(54) СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКНМИ
I
Изобретение отнсюится к манипулято- ростроению и может быть использовано при создании систем управления манипуляторами, установленными на самоходном подвижном основании, электрогидравлические приводы которых получают энергию от одного автономного источника питания.
Известна система управления электрогидравлическими манипуляторами, содержащая по каждой регулируемой коорд1гаате гидродБИгателъ, золотниковый гидрораспределитель с электрогидравлическим управлением, датчик положения задающего органа, датчик положения исполнительного органа, сумматор и усилитель l.
Такая система не исключает функциональные отказы след5апих гидроприводов манипулятора, вызванные падением давл&ния питания при перегрузке автономного источника питания.
Наиболее близкой к предлагаемой является система, содержащая каналы регулирования, состоящие из последовательно
МАНИПУЛЯТОРАМИ
соединенных датчика суммарного расхода, первого сумматора, порогового элЕ 1ента и по каждой регулируемой координате подсистемы, последовательно соединенные второй сумматор, усилитель, управляемый ограничитель, гидропривод и датчик обратной связи, выход которого подключен ко второму входу второгхз сумктатора, а выход порогового элемента соединен со вторыми входами управляе(1ых ограничителей 2j,
Недостатком этой системы является снижение качества работы системы иэ-аа отсутствия у подсистемы приводов, наиболее важной для успешного выполнения рабочих движений преимуп1ественно перед другими приводами в получении необходимой для их движения энергии.
Целью изобретения является расширение функциональных возк ожностей системы.
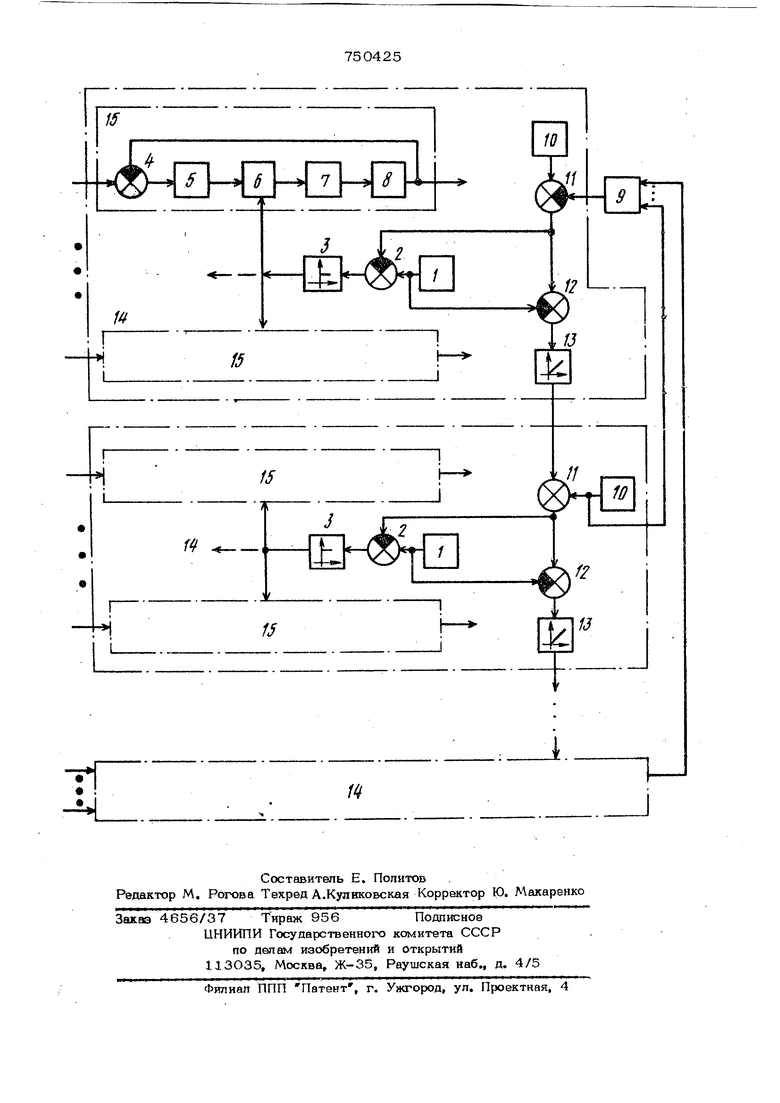
Это достигается т&л, что система содержит общий су -1матор и в каждом канале регулирования поспедователъно соединенные источник эталонного сигнала, сумматор, четвертый сумматор и элемент с односторонней проводимостью, Bbtход третьего сумматора подключен ко вто рому входу первого сумматора, выход датчика суммарного расхода соэдинен со вторым входом четвертого сумматора, выход источника эталонного сигнала каждого канала, кроме первого, подключен к соот ветс-гаующему входу общего сумматора, выход которого соединен со вторым входом третьего сумматора первого канала, а выход элемента с односторонней проводимостью каждого канала подключен ко второму входу третьего сумматора последующего канала, На чертеже дана функциональная схема системы. На схеме показано: 1 - датчик суммарного расхода; 2 - первый сумматор;, 3 пороговый элемент; 4 - -второй сумматор; 5 - усилитель 6 - управляемый ограничитель 7 - 1 идропривод; 8 - датчи .обратной связку 9 - общий сумматор-, Юисточник эталонного сигнала 11 - третий сумматор; 12 четвертый сумматор; 13 - элемент с односторонней проводимостью; 14 - каналы pei-улирования ; 15 регулируеляые координаты. Системы управления эпектрогшравлическим манипулятором работает следующш образом. . Выходной сигнал источника 10 эталонного сигнала первой подсистемы пропорционален допустимой величине расхода, которая может потребляться всей системой, не вызывая перегрузки источника пи тания. Вьходные сигналы источников 1О эталонных сигналов других каналов 14 пропорциональны расходам, потребляемым гидроприводами 7 этих каналов в режимах удержания груза. На выходах третьих сумматоров 11 образуется сигнал допустимой величины расхода, который может потребляться каналом 14, а на выходе четвертого сумматора 12 - сигнал разнос ти между допустимой и действительной величиной потребляемого расхода. Если этот сигнал положителен, т. е. канал 14 потребляет не:весь расход, отведенны на ее функционирование, на выходе элемента 13 с огшосторонней проводимостью по51вляется ненулевой сигнал добавки к cjOTiany источника 10 эталонного сигнала следующего канала 14, т. е. подсистемы с номером на единицу больше. Таким образом, первый канал 14, содержащий группу наиболее важных реагули руемых координат 15, может потребить практически весь расход, создаваемый источником питания, независимо от ст налов управления на входах других координат 15. Если для работы координат 15 канала 14 требуется лишь часть этого расхода, то остающаяся часть может быть израсходована на движение 15 второго канала 14 независимо от сигналов управления на входах последующих каналов 14. Поэтому каждый канал 14 с номером i имеет преимущество перед каналом 14 с номером +1 Б очередности получения энергии от источника питания. Если действительная величина потребляе- мого каналом 14 расхода, информацию о котором несет сигнал датчика 1 расхода, превысит допустимую величину расхода, заданную выходным сигналом третьего сумматора 11, пороговый элемент 3 выДаст команду на переключение уровня ограничения управляемого ограничителя 6 во всех координатах 15 канала 14, Это вызовет ограничение входных сигналов гидроприводов 7 и уменьшение потребляемых расходов, а следовательно, и суммарного расхода потребляемого всеми канала ми 14. Как только сигнал датчика 1 суммарного расхода станет меньше выходного сигнала третьего сумматора 11, восстанавливаются прежние значения сигналов на входах гидроприводов 7. Процесс ограничения входных сигналов гидроприводов 7 и суммарного потребляемого расхода будет продолжаться до тех пор, пока в результате отработки сигналов ошибок координат 15 канала 14 суммарный потребляемый расход не станет и не будет в дальнейшем оставаться меньше допустимой величины. Начиная с этого момента канал 14, следующий за рассмотренньпч выше, получает возможность портеблять расход, превышающий величину, заданную выходным сигналом ее источника 1О эталонного сигнала. Так как ограничение потребляемых расходов на допустимых уровнях происходит во всех подканалах 4, то и вся система также может пот реблять лишь велич1ту расхода, заданную сигналом датчика эталонного сигнала первого канала 14. Таким образом обеспечивается отсутствие перегрузки источника питания и преимущество координат 15, наиболее важных для успешного выполнения работы, перед другими координатами Б очередности получения энергии. Применение изобретения позволит в результате более рационального распредепения между приводами мощности автономного источника питания повысить качество работы системы. По сравнению с прототипом можно в 1,5-2 раза увеличить точность движений и сократить на 20-30% время выполнения .работы манипуляторами за счет эффективной стабилизации платформы и повышения относитель ной энерговооруженности приводов. Формула изобретения Система управления электрогидравли- ческими манипуляторами, содержащая каналы регулирования, состо$пцие из последовательно соединенных датчика суммар i bro расхода, первого сумматора, порогового элемента и по каждой регулируемой координате подсистемы, последовательно соединенные второй сумматор, усилитель, управляемый ограничитель, гидропривод и датчик обратной связи, выход которого подключен ко второму входу второго сумматора, а выход порогового элемента соединен со вторыми входами управляемых ограничителей, отличающая С я тем, что, с целью расширения функшонапьных BoavioKHocTefl системы, она содержит обший сумматор и в каждом канале регулирования поспедовательно соединенные источник эталонного сигнала, . третий сумматор, четвертый сумматор и элемент с односторонней проводимостью, выход третьего сумматора подключен ко второму входу первого сумматора, выход датчика суммарного расхода соединен со вторым входом четвертого сумматора, выход источника эталонного сигнала каждого канала кроме первого, подключен к соответствующему входу общего сумматора, выход которого соединен со вторым входом третьего сумматора первого канала, а выход элемента с односторонней проводимостью каждого канала подключен ко второму входу третьего сумматора последующего канала. Источники инфopмaш и, принятые во внимание при экспертизе 1.Жавнер В, Л., Крамской Э. И. Погрузочные манипуляторы.-Л.: Машинотроение, 1975, с. 26-27. 2.Авторское свидетельство СССР по заявке № 2364258/25-24, 253 13/ОО, 07.05.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU596432A1 |
| Система управления электрогидравлическим манипулятором | 1977 |
|
SU714348A1 |
| Система управления электрогидравлическим манипулятором | 1976 |
|
SU640841A1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМ КОМПЛЕКСОМ | 2016 |
|
RU2615025C1 |
| Система автоматизированного управления строительным комплексом | 2018 |
|
RU2696064C1 |
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Автоматизированная система управления восстановлением объектов инфраструктуры | 2019 |
|
RU2721663C1 |
| Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры | 2019 |
|
RU2733054C1 |
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |