Область техники
Изобретение относится к авиастроению, в частности, к вертолетостроению, а именно, к комбинированным вертолетам вертикального взлета и посадки с двумя и более винтами, в том числе, размещенными коаксиально.
Предшествующий уровень техники
Проблемы повышения безопасности, маневренности, скорости полета и надежности управления летательным аппаратом рассматриваются как основные при конструировании вертолетов.
Известен вертолет с соосными несущими винтами (РФ 2265554, 01.04.2004) и системой управления, включающей два автомата перекоса и кинематически связанные с ними две рычажные качалки управления углом установки лопастей.
Известен вертолет с соосными несущими винтами (РФ 176027, 18.07.2016) с диаметром верхнего винта меньшим диаметра нижнего винта для предотвращения перехлеста лопастей, и управлением общим и дифференциальными шагами лопастей через автомат перекоса.
Известна соосная система несущих винтов вертолета (РФ 173218, 14.11.2016) с системой управления, содержащей автомат перекоса и устройство управления дифференциальным шагом установки лопастей несущих винтов.
Известен концепт скоростного винтокрыла (РФ 2539679, 19.11.2013) с одним большим верхним несущим винтом, двумя дополнительными воздушными винтами в складывающихся крыльях и винтом в кольце на конце хвостовой балки. Дополнительные винты могут поворачиваться из горизонтальной плоскости при взлете/посадке в вертикальную плоскость при горизонтальном полете по типу конвертоплана. Недостатком предложенного концепта является повышенная сложность управления летательным аппаратом посредством воздушных винтов при переходе из режима взлет-посадка в горизонтальный полет и обратно.
В патенте US 10822076 (03.11.2020) был предложен двухроторный винтокрылый летательный аппарат, имеющий два соосных несущих винта с механизмами перекоса и толкающий винт в хвостовой части. Дополнительный толкающий винт обеспечивает повышение круизной скорости летательному аппарату, однако остается конструктивно и технологически сложный узел редуктора и автомата перекоса несущих винтов. Этот патент может рассматриваться в качестве прототипа заявляемому нами решению.
Недостатками указанных выше технических решений являются чрезмерная сложность механизмов автомата перекоса несущих винтов, трансмиссии несущих винтов и ограниченные возможности маневрирования и достижения высоких круизных скоростей при полете. Техническая сложность механизмов автоматов перекоса заключается в необходимости циклического управления положением лопастей соосных несущих винтов при монтаже втулок несущего винта с лопастями и тарелкой автомата перекоса на вращающейся оси, при этом ось приводится двигателем через редуктор, установленный в фюзеляже вертолета.
Одной из возможностей преодоления указанных выше проблем повышения управляемости и круизной скорости винтокрылых летательных аппаратов является разработка скоростных комбинированных (гибридных) вертолетов, использующих дополнительные воздушные винты и расположением электродвигателей и редуктора непосредственно под или над несущим винтом, в таком случае возможно использовать неподвижную мачту для крепления независимых винтомоторных групп несущих винтов с расположением системы управления качалкой автомата перекоса внутри неподвижной мачты.
Краткое описание чертежей
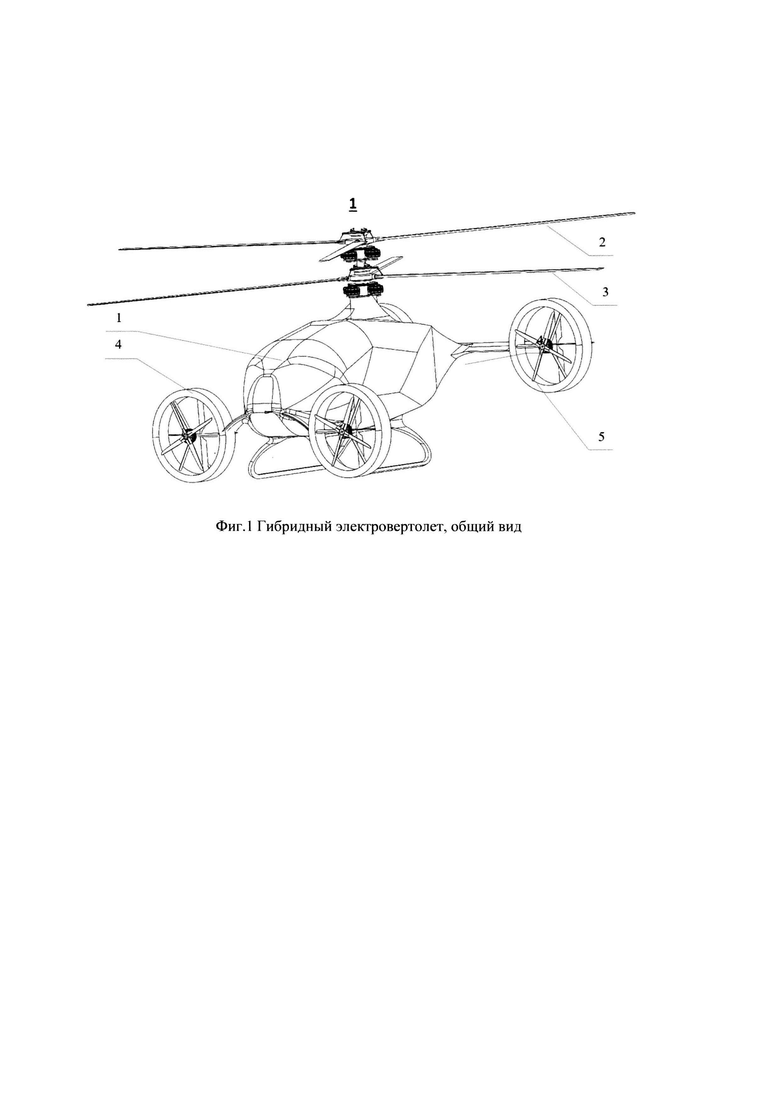
Фиг. 1 Гибридный электровертолет, общий вид.
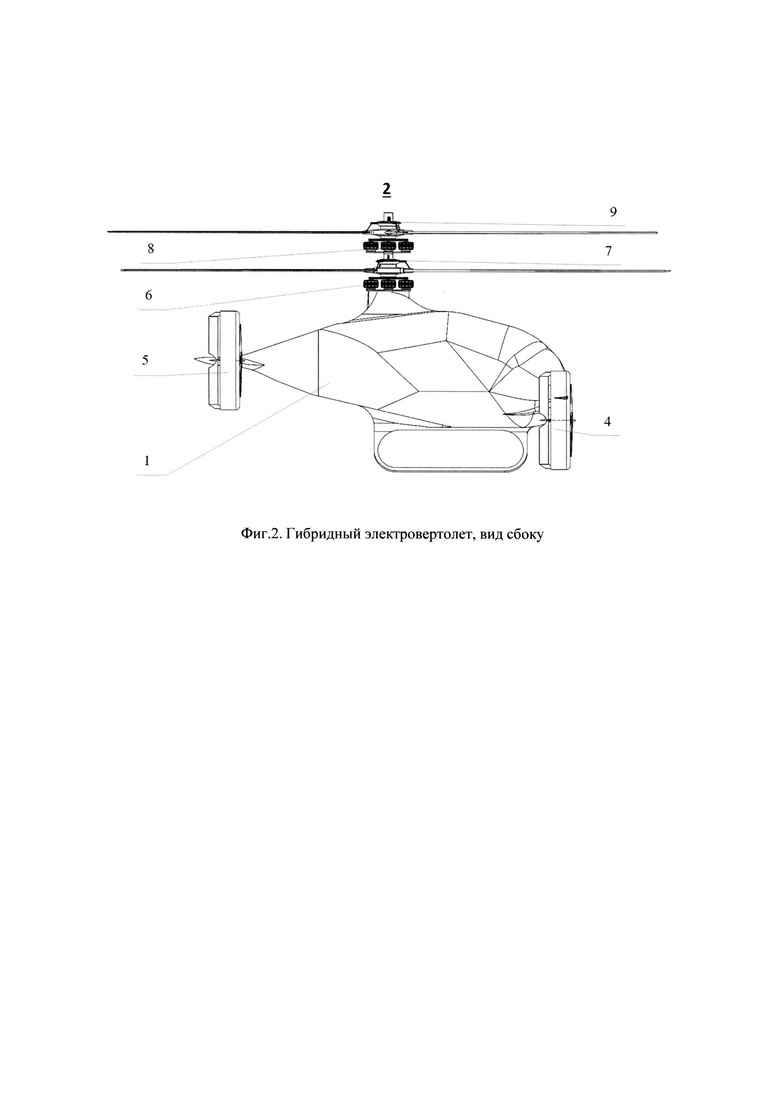
Фиг. 2. Гибридный электровертолет, вид сбоку.
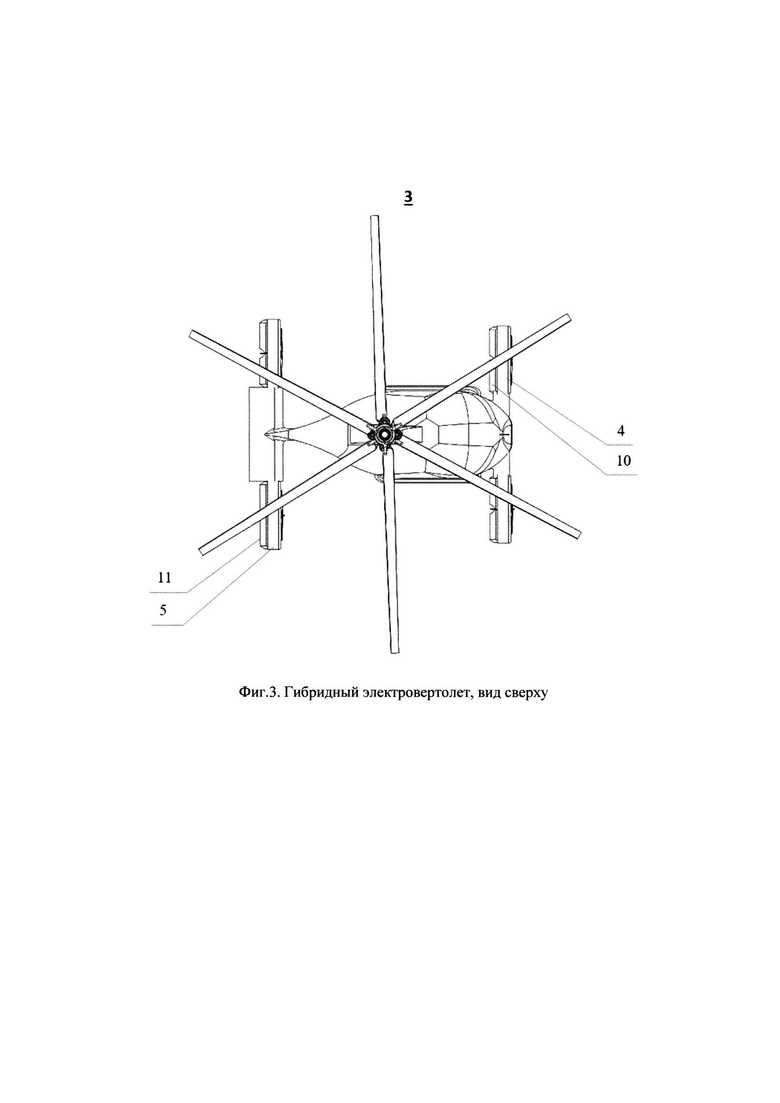
Фиг. З. Гибридный электровертолет, вид сверху.
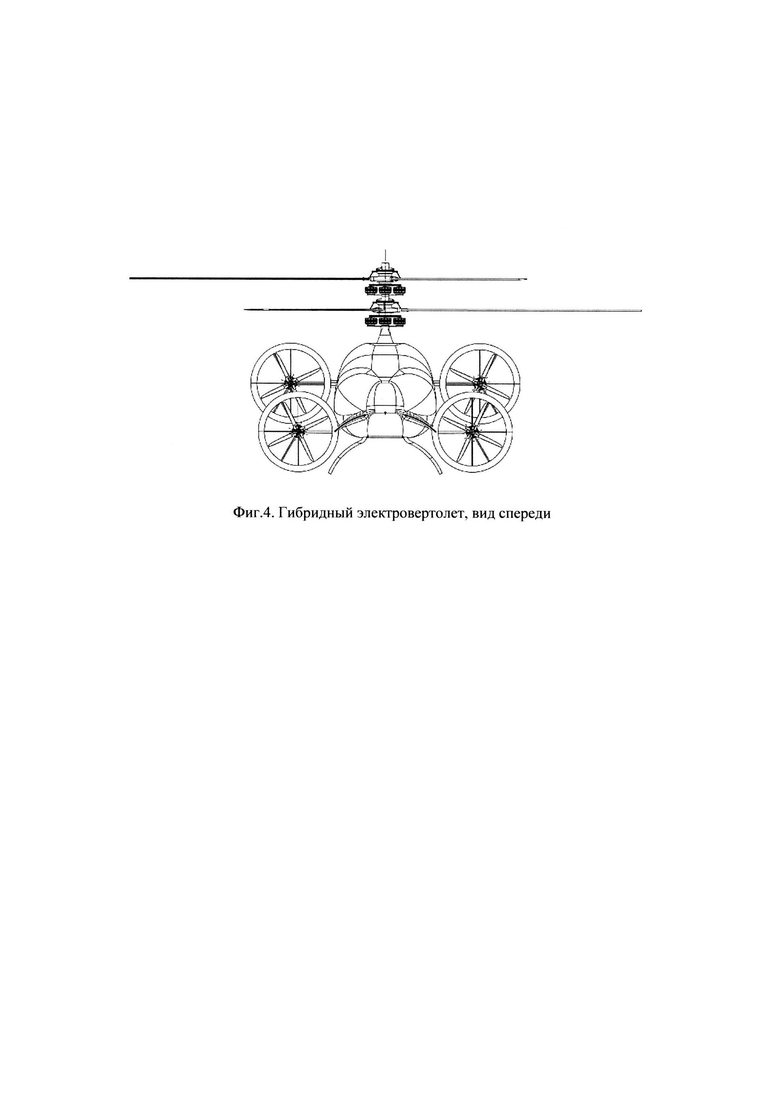
Фиг. 4. Гибридный электровертолет, вид спереди.
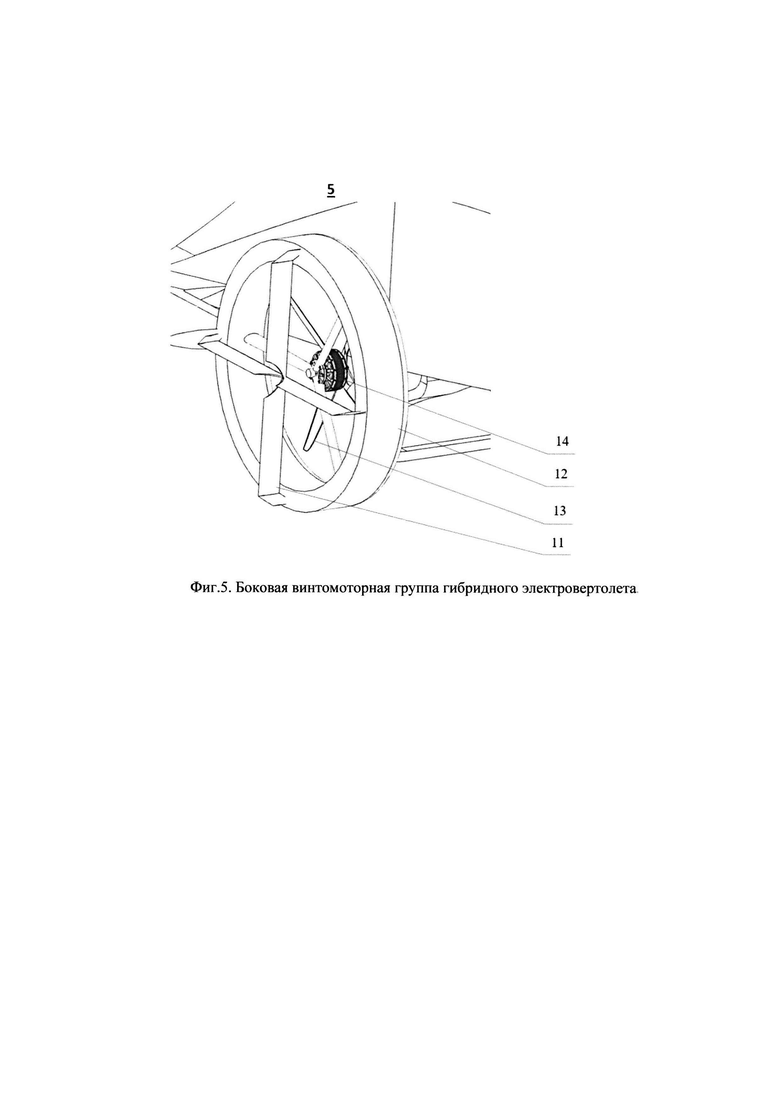
Фиг. 5. Боковая винтомоторная группа гибридного электровертолета.
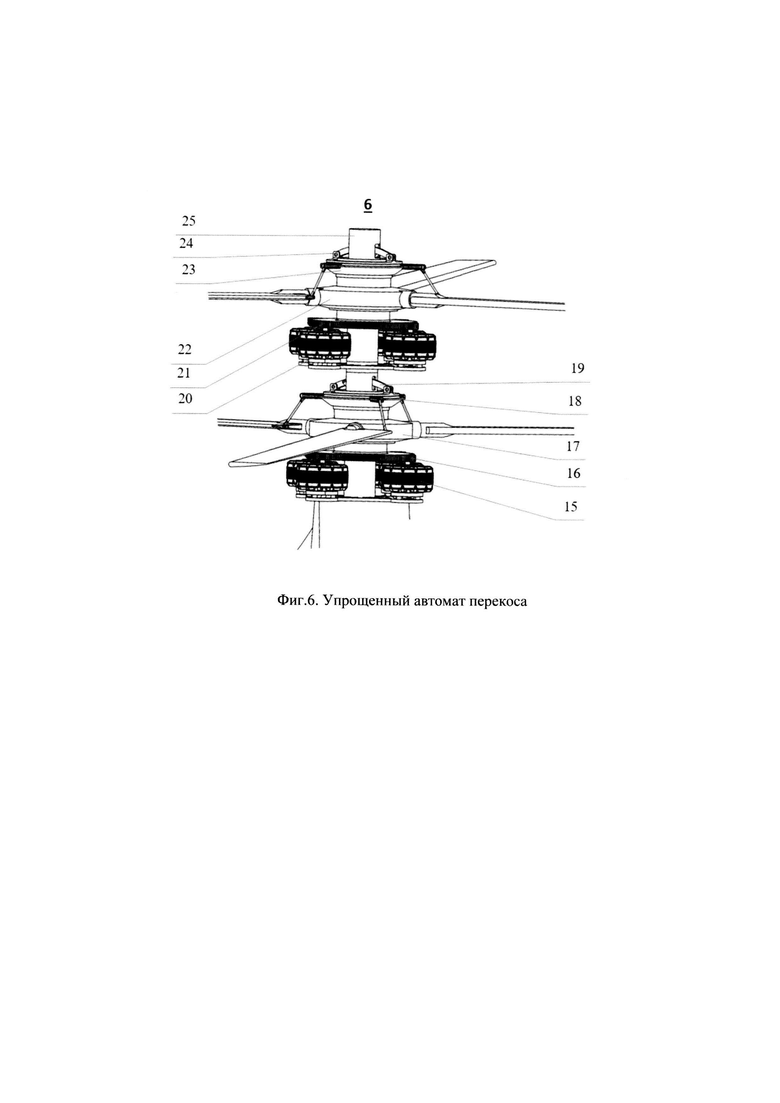
Фиг. 6. Упрощенный автомат перекоса.
Раскрытие сущности изобретения
Комбинированный электровертолет содержит фюзеляж, включающий кабину экипажа, два соосных несущих винта противоположного вращения с независимым приводом, на каждом из которых установлена втулка несущего винта с двух- или трехлопастным винтом, упрощенный автомат перекоса с одной качалкой управления. На фюзеляже установлено не менее четырех боковых винтомоторных групп.
Технической задачей изобретения является создание винтокрылого летательного аппарата вертикального взлета и посадки, обладающего повышенными характеристиками надежности, управляемости, маневренности и круизной скорости по сравнению с аналогами.
Решение технической задачи состоит в совместном использовании для обеспечения полета соосных несущих винтов со встречным вращением в горизонтальных плоскостях и боковых толкающих (и/или тянущих) винтов, вращающихся вокруг поперечной оси. Обе группы винтов, а именно, несущие и боковые, имеют собственные контуры управления, позволяющие независимо управлять вертикальным и горизонтальным перемещениями гибридного вертолета в полете, соответственно.
Использование соосных несущих винтов только с целью создания подъемной силы для движения гибридного электровертолета в вертикальном направлении, позволяет упростить механизм автомата перекоса и ограничиться использованием следующих функций автомата перекоса: независимое изменение общего шага верхнего и нижнего винта, независимый наклон тарелки автомата перекоса вокруг только поперечной оси. В этом техническом решении упрощение конструкции механизма автомата перекоса заключается в упрощении кинематической схемы: уменьшении функций (вместо одновременного наклона тарелки автомата перекоса по 2 м осям, используется наклон вокруг одной оси) и расположения качалки автомата перекоса на неподвижной мачте. Привод качалок автоматов перекоса расположен внутри полой мачты. Автоматы перекоса независимы, кинематически не соединены между собой тягами.
Технический результат заключается в существенном повышении надежности, управляемости и маневренности гибридного электровертолета за счет упрощения его технической реализации в результате упрощения механизмов автомата перекоса и расширения их функций за счет независимого управления автоматами перекоса нижнего и верхнего винта и дополнительными независимыми системами управления полетом в вертикальной и в горизонтальной плоскостях при совместном использовании несущих и боковых винтомоторных групп. Существенное повышение круизной скорости гибридного электровертолета также достигается за счет использования боковых (тянущих/толкающих) винтомоторных групп.
Существенные отличия предлагаемого решения от прототипа заключаются в следующем:
- все винты приводятся во вращения электродвигателями;
- электродвигатели и редуктора верхнего и нижнего винта располагаются на неподвижной мачте в непосредственной близости от втулки винта;
- существенное упрощение и облегчение трансмиссии привода несущих винтов;
- достигается упрощение управления несущими винтами за счет упрощения конструкции автомата перекоса винтов и реализации независимого автомата перекоса для верхнего и нижнего винта;
- достигается расширение возможностей управление несущими винтами за счет возможности независимой регулировки оборотов, общего шага и циклического шага (по одной оси) верхнего и нижнего винта;
- функции, выполняемые автоматом перекоса основных несущих винтов и толкающего винта, берут на себя четыре поворотных винта в импеллере;
- достигается упрощение конструкции и повышения надежности за счет отказа от трансмиссии на несущие, рулевые и толкающие винты;
- соосные винты имеют независимый привод за счет редукторов с электродвигателями, расположенными непосредственно под каждым соосным несущим винтом.
Конструкция заявляемого скоростного гибридного соосного электровертолета представлена на Фиг. 1-5.
На Фиг. 1 показан общий вид предлагаемого скоростного гибридного соосного электровертолета. Конструкция летательного аппарата включает фюзеляж (1), соосные верхний (2) и нижний (3) несущие винты, передние боковые винты в импеллере с поворотным механизмом на 110° (4), задние боковые винты в импеллере с поворотным механизмом на 110° (5). Общий вид гибридного электровертолета содержит основные элементы заявляемого летательного аппарата и отражает его облик в одном из возможных дизайнов, который не исключает исполнения гибридного электровертолета в каком-либо ином дизайне.
На Фиг. 2. схематически изображен вид гибридного электровертолета сбоку и показаны основные элементы заявляемого летательного аппарата: фюзеляж (1), передние боковые винты в импеллере с поворотным механизмом на 110° (4), задние боковые винты в импеллере с поворотным механизмом на 110° (5), электродвигатель нижнего винта с редуктором (6), электродвигатель нижнего винта с редуктором (7), упрощенный автомат перекоса нижнего винта (8), упрощенный автомат перекоса верхнего винта (9).
На Фиг. 3. изображен вид заявляемого гибридного электровертолета сверху и показано взаимное расположение передних (4) и задних (5) боковых винто-моторных групп (далее ВМГ) с поворотным механизмом и рулевые поверхности, расположенные в потоке передних (10) ВМГ, рулевые поверхности, расположенные в потоке задних (11) ВМГ, обеспечивающие управление по крену и тангажу ЛА.
На Фиг. 4 представлены виды заявляемого гибридного электровертолета спереди.
На Фиг. 5 схематически изображены задняя боковая винтомоторная группа, состоящая из: рулевые поверхности в потоке задних боковых винтов (11), кольцо импеллера (12), воздушный винт (13), электропривод воздушного винта (14).
На Фиг. 6 схематически изображена конструкция привода несущих винтов включающая: электродвигатели нижнего (15) и верхнего (20) винтов, редуктора нижнего (16) и верхнего (21) винтов, втулки нижнего (17) и верхнего (22) винтов, тарелки автомата перекоса нижнего (18) и верхнего (23) винтов, привода тарелок автомата перекоса нижнего (19) и верхнего (24) винтов и неподвижная мачта крепления агрегатов соосных винтов (25).
Предлагаемая конструкция вертолета работает следующим образом. Гибридный вертолет является беспилотным, система автоматического управления полетом (СУ) независимо управляет группой электродвигателей на редукторе 6 и 7, которые приводят во вращение нижний 3 и верхний 2 трехлопастной несущий винт. Управление общим шагом и циклическим шагом по одному каналу управления несущих винтов 3 и 2 осуществляется СУ через актуаторы с электроприводом. Суммарно СУ соосными несущими винтами имеет 6 каналов управления (обороты, общий шаг и циклический шаг верхнего и нижнего винтов.
На предлагаемой конструкции гибридного электровертолета независимые механизмы привода несущих винтов (электромоторы 15 и 20, редуктора 16 и 21, втулки 17 и 22, тарелки автоматов перекоса 18 и 23) собраны на неподвижной полой мачте 25. Внутри полой мачты размещена независимая система управления общим и циклическим шагом винтов и расположено силовое и управляющее питание к электроприводам винтов. Данное решение стало возможным в результате размещения электропривода несущих винтов в непосредственной близости от винтов, данное решение позволяет отказаться от сложной и тяжелой трансмиссии на несущие винты вертолета.
Угловые скорости вращения и шаг верхнего и нижнего несущих винтов могут быть различны, в этом случае реактивные моменты несущих винтов 2 и 3 можно компенсировать с помощью независимой регулировки шага винтов 8 и 9.
При взлете/посадке вертикальное и путевое управление осуществляется за счет несущих винтов, по крену и тангажу осуществляется за счет различной тяги боковых винтомоторных групп 4 и 5, при этом оси боковых ВМГ развернуты вертикально, по продольному и поперечному перемещению за счет отклонения аэродинамических рулевых поверхностей на боковых ВМГ. Боковые ВМГ имеют возможность бесступенчатого поворота из горизонтального (полетного) положения в вертикальное (взлетное). При переходе в горизонтальный полет (боковые ВМГ бесступенчато поворачиваются в горизонтальное положение, управление по крену и тангажу, осуществляется с помощью аэродинамических рулей 10 и 11, установленных в потоке воздуха от боковых ВМГ.
При горизонтальном полете вертикальное и путевое управление осуществляется за счет несущих винтов, по крену и тангажу осуществляется за счет отклонения аэродинамических рулей на боковых ВМГ, продольное управление скоростью полета осуществляется за счет тяги боковых ВМГ.
Предлагаемое изобретение позволяет упростить конструкцию соосного винта вертолета, улучшить летно-технические характеристики в горизонтальном полете, увеличить надежность исполнительных механизмов управления вертолетом, а также снизить затраты в процессе изготовления вертолета.
Положительный результат достигается за счет разделения контуров управления между основными соосными несущими винтами 2 и 3 и боковыми ВМГ 4 и 5. Основные несущие винты 2 и 3 обеспечивает вертикальное и путевое управление за счет изменения общего шага и возможности раздельного управления скоростями вращения соосных винтов. Управление по крену и тангажу, а также управление горизонтальной скоростью осуществляется за счет боковых ВМГ 4 и 5. Угловая скорость, общий и циклический шаг верхнего 2 и нижнего 3 винта регулируется системой управления вертолетом независимо, что дает увеличение эффективности соосного воздушного винта во всем диапазоне вертикальных и горизонтальных скоростей полета. В результате раздельного управления скоростями вращения винтов, общим и циклическим шагом система управления летательным аппаратом получает широкие возможности по балансировке и управлению реактивным моментом обоих несущих винтов, что предотвращает самопроизвольное вращение вертолета вокруг оси несущих винтов и эффективное управление по курсу.
При аварийной посадке достигается увеличение безопасности за счет независимого управления несущими винтами 2 и 3 и боковыми ВМГ 4 и 5, при отказе одного или нескольких компонентов ВМГ обеспечивается безопасное управляемое снижение и посадка. При отказе силового электропитания посадка осуществляется за счет авторотации, питание приводов автоматов перекоса 8 и 9 осуществляется от резервированной системы питания.
Энергетическая система гибридного скоростного вертолета может быть реализована на одном из следующих источников питания: АКБ, гибридные силовые установки на основе бензиновых двигателей внутреннего сгорания с установленными на них генераторами, энергетическая систем на основе электрохимического генератора на топливных элементах.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
Скоростной гибридный соосный электровертолет содержит фюзеляж, соосные несущие винты с расположенными под ними электромоторами и упрощенными независимыми автоматами перекоса, боковые винтомоторные группы. Обеспечивается повышение управляемости и круизной скорости винтокрылых летательных аппаратов. 8 з.п. ф-лы, 6 ил.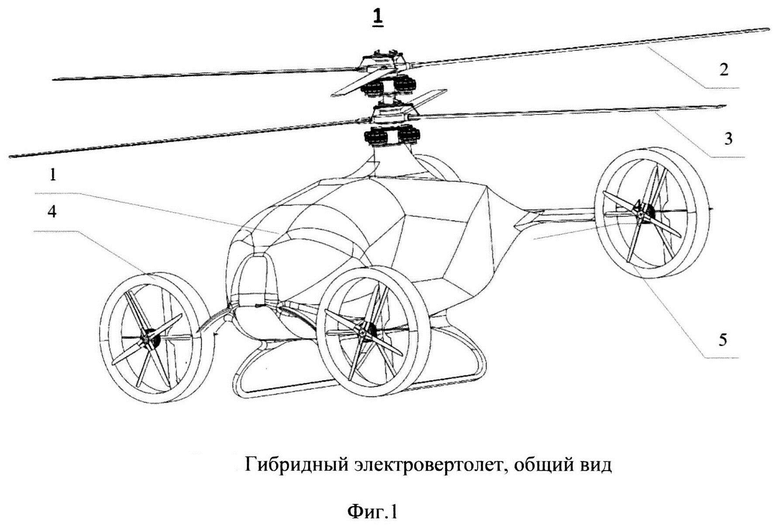
1. Скоростной гибридный соосный электровертолет, включающий фюзеляж, соосные несущие винты с расположенными под ними электромоторами и упрощенными независимыми автоматами перекоса, с наклоном тарелки только вокруг одной поперечной оси, несущих винтов, а также боковые винтомоторные группы, отличающийся тем, что автоматы перекоса совместно с приводом несущих винтов обеспечивают только вертикальное и путевое управление, а управление скоростью полета по крену и тангажу осуществляется боковыми винтомоторыми группами.
2. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что электродвигатели и редукторы привода несущих винтов располагаются на неподвижной полой мачте в непосредственной близости от втулок несущих винтов.
3. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что боковые винты расположены в кольцевых импеллерах с установленными на них рулевыми закрылками.
4. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что боковые винтомоторные группы могут поворачиваться из вертикального в горизонтальное положение по типу конвертоплана.
5. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что для управления несущими соосными винтами выделено 6 независимых каналов управления (обороты нижнего и верхнего винта, общий шаг верхнего и нижнего винта, циклический шаг верхнего и нижнего винта).
6. Скоростной гибридный соосный электровертолет по п. 1, отличающийся следующими летно-техническими характеристиками: взлетная масса 600-800 кг, расчетная крейсерская скорость полета - 220 км/ч, расчетная максимальная скорость полета - 350 км/ч, полезная нагрузка - 250 кг, потребляемая мощность на крейсерском режиме - 96 кВт.
7. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что одним из вариантов энергообеспечение является питание от аккумуляторных батарей суммарной емкостью около 40 кВтч, что обеспечивает практическую дальность около 80 км.
8. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что одним из вариантов энергообеспечения является питание от бензиновой гибридной силовой установки суммарной мощностью генераторов 120 кВт и запасом топлива массой 70 кг, что обеспечивает практическую дальность полета около 400 км.
9. Скоростной гибридный соосный электровертолет по п. 1, отличающийся тем, что одним из вариантов энергообеспечения является питание от электрохимического генератора на топливных элементах максимальной мощностью 120 кВт с запасом водорода, обеспечивающим практическую дальность 160 км.
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВРАЩАЮЩЕЙСЯ НЕСУЩЕЙ ПОВЕРХНОСТЬЮ | 2012 |
|
RU2522373C2 |
| Топливная центрифуга | 1961 |
|
SU145089A1 |
| ПРЕОБРАЗУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ) | 2014 |
|
RU2550589C1 |
| US 20170305548 A1, 26.10.2017 | |||
| FR 2980771 B1, 31.10.2014. | |||

