Область изобретения
Настоящее изобретение относится к способу изготовления микромеханических и наномеханических деталей.
Настоящее изобретение также относится к деталям, изготовленным в соответствии с этим способом и предназначенным для использования в области производства настенных/наручных часов или вне этой области, например, в области измерительных инструментов, оптических устройств, оптоэлектроники или в других областях, требующих высокой точности обработки, за исключением абляции биологических материалов.
Настоящее изобретение также относится к способам изготовления элементов передачи, таких как приводные ремни, шкивы, зубчатые передачи и т.п., особенно для нужд производства настенных/наручных часов.
Уровень техники
Международная заявка WO 04006026 описывает механизм хода настенных/наручных часов, в котором используются шкивы и приводные ремни как элементы передачи. Механизм хода часов, который обеспечивается зубчатыми передачами или другими типами синхронной или асинхронной передачи, хорошо известен из уровня техники. Однако существует постоянная необходимость миниатюризации компонентов таких механизмов хода.
Изготовление таких различных элементов передачи подвергается строгим ограничениям, связанным с их размерами и материалами, которые необходимо использовать. Требования, которые касаются геометрии и точности, являются строгими. Таким образом, изготовление гибких механических элементов передачи, например, приводных ремней, или механических элементов, гибких или жестких, которые часто имеют малый размер и производятся из неметаллических, полимерных, органических или композитных материалов, вызывает значительные трудности. Размеры элементов часто составляют менее 2 мм, и шаг зубчатого зацепления - менее 2 мм, даже порядка сотых миллиметра.
Квалифицированный специалист в данной области техники сталкивается со следующими проблемами:
- трудности в обработке и управлении процессом обработки,
- слабо контролируемое поведение материалов (физико-химические свойства),
- неподходящее моделирование и последующее воспроизведение сложных, в особенности искривленных, поверхностей,
- трудности при использовании многослойных или композитных материалов,
- трудности при введении определения функциональных форм, например зубчатого зацепления,
- недостаточное увеличение силы тяги или покрытие с низким коэффициентом трения в случае приводных ремней.
Таким образом, предшествующий уровень техники показывает, что существует необходимость создания новых способов производства микро- и наномеханических компонентов, которые позволяют проводить обработку на размерной шкале (с разрешением), изменяющейся от миллиметра (10-3 м) до нанометра (10-9 м). Преимущественно, этот способ должен быть адаптирован ко всем материалам без ограничений или, в любом случае, к широким классам материалов. Обработка должна быть основана на геометрическом описании микро- и наномеханических компонентов, которые обрабатываются, например элементов передачи.
Также существует необходимость создания новых частей или элементов, например, новых шкивов и приводных ремней с уменьшенными размерами и различными производственными допусками, которые не могут быть получены с помощью традиционных способов производства, и которые, таким образом, нельзя было представить себе раньше.
Способы обработки деталей с использованием мощного лазера известны из предшествующего уровня техники. Таким образом, использование лазерных диодов на иттрий-алюминиевом гранате (YAG) или диоксиде углерода (CO2), которые дают непрерывное излучение или «длинные» импульсы (свыше 500 фемтосекунд), является относительно стандартным при обработке таких материалов, как металлы, также стандартным является и использование эксимерного лазера для полимеров. Эти способы ограничиваются при работе с малыми размерами или с материалами, которые не могут противостоять ударным или тепловым нагрузкам. Действительно, наблюдалось, что теплопередача в веществе на протяжении импульсов или даже непрерывного излучения ограничивает точность зоны абляции. Кроме того, зона абляции обычных лазеров соответствует цилиндрической форме пучка, что ограничивает формы, которые могут обрабатываться. Глубина обработки зависит от мощности пучка и от свойств материала; это трудно контролировать.
Цели изобретения
Способ изобретения основан на обработке элементов малых размеров за счет абляции вещества с помощью импульсных лазеров с ультракороткими импульсами. В частности, изобретение основано на абляции с помощью лазерных импульсов, имеющих длительность менее пятисот фемтосекунд (5·10-13 сек) и мощность более 1012 ватт на поверхности взаимодействия пучок/материал. Такие импульсы генерируются конкретными лазерами, называемыми здесь далее фемтолазерами.
Фемтолазеры известны как таковые, и их технология постоянно совершенствуется, поэтому эти устройства являются компактными, многофункциональными и надежными. Многообразие таких лазеров непрерывно увеличивается: на сегодня пучки охватывают весь электромагнитный спектр от рентгеновских лучей до Т-лучей (излучения с частотой порядка тераГерц, за диапазоном инфракрасного излучения), а максимальная мощность достигает нескольких петаватт (нескольких биллионов мегаватт). В особенности, такие устройства используются в физике, химии, биологии, медицине, оптике.
Из-за экстремально короткой длительности импульсов они делают возможным изучение ультрабыстрых явлений, происходящих на микроскопическом и атомном уровне. Кроме того, очень высокие мощности могут быть получены на протяжении короткой длительности импульса, что создает экстремальные условия, часто сравнимые с теми, которые возникают в ядерных реакторах.
Использование импульсного лазера с ультракороткими импульсами для обработки микромеханических элементов дает следующие преимущества:
- точность обработки,
- абляция материала в практически нетепловых (термонейтральных) условиях,
- существует эффект только в фокальной точке «перетяжки пучка», пучок может, особенно в случае прозрачных материалов, проходить через толщину слоя для того, чтобы работать в точке внутри, без изменения по отношению к поверхности или веществу на пути прохождения,
- пучком можно управлять на расстоянии и под всеми углами,
- не существует ограничений по отношению к обрабатываемым материалам,
- возможно достичь большего разрешения, чем ширина лазерного пучка, за счет юстировки лазера таким образом, что только интенсивность центральной части, в которой сконцентрирована наибольшая мощность, оказывается больше, чем абляционный порог материала (регулирующий плотность энергии в фокальной плоскости),
- не требуется усилий при обработке, поскольку затрагивается аспект абляции.
Использование фемтолазеров для абляции вещества как таковое известно и описано в статьях Kautek et al., «Femtosecond pulse laser ablation of metallic, semiconducting, ceramic, and biological materials», SPIE vol.2207, pp.600-511, Apr. 1994 и Liu., X. et al., «Laser Ablation and Micromachining with Electronics, vol.33, №10, pp.1706-1716.
Патент США USRE37585 описывает способ разрушения вещества с помощью импульсного лазерного пучка, характеризуемый отношением порога пробоя потока импульсного излучения (Fth) к ширине лазерного пучка (Т), которое показывает резкий, быстрый и четкий изгиб или, по меньшей мере, четко обнаруживаемый и четкий изгиб, или градиент предварительно заданной величины ширины лазерного пучка.
Согласно первому аспекту изобретения предусматривается способ изготовления микромеханического или наномеханического компонента в виде приводного ремня или микроформы приводного ремня часов, включающий лазерную абляцию указанного приводного ремня или микроформы, указанного приводного ремня, с импульсами длительностью менее 5×10-13 секунд и с мощностью более 1012 ватт.
При этом согласно указанному способу лазерной абляцией воздействуют на компонент с, по меньшей мере, одним размером меньшим или равным двум миллиметрам или предпочтительно меньшим, чем 0,5 миллиметра, который определяют как длину сегмента, соединяющего две наиболее удаленные точки компонента вдоль одного и того же направления.
Кроме того, в указанном способе указанный компонент содержит зубцы, глубина которых составляет менее двух миллиметров.
Согласно первому аспекту изобретения в способе перед лазерной абляцией компонента дополнительно включает следующие этапы: описание форм, подлежащих обработке, передачу данных, соответствующих указанному описанию, на программное обеспечение обработки, причем указанное программное обеспечение обработки предпочтительно особо принимает во внимание интерполяции криволинейных поверхностей, определение угла падения пучка и положения обрабатываемого компонента по отношению к лазерному пучку, в соответствии с материалом и глубиной обработки, таким образом, чтобы оптимизировать условия абляции, введение данных в информационный процессор (17) контроля и/или управления перемещением, юстировку лазера с ультракороткими импульсами, имеющими длительность менее 5×10-13 секунд и мощность более чем 1012 Ватт, и начало программы обработки.
При этом в указанном способе градиент энергии лазерного пучка определяют с обеспечением интенсивности центральной зоны, сечение которой составляет менее 50% полного сечения пучка, больше, чем абляционный порог материала, и абляцию осуществляют только в фокальной плоскости лазерного пучка, при этом осуществляют этап перемещения указанной фокальной плоскости относительно указанного компонента в направлении, перпендикулярном указанному лазерному пучку.
При этом в указанном способе энергию и длительность импульсов выбирают в зависимости от материала компонента для обеспечения абляции нескольких мкм, предпочтительно менее чем 10 мкм, на импульс, и для лазерного пучка используют дифракционное устройство.
Кроме того, согласно указанному способу описание обрабатываемых форм осуществляют на основе геометрии, определяемой на плане системы автоматизированного проектирования (САПР) в трехмерных координатах, причем обработку шага определяют в соответствии с материалом и глубиной обработки так, чтобы можно было оптимизировать условия абляции, причем фокальную область располагают в зависимости от освещения с помощью оптической головки (15) или оптической головки (15), оборудованной дифракционным устройством.
Согласно второму аспекту изобретения предусмотрен приводной ремень, предназначенный для изготовления часов, имеющий зубцы, расположенные в пространстве в соответствии с шагом менее чем два миллиметра, и/или глубина которых составляет менее двух миллиметров, и выполненный в соответствии со способом по первому аспекту изобретения.
Кроме того, приводной ремень имеет криволинейный зубчатый профиль в виде, по меньшей мере, одной кривой, по меньшей мере, с одним радиусом, большим 10-9 м и меньшим, чем 5 мм.
Способ настоящего изобретения является особенно преимущественным благодаря использованию импульсов очень короткой длительности и очень высоких мощностей. Эти экстремальные условия позволяют осуществлять точную обработку сильно изменяемых материалов с помощью одного и того же оборудования. Однако мощность и длительность импульсов могут быть адаптированы к материалу или к скорости и точности, которые требуются для обработки части компонента.
Таким образом, изобретение в особенности также базируется на наблюдении, показывающем, что использование экстремально высоких мощностей, намного больших, чем мощности, используемые в традиционных лазерных способах обработки, позволяет получить почти мгновенную взрывную сублимацию зоны, освещаемой лазерным пучком. Несмотря на малый размер этой зоны, обработка является соответственно относительно быстрой. Кроме того, за счет прерывания светового импульса после очень короткого времени, абляция ограничивается непосредственно освещаемой зоной, без затрагивания прилегающих частей. Таким образом, значительные используемые мощности позволяют получать исключительно четкий срез с резкими краями тех частей, которые обрабатываются.
Изобретение также основано на наблюдении, показывающем, что фемтолазер применяется для обработки новых типов компонентов и материалов, в особенности, компонентов малых размеров и высокой точности, в особенности, часовых элементов, для которых использование фемтолазера ранее не предусматривалось. Также изобретение относится к таким элементам, изготавливаемым с помощью фемтолазера, и, таким образом, имеющим размеры, точность и состояния поверхности ранее считавшиеся практически недостижимыми.
Таким образом, способ изобретения делает возможным обработку компонентов, имеющих размер, равный или меньше, чем 2 мм или, предпочтительно, менее одного миллиметра, причем этот размер пересчитывается и определяется как длина сегмента, который соединяет две наиболее удаленные точки компонента элемента вдоль одного и того же направления. Способ также может делать возможным обработку компонентов, имеющих зубцы, глубина которых меньше двух миллиметров или даже меньше, чем 0,5 миллиметра.
Компонент предпочтительно удерживается микроманипулятором, обеспечивающим расположение и ориентацию обрабатываемой поверхности по отношению к ориентации лазерного пучка. Компонент, который обрабатывается, может удерживаться многоосевой системой, управляемой микрометрической или даже нанометрический программой обработки для робота с компенсацией свободного хода или модификацией. Перемещение компонента, малое и очень слабое, в основном может осуществляться намного быстрее и с большей точностью и воспроизводимостью, чем перемещение лазера или связанной с ним оптической системы. Однако также возможно перемещать лазер или отклонять пучок одновременно или даже однозначно.
Таким образом, зона абляции может быть модифицирована за счет перемещения обрабатываемого компонента, по меньшей мере, в одной плоскости (оси Х и Y), за счет вращений в этой плоскости вдоль оси С, и предпочтительно также за счет перемещений вдоль оси Z, перпендикулярной к плоскости, и/или вращений вдоль двух перпендикулярных осей А и В. Как показано, смещения лазера или связанной с ним оптической системы, также могут рассматриваться. Кроме того, фокусное расстояние также может регулироваться в соответствии с направлением, параллельным оси Z.
Смещения регулируются с помощью программы обработки, которая принимает данные, соответствующие описанию формы, которая обрабатывается. Описание дается в математической форме, и программа обработки определяет траектории, по которым должен проходить лазерный пучок, непрерывно или пошагово, для получения этих форм. Изобретение основано на геометрическом описании, использующем новые семейства кривых и принимающем во внимание возможности фемтолазеров создавать абляцию только в точке фокуса, на точном расстоянии от лазера. Условия абляции могут быть оптимизированы в соответствии с материалом и глубиной обработки, которая может быть модифицирована, например, путем определения углов падения лазерного пучка и расположения обрабатываемого элемента по отношению к лазерному пучку.
Преимущественно, способ, кроме того, включает стадии:
- описание формы компонента, который обрабатывается, на основе геометрии, определяемой с помощью 2, 2,5 или предпочтительно 3-х координатного представления в системе автоматизированного проектирования (САПР),
- передача данных, поступающих от САПР к программе обработки, предпочтительно трехмерной, что предпочтительно позволяет делать интерполяции и искривленных поверхностей, которые реализуются,
- определение шага, соответствующего материалу, и глубины обработки, для того, чтобы условия абляции могли быть оптимизированы,
- введение данных в информационный процессор контроля и/или управления перемещением;
- размещение в одном направлении фокальной области за счет освещения с помощью оптической головки, оборудованной или нет дифракционным устройством,
- размещение обрабатываемого компонента на рабочей поверхности,
- удерживание обрабатываемого компонента с помощью крепежных средств,
- настройка лазера с ультракороткими импульсами,
- начало программы обработки и обработка компонента с помощью лазера с ультракороткими импульсами.
В соответствии с преимущественным вариантом реализации способ изобретения реализуется в контролируемой атмосфере для того, чтобы избежать нелинейных явлений, возникающих на уровне границы раздела свет/материал, например, пробоя в воздухе или модификации физико-химических свойств окружающей среды.
Изобретение также относится к компонентам, производимым с помощью способа. Результаты изобретения также получаются на основе наблюдения, показывающего, что обработка на основе абляции с помощью фемтолазера, является подходящей для получения сильно отличающихся компонентов, особенно, компонентов и элементов, имеющих существенно уменьшенные размеры, которые должны изготавливаться с очень высокой точностью, которые не могли быть произведены на основе предшествующего уровня техники или могли быть произведены только со значительными трудностями. Таким образом, изобретение также относится в особенности к элементам передачи, особенно элементам малых размеров для использования в часовых механизмах, изготавливаемым в соответствии с этим способом. Изобретение также основывается на результатах наблюдений, показывающих, что обработка с помощью фемтолазера является особенно подходящей для шкивов и приводных ремней из синтетических или композитных материалов, имеющих очень малые размеры, используемых при изготовлении настенных/наручных часов, или форм, сконструированных для введения или формирования таких приводных ремней и шкивов.
Преимущественно, по меньшей мере, один из размеров компонента, обрабатываемого в соответствии с изобретением, составляет менее двух миллиметров и предпочтительно - менее 0,5 мм. Способ также используется для обработки деталей, которые имеют, по меньшей мере, одну нерегулярную или искривленную поверхность, характеризуемую, помимо всего прочего, по меньшей мере, одним радиусом, расположенным в плоскости кривой, величина которого больше, чем 10-9 м и меньше, чем 10-3 м, предпочтительно меньше, чем 10-5 м.
Краткое описание чертежей
Примеры вариантов реализации изобретения показаны в описании, проиллюстрированном с помощью сопровождающих чертежей, на которых:
фиг.1 - представляет в виде примера устройство для изготовления компонентов в соответствии со способом изобретения, используемым для обработки синхронных/асинхронных элементов передачи;
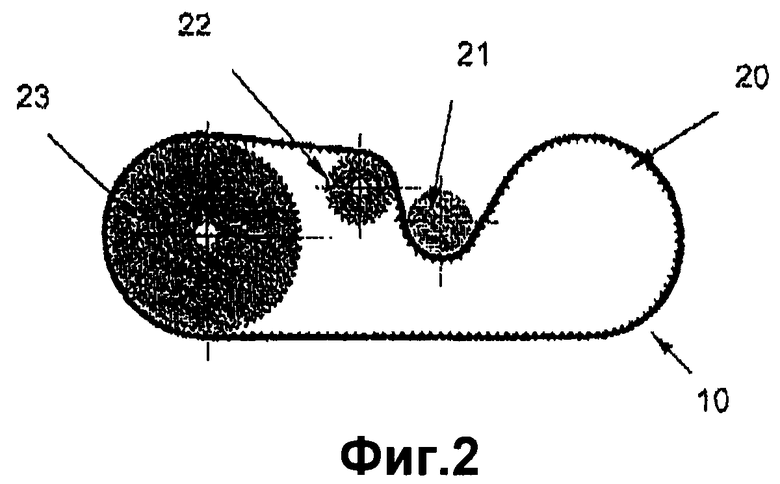
фиг.2 - представляет синхронный/асинхронный элемент передачи, составленный здесь с помощью так называемого блока параллельно натянутых приводных ремней со шкивами,
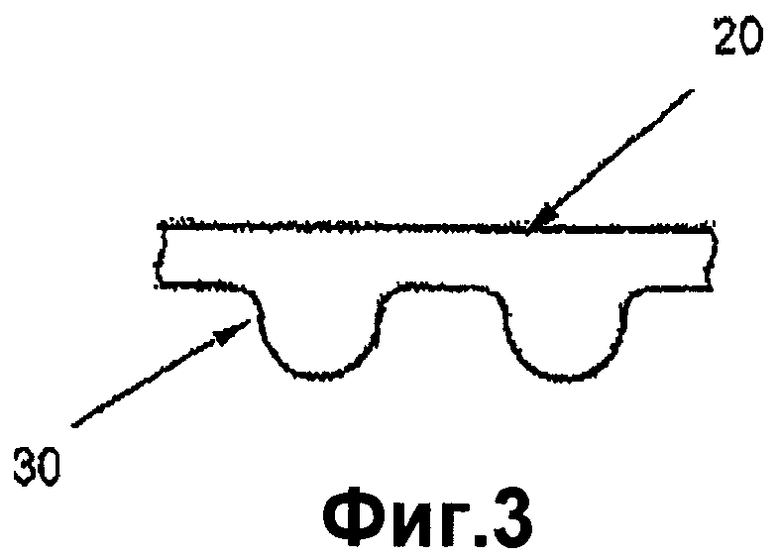
фиг.3 - представляет профиль искривленного зубца,
фиг.4 - представляет два примера асинхронных элементов передачи со вспомогательными шкивами, расположенными внутри и соответственно вне элемента передачи,
фиг.5 - представляет вид поперечного сечения многослойного приводного ремня.
Предпочтительный вариант осуществления изобретения
Фиг.1 иллюстрирует устройство для изготовления компонента 10, с синхронным или асинхронным элементом передачи для передачи перемещений или мощности, включающее:
рабочую поверхность 11, имеющую в этом примере 6 программируемых осей (А, В, С, X, Y, Z) и удерживающие средства 12 (например, такие системы, как полосы, клей, магниты, вакуум и т.п.). Оси управляются микрометрической программой обработки для робота, реализуемой информационным процессором 17 со средствами для компенсации или модификации свободных движений;
- информационный процессор 13, в особенности имеющий программное обеспечение для трехмерного моделирования, например, обеспечение на основе трехмерных координат для системы САПР,
- лазер 14 с ультракороткими импульсами типа фемтоимпульсов, имеющий оптическую головку 15, позволяющую излучать пучок 16, сконцентрированный в фокальной области (D),
- информационный процессор 17 контроля/управления смещением.
Способ обработки
Информационный процессор 13 может быть составлен, например, из персонального компьютера или рабочей станции и позволяет реализовывать программное обеспечение, что дает возможность создавать и сохранять трехмерную модель обрабатываемого компонента, а затем разрабатывать на основе этой трехмерной модели программу обработки.
Программа обработки включает ряд инструкций для перемещения осей устройства таким образом, чтобы смещать фокальную область фемтолазера в соответствии с трехмерной траекторией, что позволяет обрабатывать компонент. Создание траектории базируется на интерполяциях, и размер шагового перемещения является функцией в особенности требуемой скорости, точности и состояния обрабатываемой поверхности. Программа обработки должна определяться один раз и применяться к обработке множества идентичных компонентов.
Информационный процессор 17 контроля/управления реализует программу обработки и может состоять, например, из ПК с числовым программным управлением или промышленных ПК для управления двигателями или приводными механизмами осей для регулировки перемещений и вращений осей смещения лазера 14, связанной с ним оптической системы и/или обрабатываемого компонента, для того чтобы изменять относительное положение освещаемой области D обрабатываемого компонента 10. Таким образом, информационный процессор 17 адресует инструкции мощному вспомогательному устройству, составленному из вариаторов и электроприводов, которые реализуют перемещения осей в соответствии с требуемой точностью и скоростью.
Комбинация вращений и смещений в соответствии с шестью осями (А, В, С, X, Y, Z) в пространстве делает возможной обработку практически любого компонента (детали) 10, даже сложной.
Способ изготовления компонента 10, например, синхронного/асинхронного элемента передачи в виде приводного микроремня, включает, в особенности, следующие этапы:
- описание форм, которые обрабатываются, например, на основе геометрии, определяемой на плоскости трехмерной САПР с помощью информационного процессора 13,
- передача данных на программное обеспечение трехмерной обработки с учетом, в особенности, интерполяций искривленных поверхностей, при реализации с помощью информационного процессора 13 или с помощью информационного процессора 17,
- определение шага (расстояния смещения зоны абляции между импульсами) в соответствии с материалом и глубиной обработки так, чтобы оптимизировать условия абляции,
- введение данных в информационный процессор 17, который контролирует и регулирует смещения; передача данных между информационными процессорами 13 и 17 может происходить с помощью сети, например, типа локальной сети или Интернета, или через магнитные, оптические или электронные устройства информационного обеспечения,
- ориентация в направлении Z фокальной области D путем освещения с помощью оптической головки 15, оборудованной или нет дифракционным устройством,
- расположение и вращение в плоскости Е (определяемой осями Х и Y) обрабатываемого компонента,
- закрепление обрабатываемого компонента 10 с помощью крепежного средства 12 для размещения и удержания компонента,
- юстировка фемтолазера с ультракороткими импульсами, длительность которых зависит от материала, но предпочтительно составляет менее 500 фс (5×10-13 с), и интенсивность зависит от материала,
- начало программы обработки и обработка компонента 10 с помощью фемтолазера; программа обработки требует, чтобы последовательность лазерных импульсов генерировалась вдоль непрерывной или прерывистой траектории, проходящей по освещаемой зоне так, чтобы происходила абляция освещаемых зон; траектория в зоне абляции и, таким образом, формы, которые обрабатываются, описываются на основе геометрии, определяемой на плоскости трехмерной САПР; шаг по времени определяется в соответствии с материалом и глубиной обработки для оптимизирования условий абляции.
Сравнительные тесты показывают, что факт прохождения импульсов длительностью от 100 до 10 фс значительно улучшает точность обработки. Потоки, используемые в микрообработке, традиционно изменяются от 0,2 до 50 Дж/см2 в соответствии с искомым качеством обработки и скоростью, предпочтительно, менее чем 10 мкм на импульс, и обычно, по меньшей мере, от 0,5 до 0,25 мкм на импульс, в соответствии с обрабатываемыми материалами. Точность абляции четко улучшается по сравнению с традиционным лазером типа пикосекундного или эксимерного лазера.
Лазер с ультракороткими импульсами не рассеивает тепло вне освещаемого объема, независимо от обрабатываемого материала. Бестепловая (термонейтральная) природа способа реализуется благодаря короткой длительности импульсов в сочетании с очень высокой интенсивностью порядка 1014 Вт/см2 на уровне фокальной плоскости пучка. Текущая тенденция в этой области ориентирует приборы на использование импульсов 100 фс (1,0×10-13 с) для энергии порядка МДж на импульс.
Физически, электроны подвергаются нагреванию благодаря явлению инверсного тормозного излучения. Испускаемые электроны передают свою энергию другим электронам атомной цепочки за счет ударов и вызывают лавинную ионизацию, которая приводит к выбросу вещества. Передача энергии электронов атомной цепочке обрабатываемого материала происходит в промежуток времени, который приблизительно в 1000 раз менее короткий, чем длительность импульса. Таким образом, абляция вещества происходит перед любой термодиффузией, которая может возникать вне зоны освещения.
Градиент энергии лазерного пучка, таким образом, предпочтительно определяется так, что только интенсивность центральной зоны, сечение которой составляет менее 50% полного сечения пучка, больше, чем абляционный порог материала. Разрешение обработки, таким образом, ниже, чем максимальный диаметр пучка.
В одном варианте реализации изобретения используются два полностью синхронизованных и непараллельных пучка фемтолазера. Интенсивность каждого лазера меньше, чем абляционный порог материала, который обрабатывается только в точке пересечения пучков обоих лазеров. Таким образом, возможно обрабатывать полые компоненты.
Интенсивность импульсов или их длительность может быть предпочтительно подобрана помощью управляющих средств информационного процессора 17, в соответствии с материалом, который обрабатывается и требованиями, касающимися точности и скорости. Таким образом, возможно модифицировать эти параметры в ходе цикла обработки одного и того же компонента.
В общем, относительное смещение лазерного пучка и компонента, которая обрабатывается, основано на пространственном управлении держателем детали. Можно отметить в способе согласно изобретению, что в частных случаях пучок можно отклонять, независимо от смещения компонента для осуществления абляции, на выходе оптической головки, с помощью различных зеркальных оптических систем, сканера, телескопа и т.п. Смещение лазера также возможно осуществлять, но риск его инерции делает эти смещения более медленными для стабилизации по сравнению со смещениями компонента.
Большинство форм, обрабатываемых на элементах, приводящих в действие элементы 10 передачи или любые другие микро- и нанокомпоненты, может обрабатываться в одной плоскости. Как в случае обработки более сложных поверхностей, таких, как сложные зубчатые поверхности (не представлены), возможно перемещать точку попадания лазерного пучка 16 одновременно соответственно по трем осям, или даже по четырем осям с плоскостью вращения 11 и поворотной оптической головкой 15.
Скорость смещения компонента определяется на основе компромисса в соответствии с требуемой скоростью изготовления, требуемой точностью или разрешением и искомым состоянием поверхности. Таким образом, множество компонентов будет обработано за счет серии смещений при различной скорости.
Для предотвращения нелинейных явлений, появляющихся из-за наличия границы раздела излучение/материал, обработка может производиться в вакууме или при наличии нейтрального газа (гелий, аргон и т.д.). Обработка в управляемой атмосфере дает возможность избежать нелинейных эффектов, возникающих на границе раздела излучение-материал, например таких, как пробой воздуха на уровне фокальной плоскости и, как следствие, проявление влияния нестабильности на качество обработки. В случае конкретного использования, для улучшения абляционной энергетической эффективности, будет возможно улучшить оптическую точность за счет принятия дифракционной системы или оптического вспомогательного устройства, смонтированного для дополнения устройства фокусировки.
Геометрическое представление обрабатываемых компонентов; смещение освещаемой зоны
Наиболее доступными на сегодняшний день перемещениями, которые могут быть реализованы за счет освещаемой зоны компонента, являются следующие:
a) быстрое позиционирование, которое заставляет подвижные элементы достигать программируемой точки за счет прохождения линейной траектории с максимальной возможной скоростью для устройства обработки,
b) линейная интерполяция, которая позволяет достигать программируемую точку путем прохождения линейной траектории с нарастающей скоростью, заданной программистом,
c) круговая интерполяция, функция которой должна описывать полные окружности или дуги окружности на основании определенных характеристических геометрических элементов, которые их определяют, например, таких как координаты центра и координаты экстремумов,
d) винтовая интерполяция, которая совмещает круговое перемещение в одной плоскости с параллельным перемещением, перпендикулярным этой плоскости,
e) коническая интерполяция в плоскости, где каждый параболический сегмент геометрически определен с помощью группы из 3 точек, причем последняя точка сегмента является первой точкой следующего сегмента,
f) полиномиальная интерполяция, которая позволяет определять траектории из полиномиальных степеней и которая используется для подбора сплайновых кривых.
В случае изготовления микроэлементов передачи, например, приводных ремней, большинство форм может быть обработано в одной плоскости. Из-за этого обращаются к технологии обработки в 2-х или 2,5 координатном представлении. Следующие операции обработки могут реализовываться с помощью способа изобретения и устройства:
a) контурная обработка (тип обработки, когда инструмент остается на постоянной глубине, пока он описывает на плоскости ряд прямых и кривых),
b) сверление и связанные с ним операции,
c) обработка отрицательных объемов.
В случае обработки более сложных поверхностей, таких как зубчатые или искривленные поверхности, лазерный пучок будет перемещаться одновременно с вращающейся пластиной и способной поворачиваться оптической головкой вдоль трех или даже более осей. Поворот оптической головки вдоль двух осей (поворотная головка) на поворотной пластине также возможен. Окончательно, также возможно смещать фокусное расстояние параллельно оси Z.
Способ обработки изобретения обладает особым преимуществом благодаря тому факту, что он позволяет не ограничивать геометрию сегментами прямых (простая интерполяция) или окружностей. Кроме того, обычным, особенно при традиционной методике обработки, используемой при изготовлении настенных/наручных часов, является столкновение с чертежами или соединениями, определяемыми более или менее неопределенно или даже не выраженными явным образом (геометрия, происходящая из пересечения двух поверхностей, установленных формой инструментов). Очевидно, эти традиционные способы не являются подходящими для сложных с точки зрения обработки и, особенно, искривленных поверхностей, и более широко, для всех операций, где требуется точный контроль пересечений (округлений) поверхности.
Для того чтобы иметь возможность обработки за счет абляции вещества, во всех возможных случаях формы поверхностей, которые обрабатываются, могут определяться с помощью математических принципов, использующих геометрию и алгоритмы (графы, алгоритмическую геометрию, вероятностные алгоритмы).
Традиционно, геометрическое представление сложных поверхностей, генерированных за счет метода абляции вещества с помощью лазера с ультракороткими импульсами, требует определения специальных кривых, называемых кривыми свободной формы. Более современным способом представления является способ, использующий кривые Безье. Также они встречаются под именем В-сплайн кривых.
Для более сложных форм и особенно для тех, которые попадают под определение криволинейных профилей, для которых являются необходимыми конические кривые (дуги окружностей, эллипсы, парабола и т.п.), используются рациональные кривые, где коническое представление реализуется с помощью полиномиальных коэффициентов, а не с помощью интегрального полиномиального параметрического уравнения. Для определения поверхностей, которые обрабатываются, могут быть использованы наиболее общие рациональные кривые, а именно рациональные кривые Безье, определяемые полиномами, где одна поверхность разлагается на простые элементы, называемые единичными элементами, каждый из которых определяется точками, называемыми полюсами, или сплайн-и совокупность неравномерных рациональных В-сплайн кривых (NURBS), определяемых рядом точек, формирующих поверхностные элементы в сети.
Эти семейства кривых можно описать более точно:
- кривые Безье: параметрические кривые, особо привлекающие следующие понятия: полиномы Бернштейна, алгоритм оценки Де Кастела, подразделение, степенное увеличение, дифференцирование, геометрические свойства (аффинная инвариантность, выпуклая оболочка, вариационное приведение);
- В-сплайн функции: определяемые как базис P(k, t, r), многообразие узлов. Ск класс соединения, локальная и минимальная опора,
- В-сплайн-кривые в форме параметрических В-сплайн кривых, привлекающие понятия контрольных полигонов, алгоритмов оценки де Бура, и имеющие особые геометрические свойства, такие, например, как аффинная инвариантность, локальный контроль, выпуклая поверхность, множество узлов на краях, вставку узлов,
- геометрические сплайновые кривые, которые связаны с понятием геометрической непрерывности, геометрических инвариантов, так же, как и с известными формами рамок Френе, η-сплайнов, τ-сплайнов.
Способ обработки за счет абляции вещества с помощью лазера с ультракороткими импульсами, отличающийся от других способов обработки тем, что он использует неявные, зависящие от требуемой точности обработки или сложности, алгоритмы данных, основанные на следующих математических принципах, при этом данный список не является исчерпывающим:
- кривизна, закручивание, рамки Френе, теорема Джордано, изопериметрические неравенства, фокальные оболочки или кривые,
- поверхности и гиперповерхности как две фундаментальные формы поверхности и, в особенности, кривых, формула Гаусса-Бонне, внутренняя геометрия, параллельный перенос, геодезия,
- теория Морзе для связывания многообразия гомотопического типа в критические точки родовой функции, имеющей определенные хорошие свойства, включая демонстрацию формулы Гаусса-Бонне, а также Хессиана, критические точки и лемма Морзе,
- функции, определяемые на поверхности, такие как функции высоты и расстояния,
- векторные поля и диаграмма Морзе, методики, в особенности используемые в теориях реконструкции,
- комбинаторные и алгебраические топологические элементы, и, в особенности, - триангуляция, симплициальные комплексы, характеристики Эйлера-Пуанкаре, переменные, теорема классификации поверхностей,
- элементы дифференциальной геометрии: поверхностная геометрия в R3: приложение Гаусса, принципиальная кривизна и направления, классификация точек (эллиптические, гиперболические, параболические, плоские), фокальные и геодезические поверхности,
- Евклидовы квадрики и гладкоповерхностные соприкасающиеся квадрики,
- остовы в аспекте плоских кривых, эволюты, скелетирование, так же, как их геометрические критерии (расстояние до остова, дифференцируемость расстояния, хребтовая функция и функция долины и их топологические свойства (гомотопия и ретракты),
- ссылки на диаграмму Voronoi, триангуляции Делане в 2-координатной системе и скелетные аппроксимации,
- реконструкция и объединение поверхностей, особо принимается во внимание ограниченная триангуляция Делане, энергетическая теорема гомтопии и геоморфизма, но также отбор критериев или кривых и поверхностей,
- алгоритмы усовершенствования поверхностей, алгоритмическая геометрия и в особенности пересечения сегментов, двумерное и n-мерное вычисление выпуклой оболочки, свойства дуализма, линейное программирование,
- структуры геометрических данных, сложных или нет, связанные с детерминированным или вероятностным алгоритмами,
- использование интерполяции и сглаживающих алгоритмов, так же, как перекрестной проверки, относящейся к выбору параметров сглаживания, и особенно, при этом данный список не является исчерпывающим:
- сглаживание по методу наименьших квадратов (принимая во внимание вес и ограничения),
- интерполяция полиномиальными сплайнами, сплайн-пространствами, минимизацией энергии, алгоритм вычисления интерполяционного сплайна; сплайновых базисов (S-сплайна);
- сплайновое сглаживание: сглаживающие сплайны, вычислительные алгоритмы, методы перекрестной проверки для выбора сглаживающего параметра.
Способ абляции, описанный в настоящем изобретении, широко базируется на алгоритмах, использующих методику совокупности неравномерных рациональных В-сплайн кривых (NURBS).
Мы определили эти NURBS кривые как ряд методик, служащих для интерполяции и аппроксимации кривых и поверхностей. Эти методики являются весьма актуальными в формальных и цифровых вычислительных системах и принимаются основным программным обеспечением с геометрическим моделированием, таким, например, как САПР или САПР/АСУП системами.
Эти функции определяются на основании реальных величин, называемых узлами (точками пересечения)у которые соответствуют однородному случаю. Они имеют заданную степень, для стандартных форм, которые мы обрабатываем, она равна 2 или 3, редко больше. Их величина имеет значение между 0 и 1, но она не равна нулю только на протяжении одного интервала.
Чем выше степень, тем более гладкой является описываемая функция:
- степень 1 = непрерывная функция,
- степень 2 = дифференцируемая функция (без угловых точек),
- степень 3 = дважды дифференцируемая функция (нет разрыва кривой).
Когда узел модифицируется, функция непрерывно деформируется.
Когда два узла совпадают (узел становится двойным), существует потеря непрерывности или с разрывностью, или угловой точкой, или разрывом кривой.
Порядок непрерывности в одном узле равен степени минус кратность узла,
например:
- В-сплайн степени 2, простой узел → дифференцируемость,
- В-сплайн степени 2, двойной узел → угловая точка,
- В-сплайн степени 2, тройной узел → разрывность,
В случае кривых, определяемых контрольными точками (например, зубчатый, профиль), даны точки плоскости, (называемые контрольными точками) и ряд величин (называемых узловым вектором). Могут быть упомянуты фундаментальные свойства:
1) кривая полностью содержится в выпуклой оболочке (так как коэффициенты комбинации содержатся между 0 и 1, с суммой, равной 1).
2) это определение не зависит от размера, таким образом, оно может быть использовано и в плоскости как в трехмерном пространстве, и за ней;
3) кривая зависит только от относительного положения узлов; если осуществляется перенос или подобие, кривая остается неизменной; узлы (0, 0, 1, 2, 4, 4, 4) будут давать такую кривую, как (-1, -1, 1, 3, 7, 7, 7);
4) если базисная функция равна 1, другие равны нулю, и кривая проходит через контрольную точку, которая, в частности, связана с ней, когда первый (соответственно последний) узел является кратным, первая (соответственно последняя) базисная функция становится равной 1, и кривая проходит через первую (соответственно последнюю) точку, имеется так называемая плавающая экстремальная кривая, специальным случаем которой являются кривые Безье.
Интересно окончательно определить роль однородных координат, определяющих относительные кривые.
Окончательно будет отмечено, что только описанный выше математический метод может гарантировать факторы подобия, полезные для качественной практики теории механизмов, применяемой для микро- и наномеханизмов (касающейся скольжения, трения, зацепления и других условий).
Части и компоненты, которые могут быть изготовлены с помощью способа согласно изобретению
Обработка на основе абляции с помощью фемтолазера используется для изготовления частей и элементов, которые имеют уменьшенные размеры и которые должны быть изготовлены с очень высокой точностью, особенно, но не исключительно в области измерения времени. Этот способ является особенно подходящим, когда, по меньшей мере, один из размеров компонента, по меньшей мере, в одном направлении, меньше или равен 2 миллиметрам. Размеры пересчитываются и определяются как измерение сегмента, который соединяет две точки одного и того же компонента, которые являются наиболее удаленными вдоль одного и того же направления. В большинстве случаев этот способ подходит для изготовления всех микромеханических и наномеханических элементов, определение радиуса контакта (пересечения двух поверхностей) которых требует размерных условий с точностью до миллиметра.
Таким образом, способ изобретения, например, используется для изготовления элементов передачи, особенно элементов малого размера, например, для применения при измерении времени.
Изготовленные части могут иметь, по меньшей мере, одну кривую, часто нерегулярную, сформированную в перпендикулярной плоскости, по меньшей мере, с одним радиусом, большим, чем 10-9 м и меньшим, чем 2 мм. Может быть дан один пример при наблюдении краев, который отмечает пересечение двух поверхностей, полученных при любой обработке. На макроскопическом уровне (на шкале нескольких миллиметров, 10-3 м) предполагается, что эти края являются прямолинейными или круглыми и формируются за счет выступающих вперед или тупых углов. Однако на микроскопическом уровне, эти же самые линии характеризуются в плоскости, перпендикулярной линии края, более или менее регулярной геометрией, имеющей, по меньшей мере, один радиус, часто называемый закруглением, величиной не больше, чем несколько десятых миллиметра.
Способ изобретения особенно применяется для обработки всех или отдельных компонентов следующих элементов измерения времени:
- корпус часов, в особенности пластина, имеющая углубления и отверстия и служащая как поддерживающая рамка;
- мостики прямой или искривленной формы служат для удерживания или управления при вращении или при переносе различных компонент микромеханизма,
- материальная связь между твердыми телами, и, особенно, обшивка, скольжение, простая или скользящая ось поворота, переноса или вращения, винтовое или плоское крепежное средство, простое или шарнирное соединение в замок, линейное кольцевое, линейное прямоугольное, точечное и тому подобное
- аккумулирующие энергию элементы, в частности пружины и элементы сердечника катушки,
- микро- и наноустройства передачи с помощью прямых или искривленных зубчатых передач, шкивов, фрикционных колес, жестких или гибких гомокинетических соединений, гидростатических и гидродинамических элементов,
- поворотные или скользящие соединения,
- механические элементы памяти (накопительные элементы), особенно кулачки,
- компоненты, относящиеся к функции регулятора хода и особенно те, которые служат для распределения мощности, в особенности системы с фиксатором, цилиндром, английским рычагом, стержнем, возвратным колесом и т.п., особенно следующие элементы: колесо регулятора хода, зубец регулятора хода, обод, рычаг, втулка, балансир, шток, собачка, или входящий, или выходящий импульс, вилка, входная или выходная вилка, стрелка, ограничивающее приспособление, входной или выходной болт, малый и большой валик безопасности, противовес,
- осциллирующие элементы, называемые регулирующими элементами, они являются элементами семейства маятников или элементами винтового баланса, и в общем, все колебательные системы демпфирующего типа или нет, линейные или нет, имеющие или нет механические или вязкоупругие демпфирующие устройства, включающие следующие расположенные рядом элементы: регулировочный кран, противовес, место крепления камня, штифт, несущий штифт, стрелка, балансировочная пружина, сложные обратный или прямой разматываемые геликоиды на основе противовеса, элементы, присоединенные к регулирующим вращение системам и, в частности, без какого-либо ограничения, турбилоны или карусели,
- массы, движущиеся возвратно-поступательно, находящиеся в круговом вращении, линейном или поворотном,
- элементы для профилирования,
- внешние элементы, особенно такие, как стекло, оправа, средняя часть, кнопка намотки, корректоры, циферблат, стрелки, кольцевой ободок, днище, ушки, ремешки для часов и их компоненты, кнопки сдвига, элемент дисплея, верхние части, символы дисплея, такие как индикаторы простой или постоянной даты, индикаторы установки времени, индикаторы лунной фазы, стрелка звонка,
- корпус, составленный из одной или нескольких частей, имеющий или нет такие элементы, как кнопки намотки, верхние части, кнопки сдвига.
Изготовление элементов передачи в виде приводных ремней
Как показано, способ согласно изобретению также подходит для изготовления синхронных или асинхронных элементов передачи, в частности микро- и наноэлементов передачи, например, шкивов, гладких или зубчатых приводных ремней, цепочек, правых или левых шестерней, гомокинетических элементов передачи и т.д. Такие элементы передачи используются, например, при измерении времени или в других миниатюрных устройствах. Некоторые элементы передачи, обрабатываемые с помощью этого способа, таким образом, не будут описываться более подробно.
В одном варианте реализации изобретения элементы передачи движения/мощности, использующие приводные ремни, изготовленные в соответствии со способом изобретения, являются асинхронными, и образуются, по меньшей мере, одной шестерней, одним плоским или трапециевидным или слоистым приводным ремнем, и предпочтительно имеют, по меньшей мере, один натягивающий и/или направляющий бегунок, расположенный внутри или вне микроремня. Асинхронизм возникает из-за возможности ремней скользить по шкивам под действием слишком высокого вращающего момента.
Кроме того, асинхронные микроэлементы передачи в виде приводных ремней могут быть закреплены на поворотной шине или шине для скользящего контакта, что позволяет увеличивать угол намотки на шкивы или обеспечивать функции объединения/разделения.
Синхронные микроэлементы передачи в виде приводных ремней образуются, по меньше мере, двумя зубчатыми шестеренками и зубчатым приводным ремнем того же блока, действие которого состоит в том, что он дает возможность передавать механическую энергию между моторным элементом и приемным элементом без скольжения, таким образом корректируется проблема, вызванная функциональным или случайным скольжением асинхронных элементов передачи, особенно в случае перегрузки. Микро- или наномеханическая цепочка будет рассматриваться здесь как частная форма зазубренного приводного ремня, так как он сам оставляет такую метку на зубцах.
Синхронные элементы передачи движения/мощности с помощью зазубренного приводного ремня в особенности включают:
- несущую геометрию с регулируемой деформацией (диапазон эластичности материала),
- зубчатое зацепление с криволинейным или многоугольным профилем,
- орторадиальное, прямое, наклонное или криволинейное зубчатое сцепление, расположенное в несущей плоскости.
Компоненты элементов передачи движения/энергии, полученные с помощью способа согласно изобретению, изготовлены из материала, имеющего механические характеристики, достаточные для обеспечения функции передачи, например, из пластика, полимера, металла, композита, послойной структуры (в виде сэндвича) и т.п.
Элементы передачи в соответствии с данным способом могут включать, например, шкивы и приводные ремни, являющиеся гладкими или имеющие зубцы, расположенные в пространстве в соответствии с шагом менее двух миллиметров, например, приводные микроремни или шестерни, для которых высота зубчатого зацепления составляет порядка 0,5 мкм, так же, как и приводные ремни, глубина или ширина зубца для которых составляет менее двух миллиметров. Толщина или ширина самого приводного ремня составляет предпочтительно также менее чем два миллиметра. Пределы точности обработки связаны со смещением пучка. Такие элементы, в особенности такие приводные ремни и такие шкивы, например, конструируются для того, чтобы использовать их в механизме хода часов, других компонентах часов или других микромеханических компонентах.
С помощью примера согласно фиг.2 иллюстрируется синхронная передача движения/мощности 10 (компонент) через приводной ремень, изготовленный полностью или частично с помощью способа согласно изобретению. Комплект включает в особенности главный шкив 23, приводной ремень 20, вспомогательный шкив 22 и натяжной бегунок 21. Шкив 23 является плоским, на периферии он снабжен равноотстоящими радиальными зубцами, которые могут быть приравнены к плоской зубчатой шестеренке. Шкив 23 снабжен выступом (не представлен) для направления приводного ремня 20. Возможно изготовить все компоненты этой передачи, или только часть, с помощью способа согласно изобретению на основе абляции за счет фемтолазера.
Ремни 20 предпочтительно имеют криволинейные зубчатые профили 30, показанные на фиг.3. Этот криволинейный профиль позволяет осуществлять эффективную передачу энергии, даже когда значительно изменяется радиус кривизны приводного ремня, например, когда ремень работает со шкивами весьма различных диаметров. Криволинейный зубчатый профиль также может быть подобран для шкивов.
При изготовлении элементов синхронной передачи выступы (не показаны) располагаются на одном шкиве 23, предпочтительно на том, который имеет наименьший диаметр.
Фиг.4 иллюстрирует два примера асинхронной передачи 10 с внутренним/внешним дополнительными шкивами 22, где асинхронный шкив 23 является плоским и снабжен выступами (не показаны) на обеих сторонах указанного шкива 23 для того, чтобы направлять приводной ремень 20 на указанную передачу 10 (компонент).
Настоящее изобретение дает возможность использовать сложные материалы без ограничения размеров, так же, как и структуры типа сэндвича или композиты, в особенности для приводных ремней. Фиг.5 иллюстрирует пример многослойных ремней 50 с несколькими слоями 51.
Необходимо отметить, что в случае шкивов 23 или микрометрических или нанометрических элементов малых размеров с криволинейными профилями 30 или без них, правила не предписываются; профили являются персонифицированными. Кроме того, для каждого типа зубчатого профиля будут зубцы с прямыми или кривыми боковыми поверхностями (ножками) (не показаны).
Изготовление зубчатых передач
Изобретение также касается изготовления миллиметровых или нанометровых зубчатых передач, причем зубчатая передача понимается здесь как элемент, входящий в состав синхронной передачи, обеспечивающий соединение между двумя валами (шпинделями) и передачу механической энергии от одного управляющего движением вала (мотора) к управляемому валу (приемнику) при поддержании постоянного отношения угловых скоростей.
Могут рассматриваться различные формы зубчатых передач:
Элементарная форма представляет собой так называемую «внешнюю параллель» и характеризуется, помимо отсутствия относительного скольжения двух находящихся в зацеплении шестеренок, отношением угловых скоростей, равным обратному отношению числа зубцов или диаметров и относительным вращением шестеренок в противоположном направлении. Вариант называется «внутренняя параллель», если две шестеренки поворачиваются в одном и том же направлении. Эта описанная форма внешней или внутренней параллели, с прямыми зубцами, также характеризуется шагом, модулем и отношением передачи. Геометрия зубцов описывается симметричным образом в плоскости зубчатой передачи, следующей за криволинейным профилем.
Более сложная форма отвечает критериям геликоидального зубца, определяемого «отрегулированной поверхностью», получаемой за счет бесконечности тангенсов на основной винтовой линии зубца. Ее также можно определить как поверхность, возникающую за счет движения по спирали вдоль винтовой линии зубца.
Отдельная форма, называемая «шестеренкой реечной передачи», отличается тем, что реечная передача является отдельной шестеренкой, чья основная линия является прямой, ее можно видеть с точки зрения геометрии как шестеренку с неограниченным диаметром.
Преобразование кинематики геликоидальной зубчатой передачи в кинематику реечной передачи является возможным. Необходимо убедиться, что, когда два основных цилиндра зубчатой передачи поворачиваются без скольжения, два связанных основных геликоида остаются постоянно тангенциальными, что подразумевает два условия:
- два геликоида должны поворачиваться в противоположных направлениях, т.е. одна шестеренка слева может формировать параллельную зубчатую передачу только с шестеренкой справа;
- геометрические условия присоединения к зубчатой передаче (условия объединения) должны соблюдаться.
Способ согласно изобретению также позволяет изготавливать конические зубчатые передачи. Первоначально необходимо рассматривать прямую форму, в которой основные поверхности являются двумя конусами, имеющими одну и ту же вершину, которые катаются друг по другу без скольжения. Зубцы являются прямыми или спиралевидными. В частном случае конических зубчатых передач необходимо уделить внимание проблемам непрерывности зубчатой передачи и взаимному влиянию при способе, называемом дополнительным способом зубчатой передачи. Этот подход позволяет изучать зубчатую передачу на примере конической передачи с достаточной аппроксимацией за счет простого рассмотрения параллельной зубчатой передачи. Таким образом, все вопросы, относящиеся к непрерывности зубчатой передачи, взаимному влиянию, относительному скольжению решаются путем рассмотрения параллельной зубчатой передачи в соответствии с угловыми скоростями, количеством зубцов, модулем давления и величиной угла.
Настоящее изобретение также позволяет изготавливать криволинейные зубчатые передачи, например, шестерню, имеющую «бесконечный» червяк. «Бесконечный» червяк входит в зацепление с его сопряженной шестерней на данном расстоянии от центра. В предшествующем уровне техники шестерни обычно подравниваются с помощью инструмента, точно соответствующего «бесконечному» червяку, с которым они должны вступать в зацепление (метод огибающей). Использование лазера с ультракороткими импульсами освобождает от этого ограничения, относящегося к малым размерам, что, с другой стороны, является невозможным при традиционных методах. В этом типе зубчатой передачи особое внимание будет уделяться относительному скольжению так же, как понятию реверсивности.
Усовершенствованная форма, относящаяся к геликоидальным криволинейным зубчатым передачам в особенности из-за точного контакта между зубцами, делает работу с малыми нагрузками особенно эффективной для малых перемещений.
Сложная форма, называемая гипоидной зубчатой передачей, также будет приниматься во внимание, особенно потому, что абляционный метод позволяет работать с формой очень малого размера, что не допускается любым другим методом.
Независимо от формы и размера зубчатых передач, существенно при конструировании наблюдать взаимное влияние условий и особенно тех, которые связаны с асимметричными формами и условиями обработки.
Описанные методы, упомянутые для формирующих кривых и этих искривленных поверхностей, обеспечивают преодоление геометрического взаимного влияния. Кроме того, методика лазерной абляции с помощью ультракоротких импульсов делает возможным управление взаимным влиянием при обработке. При объединении двух этих аспектов настоящее изобретение обеспечивает соответствующий отклик на определение, изготовление и устранение взаимного влияния для микро- и нанопередачи, независимо от форм зубцов и используемых материалов.
Изготовление микроформ
В предшествующем уровне техники шкивы, зубчатые шестерни и натяжные бегунки изготавливаются с помощью традиционных методов, таких как токарная обработка и/или фрезерование, электроэрозионные методы, ультразвуковая обработка и т.д. Традиционные приводные ремни в особенности изготавливаются с помощью формования, с формами, изготавливаемыми при использовании электроэрозионного метода, ультразвукового или даже процесса, состоящего из литографии, нанесения электролитического покрытия и формования (LIGA).
Эти методы являются подходящими для изготовления микроформ, имеющих размеры свыше миллиметра. Они требуют использования инжектируемых пластиковых материалов и плохо подходят для изготовления частей, использующих такие материалы, как металлы, композиты или, например, даже гетерогенные многослойные материалы. Температура или динамическая вязкость определяют предел использования таких микроформ, даже при изготовлении деталей из синтетических материалов.
Даже если они могут быть введены в использование, предшествующий уровень техники требует, чтобы формы изготавливались с достаточной точностью. Таким образом, целью настоящего изобретения является получение микроформ, используемых для изготовления передач или элементов передачи, которые инжектируются или которые имеют структуры типа сэндвича или композитные структуры. Например, многослойный приводной ремень согласно фиг.5 с несколькими слоями может преимущественно изготавливаться, в зависимости от размеров, за счет формования или инжектирования в микроформу, обработанную с помощью способа изобретения.
В общем, формы, обработанные с помощью способа, описанного в изобретении, какого бы типа они не были, определяются конкретным числом функциональных подгрупп:
- элементы формования: штампование (штамп и матрица),
- функциональные элементы: каркасы, элементы питания, механизм для освобождения и изъятия из формы инжектированных частей, устройства регулирования температуры формы,
- дополнительные элементы: крепежные и удерживающие устройства, центрирующие системы, роботы для установки вставок и выделения сформированных частей, устройства безопасности и регулировки изъятия из формы.
Способ обработки с помощью лазера с ультракороткими импульсами используется для изготовления емкости штампования, в которой трехмерное отрицательное представление объекта (все корректировки размеров включены) ограничивается двумя частями, которые являются штампом и матрицей.
Этот способ позволяет изготавливать любую формованную микро- или нанодеталь (компонент), пока осуществляется формование и позволяет вязкость используемых материалов (очень малые размеры). Достигаемые поверхностные состояния являются отличными, что особенно важно для компонентов, испытывающих трение.
Обрабатываемые материалы
В зависимости от обрабатываемого компонента способ согласно изобретению может использоваться для обработки большого числа различных материалов. Он является особенно подходящим для обработки изотропных, полиморфных (например, ламинированных) или твердых композитных материалов, в особенности пластмасс, металлических, минеральных или композитных веществ.
Под пластичным материалом понимается любой материал, имеющий в качестве основного компонента «высокомолекулярный полимер», где определение дается по нормам ISO 472 и ISO 471 (January 2002). «Высокомолекулярный полимер» или, более обобщенно, «полимер», представляет собой продукт, состоящий из молекул, характеризуемых большим количеством повторений одного или нескольких видов атомов или групп атомов (составляющие элементы), связанных в количествах, достаточных, для того, чтобы приводить к ряду свойств, которые практически не изменяются при присоединении или исключении одного или небольшого числа составляющих элементов (ISO 472). Это также продукт, составленный из молекул полимера с высокой молекулярной массой (ISO 472).
Следующие пластичные и/или полимерные материалы могут в особенности быть обработаны с помощью способа согласно изобретению:
- полиолефины, например, полиэтилен РЕ, полипропилен РР, полиизобутилен P-IB, полиметилпентен Р-МР,
- поливинилхлорид PVC и его производные в соответствии с нормами ISO 1043-1/458-2/4575/1264 1060-2/2898-1, 6401, и в особенности хлорированный поливинилхлорид PVCC, поливинилиденхлорид PVDC, сополимеры винилхлорида и пропилена VC/P, соединения винилхлорида и хлорированного полиэтилена PVC/E, соединения поливинилхлоридов и акрилонитрил-бутадиен-стирола PVC/ABS, привитых сополимеров винилхлорида и PVC/A, сополимеров винилхлорида и винилацетата PVC/AC,
- поливинилацетаты PVAc и их производные, в особенности поливинилацетат PVAC, поливиниловый спирт PVAL, поливинилбутитраль (бутират) PVB, поливинилформальдегид PVFM,
- стиролы (винилбензол) в соответствии с нормами ISO 1043-1/2580-1/2897-1/4894-1/6402-1, в особенности стиролбутадиен SB, стиролакрилонитрил SAN, акрилонитрил-бутадиен-стирол ABS, акрилат-стирол-акрилонитрил ASA,
3-(триметоксисилил)пропилметакрилат MSMA, соединения на базе полистирола PS и особенно, PC/ABS, ABS/PA, PS/простой полифенилэфир РРЕ, PS/PP и PS/PE, полиакрилы (полиметилметакрилат) РММА в соответствии с ISO 7823-1/7823-2/8257-1, полиакрилонитрил PAN, сополимер акрилонитрил/метилметакрилат А/ММА, сополимер акрилонитрил/бутадиен, сополимер стирол/акрилонитрил SAN, сополимер акрилонитрил/бутадиен/стирол ABS, сополимер метилметакрилат/акрилонитрил/бутадиен/стирол MBS и т.п.,
- соединения или сплавы PMMA/AES,
- насыщенные сложные полиэфиры - полиалкилен- и полибутилен-терефталат PET и РВТ в соответствии с ISO 1043-1/1628-5/7792-1,
- полиамиды PA в соответствии с ISO 1043-1/1874-1/599/3451-4/7628-1/7628-2/7375-1/7375-2, особенно нейлон PA 6.6, PA 6.10, PA 6.12, PA 4.6, PA 6, PA 11, PA 12 и т.д.,
- полиоксиметилен РОМ, в соответствии с ISO 1043-1, фторполимеры в соответствии с ISO 10943-1, политетрафторэтилен PTFE, полихлортрифторэтилен PCTFE, поливинилиденфторид PVDF, фторированный этилен-пропилен FEP, сополимер этилена PTFE-ETFE, целлюлоза в соответствии с ISO 1043-1, нитрат целлюлозы или нитроцеллюлоза CN, этилцеллюлоза ЕС и метилцеллюлоза МС, ацетат целлюлозы СА и триацетат целлюлозы СТА,
- полимеры с ароматическим каркасом в соответствии с ISO 1043-1, особенно, поликарбонаты PC в соответствии с ISO 1043-1/1628-4/7391-1/7391-2, полифениленсульфид PPS, простой полифениленэфир РРЕ, поли(2,б-диметил-1,4-фенилен)оксид, простой полифениленэфир, простой полиэфирэфиркетон PEEK, полиарилэфиркетон РАЕК, простой полиэфиркетон, ароматический полисульфон PSU, простой полиэфирсульфон PESU, полифенилсульфон PPSU, ароматический полиамид, полиариламид РАА, полифталамид РРА, полуароматические аморфные полиамиды РА 6-3Т, полиамидимид PAI, (бисфенол А)-политерефталат (полиакрилат), простой полиэфиримид PEI, пропионат целлюлозы СР и ацетат-пропионат целлюлозы CAP, ацетат-бутират целлюлозы CAB, жидкокристаллические полимер (Vectra®, Sumika® и Zenite®), термопластичные эластомеры в соответствии с ISO 1043-1, упорядоченные сополимеры типа Hytrel© или Pebax©, иономеры типа Surlyn®, ультрабленд S® (BASF) PBT+ASA, киколой - cycoloy® (GB Plastics, Lastilac (Lati) PC+ABS, ксеной - xenoy® (GE plastics) PC+PET, оргалой - orgalloy® RS6000 (ATO) PA6/PP, STAPRON® N (DSM) ABS/PA 6, ластифлекс - lastiflex® AR-VO (Lati), PVC+терполимеры и т.п.,
- полиуретаны в соответствии с ISO 1043-1, особенно для получения литых эластомеров или термопластиков или полиуретан-полимочевины (термоотверждение) или пенополиуретанов, микропористые эластомеры из следующих композитов: полиуретан PUR, изоцианат + поставщик водорода, изоцианат, полиизоцианаты и особенно толуол-диизоцианат-толуол TD1, высокомолекулярные спирты (простые и сложные и полиэфиры), амины MDA и МОСА, силиконы SI в соответствии с ISO 1043-1, силикон-полисилоксан SI, фенопласты PF (фенол-формальдегид) и особенно PF2E1, PF2C1, PF2C3, PF2A1-2A2, PF1A-1A2, PF2DA, PF2D4, аминопласты (меламинформальдегид MF, формальдегид-мочевины UF), в соответствии с ISO 4614 и 1043-1, меламинформальдегид MF, формальдегид мочевины UF, термоотверждающиеся ненасыщенные сложные полиэфиры.
В целом надо заметить, что всякий раз, когда возможно и требуется, эти материалы можно армировать, в частности, с помощью следующих материалов: ароматический полиамид (Kevlar© от Dupont de Nemours), стекло во всех его формах, включая форму натриевого кремния, высокомодульный углерод, высокопрочный углерод, бор, сталь, слюда, волластонит, карбонат кальция, тальк, политетрафторэтилен PTFE, например, Teflon©.
Кроме того, обработанные продукты из пластика могут быть покрыты или не покрыты минералами, синтетическими или металлическими пленками.
Способ согласно изобретению также применяется к обработке наиболее чистых металлов и их сплавов. Можно отметить в особенности твердые металлические сплавы, сталь и литье из алюминия, никеля или хрома, молибдена, вольфрама или марганца, золота, платины или серебра, титана или кобальта, бора или ниобия, тантала, а также чистые металлы.
Многие минералы, включая кварц, также могут быть обработаны с использованием этого способа. Наконец, он также адаптируется для обработки композитных материалов, т.е. материалов с матрицей/органическими или металлическими связующими материалами, включая в особенности (что не является исчерпывающим): фенолы, сложные полиэфиры, эпоксидные смолы, полиимиды, армированные волокна/дополнительные армирующие структуры (главным образом, целлюлоза, стекло Е, С, S, R, бор), трихиты, (нитевидные кристаллы) Al2O3, SiO2, ZrO2, MgO, TiO2, BeO, SiC, низкомодульный арамид, высокомодульный арамид, высокопрочный углерод, высокомодульный углерод, бор, сталь, алюминий, и т.п., а также материалы с наполнением из минеральных материалов, в частности, мела, кварца, каолина, оксида титана, шариков из твердого стекла и т.п.
Эти композиты могут содержать добавки, особенно, катализаторы или ускорители и, в твердом состоянии, могут быть в однослойной и многослойной форме, в виде сэндвича и т.п.
Особо следует отметить следующие композиты (список не является исчерпывающим): алюминий/медь - металлический матричный композит Al 77,9/ SiC 17,8/ Cu 3,3/ Mg 1,2/ Mn 0,4; алюминий/литий металлический матричный композит Al 81/ SiC 15/ Li 2/ Cu 1,2/ Mg 0,8; углерод/виниловый сложный эфир углеродное волокно - матрица из винилового сложного эфира; углерод/полиарамид - углеродное волокно - полиарамидное волокно; углерод/углеродный композит - углеродное волокно - углеродная матрица; углерод/композит эпоксидной смолы - углеродное волокно матрица из эпоксидной смолы; углерод/полиэфирэфиркетонный композит - углеродное волокно - матрица PEEK; полиарамид/композит на основе винилового сложного эфира - полиарамидное волокно - матрица из винилового сложного эфира; полиэтилен/композит полиэтилена - волокно полиэтилена - матрица на основе полиэтилена; Е-стекло/эпоксидная смола боросиликатное стекло/эпоксидная смола; полиарамид/полифениленсульфид - полиарамидное волокно - матрица PPS.
Наконец, с помощью способа по изобретению может быть обработано множество керамик. Керамики составляются из необработанных материалов, которые могут быть натуральными поликристаллическими, или полифазными, или даже синтетическими материалами типа фриттованной окиси алюминия, кварца, алюмосиликатных или магний-силикатных композитов (кордерит, муллит, стеатит) и более широко встречающихся оксинитридов, сиалона, карбидов… Предпочтительными материалами являются короткие монокристаллические волокна, рассредоточенные внутри органической, металлической или керамической матрицы, а также металлические карбидные нитевидные кристаллы, а также металлоорганические предшественники, такие, как SiC или Si3N4. Эти материалы могут использоваться посредством сухого прессования, термопластического плавления, ленточного литья и т.п.
Мы отмечаем, как основные керамики (что не является исчерпывающим) окись алюминия Al2O3, окись алюминия/кварц Al2O3 80/SiO2 20, окись алюминия/кварц Al2O3 96/SiO2 4 - Saffil®, окись алюминия/кварц/оксид бора Al2O3 70/SiO3 38/В2О 2, окись алюминия/кварц/оксид бора Al2O3 62/SiO2 24/B2O 14, алюмосиликат калия Muscovite Mica, карбид бора В4С, карбид кремния SiC, реакционно-связанный карбид кремния SiC, горячепрессованный карбид кремния SiC, вольфрам/карбид кобальта WC 94/Со 6, обработанная стеклокерамика SiO2 46/Al2O3 16/MgO 17/K2O 10/
В2О3 7, проницаемая керамика SiO2 50/ZrSiC 40/Al2O3 10, диборид титана TiB2, диоксид титана TiO2 99,6%, оксид магния MgO, нитрид алюминия AlN, обработанный нитрид алюминия Shapal-M®, нитрид алюминия, нитрид бора BN, нитрид кремния Si3N4, реакционно-связанный нитрид кремния Si3N4, полученный горячим прессованием нитрид кремния Si3N4, нитрид кремния/нитрид алюминия/окись алюминия, сиалоновое стекло, оксид цинка/окись алюминия ZnO 98/Al2O3 2, оксид иттрия Y2O3, оксид бериллия ВеО 99,5, расплавленный кварц SiO2, рубин Al2O3/Cr2O3/Si2O3, сапфир Al2O3 99,9, силикат окиси алюминия SiO2 53/Al2O3 47, кварц SiO2 96, алюмосиликатное стекло - алюмосиликат SiO2 57/Al2O3 36/СаО/MgO/ВаО, нестабилизированный цирконий ZrO2 99, стабилизированный окисью иттрия цирконий ZrO2/Y2O3, стабилизированный окисью магния цирконий ZrO2/MgO и т.п.
Благодаря очень локализованному нагреву вещества использование лазера с ультракоротким импульсом позволяет:
- в пластичных материалах производить срез без теплового разрушения в зоне среза;
- в композитных материалах осуществлять прямой срез без расслоения многослойного материала,
- обрабатывать все металлы без обтачки, или выравнивания заподлицо, или даже раскатывания уровня поверхности, на которую попадает излучение.
Список позиций
10 - обрабатываемый компонент, например, элемент передачи, такой как приводной ремень
11 - рабочая поверхность
12 - удерживающее средство (крепежное средство)
13 - информационный процессор для реализации трехмерной моделирующей программы
14 - фемтолазер
15 - оптическая головка
16 - лазерный пучок
17 - информационный процессор для реализации программы обработки
X, Y, Z - оси переноса обрабатываемого компонента А, В, С - оси вращения обрабатываемого компонента
20 - приводной ремень
21 - направляющий шкив натяжного ремня
22 - дополнительный шкив
23 - главный шкив
30 - криволинейная зубчатая передача
50 - многослойный приводной ремень
51 - усиление
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЛНЕЧНЫЙ ЭЛЕМЕНТ И СПОСОБ И СИСТЕМА ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2467851C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ РЕЛЬЕФНОЙ ПОВЕРХНОСТИ НА СТАЛЬНОМ ТИСНИЛЬНОМ ВАЛЕ | 2012 |
|
RU2614502C2 |
| ПОКРЫТИЕ ИЗ НИТРИДА УГЛЕРОДА И ИЗДЕЛИЕ С ТАКИМ ПОКРЫТИЕМ | 2007 |
|
RU2467850C2 |
| СПОСОБ СОЗДАНИЯ ВЫСОКОАСПЕКТНЫХ ПРОТЯЖЕННЫХ СТРУКТУР С ДИАМЕТРАМИ СУБМИКРОННЫХ РАЗМЕРОВ В ДИЭЛЕКТРИЧЕСКОМ КРИСТАЛЛЕ ФЕМТОСЕКУНДНЫМИ РЕНТГЕНОВСКИМИ ИМПУЛЬСАМИ | 2023 |
|
RU2815615C1 |
| СПОСОБ ФОРМИРОВАНИЯ МИКРОСТРУКТУРИРОВАННОГО И ВЫСОКОДОПИРОВАННОГО СЛОЯ НА ПОВЕРХНОСТИ КРЕМНИЯ | 2013 |
|
RU2550868C2 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ И МЕТАЛЛИЧЕСКОЕ ИЗДЕЛИЕ, СНАБЖЕННОЕ ПОКРЫТИЕМ | 2007 |
|
RU2467092C2 |
| ЗУБЧАТЫЙ РЕМЕНЬ И ПРИМЕНЕНИЕ ЗУБЧАТОГО РЕМНЯ В МАСЛЕ | 2009 |
|
RU2521449C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УДАЛЕНИЯ ЭПИТЕЛИЯ | 2011 |
|
RU2601103C2 |
| СПОСОБ ПОЛУЧЕНИЯ ГРАФЕНА | 2015 |
|
RU2572325C1 |
| СПОСОБ ЛАЗЕРНОЙ ОБРАБОТКИ ДЛЯ РАЗДЕЛЕНИЯ ИЛИ СКРАЙБИРОВАНИЯ ПОДЛОЖКИ ПУТЕМ ФОРМИРОВАНИЯ КЛИНОВИДНЫХ ПОВРЕЖДЕННЫХ СТРУКТУР | 2014 |
|
RU2674916C2 |



Изобретение относится к способу изготовления микромеханических или наномеханических компонентов и может быть использовано в области производства настенных/наручных часов или других измерительных устройств оптоэлектроники. Способ изготовления микромеханического или наномеханического компонента в виде приводного ремня или микроформы приводного ремня часов включает лазерную абляцию указанного приводного ремня или микроформы, указанного приводного ремня, с импульсами длительностью менее 5×10-13 секунд и с мощностью более 1012 ватт. Обрабатываемый компонент предварительно моделируется в трех направлениях, и указанная трехмерная модель используется для получения программы обработки. Изобретение обеспечивает высокую точность изготовленных компонентов. 2 н. и 9 з.п. ф-лы, 5 ил.
1. Способ изготовления микромеханического или наномеханического компонента в виде приводного ремня или микроформы приводного ремня часов, включающий лазерную абляцию указанного приводного ремня или микроформы, указанного приводного ремня с импульсами длительностью менее 5×10-13 с и с мощностью более 1012 Вт.
2. Способ по п.1, в котором лазерной абляцией воздействуют на компонент с, по меньшей мере, одним размером, меньшим или равным двум миллиметрам или предпочтительно меньшим, чем 0,5 мм, который пересчитывают и определяют как длину сегмента, соединяющего две наиболее удаленные точки компонента вдоль одного и того же направления.
3. Способ по одному из пп.1 или 2, в котором указанный компонент содержит зубцы, глубина которых составляет менее двух миллиметров.
4. Способ по п.1, который дополнительно включает следующие этапы перед обработкой компонента с помощью импульсного лазера: описание форм, подлежащих обработке, передачу данных, соответствующих указанному описанию, на программное обеспечение обработки, причем указанное программное обеспечение обработки предпочтительно особо принимает во внимание интерполяции криволинейных поверхностей, определение угла падения пучка и положения обрабатываемого компонента по отношению к лазерному пучку в соответствии с материалом и глубиной обработки таким образом, чтобы оптимизировать условия абляции, введение данных в информационный процессор контроля и/или управления перемещением, юстировку лазера с ультракороткими импульсами, имеющими длительность менее 5×10-13 с и мощность более чем 1012 Вт, и начало программы обработки.
5. Способ по п.1, в котором градиент энергии лазерного пучка определяют, обеспечивая интенсивность центральной зоны, сечение которой составляет менее 50% полного сечения лазерного пучка, больше, чем абляционный порог материала.
6. Способ по п.1, в котором абляцию осуществляют только в фокальной плоскости лазерного пучка, при этом осуществляют этап перемещения указанной фокальной плоскости относительно указанного компонента в направлении, перпендикулярном указанному лазерному пучку.
7. Способ по п.1, в котором энергию и длительность импульсов выбирают в зависимости от материала компонента для обеспечения абляции нескольких мкм материала, предпочтительно менее чем 10 мкм, на импульс.
8. Способ по п.1, в котором используют дифракционное устройство для лазерного пучка.
9. Способ по п.4, в котором указанное описание обрабатываемых форм осуществляют на основе геометрии, определяемой на плане системы автоматизированного проектирования (САПР) в трехмерных координатах, причем обработку шага определяют в соответствии с материалом и глубиной обработки так, чтобы можно было оптимизировать условия абляции, причем фокальную область располагают в зависимости от освещения с помощью оптической головки или оптической головки, оборудованной дифракционным устройством.
10. Приводной ремень, предназначенный для изготовления часов, имеющий зубцы, расположенные в пространстве в соответствии с шагом менее чем два миллиметра, и/или глубина которых составляет менее двух миллиметров, выполненный в соответствии со способом по одному из пп.1-9.
11. Приводной ремень по п.10, отличающийся тем, что он имеет криволинейный зубчатый профиль в виде, по меньшей мере, одной кривой, по меньшей мере, с одним радиусом, большим 10-9 м и меньшим, чем 5 мм.
| US 6621040 B1, 16.09.2003 | |||
| Автоматический регулятор амплитуды колебаний баланса часовых механизмов | 1950 |
|
SU91865A2 |
| ПРУЖИННЫЙ АККУМУЛЯТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 1999 |
|
RU2159657C1 |
| DE 19835894 A1, 25.02.1999 | |||
| GB 1417238 A, 10.12.1975 | |||
| Устройство для счета изделий,переносимых конвейером | 1984 |
|
SU1233195A1 |
| JP 58221688 A, 23.12.1983. | |||

