Изобретение относится к самонастраивающимся системам управления в гидроавтоматике и может использоваться в сейсмотехнике, в летательных аппаратах, в станках и в спецавтотранспорте.
Известна электрогидравлическая следящая система [1], в которой сигнал осцилляции (рабочий жаргон - «подзуд», похож на высокочастотный сигнал подмагничивания в аналоговых магнитофонах при записи на магнитную пленку) используется только для компенсации характерной для гидравлики зоны нечувствительности. Основной причиной этой нечувствительности являются процессы слипания частиц гидравлической жидкости. Предлагаемая в качестве основной новизны управляемая периодическая потеря устойчивости работающей системы не может обеспечить надежную непрерывную адаптацию системы к изменениям параметров объекта управления и окружающей среды.
Данный недостаток устраняется в известной самонастраивающейся системе [2], которая содержит настраиваемый ПИД-регулятор, выход которого через сумматор соединен со входом объекта управления, выход которого подключен к одному из входов заграждающего фильтра, выход которого через устройство сравнения подключен к первому входу регулятора и к одному из входов измерителя амплитуды и фазы, первый выход которого соединен со входом блока фазовой подстройки частоты, выход которого соединен соответственно со входом блока вычисления коэффициентов заграждающего фильтра, выход которого подключен ко второму входу заграждающего фильтра, с одним из входов вычислительного блока и со входом генератора пробных гармонических колебаний, выход которого соединен со вторым входом сумматора и со вторым входом измерителя амплитуды и фазы, второй выход которого соединен со вторым входом вычислительного блока, выход которого подключен ко второму входу ПИД-регулятора.
Эта система не достигает цели, если внешние действующие на объект возмущения неизвестны, как это доказано в [3].
Наиболее близкой к предлагаемой является частотная адаптивная система управления [3], которая содержит настраиваемый регулятор, соединенный со входом объекта управления, выход объекта управления соединен с входом идентификатора, чей выход соединен с синтезатором, выход которого соединен с регулятором, на другой вход регулятора через сумматор поступают выход объекта и выход генератора испытательного сигнала, чей вход соединен с выходом блока настройки.
Недостатком этой системы является ее сложность из-за наличия трех обратных связей, в двух из которых используются сложные алгоритмы обработки сигналов.
Задачей изобретения является упрощение системы и повышение ее надежности за счет перестройки характеристик корректирующих звеньев, определяющих коэффициенты регулятора.
Технический результат достигается тем, что адаптивная электрогидравлическая следящая система с модулированной осцилляцией, содержащая соединенные последовательно сумматор, настраиваемый регулятор, соединенный со входом объекта управления, содержит модулятор, демодулятор, генератор осцилляции, клеточный автомат, при этом выход объекта управления соединен со вторым входом сумматора и с первым входом демодулятора, выход которого соединен со вторым входом настраиваемого регулятора, выходы генератора осцилляции и клеточного автомата соединены, соответственно, с первым и вторым входом модулятора, выход которого соединен, соответственно, с третьим входом сумматора и со вторым входом демодулятора.
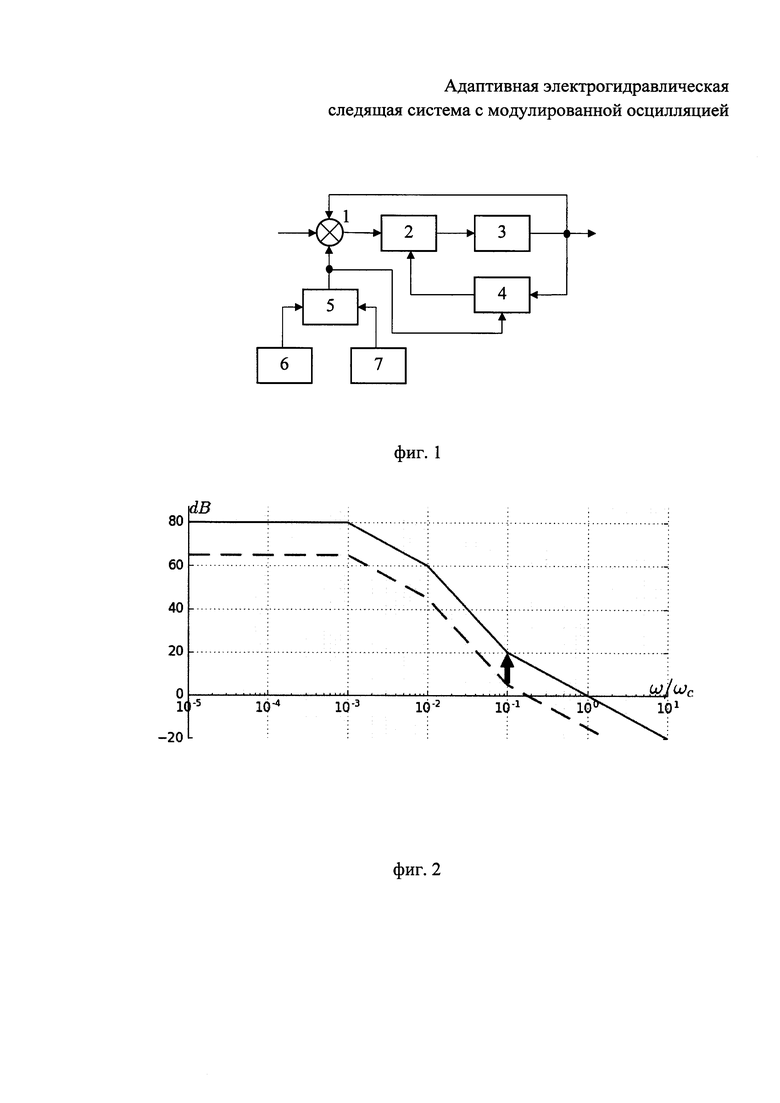
Предлагаемая система, показанная на фиг. 1, где изображена ее структурная схема, содержит сумматор 1, настраиваемый регулятор 2, соединенный со входом объекта управления 3, выход объекта управления 3 соединен с первым входом демодулятора 4, выход которого соединен с управляющим входом настраиваемого регулятора 2, на второй вход демодулятора 4 через модулятор 5 поступает произведение сигналов с выхода генератора осцилляции бис выхода клеточного автомата 7.
Система работает следующим образом.
Генератор осцилляции 6 формирует синусоидальный сигнал, клеточный автомат 7 - псевдослучайную последовательность, в результате взаимодействия этих сигналов в модуляторе 5 образуется модулированная по фазе осцилляция. Эта модулированная осцилляция, пройдя через сумматор 1 и настраиваемый регулятор 2 в объект управления 3, устраняет в последнем зону нечувствительности, присущую всем гидравлическим устройствам.
Амплитуда модулированной осцилляции, поступающей с выхода объекта управления 3 на первый вход демодулятора 4, несет в себе информацию о действующем коэффициенте усиления разомкнутой системы на частоте осцилляции, и соответственно об устойчивости системы.
Демодулятор 4, на первый вход которого подается модулированная осцилляция с выхода объекта управления 3, а на второй вход модулированная осцилляция с выхода модулятора 5, формирует из этих двух сигналов управляющий сигнал на управляющий вход настраиваемого регулятора 2, изменяя его усиление, как показано на фиг. 2, где изображена логарифмическая амплитудно-частотная характеристика разомкнутой системы и ее подстройка при дрейфе коэффициента усиления.
Амплитуда и частота фазоманипулированного сигнала осцилляции выбираются как для обычного сигнала осцилляции, т.е. соответственно примерно 0,01 от максимального сигнала управления и с частотой примерно 100 Гц. Основные свойства сигнала на базе псевдослучайной последовательности даны в [4] и формирование самой последовательности клеточным автоматом в [5].
При изготовлении системы ее частотные характеристики устанавливают нерегулируемыми корректирующими звеньями с учетом возможностей, приведенных в [6], чтобы получить высокое быстродействие работы объекта управления при небольшом запасе устойчивости с расчетом на компенсацию дрейфа коэффициента усиления.
Система, описанная в прототипе, сложна сама и состоит из сложных узлов. Это видно из описания изобретения прототипа. В предлагаемой системе в отличие от прототипа отсутствуют следующие блоки: идентификатор, синтезатор, генератор испытательного сигнала и блок настройки. В этих блоках идет обработка нескольких параметров по нелинейным алгоритмам. Результатом работы этих блоков является перестройка характеристик корректирующих звеньев, определяющих коэффициенты регулятора. В результате этой перестройки частотные характеристики системы приближаются к оптимальным. Настраиваемый регулятор в системе прототипа предназначен для изменения в нем в процессе адаптации нескольких параметров. В предлагаемой же системе предусмотрено изменение только одного самого простого параметра - коэффициента усиления.
В предлагаемой системе фазоманипулированный сигнал осцилляции выполняет несколько функций. Во-первых, он устраняет зону нечувствительности гидравлического объекта управления. Будучи модулированным по фазе псевдослучайной последовательностью сигнал осцилляции имеет шумоподобный характер. Благодаря этому он лучше подавляет процессы слипания частиц гидравлической жидкости, чем обычная стационарная синусоидальная осцилляция.
Во-вторых, этот сигнал позволяет измерить коэффициент усиления разомкнутой системы управления на требуемой частоте. После демодуляции сигнал управляет коэффициентом усиления, компенсируя его дрейф.
Если амплитудно-частотная характеристика системы, показанная на фиг. 2 штриховой линией, пересечет ось X, то произойдет самовозбуждение системы. Это же может произойти, если будет подаваться сигнал осцилляции без изменения фазы. В предлагаемой системе фаза сигнала осцилляции меняется в соответствии со значениями М-последовательности на 180°, что не дает системе войти в режим самовозбуждения. Это обеспечивает устойчивость системы.
В аналоге [2] подавление влияния испытательного сигнала на устойчивость системы обеспечивается путем частотного разделения каналов регулирования и самонастройки. Это достигается включением в контур главной обратной связи системы заграждающего фильтра, настроенного с помощью блока фазовой автоподстройки частоты на частоту критических колебаний объекта. В прототипе [3] это достигается благодаря малой амплитуде испытательного сигнала - «компонента выхода объекта, вызванная этим сигналом, меньше компоненты, зависящей от внешнего возмущения».
В заявляемой системе устойчивость обуславливают два фактора: фазовая модуляция испытательного сигнала и кодовый модулирующий сигнал, имеющий корреляционную функцию, исключительно близкую к дельта-функции.
Частотная адаптивная система управления, взятая за прототип, является универсальной для многих объектов управления и оптимизирована для повышения быстродействия и точности их работы, но в некоторых применениях важнее оказывается надежность и простота.
Так, например, в работе возимых электрогидравлических сейсмических вибраторов свойства объектов управления существенно изменяются при переезде на новую «физическую точку» воздействия. Это обусловлено тем, что контакты их излучающих сигналы плит с грунтом имеют различную конфигурацию и плотность на каждой новой точке. Переезды на новые точки происходят обычно через несколько минут, а само воздействие продолжается примерно 10 секунд и повторяется 5 раз.
Если потратить восьмую часть первого воздействия на адаптацию к изменению нагрузки объекта управления, то оставшиеся 97,5% энергии 5 воздействий будет излучаться оптимизированным вибратором. При частоте смены символов 100 Гц и продолжительности адаптации примерно одну восьмую секунды количество символов М-последовательности составляет 127. Это означает превышение пика корреляционной функции, т.е. полезного сигнала на выходе демодулятора, в 127 раз над уровнем сигнала на входе демодулятора.
Так как корреляционная функция повторяющейся М-последовательности не имеет собственных боковых всплесков [4, С. 80, рис. 2.5.4], то в выходном сигнале демодулятора полезный сигнал еще более четко выделяется на фоне всех остальных рабочих сигналов и помех. Поэтому точность управления коэффициентом усиления будет выше, чем в прототипе, что повышает надежность заявляемой системы.
Источники информации
1. АС СССР №903586 М. Кл. F15B 9/03 / Электрогидравлическая следящая система // Г.С. Остапенко и А.С. Щеголеватых - Опубл. 07.02.1982. БИ №2.
2. Патент РФ №2068196 МПК G05B 13/02 / Самонастраивающаяся система управления // В.М. Мазуров. - Опубл. 1996.
3. Патент РФ №2413270 С2 МПК G05B 13/02 / Частотная адаптивная система управления // А.Г. Александров, - Опубл. 2011.
4. Шумоподобные сигналы в системах передачи информации под ред. Пестрякова В.Б. М.: «Сов. Радио», 1973, 424 с.
5. И.А. Мурашко, Д.Е. Храбров. Методика проектирования генератора псевдослучайных тестовых последовательностей на клеточных автоматах с расширенным набором правил. Вестник московского государственного университета приборостроения и информатики, 2013, №47 - С. 78-93.
6. В.В. Солодовников. Синтез корректирующих устройств следящих систем при помощи оптимальных и типовых логарифмических частотных характеристик. Автомат и телемех., 1953, том 14, выпуск 5, 531-555.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения гидронажимного механизма прокатной клети | 1987 |
|
SU1412934A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| СПОСОБ И СИСТЕМА РАДИОСВЯЗИ | 2017 |
|
RU2682715C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА РАДИОСВЯЗИ С ПОВТОРНЫМ ИСПОЛЬЗОВАНИЕМ ЧАСТОТЫ | 1996 |
|
RU2115243C1 |
| УСТРОЙСТВО ПРИЕМА И ПЕРЕДАЧИ OFDM-СИГНАЛОВ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 2010 |
|
RU2423002C1 |
| Устройство для преобразования сигналов | 1984 |
|
SU1234991A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| СПОСОБ И УСТРОЙСТВО ВЫСОКОСКОРОСТНОЙ И НИЗКОСКОРОСТНОЙ СВЯЗИ ЧЕРЕЗ СПУТНИКИ НА НИЗКИХ И СРЕДНИХ ОРБИТАХ | 1997 |
|
RU2133555C1 |
Адаптивная электрогидравлическая следящая система с модулированной осцилляцией содержит сумматор, настраиваемый регулятор, модулятор, демодулятор, генератор осцилляции, клеточный автомат, объект управления, соединенные определенным образом. Обеспечивается упрощение системы и повышение ее надежности. 2 ил.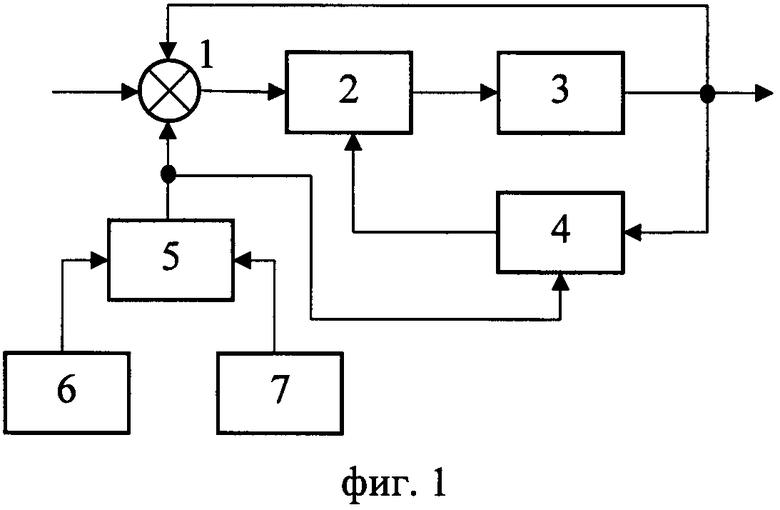
Адаптивная электрогидравлическая следящая система с модулированной осцилляцией, содержащая соединенные последовательно сумматор, настраиваемый регулятор, соединенный со входом объекта управления, отличающаяся тем, что содержит модулятор, демодулятор, генератор осцилляции, клеточный автомат, при этом выход объекта управления соединен со вторым входом сумматора и с первым входом демодулятора, выход которого соединен со вторым входом настраиваемого регулятора, выходы генератора осцилляции и клеточного автомата соединены, соответственно, с первым и вторым входом модулятора, выход которого соединен, соответственно, с третьим входом сумматора и со вторым входом демодулятора.
| ЧАСТОТНАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2413270C2 |
| Цифровая гидравлическая следящая система | 1986 |
|
SU1477953A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Система управления с переменной структурой | 1976 |
|
SU613289A1 |
| CN 103984234,A, 13.08.2014. | |||

