Изобретение относится к области систем автоматического управления плохо формализуемыми объектами с неизвестными параметрами и неизвестным ограниченным внешним возмущением.
Классические подходы к управлению, например, Я.З. Цыпкин. Адаптация и обучение в автоматических системах. М.: Наука, 1968., Н.Г. Загоруйко. Прикладные методы анализа данных и знаний. Новосибирск, ИМ СО РАН, 1999, строятся на том предположении, что можно получить пусть сложную, но точную аналитически заданную форму функциональной зависимости входных и выходных сигналов системы управления с последующим уточнением значений входящих в нее коэффициентов.
Известна, например, самонастраивающаяся система управления, содержащая регулятор, объект управления, выход которого подключен к первому входу измерителя амплитуды и фазы, первый выход которого соединен с первым входом вычислительного блока, выход которого соединен с входом подстройки параметров регулятора, сигнальный вход которого соединен с выходом устройства сравнения, первый вход которого является входом задания системы, сумматор и генератор пробных гармонических колебаний, характеризующаяся тем, что в систему введены блок фазовой подстройки, вход которого соединен со вторым выходом измерителя амплитуды и фазы, заграждающий фильтр и блок вычисления коэффициентов заграждающего фильтра, вход которого соединен с выходом блока фазовой подстройки, подключенным ко второму входу вычислительного блока и к входу генератора пробных гармонических колебаний, выход которого соединен со вторым входом измерителя амплитуды и фазы и с первым входом сумматора, второй вход которого подключен к выходу регулятора, а выход - к входу объекта управления, выход которого соединен с информационным входом заграждающего фильтра, подключенного выходом ко второму входу устройства сравнения, а управляющим входом к выходу блока вычисления коэффициентов заграждающего фильтра, см. патент РФ №2068196. В данном техническом решении регулятор не достигает цели, когда внешние возмущения, действующие на объект, неизвестны.
Известен пропорционально-интегрально-дифференциальный регулятор, содержащий блоки пропорционального, интегрального и дифференциального преобразования, входы которых являются входами регулятора, выходы соединены с входами первого сумматора, отличающийся тем, что, с целью расширения области применения регулятора за счет возможности регулирования объектов с запаздыванием и при наличии запаздывания в цепи обратной связи, в него введены два инвертора, блок интегрирования, блок задержки, второй сумматор, первый вход которого соединен с выходом первого сумматора, выход является выходом регулятора и через последовательно соединенные первый инвертор и блок интегрирования соединен с вторым входом второго сумматора, выход второго блока интегрирования через последовательно соединенные второй инвертор и блок задержки соединен с третьим входом второго сумматора, см. патент РФ №1835215. Этот регулятор не способен работать при неизвестных параметрах объекта.
Известен самонастраивающийся ПИД-регулятор, содержащий ПИД-регулятор, связанный выходом с входом объекта управления и первым входом идентификатора, выход объекта управления соединен со вторым входом идентификатора, выход которого соединен со входом синтезатора, первый выход которого подключен к первому входу ПИД-регулятора, второй вход ПИД-регулятора подключен к выходу сумматора, первый вход которого соединен с выходом объекта управления, второй вход сумматора соединен с выходом генератора испытательного сигнала, отличающийся тем, что введены И-регулятор, блок управления и блок самонастройки амплитуд испытательного сигнала, генератор испытательного сигнала настроен так, чтобы периоды испытательных частот были кратны периоду дискретности, при этом выход ПИД-регулятора соединен с первым входом блока управления, выход которого соединен со входом объекта управления и первым входом идентификатора, второй вход блока управления соединен с выходом И-регулятора, вход которого подключен к выходу сумматора, с третьим входом блока управления соединен второй выход синтезатора, выход объекта управления соединен с четвертым входом блока управления и с входом блока самонастройки амплитуд испытательного сигнала, выход которого соединен со входом генератора испытательного сигнала, см. патент РФ №2419122. В этом регуляторе на постоянную времени и запаздывание накладывается условие, которое в ряде случаев может нарушаться, и тогда регулятор может привести к неустойчивости системы.
Недостатком данных способов управления является то, что они не обеспечивают качественное управление объектами, которые плохо формализуются, свойства которых изменяются в процессе функционирования. В силу недостаточности знаний об объекте и среде, в которой он функционирует, попытки получить точную модель поведения такого объекта не представляются возможными.
Известен способ адаптивного управления по прецедентам, см. Л.Е. Карпов, В.Н. Юдин. Адаптивное управление по прецедентам, основанное на классификации состояний управляемых объектов. Труды Института системного программирования РАН, 2007 г., который позволяет моделировать управление объектами в ситуации, когда известных параметров объекта управления и окружающей среды недостаточно для однозначного определения поведения этого объекта и управление необходимо осуществлять не по параметрам объекта, а по его состоянию, которое более полно определяет тенденцию его дальнейшего поведения. Данный способ, включающий определение адаптивного регулятора, обеспечивающего достижение цели за конечное число управляющих воздействий, предполагает формирование на основе априорной информации обобщенных или агрегатированных образов - классов состояний объекта управления с известной реакцией объекта каждого класса.
Недостатком данного способа адаптивного управления, принятого авторами за прототип, является то, что для подавляющего числа однотипных технологических объектов управления, параметры которых и реакция на внешние воздействия отличаются у различных образцов, он связан с большими техническими сложностями, делающими такое управление такими плохо формализуемыми объектами экономически и технически нецелесообразным, так как использование данных прецедентов, полученных на одних объектах, не позволяет оптимизировать регулирование на других.
Решаемая заявленным изобретением техническая задача заключается в создании экономически и технически эффективного способа управления технологическими объектами, которые плохо формализуются, к которым неприменимы все известные способы управления, и предназначенного для использования в качестве адаптивного алгоритма работы программно-технических средств автоматического управления (контроллеры, регуляторы и т.п.) различными технологическими объектами.
Согласно изобретению способ адаптивного управления плохо формализуемым объектом, включающий определение адаптивного регулятора, обеспечивающего достижение цели за конечное число управляющих воздействий, характеризуется тем, что вначале осуществляют тестовые пуски объекта управления при разных управляющих воздействиях и постоянном внешнем воздействии, причем предусматривают исключение возможности превышения параметрами объекта заранее известных предельно допустимых значений, при этом в процессе тестовых пусков фиксируют значения управляющих воздействий и получаемые при этом значения регулируемого параметра после достижения им установившегося значения и устанавливают зависимость у=f(х, 1/z), где y - регулируемый параметр, x - регулирующий параметр, z - внешнее воздействие, после чего осуществляют пуск объекта и устанавливают предварительное значение регулирующего параметра xn1 по формуле xn1=xi-1+αi(yn-yi-1), где αi - тангенс угла наклона отрезков зависимости у=f(x, 1/z), соединяющих соседние точки, полученные в результате тестовых пусков, относительно оси абсцисс, i - порядковый номер тестового пуска, затем устанавливают значение регулирующего параметра x=xn1, и после достижения регулируемым параметром установившегося значения yn1 это значение сравнивается с заданным - yn, при этом при выполнении условия yn-yn1=Δyn1≤(±δ), где δ - зона нечувствительности регулятора, задаваемая в базе данных устройства, величина регулирующего воздействия сохраняется: x=xn1, а при выполнении условия yn-yn1=Δyn1>δ устанавливают значение регулирующего параметра x=xn2 по формуле xn2=xi-1+αi(yn+Δyn1-yi-1), и после достижения регулируемым параметром установившегося значения yn2 это значение сравнивается с заданным - yn, при этом эти действия повторяют до достижения условия (yn-yn1=Δyn1≤(±δ), после чего вышеуказанные процедуры повторяют для других значений регулируемого параметра в процессе работы объекта управления и определяют зависимость у=f(x, 1/z) при z=const во всем диапазоне регулирования.
Технический результат, достигаемый в результате реализации заявленной совокупности существенных признаков заявленного технического решения, заключается в том, что заявленные процедуры позволяют при сравнительно небольшом количестве тестовых пусков установить зависимость изменений регулируемых параметров объекта при изменениях регулирующих параметров при постоянных внешних воздействиях во всем диапазоне регулирования с необходимой точностью.
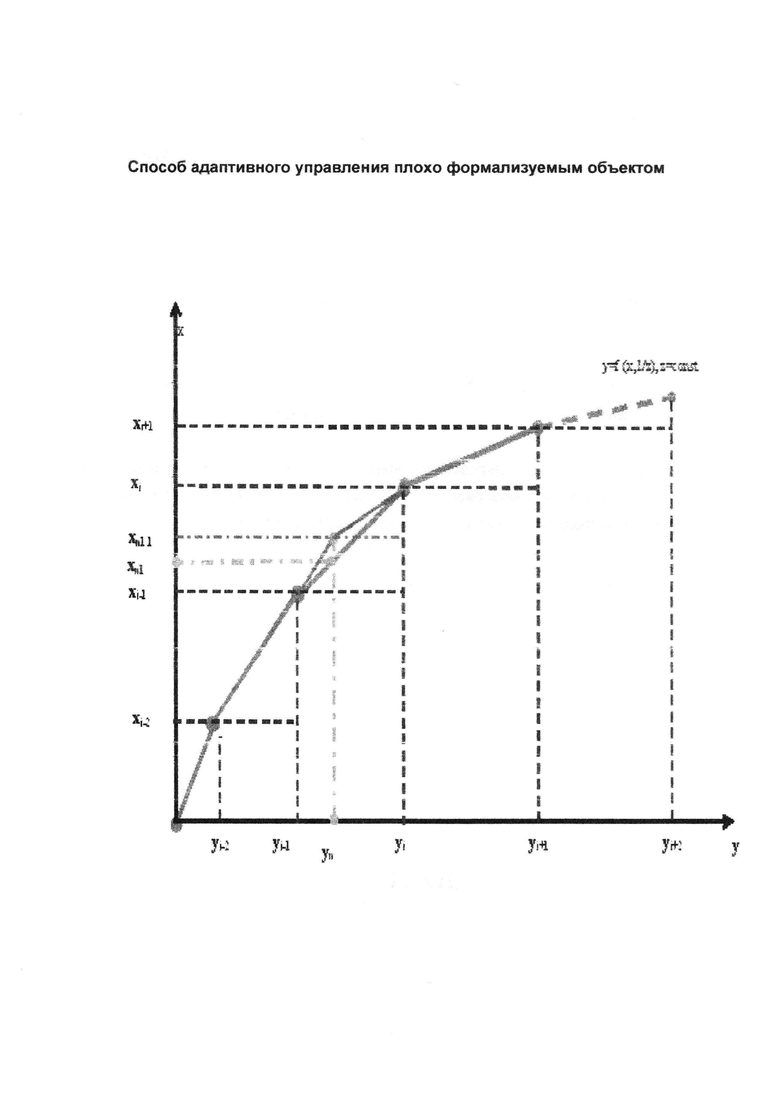
Сущность изобретения поясняется чертежом, на котором приведена зависимость у=f(х, 1/z) при z=zc=const.
Заявленный способ осуществляют следующим образом.
Вначале осуществляют тестовые пуски объекта управления при разных управляющих воздействиях и постоянном внешнем воздействии, причем предусматривают исключение возможности превышения параметрами объекта заранее известных предельно допустимых значений. В процессе тестовых пусков фиксируют значения управляющих воздействий и получаемые при этом значения регулируемого параметра после достижения им установившегося значения. Принимая допущение, что зависимость параметра от регулирующего воздействия между тестовыми точками линейна, выстраиваем эту зависимость во всем диапазоне регулирования.

где y - регулируемый параметр,
х - регулирующий параметр,
z - внешнее воздействие.
Определяют коэффициенты α, представляющие собой по существу тангенс угла наклона отрезков прямой, соединяющей соседние точки, полученные в результате тестовых пусков, относительно оси абсцисс, по формуле 2:

где: α - коэффициент - тангенс угла наклона отрезков прямой, соединяющей соседние точки полученные в результате тестовых пусков, относительно оси абсцисс;
у - регулируемый параметр;
х - регулирующий параметр;
i - в этой и последующих формулах - порядковый номер тестового пуска.
После вычисления коэффициентов α осуществляют пуск объекта. При необходимости установить значение регулируемого параметра у=yn, при этом yi-1<yn<yi, определяют предварительное значение регулирующего параметра xn1 по формуле (3):

Устанавливают значение регулирующего параметра х=xn1, и после достижения регулируемым параметром установившегося значения yn1 это значение сравнивают с заданным yn.
Если:

где δ - зона нечувствительности регулятора, задаваемая в базе данных устройства, то величину регулирующего воздействия сохраняют х=xn1.
Если yn-yn1=Δyn1>δ, то определяют новое значение xn2 по формуле (5):

Устанавливается значение регулирующего параметра х=xn2, и после достижения регулируемым параметром установившегося значения yn2 это значение сравнивают с заданным - yn.
Вышеуказанные действия повторяют до достижения условия (4). Примем, что количество итераций которые необходимо сделать для выполнения условия (4), - k, т.е. это условие выполнится при х=xnk. Таким образом, можно получить реальную точку с координатами х=xnk и у=yn. Примем, что зависимость у=f (х, 1/z) на участках между точками с координатами (у2; x2)-(yn; xnk)-(у3; х3) также линейна, и определяем по формуле (2) коэффициенты α2n и αn3 для полученной точки.
В дальнейшем при необходимости установить значение регулируемой величины у в диапазонах yi-1≤у≤yn и yn≤у≤yi определение значение регулирующего параметра х осуществляется по формуле (4) с использованием коэффициентов α2n и αn3 соответственно.
Если yn-yn1=Δyn1>(-δ), то величина xn2 вычисляется по формуле (6):

Указанные процедуры повторяют для других значений регулируемой величины в процессе работы объекта управления. Полученные координаты точек фиксируются и запоминаются устройством автоматического управления (регулятором). В результате чего создается таблица зависимости (1) при z=zc=const во всем диапазоне регулирования. Практика показывает, что для большинства объектов управления таких точек требуется не более 10÷12 для линейной аппроксимации зависимости (1) с необходимой точностью.
Необходимо установить значение регулируемой величины у=yn, при этом величина внешнего воздействия z=zr≠zc.
В этом случае величина управляющего воздействия в первом приближении определяется по формуле (7).

где: zr - величина внешнего воздействия.
Заявленный способ реализуем с использованием известных технических и технологических средств и позволяет обеспечить управления технологическими объектами, которые плохо формализуются, к которым неприменимы все известные способы управления. Заявленный способ может быть использован в качестве адаптивного алгоритма работы программно-технических средств автоматического управления (контроллеры, регуляторы и т.п.) различными технологическими объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОЙ РЕКУРСИВНОЙ ПОЛОСОВОЙ ФИЛЬТРАЦИИ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2014 |
|
RU2579982C2 |
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2000 |
|
RU2166788C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЕМКОСТНЫМИ СОСТАВЛЯЮЩИМИ ОБЪЕКТА | 2009 |
|
RU2442206C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛИСОСТАВА ГАЗОВЫХ СРЕД | 2011 |
|
RU2504760C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ АПЕРИОДИЧЕСКИХ ЗВЕНЬЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2110828C1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2001 |
|
RU2211470C2 |
| СПОСОБ НАСТРОЙКИ ПАРАМЕТРОВ РЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498495C1 |
Изобретение относится к способу адаптивного управления плохо формализуемым объектом. Для управления плохо формализуемым объектом определяют адаптивный регулятор для достижения цели за конечное число управляющих воздействий, осуществляют вначале тестовые пуски объекта управления при разных управляющих и постоянном внешнем воздействии, предусматривают исключение возможности превышения заранее известных предельно допустимых значений, осуществляют пуск объекта, после достижения регулируемым параметром установившегося значения сравнивают его с заданным определенным образом. Повторяют действия для других значений регулируемого параметра в процессе работы объекта управления во всем диапазоне регулирования. Обеспечивается точность регулирования при сравнительно небольшом количестве тестовых пусков. 1 з.п. ф-лы, 1 ил. 
1. Способ адаптивного управления плохо формализуемым объектом, включающий определение адаптивного регулятора, обеспечивающего достижение цели за конечное число управляющих воздействий, отличающийся тем, что вначале осуществляют тестовые пуски объекта управления при разных управляющих воздействиях и постоянном внешнем воздействии, причем предусматривают исключение возможности превышения параметрами объекта заранее известных предельно допустимых значений, при этом в процессе тестовых пусков фиксируют значения управляющих воздействий и получаемые при этом значения регулируемого параметра после достижения им установившегося значения и устанавливают зависимость у=f(x, 1/z), где у - регулируемый параметр, x - регулирующий параметр, z - внешнее воздействие, после чего осуществляют пуск объекта и устанавливают предварительное значение регулирующего параметра xn1 по формуле xn1=xi-1+αi (yn-yi-1), где αi - тангенс угла наклона отрезков зависимости y=f(x, 1/z), соединяющих соседние точки, полученные в результате тестовых пусков, относительно оси абсцисс, i - порядковый номер тестового пуска, затем устанавливают значение регулирующего параметра x=xn1, и после достижения регулируемым параметром установившегося значения yn1 это значение сравнивается с заданным - yn, при этом при выполнении условия yn-yn1=Δyn1≤(±δ), где δ - зона нечувствительности регулятора, задаваемая в базе данных устройства, величина регулирующего воздействия сохраняется: x=xn1, а при выполнении условия yn-yn1=Δyn1>δ устанавливают значение регулирующего параметра x=xn2 по формуле xn2=xi-1+αi(yn+Δyn1-yi-1), и после достижения регулируемым параметром установившегося значения yn2 это значение сравнивается с заданным - yn, при этом эти действия повторяют до достижения условия (yn-yn1=Δyn1≤(±δ), после чего вышеуказанные процедуры повторяют для других значений регулируемого параметра в процессе работы объекта управления и определяют зависимость y=f(x, 1/z) при z=zc=const во всем диапазоне регулирования.
2. Способ по п. 1, отличающийся тем, что при величине внешнего воздействия zr≠zc величина управляющего воздействия в первом приближении определяется по формуле xn1=[xi-1+αi×(yn-yi-1)]×zr/zc.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| RU 2014121436 A, 10.12.2015 | |||
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| US 7418432 B2, 26.08.2008 | |||
| Адаптивная система управления нестационарным линейным объектом | 1984 |
|
SU1277067A1 |

