвигатель (ЛЭД) с обмоткой управления, модуль электрогидравлического усилителя, двухсистемную рулевую машинку, четыре канала адаптивного управления (КАУ), четыре контроллера межмашинного обмена (КМО), четыре приемопередачика. Канал адаптивного управления содержит задатчик, МКО-контроллер, процессор, узел МКО, PID – контроллер, микроконвертер, узел контроля, пять усилителей, усилитель мощности, элемент ИЛИ, соединенные определенным образом. Узел контроля содержит схему контроля узла МКО, модель рулевого привода (РП), формирователь импульса, два элемента задержки, три элемента И, элемент ИЛИ, соединенные определенным образом. Схема контроля узла содержит шесть регистров, сумматор, две схемы сравнения, пять триггеров, элементы И и ИЛИ, соединенные определенным образом. Модель РП содержит три усилителя, три ограничителя, четыре сумматора, интегрирующее и дифференцирующее звено, компаратор, соединенные определенным образом. Обеспечивается повышение помехозащищенности, точности и надежности системы адаптивного управления. 4 з.п. ф-лы, 11 ил.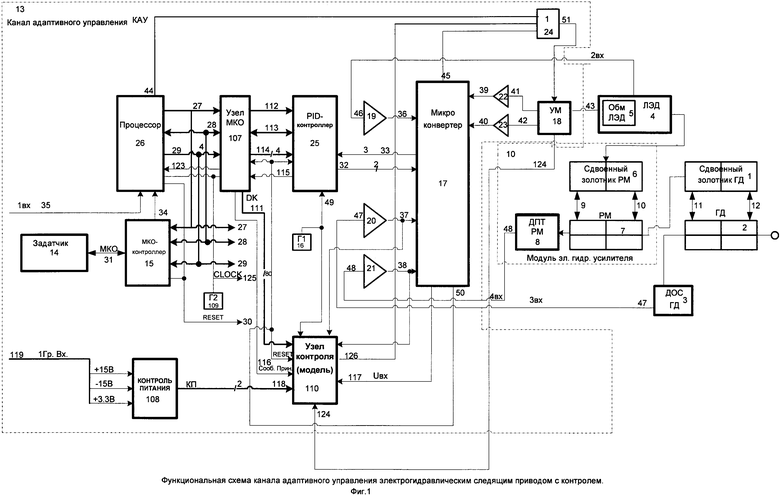
1. Система адаптивного управления электрогидравлическим следящим приводом (ЭГСП) с контролем, содержащая сдвоенный золотник, управляющий сдвоенным исполнительным гидродвигателем, на штоке которого установлен датчик обратной связи (ДОС), линейный электродвигатель (ЛЕД) с обмоткой управления, соединенный с модулем электрогидравлического усилителя, включающим в себя сдвоенный золотник рулевой машинки (РМ), соединенный с якорем ЛЕД, и двухсистемную РМ, на штоке которой установлен датчик постоянного тока (ДПТ) положения РМ, которая соединена двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами двухсистемной рулевой машинкой, причем сдвоенный золотник гидродвигателя соединен двумя двунаправленными входами-выходами с двумя двунаправленными входами-выходами сдвоенного исполнительного гидродвигателя, первый канал адаптивного управления (КАУ), содержащий задатчик, МКО-контроллер, генератор, микроконвертер, усилитель мощности, первый, второй, третий, четвертый, пятый усилители, элемент ИЛИ, PID-контроллер и процессор, соединенный первой адресной шиной, первой двунаправленной шиной данных и первой управляющей шиной МКО контроллера и с соответствующими шинами системы адаптивного управления ЭГСП с контролем, причем первый выход КАУ соединен с первым выходом процессора и с выходом МКО контроллера, мультиплексная шина которого соединена с задатчиком, причем первая группа выходов PID-контроллера соединена с первой группой входов микроконвертера, первая группа выходов которого соединена с первой группой входов PID-контроллера, причем первый и второй входы процессора соединены с выходом МКО-контроллера и первым входом канала адаптивного управления соответственно, причем первый, второй, третий, четвертый, пятый входы микроконвертера соединены с выходами первого, второго, третьего, четвертого, пятого усилителя соответственно, входы четвертого и пятого усилителей соединены с первым и вторым выходами УМ, третий выход которого является вторым выходом КАУ и соединен с обмоткой ЛЭД, первый и второй входы элемента ИЛИ соединены с выходом процессора и первым выходом микроконвертера, причем вход первого усилителя является вторым входом КАУ и соединен с выходом обмотки ЛЭД, вход второго усилителя является третьим входом КАУ и соединен с ДОС положения гидродвигателя, вход третьего усилителя является четвертым входом КАУ и соединен с ДПТ РМ, причем первый генератор соединен со вторым входом PID-контроллера, первый вход которого соединен со вторым выходом микроконвертера, а выход элемента ИЛИ соединен со входом усилителя мощности, а также система адаптивного управления ЭГСП с контролем содержит вторую, третью и четвертую обмотки ЛЭД, второй, третий, четвертый датчики ДОС гидродвигателя, второй, третий, четвертый датчики ДПТ РМ, второй, третий и четвертый каналы КАУ, первый, второй, третий, четвертый контроллеры межмашинного обмена (КМО), первый, второй, третий, четвертый передатчики, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый приемники, группы выходов которых соединены с первой, второй, третьей группами входов первого, второго, третьего, четвертого КМО соответственно, первые, вторые, третьи выходы которых соединены с первыми входами приемников соответственно, причем второй вход первого приемника соединен с выходом второго передатчика, со вторыми входами восьмого и одиннадцатого приемников, выход первого передатчика соединен со вторыми входами четвертого, седьмого, десятого приемников, выход третьего передатчика соединен со вторыми входами второго, пятого, двенадцатого приемников, выход четвертого передатчика соединен со вторыми входами третьего, шестого, девятого приемников, группы входов первого, второго, третьего, четвертого передатчиков соединены с группами выходов первого, второго, третьего, четвертого КМО соответственно, четвертые выходы которых соединены с первыми входами первого, второго, третьего, четвертого КАУ соответственно, первая адресная шина, первая шина данных и первая управляющая шина которых соединены с адресной шиной, шиной данных и управляющей шиной первого, второго, третьего, четвертого КМО, причем вторые входы второго, третьего и четвертого КАУ соединенные с выходами второй, третьей и четвертой обмотками ЛЭД соответственно, входы которых соединены со вторыми выходами второго, третьего, четвертого КАУ, третьи и четвертые входы которых соединены с выходами вторых, третьих, четвертых датчиков ДОС ГД и ДПТ РМ соответственно и в каждый канал КАУ системы дополнительно введены узел МКО, контроль питания, второй генератор, узел контроля, первая группа входов соединена с первой группой выходов узла МКО, соединенного второй адресной шиной, второй двунаправленной шиной данных и второй управляющей шиной с соответствующими шинами PID контроллера, первый выход которого соединен с первым входом узла МКО, первый выход которого соединен с первым входом узла контроля, третий вход и вторая группа входов которого соединены с третьим выходом микроконвертера и группой выходов контроля питания соответственно, группа входов которого соединена с первой группой входов системы адаптивного управления ЭГСП с контролем, вторая, третья и четвертая группы входов которой соединены со вторым, третьим и четвертым КАУ соответственно, причем первая адресная шина, первая двунаправленная шина данных и первая управляющая шина узла МКО соединены с соответствующими шинами процессора, третий вход которого соединен со вторым выходом узла МКО, третий вход которого соединен с первым входом PID контроллера, со вторым выходом микроконвертера и вторым входом узла контроля, четвертый вход которого соединен с четвертым выходом усилителя мощности, причем выход второго генератора соединен с четвертыми входами процессора и узла МКО и является третьим выходом КАУ, который соединен с пятым входом первого, второго, третьего и четвертого КМО, причем выход и четвертый, пятый и шестой входы узла контроля соединены с третьим входом элемента ИЛИ, выходом первого генератора, выходом второго усилителя и выходом третьего усилителя соответственно.
2. Система адаптивного управления ЭГСП с контролем по п. 1, отличающаяся тем, что узел контроля содержит схему контроля узла МКО, модель рулевого привода (РП), формирователь импульса, первый элемент задержки, второй элемент задержки, первый элемент И, второй элемент И, третий элемент И, элемент ИЛИ, выход которого соединен с первым входом третьего элемента И, выход которого является первым выходом узла контроля, первая группа входов которого соединена с первой группой входов схемы контроля узла МКО, первый выход которой соединен со вторым входом третьего элемента И, третий вход которого соединен с выходом второго элемента задержки, первый вход которой соединен с выходом первого элемента И, входы которого являются третьей группой входов узла контроля, вторая группа входов соединена с группой входов модели РП, выход которой соединен с четвертым входом третьего элемента И, причем третий вход узла контроля соединен с первыми входами схемы контроля узла МКО, модели РП, первого и второго элементов задержек и формирователя импульсов, второй вход которого соединен со вторыми входами схемы контроля узла МКО, модели РП, первого и второго элементов задержек и является вторым входом узла контроля, первый вход которого соединен с третьим входом схемы контроля узла МКО, второй выход которого соединен с первым входом второго элемента И, выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом формирователя импульсов, третий вход которого соединен с третьим выходом схемы контроля узла МКО, причем четвертый вход узла контроля соединен с третьим входом первого элемента задержки, выход которой соединен со вторым входом второго элемента И.
3. Система адаптивного управления ЭГСП с контролем по п. 1, отличающаяся тем, что узел МКО содержит контроллер МКО в режиме контроллера шины (КШ), контроллер МКО в режиме оконечного устройства (ОУ), первый приемопередатчик, второй приемопередатчик, третий приемопередатчик, четвертый приемопередатчик, первый трансформатор, второй трансформатор, третий трансформатор, четвертый трансформатор, первый трансформатор 1, второй трансформатор 1, третий трансформатор 1, четвертый трансформатор 1, первую пару резисторов, вторую пару резисторов, третью пару резисторов, четвертую пару резисторов, первая группа входов-выходов которой соединена с первой группой входов-выходов четвертого трансформатора 1, вторая группа входов-выходов которого соединена с первой группой входов-выходов четвертого трансформатора, вторая группа входов-выходов которого соединена с группой входов-выходов четвертого приемопередатчика, выход которого соединен с первым входом контроллера МКО в режиме ОУ, первый выход которого соединен со входом четвертого приемопередатчика, причем первый выход контроллера МКО в режиме КШ соединен со входом первого приемопередатчика, группа входов-выходов которого соединена с первой группой входов-выходов первого трансформатора, вторая группа входов-выходов которого соединена с первой группой входов-выходов первого трансформатора 1, вторая группа входов-выходов которого соединена с первой группой входов-выходов первой пары резисторов, вторая группа входов-выходов которой является магистральной шиной, которая соединена с первой группой входов-выходов третьей пары резисторов, вторая группа входов-выходов которой соединена с первой группой входов-выходов третьего трансформатора 1, вторая группа входов-выходов которого соединена с первой группой входов-выходов третьего трансформатора, вторая группа входов-выходов которого соединена с группой входов-выходов третьего приемопередатчика, выход которого соединен со вторым входом контроллера МКО в режиме ОУ, второй выход которого соединен с входом третьего приемопередатчика, причем выход первого приемопередатчика соединен с первым входом контроллера МКО в режиме КШ, второй выход которого соединен со входом второго приемопередатчика, группа входов-выходов которого соединена с первой группой входов-выходов второго трансформатора, вторая группа входов-выходов которого соединена с первой группой входов-выходов второго трансформатора 1, вторая группа входов-выходов которого соединена с первой группой входов-выходов второй пары резисторов, вторая группа входов-выходов которой является резервной магистральной шиной, которая соединена с первой группой входов-выходов четвертой пары резисторов, причем вторая адресная шина, вторая шина данных, вторая управляющая шина узла МКО соединены с соответствующими шинами контроллера МКО в режиме ОУ, первый выход и первая группа выходов которого соединены с первым выходом и первой группой выходов узла МКО, первая адресная шина, первая шина данных, первая управляющая шина которого соединены с соответствующими шинами контроллера МКО в режиме КШ, второй вход которого соединен с выходом второго приемопередатчика, причем третий вход контроллера МКО в режиме КШ соединен с третьим входом узла МКО, второй выход которого соединен с третьим выходом контроллера МКО в режиме КШ, первый и второй входы узла МКО соединены с третьим и четвертым входами контроллера МКО в режиме ОУ.
4. Система адаптивного управления ЭГСП с контролем по п. 1, отличающаяся тем, что схема контроля узла МКО содержит первый регистр, второй регистр, третий регистр, четвертый регистр, пятый регистр, шестой регистр, сумматор, первую схему сравнения, вторую схему сравнения, первый триггер, второй триггер, третий триггер, четвертый триггер, пятый триггер, элемент И, элемент ИЛИ, выход которого соединен с инверсными разрешающими входами первого и второго триггеров и инверсным информационным входом третьего триггера, выход которого соединен с информационным входом четвертого триггера и первым входом элемента И, выход которого является первым выходом схемы контроля узла МКО, первая группа входов которой соединена с информационными группами входов D1, D2, D3, D4, D5 первого, второго, третьего, четвертого, пятого регистров соответственно, группы выходов которых соединены с первой, второй, третьей, четвертой группами входов сумматора и первой группой входов первой схемы сравнения соответственно, выход которой соединен с инверсным входом элемента ИЛИ и разрешающим входом шестого регистра, группа выходов которого соединена с первой группой входов второй схемы сравнения, выход которой соединен с прямым входом элемента ИЛИ, причем второй и третий выходы схемы контроля узла МКО соединены с выходами первого и второго триггеров, тактовые входы которых соединены между собой и с тактовыми входами шестого регистра, третьего, четвертого и пятого триггеров, с тактовыми входами первого, второго, третьего, четвертого и пятого регистров и являются первым входом схемы контроля узла МКО, второй вход которой соединен с инверсными сбросовыми входами шестого регистра, третьего, четвертого и пятого триггеров, выход четвертого триггера соединен со вторым входом элемента И, третий вход которого соединен с информационным входом пятого триггера, причем группа выходов четвертого регистра соединена с информационной группой входов шестого регистра и второй группой входов второй схемы сравнения, группа выходов сумматора соединена со второй группой входов первой схемы сравнения, причем шестнадцатый и семнадцатый разряды второго регистра соединены с информационными входами первого и второго триггеров.
5. Система адаптивного управления ЭГСП с контролем по п. 1, отличающаяся тем, что модель РП содержит первый усилитель, второй усилитель, третий усилитель, первый ограничитель, второй ограничитель, третий ограничитель, первый сумматор, второй сумматор, третий сумматор, четвертый сумматор, интегрирующее звено, дифференцирующее звено, компаратор, выход которого соединен с выходом «Испр. Мод. «1» модели РП, шестой (Uосрм) вход которой соединен с минусовым входом четвертого сумматора, а третий (Uвхрп) вход соединен с первым входом первого сумматора, выход которого соединен с первым входом первого усилителя, выход которого соединен с первым входом первого ограничителя, выход которого соединен с первым входом второго сумматора, выход которого соединен с первым входом второго усилителя, выход которого соединен с первым входом второго ограничителя, выход которого соединен с первым входом третьего сумматора, выход которого соединен с первым входом интегрирующего звена, выход которого соединен с минусовым входом второго сумматора и первым входом четвертого сумматора, выход которого соединен с первым входом третьего усилителя и первым входом дифференцирующего звена, выход которого соединен с первым входом компаратора, второй вход которого соединен со вторыми входами дифференцирующего звена, интегрирующего звена, первого и второго ограничителей, первого, второго и третьего усилителей, с первым входом третьего ограничителя и является четвертым входом модели РП, второй вход которой соединен с третьими входами первого, второго и третьего усилителей, первого и второго ограничителей, интегрирующего звена, дифференцирующего звена и компаратора и со вторым входом третьего ограничителя, выход которого соединен с минусовым входом третьего сумматора, причем выход третьего усилителя соединен с третьим входом третьего ограничителя, причем пятый вход модели РП соединен с минусовым входом первого сумматора.
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| RU 2011130280 A, 27.01.2013 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| JP 2000170704 A, 20.06.2000 | |||
| ЭЛИНВАРНЫЙ МАРТЕНСИТНОСТАРЕЮЩИЙ СПЛАВ | 1992 |
|
RU2026406C1 |

