Область техники, к которой относится изобретение
Варианты осуществления, описанные ниже, относятся к верификации узлов датчиков в виброметре, а более конкретно, к использованию сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Уровень техники
Виброметры, такие как, например, кориолисовы массовые расходомеры, измерители плотности жидкости, измерители плотности газа, измерители вязкости жидкости, измерители удельной плотности газа/жидкости, измерители относительной плотности газа/жидкости и измерители молекулярного веса газа, являются общеизвестными и используются для измерения параметров текучих сред. В общем, виброметры содержат узел датчиков и электронные схемы измерителя. Узел датчиков может функционально соединяться с электронными схемами измерителя и предоставлять сигналы датчиков в электронные схемы измерителя. Узел датчиков может включать в себя трубопроводы, выполненные с возможностью вибрировать в ответ на движущую силу, налагаемую посредством актуатора, который принимает возбуждающий сигнал из электронных схем измерителя. Актуатор может называться "формирователем сигналов управления".
Когда трубопроводы используются в узле датчиков, трубопроводы могут заполняться материалом, имеющим свойства, которые должны измеряться. Материал в трубопроводе или трубопроводах узла датчиков может быть протекающим или стационарным. Узел датчиков может использоваться для того, чтобы измерять один или более параметров текучей среды, таких как массовый расход, плотность или другие свойства материала в узле датчиков. Более конкретно, могут быть предусмотрены один или более измерительных преобразователей, прикрепленных к трубопроводу или трубопроводам, выполненных с возможностью преобразовывать колебательное движение в сигналы датчиков. Эти измерительные преобразователи могут называться "измерительными тензодатчиками". Измерительные тензодатчики типично находятся во впускных и выпускных участках трубопровода или трубопроводов.
Как отмечено выше, виброметр может представлять собой кориолисов расходомер. Кориолисов расходомер включает в себя один или более трубопроводов, которые соединяются в линию в системе труб или другой транспортной системе и транспортируют материал, например, текучие среды, суспензии и т.п., в системе. Каждый трубопровод может рассматриваться как имеющий набор мод естественных вибраций, в том числе, но не только, простую изгибную, крутильную, радиальную и связанную моды. В варианте применения для измерения кориолисова расхода, трубопровод возбуждается в одной или более мод вибраций по мере того, как материал протекает через трубопровод, и движение трубопровода измеряется в точках, разнесенных вдоль трубопровода. В ходе протекания, вибрационная трубка и протекающая масса соединяются между собой вследствие кориолисовых сил, вызывая разность фаз в вибрации между концами трубки. Разность фаз может быть прямо пропорциональной массовому расходу и может измеряться в качестве разности фаз между двумя сигналами датчиков, предоставленными посредством измерительных тензодатчиков.
Например, массовый расход материала может быть пропорциональным разности фаз или временной задержке между двумя сигналами датчиков, причем временная задержка может содержать разность фаз, деленную на частоту. Массовый расход в силу этого может определяться, например, посредством умножения временной задержки на константу пропорциональности или коэффициент калибровки, который может называться "коэффициентом калибровки расхода (FCF)". FCF может отражать свойства материала и механические свойства расходомерной трубки. FCF может определяться посредством процесса калибровки до установки расходомера в систему труб или другой трубопровод. В процессе калибровки, материал протекает через трубопровод с известным расходом и константой пропорциональности между разностью фаз или временной задержкой, и расход вычисляется и записывается в качестве FCF.
Одно преимущество кориолисова расходомера состоит в том, что точность измеренного массового расхода не затрагивается посредством износа подвижных компонентов в расходомере. Более конкретно, единственные подвижные части представляют собой вибрационные трубопроводы и все датчики или измерительные преобразователи, прикрепленные к вибрационному трубопроводу. Тем не менее, возникает такая проблема, что трубопроводы могут изменяться со временем. Более конкретно, изменение трубопроводов может вызывать изменение механических свойств трубопровода. Например, изменение трубопровода может вызывать изменение жесткости трубопровода относительно начального характерного значения жесткости (либо исходного измеренного значения жесткости) в течение срока службы вибрационного расходомера. Изменение может вызываться посредством эрозии, коррозии, покрытия, повреждения и т.д. Как результат, начальное заводское калибровочное значение, которое может называться "опорным коэффициентом" или "FCF-значением", может вызывать смещение измерения со временем по мере того, как трубопроводы подвергаются коррозии, эрозии или иным образом изменяются.
Изменение в силу этого может обнаруживаться посредством вычисления значения жесткости трубопровода и его сравнения с базовым значением жесткости. Это сравнение может называться "верификацией измерителя или узла датчиков". Базовое значение жесткости может определяться в идентичное или приблизительно в идентичное время с тем, как вычисляется FCF. Когда текущее значение жесткости отличается от базового значения жесткости, изменение, возможно, возникает в трубопроводе. Другие параметры трубопровода могут использоваться аналогичным образом, такие как остаточная гибкость, масса и демпфирование датчика и т.д. Тем не менее, вычисление значений этих и других параметров трубопровода может затруднять измерения в реальном времени и может приводить к прерываниям процесса потребителя, чтобы выполнять вычисления. Вычисление значений параметров трубопровода может исключаться за счет некоторого использования параметров сигналов датчиков для того, чтобы обнаруживать изменение одного или более трубопроводов узла датчиков. Соответственно, имеется потребность в использовании параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Сущность изобретения
Предоставляются электронные схемы измерителя для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Согласно варианту осуществления, электронные схемы измерителя содержат интерфейс, функционально соединенный с узлом датчиков, причем интерфейс выполнен с возможностью принимать два сигнала датчиков, и систему обработки, функционально соединенную с интерфейсом. Система обработки выполнена с возможностью вычислять значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков и сравнивать вычисленное значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков с базовым значением взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков.
Предоставляется способ использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Согласно варианту осуществления, способ содержит вычисление значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков и сравнение вычисленного значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков с базовым значением взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков.
Предоставляются электронные схемы измерителя для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Согласно варианту осуществления, электронные схемы измерителя содержат интерфейс, выполненный с возможностью принимать сигнал левого измерительного тензодатчика и сигнал правого измерительного тензодатчика из узла измерителя, и систему обработки, функционально соединенную с интерфейсом. Система обработки выполнена с возможностью определять текущее первое значение верификации узла датчиков и текущее второе значение верификации узла датчиков, сравнивать текущее первое значение верификации узла датчиков с базовым первым значением верификации узла датчиков для того, чтобы определять первый сдвиг верификации узла датчиков, сравнивать текущее второе значение верификации узла датчиков с базовым вторым значением взаимосвязи параметров сигналов датчиков для того, чтобы определять второй сдвиг верификации узла датчиков, и определять условия трубопровода на основе первого сдвига верификации узла датчиков и второго сдвига верификации узла датчиков. По меньшей мере, одно из текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков состоит из значения взаимосвязи параметров сигналов датчиков.
Предоставляется способ для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Согласно варианту осуществления, способ содержит определение текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков, сравнение текущего первого значения верификации узла датчиков с базовым первым значением верификации узла датчиков для того, чтобы определять первый сдвиг верификации узла датчиков, сравнение текущего второго значения верификации узла датчиков с базовым вторым значением верификации узла датчиков для того, чтобы определять второй сдвиг верификации узла датчиков, и определение условий трубопровода на основе первого сдвига верификации узла датчиков и второго сдвига верификации узла датчиков. По меньшей мере, одно из текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков состоит из значения взаимосвязи параметров сигналов датчиков.
Предоставляются электронные схемы измерителя для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Согласно варианту осуществления, электронные схемы измерителя содержат систему обработки, включающую в себя систему хранения данных, выполненную с возможностью сохранять значение центральной тенденции значения верификации узла датчиков и значение дисперсии значения верификации узла датчиков. Система обработки выполнена с возможностью получать значение центральной тенденции и значение дисперсии из системы хранения данных и определять вероятность на основе значения центральной тенденции и значения дисперсии, чтобы обнаруживать то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков. Значение верификации узла датчиков основано на значениях параметров сигналов датчиков.
Предоставляется способ для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Согласно варианту осуществления, способ содержит получение значения центральной тенденции значения верификации узла датчиков и значения дисперсии значения верификации узла датчиков из устройства хранения данных в электронных схемах измерителя виброметра и определение вероятности на основе значения центральной тенденции и значения дисперсии, чтобы определять то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков. Базовое значение верификации узла датчиков основано на значениях параметров сигналов датчиков.
Аспекты
Согласно аспекту, электронные схемы измерителя для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, содержат интерфейс, функционально соединенный с узлом датчиков, причем интерфейс выполнен с возможностью принимать два сигнала датчиков, и систему обработки, функционально соединенную с интерфейсом. Система обработки выполнена с возможностью вычислять значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков и сравнивать вычисленное значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков с базовым значением взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков.
Предпочтительно, электронные схемы измерителя, выполненные с возможностью вычислять значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков, содержат электронные схемы измерителя, выполненные с возможностью вычислять значение взаимосвязи параметров сигналов датчиков между значением напряжения сигнала левого измерительного тензодатчика и значением напряжения сигнала правого измерительного тензодатчика.
Предпочтительно, электронные схемы измерителя, выполненные с возможностью вычислять значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков, содержат электронные схемы измерителя, выполненные с возможностью вычислять одно из отношения и разности между двумя значениями параметров сигналов датчиков для двух сигналов датчиков.
Предпочтительно, электронные схемы измерителя, выполненные с возможностью сравнивать вычисленное значение взаимосвязи параметров сигналов датчиков с базовым значением взаимосвязи параметров сигналов датчиков, содержат электронные схемы измерителя, выполненные с возможностью вычислять разность между вычисленным значением взаимосвязи параметров сигналов датчиков и базовым значением взаимосвязи параметров сигналов датчиков.
Предпочтительно, два сигнала датчиков содержат два из возбуждающего сигнала, сигнала левого измерительного тензодатчика и сигнала правого измерительного тензодатчика.
Предпочтительно, электронные схемы измерителя дополнительно выполнены с возможностью определять условия узла датчиков на основе сравнения вычисленного значения взаимосвязи параметров сигналов датчиков и базового значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков.
Согласно аспекту, способ использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, содержит вычисление значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков и сравнение вычисленного значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков с базовым значением взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков.
Предпочтительно, вычисление значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков содержит вычисление значения взаимосвязи параметров сигналов датчиков между значением напряжения сигнала левого измерительного тензодатчика и значением напряжения сигнала правого измерительного тензодатчика.
Предпочтительно, вычисление значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков содержит вычисление одного из отношения и разности между двумя значениями параметров сигналов датчиков для двух сигналов датчиков.
Предпочтительно, сравнение вычисленного значения взаимосвязи параметров сигналов датчиков с базовым значением взаимосвязи параметров сигналов датчиков содержит вычисление разности между вычисленным значением взаимосвязи параметров сигналов датчиков и базовым значением взаимосвязи параметров сигналов датчиков.
Предпочтительно, два сигнала датчиков содержат два из возбуждающего сигнала, сигнала левого измерительного тензодатчика и сигнала правого измерительного тензодатчика.
Предпочтительно, способ дополнительно содержит определение условий узла датчиков на основе сравнения вычисленного значения взаимосвязи параметров сигналов датчиков и базового значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков.
Согласно аспекту, электронные схемы измерителя для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, содержат интерфейс, выполненный с возможностью принимать сигнал левого измерительного тензодатчика и сигнал правого измерительного тензодатчика из узла измерителя, и систему обработки, функционально соединенную с интерфейсом. Система обработки выполнена с возможностью определять текущее первое значение верификации узла датчиков и текущее второе значение верификации узла датчиков, сравнивать текущее первое значение верификации узла датчиков с базовым первым значением верификации узла датчиков для того, чтобы определять первый сдвиг верификации узла датчиков, сравнивать текущее второе значение верификации узла датчиков с базовым вторым значением взаимосвязи параметров сигналов датчиков для того, чтобы определять второй сдвиг верификации узла датчиков, и определять условия трубопровода на основе первого сдвига верификации узла датчиков и второго сдвига верификации узла датчиков. По меньшей мере, одно из текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков состоит из значения взаимосвязи параметров сигналов датчиков.
Предпочтительно, первый сдвиг верификации узла датчиков представляет изменение физической жесткости трубопровода между формирователем сигналов управления и левым измерительным датчиком, и второй сдвиг верификации узла датчиков представляет изменение физической жесткости трубопровода между формирователем сигналов управления и правым измерительным датчиком.
Предпочтительно, значение взаимосвязи параметров сигналов датчиков представляет собой одно из отношения и разности двух значений параметров сигналов датчиков.
Предпочтительно, значение взаимосвязи параметров сигналов датчиков определяется на основе двух из параметра сигнала левого измерительного тензодатчика, параметра сигнала правого измерительного тензодатчика и параметра возбуждающего сигнала.
Предпочтительно, система обработки дополнительно выполнена с возможностью предоставлять аварийное оповещение на основе определенных условий трубопровода.
Предпочтительно, условия трубопровода содержат, по меньшей мере, одно из эрозии, коррозии, повреждения и покрытия трубопровода узла датчиков.
Предпочтительно, система обработки дополнительно выполнена с возможностью определять условия трубопровода на основе, по меньшей мере, одного из жесткости, остаточной гибкости, демпфирования и массы трубопровода.
Согласно аспекту, способ для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, содержит определение текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков, сравнение текущего первого значения верификации узла датчиков с базовым первым значением верификации узла датчиков для того, чтобы определять первый сдвиг верификации узла датчиков, сравнение текущего второго значения верификации узла датчиков с базовым вторым значением верификации узла датчиков для того, чтобы определять второй сдвиг верификации узла датчиков, и определение условий трубопровода на основе первого сдвига верификации узла датчиков и второго сдвига верификации узла датчиков. По меньшей мере, одно из текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков состоит из значения взаимосвязи параметров сигналов датчиков.
Предпочтительно, первый сдвиг верификации узла датчиков представляет изменение физической жесткости трубопровода между формирователем сигналов управления и левым измерительным тензодатчиком, и второй сдвиг верификации узла датчиков представляет изменение физической жесткости трубопровода между формирователем сигналов управления и правым измерительным тензодатчиком.
Предпочтительно, значение взаимосвязи параметров сигналов датчиков представляет собой одно из отношения и разности двух значений параметров сигналов датчиков.
Предпочтительно, значение взаимосвязи параметров сигналов датчиков определяется на основе двух из параметра сигнала левого измерительного тензодатчика, параметра сигнала правого измерительного тензодатчика и параметра возбуждающего сигнала.
Предпочтительно, способ дополнительно содержит предоставление аварийного оповещения на основе определения условий трубопровода.
Предпочтительно, условия трубопровода содержат, по меньшей мере, одно из эрозии, коррозии, повреждения и покрытия трубопровода виброметра.
Согласно аспекту, электронные схемы измерителя для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, содержат систему обработки, включающую в себя систему хранения данных, выполненную с возможностью сохранять значение центральной тенденции значения верификации узла датчиков и значение дисперсии значения верификации узла датчиков. Система обработки выполнена с возможностью получать значение центральной тенденции и значение дисперсии из системы хранения данных и определять вероятность на основе значения центральной тенденции и значения дисперсии, чтобы обнаруживать то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков. Базовое значение верификации узла датчиков основано на значениях параметров сигналов датчиков.
Предпочтительно, значение верификации узла датчиков представляет собой одно из значения отношения LPO/RPO-напряжений, значения отношения DRV/LPO-напряжений и значения отношения DRV/RPO-напряжений.
Предпочтительно, система обработки, выполненная с возможностью определять вероятность на основе значения центральной тенденции и значения дисперсии, содержит систему обработки, выполненную с возможностью вычислять t-значение и вычислять вероятность с использованием t-значения.
Предпочтительно, система обработки, выполненная с возможностью определять вероятность на основе значения центральной тенденции и значения дисперсии, содержит систему обработки, выполненную с возможностью вычислять степень свободы на основе числа измерений для верификации узла датчиков.
Предпочтительно, система обработки, выполненная с возможностью определять вероятность на основе значения центральной тенденции и значения дисперсии, содержит систему обработки, выполненную с возможностью вычислять среднеквадратическую ошибку на основе среднеквадратического отклонения и степени свободы.
Предпочтительно, среднеквадратическая ошибка вычисляется с использованием следующего уравнения:
 ;
;
где:
stddevpooled является среднеквадратическим отклонением; и
nDOF является степенью свободы.
Предпочтительно, значение дисперсии является объединенным в пул среднеквадратическим отклонением, содержащим среднеквадратическое отклонение измерений для верификации узла датчиков и базовых измерений для верификации узла датчиков.
Предпочтительно, вероятность содержит доверительный интервал значения центральной тенденции.
Предпочтительно, доверительный интервал сравнивается с нулем, при этом если доверительный интервал не включает в себя нуль, то выполняется обнаружение того, что значение центральной тенденции не равно базовому значению верификации узла датчиков, и если доверительный интервал включает в себя нуль, то выполняется обнаружение того, что значение центральной тенденции равно базовому значению верификации узла датчиков.
Предпочтительно, значение центральной тенденции является значением верификации узла датчиков, и доверительный интервал значения верификации узла датчиков вычисляется с использованием следующего уравнения:
 ;
;
где:
CI является доверительным интервалом значения верификации узла датчиков;
SVmean является значением верификации узла датчиков, полученным из системы хранения данных; и
CIrange является диапазоном доверительного интервала, вычисленным на основе среднеквадратического отклонения и t-значения.
Предпочтительно, диапазон доверительного интервала вычисляется с использованием следующего уравнения:
 ;
;
где:
stderrorpooled является объединенной в пул среднеквадратической ошибкой измерений для верификации узла датчиков; и
tstudent,99,8 является t-значением, вычисленным на основе уровня значимости и степеней свободы, определенных из числа измерений для верификации узла датчиков, содержащих значение верификации узла датчиков.
Предпочтительно, система обработки дополнительно выполнена с возможностью задавать мертвую зону смещения, при этом если значение центральной тенденции меньше мертвой зоны смещения, то значение верификации узла датчиков не обнаруживается как отличающееся от базового значения верификации узла датчиков.
Предпочтительно, система обработки, выполненная с возможностью определять вероятность на основе значения центральной тенденции и значения дисперсии, содержит систему обработки, выполненную с возможностью определять доверительный интервал на основе значения центральной тенденции и значения дисперсии.
Предпочтительно, базовое значение верификации узла датчиков содержит значение центральной тенденции и значение дисперсии базового значения верификации узла датчиков.
Предпочтительно, значение центральной тенденции базового значения верификации узла датчиков является средним значением относительно базового значения верификации узла датчиков, и значение дисперсии базового значения верификации узла датчиков является среднеквадратическим отклонением базового значения верификации узла датчиков.
Предпочтительно, электронные схемы измерителя, выполненные с возможностью обнаруживать то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков, содержат электронные схемы измерителя, выполненные с возможностью определять то, не перекрывается либо перекрывается вероятность на основе значения центральной тенденции и значения дисперсии с вероятностью базового значения верификации узла датчиков.
Предпочтительно, вероятность на основе значения центральной тенденции и значения дисперсии содержит доверительный интервал, определенный на основе значения центральной тенденции и значения дисперсии, и вероятность базового значения верификации узла датчиков содержит доверительный интервал, определенный на основе базовых измерений для верификации узла датчиков.
Предпочтительно, электронные схемы измерителя, выполненные с возможностью определять то, не перекрывается либо перекрывается вероятность на основе на значения центральной тенденции с вероятностью базового значения верификации узла датчиков, содержат электронные схемы измерителя, выполненные с возможностью:
- вычислять следующие уравнения:
 ;
;
 ; и
; и
- определять то, что вероятность значения центральной тенденции и значения дисперсии, полученных из системы хранения данных, перекрывается с вероятностью базового значения верификации узла датчиков, если:
 .
.
Предпочтительно, базовое среднеквадратическое отклонение вычисляется согласно следующему уравнению:
 .
.
Согласно аспекту, способ для использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, содержит получение значения центральной тенденции значения верификации узла датчиков и значения дисперсии значения верификации узла датчиков из устройства хранения данных в электронных схемах измерителя виброметра и определение вероятности на основе значения центральной тенденции и значения дисперсии, чтобы определять то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков. Базовое значение верификации узла датчиков основано на значениях параметров сигналов датчиков.
Предпочтительно, значение верификации узла датчиков представляет собой одно из значения отношения LPO/RPO-напряжений, значения отношения DRV/LPO-напряжений и значения отношения DRV/RPO-напряжений.
Предпочтительно, определение вероятности на основе значения центральной тенденции и значения дисперсии содержит вычисление t-значения и вычисление вероятности с использованием t-значения.
Предпочтительно, определение вероятности на основе значения центральной тенденции и значения дисперсии содержит вычисление степени свободы на основе числа измерений для верификации узла датчиков.
Предпочтительно, определение вероятности на основе значения центральной тенденции и значения дисперсии содержит вычисление среднеквадратической ошибки на основе среднеквадратического отклонения и степеней свободы.
Предпочтительно, среднеквадратическая ошибка вычисляется с использованием следующего уравнения:
;
где:
stddevpooled является среднеквадратическим отклонением; и
nDOF является степенями свободы.
Предпочтительно, значение дисперсии является объединенным в пул среднеквадратическим отклонением, содержащим среднеквадратическое отклонение измерений для верификации узла датчиков и базовых измерений для верификации узла датчиков.
Предпочтительно, вероятность содержит доверительный интервал значения центральной тенденции.
Предпочтительно, доверительный интервал сравнивается с нулем, при этом если доверительный интервал не включает в себя нуль, то выполняется обнаружение того, что значение центральной тенденции не равно базовому значению верификации узла датчиков, и если доверительный интервал включает в себя нуль, то выполняется обнаружение того, что значение центральной тенденции равно базовому значению верификации узла датчиков.
Предпочтительно, значение центральной тенденции является значением верификации узла датчиков, и доверительный интервал значения верификации узла датчиков вычисляется с использованием следующего уравнения:
;
где:
CI является доверительным интервалом значения верификации узла датчиков;
SVmean является значением верификации узла датчиков, полученным из системы (204) хранения данных; и
CIrange является диапазоном доверительного интервала, вычисленным на основе среднеквадратического отклонения и t-значения.
Предпочтительно, диапазон доверительного интервала вычисляется с использованием следующего уравнения:
;
где:
stderrorpooled является объединенной в пул среднеквадратической ошибкой измерений для верификации узла датчиков; и
tstudent,99,8 является t-значением, вычисленным на основе уровня значимости и степеней свободы, определенных из числа измерений для верификации узла датчиков, содержащих значение верификации узла датчиков.
Предпочтительно, способ дополнительно содержит задание мертвой зоны смещения, при этом если значение центральной тенденции меньше мертвой зоны смещения, то значение верификации узла датчиков не обнаруживается как отличающееся от базового значения верификации узла датчиков.
Предпочтительно, определение вероятности на основе значения центральной тенденции и значения дисперсии содержит определение доверительного интервала на основе значения центральной тенденции и значения дисперсии.
Предпочтительно, базовое значение верификации узла датчиков содержит значение центральной тенденции и значение дисперсии базового значения верификации узла датчиков.
Предпочтительно, значение центральной тенденции базового значения верификации узла датчиков является средним значением относительно базового значения верификации узла датчиков, и значение дисперсии базового значения верификации узла датчиков является среднеквадратическим отклонением базового значения верификации узла датчиков.
Предпочтительно, обнаружение того, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков, содержит определение того, не перекрывается либо перекрывается вероятность на основе значения центральной тенденции и значения дисперсии с вероятностью базового значения верификации узла датчиков.
Предпочтительно, вероятность на основе значения центральной тенденции и значения дисперсии содержит доверительный интервал, определенный на основе значения центральной тенденции и значения дисперсии, и вероятность базового значения верификации узла датчиков содержит доверительный интервал, определенный на основе базовых измерений для верификации узла датчиков.
Предпочтительно, определение того, не перекрывается либо перекрывается вероятность на основе значения центральной тенденции и значения дисперсии с вероятностью базового значения верификации узла датчиков, содержит вычисление следующих уравнений:
;
; и
- определение того, что вероятность значения центральной тенденции и значения дисперсии, полученных из устройства хранения данных, перекрывается с вероятностью базового значения верификации узла датчиков, если:
.
Предпочтительно, среднеквадратическое отклонение базового значения верификации системного узла вычисляется согласно следующему уравнению:
.
Краткое описание чертежей
Идентичные номера ссылок представляют один элемент на всех чертежах. Следует понимать, что чертежи необязательно должны быть нарисованы в масштабе.
Фиг. 1 показывает виброметр 5, выполненный с возможностью использовать параметры сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Фиг. 2 показывает блок-схему виброметра 5, включающую в себя представление в форме блок-схемы электронных схем 20 измерителя, выполненных с возможностью использовать параметры сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Фиг. 3 показывает электронные схемы 20 измерителя, выполненные с возможностью использовать параметры сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Фиг. 4 показывает график 400, иллюстрирующий соответствие между жесткостью узла датчиков и разностью между параметрами сигналов датчиков.
Фиг. 5 показывает способ 500 использования параметров сигналов датчиков узла датчиков, такого как узел 10 датчиков, описанный выше, для того, чтобы верифицировать узел датчиков.
Фиг. 6 показывает способ 600 использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Фиг. 7 показывает способ 700 использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
Подробное описание изобретения
Фиг. 1-7 и нижеприведенное описание иллюстрируют конкретные примеры, которые обучают специалистов в данной области техники тому, как чтобы осуществлять и использовать оптимальный режим вариантов осуществления использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Для целей изучения принципов изобретения, некоторые традиционные аспекты упрощены или опущены. Специалисты в данной области техники должны принимать во внимание варьирования этих примеров, которые попадают в пределы объема настоящего описания. Специалисты в данной области техники должны принимать во внимание, что признаки, описанные ниже, могут комбинироваться различными способами для того, чтобы формировать несколько варьирований использования сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы обнаруживать изменение узла датчиков. Как результат, варианты осуществления, описанные ниже, ограничены не конкретными примерами, описанными ниже, а только посредством формулы изобретения и ее эквивалентов.
Фиг. 1 показывает виброметр 5, выполненный с возможностью использовать параметры сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Как показано на фиг. 1, виброметр 5 содержит узел 10 датчиков и электронные схемы 20 измерителя. Узел 10 датчиков реагирует на массовый расход и плотность технологического материала. Электронные схемы 20 измерителя соединяются с узлом 10 датчиков через выводные провода, транспортирующие сигналы 10 датчиков. Можно принимать во внимание, что сигналы 100 датчиков включают в себя RTD-сигнал, возбуждающий сигнал и сигналы левого и правого датчика. Электронные схемы 20 измерителя могут быть выполнены с возможностью использовать сигналы 100 датчиков для того, чтобы вычислять и предоставлять информацию плотности, массового расхода, температуры и т.п. по порту 26.
Узел 10 датчиков включает в себя пару коллекторов 150 и 150', фланцы 103 и 103', имеющие воротники 110 и 110' фланца, пару параллельных трубопроводов 130 и 130', формирователь 180 сигналов управления, резистивный детектор 190 температуры (RTD) и пару измерительных тензодатчиков 170l и 170r. Трубопроводы 130 и 130' имеют две практически прямые впускные ветви 131, 131' и выпускные ветви 134, 134', которые сходятся друг к другу в монтажных блоках 120 и 120' трубопровода. Трубопроводы 130, 130' изгибаются в двух симметричных местоположениях вдоль длины и являются практически параллельными по всей длине. Распорные стержни 140 и 140' служат для того, чтобы задавать ось W и W', вокруг которой колеблется каждый трубопровод 130, 130'. Ветви 131, 131' и 134, 134' трубопроводов 130, 130' жестко присоединяются к монтажным блокам 120 и 120' трубопровода, и эти блоки, в свою очередь, жестко присоединяются к коллекторам 150 и 150'. Это предоставляет непрерывный замкнутый тракт для материалов через узел 10 датчиков.
Когда фланцы 103 и 103', имеющие отверстия 102 и 102', соединяются через впускной конец 104 и выпускной конец 104' с технологической линией (не показана), которая переносит технологический материал, который измеряется, материал входит во впускной конец 104 измерителя через диафрагменное отверстие 101 во фланце 103 и проводится через коллектор 150 в монтажный блок 120 трубопровода, имеющий поверхность 121. В коллекторе 150, материал разделяется и маршрутизируется через трубопроводы 130, 130'. После выхода из трубопроводов 130, 130', технологический материал рекомбинируется в одном потоке в блоке 120', имеющем поверхность 121' и коллектор 150', и после этого направляется в выпускной конец 104', соединенный посредством фланца 103', имеющего отверстия 102', с технологической линией (не показана).
Трубопроводы 130, 130' выбираются и надлежащим образом монтируются на монтажных блоках 120, 120' трубопровода таким образом, что они имеют практически идентичное массовое распределение, моменты инерции и модуль Юнга вокруг осей W--W и W'--W' изгиба, соответственно. Эти оси изгиба проходят через распорные стержни 140, 140'. Поскольку модуль Юнга трубопроводов изменяется с температурой, и это изменение затрагивает вычисление потока и плотности, RTD 190 монтируется на трубопроводе 130', чтобы непрерывно измерять температуру трубопровода 130'. Температура трубопровода 130' и в силу этого напряжение, возникающее на RTD 190 для данного тока, пропускаемого через него, регулируется посредством температуры материала, проходящего через трубопровод 130'. Температурно-зависимое напряжение, возникающее на RTD 190, используется известным способом посредством электронных схем 20 измерителя для того, чтобы компенсировать изменение модуля упругости трубопроводов 130, 130' вследствие изменений температуры трубопровода. RTD 190 соединяется с электронными схемами 20 измерителя посредством выводного провода 195.
Оба трубопровода 130, 130' возбуждаются посредством формирователя 180 сигналов управления в противоположных направлениях вокруг соответствующих осей W и W' изгиба и в том, что называется "первой несинфазной изгибной модой виброметра". Этот формирователь 180 сигналов управления может содержать любую из множества известных компоновок, такую как магнит, смонтированный на трубопроводе 130', и противодействующую катушку, смонтированную на трубопроводе 130, и через которую переменный ток проходит для вибрации в обоих трубопроводах 130, 130'. Подходящий возбуждающий сигнал 185 применяется посредством электронных схем 20 измерителя, через выводной провод, к формирователю 180 сигналов управления.
Электронные схемы 20 измерителя принимают RTD-сигнал температуры на выводном проводе 195 и сигналы 165 датчиков, возникающие на выводных проводах 100, переносящих сигналы 165l, 165r левого и правого датчика, соответственно. Электронные схемы 20 измерителя формируют возбуждающий сигнал, возникающий на выводном проводе 185, в формирователь 180 сигналов управления и вызывают вибрацию в трубопроводах 130, 130'. Электронные схемы 20 измерителя обрабатывают сигналы 165l, 165r левого и правого датчика и RTD-сигнал из выводного провода 195, чтобы вычислять массовый расход и плотность материала, проходящего через узел 10 датчиков. Эта информация, наряду с другой информацией, применяется посредством электронных схем 20 измерителя по тракту 26 в качестве сигнала. Ниже приводится более подробное пояснение электронных схем 20 измерителя.
Фиг. 2 показывает блок-схему виброметра 5, включающую в себя представление в форме блок-схемы электронных схем 20 измерителя, выполненных с возможностью использовать параметры сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Как показано на фиг. 2, электронные схемы 20 измерителя функционально соединяются с узлом 10 датчиков. Как описано выше со ссылкой на фиг. 2, узел 10 датчиков включает в себя левый и правый измерительные тензодатчики 170l, 170r, формирователь 180 сигналов управления и температурный датчик 190, которые функционально соединяются с электронными схемами 20 измерителя через набор выводных проводов 100 через канал 112 связи.
Электронные схемы 20 измерителя предоставляют возбуждающий сигнал 185 через выводные провода 100. Более конкретно, электронные схемы 20 измерителя предоставляют возбуждающий сигнал 185 в формирователь 180 сигналов управления в узле 10 датчиков. Помимо этого, сигналы 165 датчиков, содержащие сигнал 165l левого датчика и сигнал 165r правого датчика, предоставляются посредством узла 10 датчиков. Более конкретно, в показанном варианте осуществления, сигналы 165 датчиков предоставляются посредством левого и правого измерительного тензодатчика 170l, 170r в узле 10 датчиков. Можно принимать во внимание, что сигналы 165 датчиков, соответственно, предоставляются в электронные схемы 20 измерителя через канал 112 связи.
Электронные схемы 20 измерителя включают в себя процессор 210, функционально соединенный с одним или более процессоров 220 сигналов и одним или более запоминающих устройств 230. Процессор 210 также функционально соединяется с пользовательским интерфейсом 30. Процессор 210 функционально соединяется с хостом через порт связи по порту 26 и принимает электрическую мощность через порт 250 подачи электрической мощности. Процессор 210 может представлять собой микропроцессор, хотя может использоваться любой подходящий процессор. Например, процессор 210 может состоять из подпроцессоров, таких как многоядерный процессор, последовательных портов связи, периферийных интерфейсов (например, последовательного периферийного интерфейса), внутримикросхемного запоминающего устройства, портов ввода-вывода и т.п. В этих и других вариантах осуществления, процессор 210 выполнен с возможностью выполнять операции для принимаемых и обработанных сигналов, таких как оцифрованные сигналы.
Процессор 210 может принимать оцифрованные сигналы датчиков из одного или более процессоров 220 сигналов. Процессор 210 также выполнен с возможностью предоставлять информацию, такую как разность фаз, свойство текучей среды в узле 10 датчиков и т.п. Процессор 210 может предоставлять информацию в хост через порт связи. Процессор 210 также может быть выполнен с возможностью обмениваться данными с одним или более запоминающих устройств 230, чтобы принимать и/или сохранять информацию в одном или более запоминающих устройств 230. Например, процессор 210 может принимать коэффициенты калибровки и/или нули узла датчиков (например, разность фаз, когда имеется нулевой расход) из одного или более запоминающих устройств 230. Каждый из коэффициентов калибровки и/или нулей узла датчиков, соответственно, может быть ассоциирован с виброметром 5 и/или узлом 10 датчиков. Процессор 210 может использовать коэффициенты калибровки, чтобы обрабатывать оцифрованные сигналы датчиков, принимаемые из одного или более процессоров 220 сигналов.
Один или более процессоров 220 сигналов показаны как состоящие из кодера/декодера 222 (кодека) и аналого-цифрового преобразователя 226 (ADC). Один или более процессоров 220 сигналов могут преобразовывать и согласовывать аналоговые сигналы, оцифровать преобразованные и согласованные аналоговые сигналы и/или предоставлять оцифрованные сигналы. Кодек 222 выполнен с возможностью принимать сигналы 165 датчиков из левого и правого измерительных тензодатчиков 170l, 170r. Кодек 222 также выполнен с возможностью предоставлять возбуждающий сигнал 185 в формирователь 180 сигналов управления. В альтернативных вариантах осуществления, может использоваться большее или меньшее количество процессоров сигналов.
Как показано, сигналы 165 датчиков предоставляются в кодек 222 через модуль 240 преобразования и согласования сигналов. Возбуждающий сигнал 185 предоставляется в формирователь 180 сигналов управления через модуль 240 преобразования и согласования сигналов. Хотя модуль 240 преобразования и согласования сигналов показан как один блок, модуль 240 преобразования и согласования сигналов может состоять из компонентов преобразования и согласования сигналов, таких как два или более операционных усилителя, фильтров, таких как фильтры нижних частот, усилителей напряжения в ток и т.п. Например, сигналы 165 датчиков могут усиливаться посредством первого усилителя, и возбуждающий сигнал 185 может усиливаться посредством усилителя напряжения в ток. Усиление может обеспечивать то, что абсолютная величина сигналов 165 датчиков аппроксимирует полномасштабный диапазон кодека 222.
В показанном варианте осуществления, одно или более запоминающих устройств 230 состоят из постоянного запоминающего устройства 232 (ROM), оперативного запоминающего устройства 234 (RAM) и ферроэлектрического оперативного запоминающего устройства 236 (FRAM). Тем не менее, в альтернативных вариантах осуществления, одно или более запоминающих устройств 230 могут состоять из большего или меньшего количества запоминающих устройств. Дополнительно или альтернативно, одно или более запоминающих устройств 230 могут состоять из различных типов запоминающего устройства (например, энергозависимых, энергонезависимых и т.д.). Например, другой тип энергонезависимого запоминающего устройства, такой как, например, стираемое программируемое постоянное запоминающее устройство (EPROM) и т.п., может использоваться вместо FRAM 236. Одно или более запоминающих устройств 230 могут представлять собой устройство хранения данных, выполненное с возможностью сохранять данные процессов, такие как возбуждающие сигналы или сигналы датчиков, измерения массового расхода или плотности и т.д.
Измерение массового расхода может формироваться согласно уравнению:
 ; [1]
; [1]
где:
m является измеренным массовым расходом;
FCF является коэффициентом калибровки расхода;
Δt является измеренной временной задержкой; и
Δt0 является временной задержкой при нулевом расходе.
Измеренная временная задержка Δt содержит извлекаемое в рабочем режиме (т.е. измеренное) значение временной задержки, содержащее временную задержку, существующую между сигналами измерительных тензодатчиков, к примеру, если временная задержка обусловлена кориолисовыми эффектами, связанными с массовым расходом через виброметр 5. Измеренная временная задержка Δt представляет собой прямое измерение массового расхода текучего материала по мере того, как он протекает через виброметр 5. Временная задержка Δt0 при нулевом расходе содержит временную задержку при нулевом расходе. Временная задержка Δt0 при нулевом расходе является значением при нулевом расходе, которое может определяться на заводе и программироваться в виброметре 5. Временная задержка Δt0 при нулевом расходе является примерным значением при нулевом расходе. Могут использоваться другие значения при нулевом расходе, такие как разность фаз, разность времен и т.п., которые определяются при условиях нулевого расхода. Значение временной задержки Δt0 при нулевом расходе может не изменяться, даже в случае, если условия расхода изменяются. Значение массового расхода материала, протекающего через виброметр 5, определяется посредством умножения разности между измеренной временной задержкой Δt и опорным значением Δt0 при нулевом расходе на коэффициент FCF калибровки расхода. Коэффициент FCF калибровки расхода является пропорциональным физической жесткости виброметра.
Касательно плотности, резонансная частота, на которой может вибрировать каждый трубопровод 130, 130', может представлять собой функцию квадратного корня константы пружины трубопровода 130, 130', деленного на полную массу трубопровода 130, 130', имеющего материал. Полная масса трубопровода 130, 130', имеющего материал, может быть массой трубопровода 130, 130' плюс масса материала в трубопроводе 130, 130'. Масса материала в трубопроводе 130, 130' является прямо пропорциональной плотности материала. Следовательно, плотность этого материала может быть пропорциональной квадрату периода, в котором трубопровод 130, 130', содержащий материал, колеблется, умноженному на константу пружины трубопровода 130, 130'. Следовательно, посредством определения периода, в котором трубопровод 130, 130' колеблется, и посредством надлежащего масштабирования результата, может получаться точный показатель плотности материала, содержащегося посредством трубопровода 130, 130'. Электронные схемы 20 измерителя могут определять период или резонансную частоту с использованием сигналов 165 датчиков и/или возбуждающего сигнала 185. Трубопроводы 130, 130' могут колебаться более чем с одной модой вибраций. Как подробнее поясняется ниже по тексту, электронные схемы 20 измерителя также могут выполнять верификацию узла датчиков.
Фиг. 3 показывает электронные схемы 20 измерителя, выполненные с возможностью использовать параметры сигналов 100 датчиков, предоставленных посредством узла 10 датчиков, для того, чтобы верифицировать узел 10 датчиков. Как показано на фиг. 3, электронные схемы 20 измерителя включают в себя интерфейс 301 и систему 302 обработки. Электронные схемы 20 измерителя, например, принимают вибрационный отклик из узла датчиков, такого как узел 10 датчиков, описанный выше. Электронные схемы 20 измерителя могут обрабатывать вибрационный отклик, чтобы получать свойства текучести текучего материала, протекающего через узел 10 датчиков. Электронные схемы 20 измерителя также могут выполнять проверки, верификации, процедуры калибровки и т.п., чтобы обеспечивать то, что свойства текучести текучего материала точно измеряются.
Интерфейс 301 может принимать сигналы 165 датчиков из одного из измерительных тензодатчиков 170l, 170r, показанных на фиг. 1 и 2. Интерфейс 301 также может быть выполнен с возможностью принимать возбуждающий сигнал 185, например, из модуля 240 преобразования и согласования сигналов. Хотя возбуждающий сигнал 185 показан как предоставляемый посредством модуля 240 преобразования и согласования сигналов, обратная EMF может предоставляться из узла 10 датчиков в электронные схемы 20 измерителя вследствие вибрации трубопроводов 130 в узле 10 датчиков. Соответственно, интерфейс 301 может быть выполнен с возможностью принимать сигналы 100 датчиков, показанные на фиг. 2.
Интерфейс 301 может выполнять любое необходимое или желательное преобразование и согласование сигналов, к примеру, любой способ форматирования, усиления, буферизации и т.д. Альтернативно, часть или все преобразование и согласование сигналов может выполняться в системе 302 обработки. Помимо этого, интерфейс 301 может обеспечивать связь между электронными схемами 20 измерителя и внешними устройствами. Интерфейс 301 может допускать любой способ электронной, оптической или беспроводной связи. Интерфейс 301 может предоставлять информацию на основе вибрационного отклика. Интерфейс 301 может соединяться с цифрователем, таким как кодек 222, показанный на фиг. 2, при этом сигнал датчика содержит аналоговый сигнал датчика. Цифрователь дискретизирует и оцифровывает аналоговый сигнал датчика и формирует оцифрованный сигнал датчика.
Система 302 обработки проводит операции электронных схем 20 измерителя и обрабатывает измерения расхода из узла 10 датчиков. Система 302 обработки выполняет одну или более процедур обработки и за счет этого обрабатывает измерения расхода, чтобы формировать одно или более свойств текучести. Система 302 обработки функционально соединяется с интерфейсом 301 и выполнена с возможностью принимать информацию из интерфейса 301.
Система 302 обработки может содержать компьютер общего назначения, микропроцессорную систему, логическую схему либо некоторое другое обрабатывающее устройство общего назначения или индивидуально настроенное обрабатывающее устройство. Дополнительно или альтернативно, система 302 обработки может распределяться между несколькими обрабатывающими устройствами. Система 302 обработки также может включать в себя любой способ интегрированного или независимого электронного носителя хранения данных, такого как система 304 хранения данных.
Система 304 хранения данных может сохранять параметры и данные виброметра, программные процедуры, постоянные значения и переменные значения. В одном варианте осуществления, система 304 хранения данных включает в себя процедуры, которые выполняются посредством системы 302 обработки, такие как рабочая процедура 310. Система 302 обработки дополнительно может быть выполнена с возможностью выполнять другие процедуры, такие как процедура калибровки нуля и процедура верификации нуля виброметра 5. Система хранения данных также может сохранять статистические значения, такие как среднее значение, среднеквадратическое отклонение, доверительный интервал и т.д. и т.п.
Рабочая процедура 310 может определять значение 312 массового расхода и значение 314 плотности на основе сигналов датчиков, принимаемых посредством интерфейса 301. Значение 312 массового расхода может быть частотно-независимым значением массового расхода, непосредственно измеренным значением массового расхода и т.п. Значение 312 массового расхода может определяться из сигналов датчиков, таких как временная задержка между сигналом левого измерительного тензодатчика и сигналом правого измерительного тензодатчика. Значение 314 плотности также может определяться из сигналов датчиков, например, посредством определения частоты из одного или обоих из сигналов левого и правого измерительных тензодатчиков.
Как пояснено выше, узел датчиков, такой как узел 10 датчиков, описанный со ссылкой на фиг. 1 и 2, может верифицироваться посредством вычисления значения параметра трубопровода, такого как жесткость, масса, демпфирование, остаточная гибкость и т.д., узла датчиков, и сравнения вычисленного значения параметра трубопровода с базовым значением параметра трубопровода. Тем не менее, такие вычисления могут затруднять измерения в реальном времени и могут приводить к прерыванию процесса потребителя. Помимо этого, некоторые вычисления, такие как, например, способ на основе затухания усиления, который может использоваться для того, чтобы вычислять значение(я) параметра трубопровода, могут быть чувствительными к изменениям системного шума и условий технологического процесса. Это может ограничивать процедуру верификации узла датчиков условиями низкого или отсутствующего расхода или другими условиями, достаточно стабильными для вычислений значений параметров трубопровода. Как подробнее описано ниже по тексту, эти и другие проблемы могут исключаться за счет использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков.
По-прежнему ссылаясь на фиг. 3, система 304 хранения данных может включать в себя значения 320 параметров сигналов датчиков. Как показано на фиг. 3, значения 320 параметров сигналов датчиков могут включать в себя, например, значение 322 напряжения возбуждения, значение 324 LPO-напряжения и значение 326 RPO-напряжения. Значение 322 напряжения возбуждения, значение 324 LPO-напряжения и/или значение 326 RPO-напряжения могут определяться, например, в реальном времени во время процесса потребителя, во время калибровки с использованием известной текучей среды и т.п. Соответственно, значение 322 напряжения возбуждения, значение 324 LPO-напряжения и/или значение 326 RPO-напряжения могут быть идентичными или могут не быть идентичными значениям параметров датчиков, используемым для того, чтобы вычислять значение 312 массового расхода и/или значение 314 плотности. Можно принимать во внимание, что значение 322 напряжения возбуждения, значение 324 LPO-напряжения и/или значение 326 RPO-напряжения могут измеряться, определяться, получаться и/или вычисляться практически одновременно.
Значения 320 параметров сигналов датчиков могут использоваться для того, чтобы вычислять одно или более текущих значений 330 верификации узла датчиков на основе значений 320 параметров сигналов датчиков. Например, электронные схемы 20 измерителя или, более конкретно, система 302 обработки, могут быть выполнены с возможностью определять значение параметра сигналов датчика, такое как значение 322 напряжения возбуждения, значение 324 LPO-напряжения и/или значение 326 RPO-напряжения, сигнала датчика. Параметр сигналов датчика может быть амплитудой сигнала датчика, хотя может использоваться любой подходящий параметр сигналов датчика. Можно принимать во внимание, что амплитуда сигнала датчика может представлять собой напряжение, ток или мощность, хотя может использоваться любая подходящая амплитуда. Электронные схемы 20 измерителя или система 302 обработки также могут быть выполнены с возможностью вычислять значения взаимосвязи параметров сигналов датчиков из значений параметров сигналов датчиков. Электронные схемы 20 измерителя или, более конкретно, система 302 обработки, могут быть выполнены с возможностью сохранять значения взаимосвязи параметров сигналов датчиков в системе 304 хранения данных в качестве текущих значений 330 верификации узла датчиков.
Как показано на фиг. 3, текущие значения 330 верификации узла датчиков включают в себя значения взаимосвязи параметров сигналов датчиков, такие как текущее значение 332 отношения LPO/RPO-напряжений, текущее значение 334 отношения DRV/LPO-напряжений и текущее значение 336 отношения DRV/RPO-напряжений, хотя большее или меньшее количество текущих значений 330 верификации узла датчиков может измеряться, определяться, получаться, вычисляться и/или сохраняться посредством показанных электронных схем 20 измерителя или альтернативных электронных схем измерителя. Можно принимать во внимание, что текущее значение 332 отношения LPO/RPO-напряжений, текущее значение 334 отношения DRV/LPO-напряжений и текущее значение 336 отношения DRV/RPO-напряжений могут быть значениями взаимосвязи электрических параметров сигналов датчиков. Например, альтернативные электронные схемы измерителя могут быть выполнены с возможностью только измерять, определять то, получать, вычислять и/или сохранять значения взаимосвязи сигналов измерительных тензодатчиков, такие как текущее значение 332 отношения LPO/RPO-напряжений, поскольку текущее значение 332 отношения LPO/RPO-напряжений может использоваться для того, чтобы надежно обнаруживать значительное число, к примеру, большинство, изменений трубопровода при условиях технологического процесса, которые отличаются от условий калибровки, при которых базовые значения верификации узла датчиков вычисляются.
В качестве иллюстрации, базовое значение отношения LPO/RPO-напряжений может вычисляться во время калибровки FCF для данного виброметра. После того, как виброметр устанавливается на площадке потребителя, потребитель может выполнять процедуру верификации узла датчиков, в то время как виброметр измеряет массовый расход и/или плотность технологической текучей среды при условиях технологического процесса, которые отличаются от условий, при которых базовое значение отношения LPO/RPO-напряжений вычисляется, как подробнее поясняется ниже по тексту.
Способ на основе затухания усиления для вычисления значения жесткости трубопровода может использовать следующие уравнения:
 ; [2]
; [2]
 ; [3]
; [3]
где:
IDR является током возбуждения;
BLPO является коэффициентом чувствительности измерительного датчика, который представляет собой функцию температуры;
BLDR является коэффициентом чувствительности формирователя сигналов управления, который представляет собой функцию температуры;
ω0 является резонансной частотой трубопровода;
ζL является коэффициентом демпфирования, ассоциированным с левым участком трубопровода;
ζR является коэффициентом демпфирования, ассоциированным с правым участком трубопровода;
VLPO является напряжением левого измерительного тензодатчика;
VRPO является напряжением правого измерительного тензодатчика;
KL является жесткостью слева трубопровода, соответствующей сигналу левого измерительного тензодатчика ("левой жесткостью"); и
KR является жесткостью справа трубопровода, соответствующей сигналу правого измерительного тензодатчика ("правой жесткостью").
Как пояснено выше, измерения жесткости требуют вычислений, которые могут затруднять измерения в реальном времени и могут требовать от потребителя прерывать процесс. Чтобы определять то, как исключать такие проблемы, отношение вышеуказанной правой жесткости может учитываться следующим образом:
 . [4]
. [4]
Можно принимать во внимание, что несколько членов в уравнении [4] взаимно уничтожаются. Более конкретно, члены тока возбуждения и частоты трубки взаимно уничтожаются. Члены BLPO, BLDR чувствительности измерительного датчика и формирователя сигналов управления предположительно могут быть идентичными либо могут компенсироваться впоследствии. Как результат, следующая взаимосвязь может получаться:
 . [5]
. [5]
Уравнение [5] показывает то, что отношение  напряжения сигналов левого и правого измерительных датчиков является эквивалентным обратной величине
напряжения сигналов левого и правого измерительных датчиков является эквивалентным обратной величине  отношения жесткости, умноженной на член демпфирования. Соответственно, изменение демпфирования левой или правой трубки или жесткости левой и правой трубки может приводить к изменению, обнаруженному с учетом отношения напряжений измерительных датчиков. Как пояснено выше, параметр сигналов датчика может быть амплитудой сигнала датчика. Соответственно, уравнение [5] может обобщаться, например, как отношение амплитуд (например, напряжения, тока, мощности и т.д.) сигналов датчиков: ALPO/ARPO.
отношения жесткости, умноженной на член демпфирования. Соответственно, изменение демпфирования левой или правой трубки или жесткости левой и правой трубки может приводить к изменению, обнаруженному с учетом отношения напряжений измерительных датчиков. Как пояснено выше, параметр сигналов датчика может быть амплитудой сигнала датчика. Соответственно, уравнение [5] может обобщаться, например, как отношение амплитуд (например, напряжения, тока, мощности и т.д.) сигналов датчиков: ALPO/ARPO.
Можно принимать во внимание, что напряжения сигналов левого и правого измерительных тензодатчиков представляют собой параметры сигналов датчиков и в силу этого не требуют вычислений, аналогичных вычислениям, требуемым для того, чтобы вычислять значения параметров трубопровода, такие как жесткость трубопроводов. Помимо этого, вышеприведенное уравнение [5] показывает то, что отношение напряжений сигналов левого и правого измерительных тензодатчиков может использоваться для того, чтобы обнаруживать изменение жесткости. Изменение, которое может обнаруживаться, может быть ограничено несимметричными изменениями левой и правой жесткости трубопровода. Более конкретно, если изменение трубопровода вызывает пропорциональные изменения левой и правой жесткости, то отношение напряжений может не обнаруживать изменение.
Симметричные изменения в трубопроводе могут обнаруживаться посредством определения того, изменяются либо нет напряжение сигнала левого датчика или напряжение сигнала правого датчика относительно базового значения. Например, отношение напряжения сигнала левого измерительного тензодатчика и возбуждающего сигнала и отношение напряжения сигнала правого измерительного тензодатчика и напряжения возбуждающего сигнала могут сравниваться с их соответствующими базовыми значениями. Тем не менее, такое сравнение может требовать того, что условия узла датчиков должны быть идентичными тому, когда базовое значение определяется. Соответственно, чтобы обнаруживать симметричные изменения трубопроводов виброметра с параметрами сигналов датчиков, процесс потребителя, возможно, должен прерываться, но вычисления, требуемые для значений жесткости, могут исключаться.
По-прежнему ссылаясь на фиг. 3, система хранения данных может включать в себя базовые значения 340 верификации узла датчиков. Базовые значения 340 верификации узла датчиков могут включать в себя базовые значения взаимосвязи параметров сигналов датчиков. Например, как показано на фиг. 3, базовые значения 340 верификации узла датчиков могут включать в себя базовые значения взаимосвязи параметров сигналов датчиков, такие как базовое значение 342 отношения LPO/RPO-напряжений, базовое значение 344 отношения DRV/LPO-напряжений и базовое значение 346 отношения DRV/RPO-напряжений. Термин "DRV" может быть значением напряжения возбуждающего сигнала, предоставленного в формирователь сигналов управления, которое может быть идентичным значению 322 напряжения возбуждения, хотя может использоваться любой подходящий параметр сигналов датчика. Аналогично, термины "LPO" и "RPO", соответственно, могут быть значениями напряжения левого и правого измерительного датчика, которые могут быть идентичными значениям 324, 326 LPO- и RPO-напряжения, хотя может использоваться любой подходящий параметр сигналов датчика.
Базовые значения 340 верификации узла датчиков могут определяться во время заводской калибровки, калибровки потребителем или посредством любой другой подходящей процедуры, которая устанавливает опорное значение, с которым могут сравниваться последующие вычисленные значения. Базовые значения 340 верификации узла датчиков могут быть ассоциированы с коэффициентом калибровки расхода, используемым в измерениях расхода (например, с рабочим FCF), определенным одновременно с базовыми значениями 340 верификации узла датчиков. Соответственно, изменения одного или более трубопроводов с момента, когда рабочий FCF и базовые значения 340 верификации узла датчиков определены, могут приводить к некорректным измерениям.
Значение отношения LPO/RPO-напряжений, такое как текущее значение 332 отношения LPO/RPO-напряжений, поясненное выше со ссылкой на фиг. 3, может использоваться для того, чтобы обнаруживать изменение трубопровода узла датчиков. Иными словами, сдвиг значения верификации узла датчиков может использоваться для того, чтобы обнаруживать изменение трубопровода узла датчиков. Например, сдвиг отношения, такой как сдвиг отношения напряжений, может задаваться как разность между текущим значением 332 отношения LPO/RPO-напряжений и базовым значением 342 отношения LPO/RPO-напряжений. Сдвиг отношения может выражаться как процентная доля от базового значения 342 отношения LPO/RPO-напряжений.
Можно принимать во внимание, что практически осуществимая верификация узла датчиков должна указывать то, что изменение одного или более трубопроводов не возникает, когда изменение не возникает в трубопроводах. Также можно принимать во внимание, что это должно быть истиной при различных расходах, если верификация узла датчиков должна быть практически осуществимой в течение условий технологического расхода. Следующая таблица показывает то, что сдвиг отношения напряжений может быть относительно небольшим в полном диапазоне расходов. Более конкретно, каждый тип расходомера подвергнут условиям отсутствующего расхода и максимального расхода. Процентный сдвиг между значением отношения LPO/RPO-напряжений при условиях отсутствующего расхода и значением отношения LPO/RPO-напряжений при условиях максимального расхода вычисляется для каждого типа расходомера. Результаты сведены в таблицу и показаны в нижеприведенной таблице 1.
Таблица 1. Процентный сдвиг отношения напряжений между условиями отсутствующего расхода и максимального расхода в одном или более трубопроводов различных типов виброметров.
от нулевого расхода к максимальному тестовому расходу
Можно принимать во внимание, что процентные значения сдвига отношения напряжений являются очень небольшими для различных типов расходомеров, подвергнутых условиям отсутствующего расхода и максимального расхода, при которых изменение не возникает в одном или более трубопроводов. Это указывает то, что изменение отношения LPO/RPO-напряжений вероятно не обусловлено отличающимися расходами. Соответственно, отношение LPO/RPO-напряжений может представлять собой надежный индикатор условий одного или более трубопроводов. Например, маловероятно, что изменение отношения LPO/RPO-напряжений относительно базового отношения LPO/RPO-напряжений должно быть обусловлено любым изменением расхода материала, протекающего через один или более трубопроводов.
Надежный индикатор изменения одного или более трубопроводов узла датчиков, возможно, также должен коррелироваться с механическим свойством одного или более трубопроводов. Например, если изменение одного или более трубопроводов приводит к тому, что отношение LPO/RPO-напряжений имеет процентное изменение, которое равно процентному изменению жесткости, то отношение LPO/RPO-напряжений может представлять собой надежный индикатор изменения одного или более трубопроводов. Следующая таблица показывает то, что сдвиг отношения присутствует в различных типах измерителей, когда изменение одного или более трубопроводов вызывается посредством травителя в одном или более трубопроводов каждого типа измерителя.
Таблица 2. Результаты тестирования травления для типа A узла датчиков, функционально соединенного с типами 1 или 2 электронных схем измерителя.
Изменение жесткости (K)
Изменение жесткости (K)
VLPO/VRPO
KRPO/KLPO
KLPO/KRPO
Можно принимать во внимание, что сдвиг в отношении LPO/RPO-напряжений равен сдвигу в отношении LPO/RPO-жесткости. Также можно принимать во внимание, что сдвиг является независимым от электронных схем измерителя, присоединенных к узлу датчиков. Аналогичные результаты получаются с другим узлом датчиков, которые проиллюстрированы в следующей таблице 3.
Таблица 3. Результаты тестирования травления для типа B узла датчиков, функционально соединенного с типами 1 или 2 электронных схем измерителя.
Изменение жесткости (K)
Изменение жесткости (K)
VLPO/VRPO
KRPO/KLPO
KLPO/KRPO
Соответственно, параметр, такой как значение отношения LPO/RPO-напряжений, сигналов датчиков, предоставленных посредством узла датчиков, может обнаруживать изменение одного или более трубопроводов узла датчиков. Можно принимать во внимание, что могут использоваться другие параметры, включающие в себя параметры, которые основаны на токе, мощности, сопротивлении и т.д. сигналов датчиков из узла датчиков. Дополнительно или альтернативно, могут использоваться другие взаимосвязи параметров, такие как разность между параметрами сигналов датчиков. Дополнительно могут использоваться параметры сигналов, отличные от сигнала датчика, такие как напряжение возбуждающего сигнала. Параметр сигнала датчика не вычисляется и может согласованно обнаруживать изменения одного или более трубопроводов узла датчиков.
Фиг. 4 показывает график 400, иллюстрирующий соответствие между жесткостью узла датчиков и разностью между параметрами сигналов датчиков. Как показано на фиг. 4, график 400 включает в себя ось 410 прохода коррозии, ось 420 дельты напряжения измерительного датчика и ось 430 дельты жесткости. Ось 410 прохода коррозии является безразмерной, ось 420 дельты напряжения измерительного датчика задается в единицах Вольт, и ось 430 дельты жесткости задается в единицах Ньютон-метров на радиан, хотя могут использоваться любые подходящие единицы. График 400 также включает в себя график 440 дельты значений верификации узла датчиков. Как показано на фиг. 4, график 440 дельты значений верификации узла датчиков включает в себя график 442 дельты жесткости и график 444 дельты измерительного датчика.
Можно принимать во внимание, что график 442 дельты жесткости и график 444 дельты измерительного датчика являются приблизительно линейными относительно оси 410 прохода коррозии. Также можно принимать во внимание, что график 442 дельты жесткости и график 444 дельты измерительного датчика, хотя при различном масштабировании по абсциссе, имеют приблизительно соответствующий наклон. Соответственно, линейная взаимосвязь может присутствовать между значениями дельты напряжения измерительного датчика и значениями дельты жесткости, что указывает на то, что дельта напряжения измерительного датчика может надежно обнаруживать изменения трубопровода узла датчиков, которые могут вызывать сдвиг жесткости.
Как пояснено выше со ссылкой на фиг. 3, одно или более сравнений между текущим значением верификации узла датчиков, таким как одно из текущих значений 330 верификации узла датчиков, и базовым значением верификации узла датчиков, таким как одно из базовых значений 340 верификации узла датчиков, может использоваться для того, чтобы обнаруживать и идентифицировать изменение узла датчиков, такого как узел 10 датчиков, описанный выше. Например, значение верификации узла датчиков может быть основано на параметрах сигналов датчиков. В качестве иллюстрации, значение верификации узла датчиков может быть отношением LPO/RPO-напряжений, отношением DRV/LPO-напряжений или отношением DRV/RPO-напряжений, хотя может использоваться любое подходящее отношение параметров сигналов датчиков. Дополнительно или альтернативно, могут использоваться разности между параметрами сигналов датчиков. Соответственно, например, текущие значения 330 верификации узла датчиков и базовые значения 340 верификации узла датчиков могут быть основаны на параметре сигналов датчика, таком как LPO-напряжение, RPO-напряжение и/или DRV-напряжение.
Как также описывается в вышеприведенном пояснении, сдвиг значения верификации узла датчиков может использоваться для того, чтобы обнаруживать и идентифицировать изменение узла датчиков. Более конкретно, вышеприведенное пояснение описывает то, что изменение параметра сигналов датчика коррелируется с изменением жесткости узла датчиков. Соответственно, значение верификации узла датчиков, которое основано на параметрах сигналов датчиков, может использоваться для того, чтобы обнаруживать и идентифицировать изменение узла датчиков.
Корреляция между жесткостью узла датчиков также может быть конкретной для местоположения. Например, отношение DRV/LPO-напряжений может коррелироваться с жесткостью трубопровода между местоположением левого измерительного тензодатчика и местоположением формирователя сигналов управления на трубопроводе. Жесткость трубопровода между местоположением левого измерительного датчика и местоположением формирователя сигналов управления может называться "LPO-жесткостью". Соответственно, при аналогичных или идентичных условиях технологического процесса, трубопровод может подвергаться большему смещению в местоположении левого измерительного тензодатчика, которое может называться "LPO-смещением", по мере того, как LPO-жесткость снижается во времени для данного тока возбуждения. Это большее LPO-смещение может вызывать более высокое значение LPO-напряжения. Как результат, отношение DRV/LPO-напряжений может снижаться по мере того, как LPO-жесткость снижается. Аналогичные корреляции могут присутствовать между отношением DRV/RPO-напряжений и RPO-жесткостью.
Как пояснено выше, асимметричное изменение трубопровода может вызывать асимметричное изменение LPO-напряжения и RPO-напряжения. Аналогичные асимметричные изменения могут возникать с другими параметрами сигналов датчиков, такими как мощность, ток и т.д. Асимметричное изменение LPO-напряжения и RPO-напряжения может количественно определяться посредством использования текущего значения 332 отношения LPO/RPO-напряжений и базового значения 342 отношения LPO/RPO-напряжений. Например, текущее значение 332 отношения LPO/RPO-напряжений может сравниваться (например, вычитаться, делиться и т.д.) с базовым значением 342 отношения LPO/RPO-напряжений.
Симметричное изменение трубопровода узла датчиков может обнаруживаться посредством сравнения текущего значения верификации узла датчиков с базовым значением верификации узла датчиков. Например, текущее значение 334 отношения DRV/LPO-напряжений может сравниваться с базовым значением 344 отношения DRV/LPO-напряжений. Дополнительно или альтернативно, отношение напряжений 2DRV/(LPO*RPO) может аналогично использоваться для того, чтобы обнаруживать симметричное изменение трубопровода, поскольку симметричное снижение жесткости в трубопроводе может вызывать большее смещение как в левом измерительном тензодатчике, так и в правом измерительном тензодатчике. Тем не менее, вышеприведенные отношения, которые используют возбуждающий сигнал либо только одни из сигналов датчиков для того, чтобы обнаруживать симметричное изменение трубопровода, могут требовать того, что условия технологического процесса должны быть идентичными условиям, когда базовые значения отношения определены. Дополнительно или альтернативно, может использоваться вычисленное значение жесткости трубопровода, что может не требовать того, что условия должны быть идентичными условиям, когда базовое значение жесткости вычисляется. Эти и другие текущие значения верификации узла датчиков могут использоваться отдельно для того, чтобы обнаруживать изменение, и даже могут обнаруживать и различать между симметричным и асимметричным изменением, но не могут идентифицировать базовые условия, вызывающие изменение параметров сигналов датчиков.
Сдвиг или изменение значения верификации узла датчиков может задаваться как сравнение между текущим значением верификации узла датчиков и базовым значением верификации узла датчиков, которое указывает то, что изменение возникает в трубопроводе узла датчиков. Этот сдвиг или изменение значения верификации узла датчиков может характеризоваться как "низкое" или "снижение", "высокое" или "увеличение" либо "нулевое" или "статическое" и т.д. Дополнительно или альтернативно, могут использоваться количественные значения. Комбинация двух или более сдвигов или изменений значения верификации узла датчиков может использоваться для того, чтобы идентифицировать базовые условия трубопровода.
Например, как пояснено выше, "низкий" сдвиг отношения DRV/LPO-напряжений может указывать то, что физическая жесткость трубопроводов 130, 130' между формирователем 180 сигналов управления и левым измерительным тензодатчиком 170l снижается. "Высокий" сдвиг отношения DRV/RPO-напряжений может указывать то, что физическая жесткость трубопроводов 130, 130' между формирователем 180 сигналов управления и правым измерительным тензодатчиком 170l увеличивается. Комбинация "низкого" сдвига отношения DRV/LPO-напряжений и "высокого" сдвига отношения DRV/RPO-напряжений может коррелироваться с конкретными условиями, такими как процесс, который вызывает коррозию трубопровода рядом с впускным отверстием трубопровода и покрытие трубопровода рядом с выпускным отверстием трубопровода.
Система 302 обработки дополнительно может обрабатывать эти значения, чтобы формировать индикатор переключения, в котором указывается только увеличение или уменьшение физической жесткости трубопроводов 130, 130' между формирователем 180 сигналов управления и левым измерительным тензодатчиком 170l. Эти значения и/или индикаторы переключения могут использоваться для того, чтобы определять базовое изменение трубопроводов 130, 130', как показано в нижеприведенной таблице истинности.
UN=неизменные
CT=покрытие
E=эрозия
C=коррозия
D=повреждение
Как можно видеть, комбинации отношения LPO/RPO-напряжений, изменения LPO-жесткости и изменения RPO-жесткости могут использоваться для того, чтобы различать между различными возможными изменениями трубопроводов 130, 130'. Например, случай J и N имеют отношение LPO/RPO-напряжений, которое является "низким справа", и изменение RPO-жесткости, которое является "низким". Тем не менее, случай J имеет изменение LPO-жесткости "низкое", тогда как случай N имеет изменение LPO-жесткости "высокое". Случай J указывается в качестве возможной эрозии/коррозии трубопроводов 130, 130', тогда как случай N указывается в качестве возможного покрытия трубопроводов 130, 130'.
Хотя вышеприведенная таблица использует изменение LPO-жесткости, изменение RPO-жесткости и отношение LPO/RPO-напряжений, чтобы определять условия трубопроводов 130, 130', любые подходящие средства, такие как альтернативные таблицы, логика, объекты, взаимосвязи, схемы, процессоры, процедуры и т.п., могут использоваться для того, чтобы определять условия в трубопроводе. Например, только изменение LPO-жесткости и изменение RPO-жесткости могут использоваться для того, чтобы определять условия трубопроводов 130, 130'. Тем не менее, можно принимать во внимание, что использование отношения LPO/RPO-напряжений может предоставлять возможность более конкретных определений условий трубопроводов 130, 130'.
Дополнительно или альтернативно, фактические значения изменения LPO-жесткости, изменения RPO-жесткости и/или отношения LPO/RPO-напряжений могут использоваться вместо индикатора переключения, чтобы определять условия трубопровода. Например, условия, определенные посредством вышеприведенной таблицы, могут дополняться посредством дополнительных этапов, которые определяют, например, то, что случай J с большей вероятностью должен представлять собой коррозию, а не эрозию, если отношение LPO/RPO-напряжений является относительно небольшим "справа низким". Иными словами, относительно небольшое "справа низкое" отношение LPO/RPO-напряжений может быть обусловлено более однородным характером коррозии по сравнению с эрозией, которая может быть более преобладающей во впускном отверстии трубопровода.
Статистические способы, которые вычисляют вероятность результата, могут использоваться для того, чтобы обнаруживать изменение виброметра, но, вследствие своей сложности, не могут выполняться посредством электронных схем 20 измерителя. Например, P- и T-статистика может использоваться для того, чтобы тестировать то, удовлетворяется или нет нулевая гипотеза для данного набора данных. Отклонение нулевой гипотезы не определяет то, существуют или нет условия в виброметре, но при этом она является ложной в отношении того, что возникает отсутствие условий. В случае верификации узла датчиков, нулевая гипотеза может задаваться следующим образом: "текущий результат верификации узла датчиков имеет идентичное среднее значение с базовым результатом верификации узла датчиков". Если эта нулевая гипотеза опровергается, то можно предполагать, что среднее значение текущего результата верификации узла датчиков не является идентичным базовому результату верификации узла датчиков вследствие изменения виброметра.
В качестве иллюстрации, в t-тесте, t-значение может вычисляться с использованием следующего уравнения:
 , [6]
, [6]
где:
μ0 является некоторым указанным значением;
 является выборочным средним значением;
является выборочным средним значением;
s является выборочным среднеквадратическим отклонением; и
n является размером выборки.
В контексте верификации узла датчиков, μ0 является базовым значением верификации узла датчиков, таким как базовое значение отношения LPO/RPO-напряжений. Измерения для верификации узла датчиков используются для того, чтобы вычислять выборочное среднее значение и выборочное среднеквадратическое отклонение s для сравнения с базовым значением верификации узла датчиков. Число измерений для верификации узла датчиков является размером n выборки. T-тест также типично включает в себя степень свободы, которая, для вышеприведенного уравнения [6], задается как n-1.
Как пояснено выше, t-тест может использоваться для того, чтобы тестировать нулевую гипотезу, которая, для верификации узла датчиков, может задаваться в отношении того, равно или нет выборочное среднее значение опорному значению верификации узла датчиков. Чтобы тестировать нулевую гипотезу, P-значение может вычисляться с использованием известного распределения t-значения. Чтобы тестировать нулевую гипотезу, P-значение сравнивается с уровнем α значимости. Уровень α значимости типично задается равным небольшому значению, такому как, например, 0,01, 0,05 или 0,10. Если P-значение меньше или равно уровню α значимости, то нулевая гипотеза отклоняется для альтернативной гипотезы. Поскольку нулевая гипотеза задается "как текущий результат верификации узла датчиков имеет идентичное среднее значение с опорными результатами верификации узла датчиков", альтернативная гипотеза заключается в том, что текущая верификация узла датчиков не имеет идентичного среднего значения, и в силу этого изменение возникает в измерителе.
Тем не менее, P-значение затруднительно вычислять с ограниченными вычислительными ресурсами. Например, P-значение может вычисляться на компьютерной рабочей станции с операционной системой и статистическим программным обеспечением, но не может легко вычисляться во встроенной системе. Электронные схемы 20 измерителя, описанные выше, могут представлять собой встроенную систему с ограниченными вычислительными ресурсами. Помимо этого, возможность отклонять нулевую гипотезу на месте или в реальном времени в электронных схемах измерителя может предотвращать отправку, посредством электронных схем 20 измерителя ложных аварийных оповещений, при одновременном корректном обнаружении изменения трубопроводов 130, 130', что представляет собой существенное улучшение по сравнению с использованием предварительно определенных пределов по аварийным оповещениям.
С этой целью, доверительный интервал, который использует ограниченные вычислительные ресурсы электронных схем 20 измерителя, используется вместо P-значения. Как результат, доверительный интервал может вычисляться с использованием встроенного кода в электронных схемах 20 измерителя. Например, электронные схемы 20 измерителя могут иметь текущее значение верификации узла датчиков и значение среднеквадратического отклонения текущего значения верификации узла датчиков, сохраненные в двух регистрах. Можно принимать во внимание, что t-значение, описанное выше, может вычисляться с использованием текущего значения верификации узла датчиков посредством использования уровня α значимости и степени свободы. В качестве примера, уровень α значимости может задаваться равным 0,01, что является 99%-м доверительным уровнем. Число тестов для верификации узла датчиков может задаваться равным 5. Соответственно, объединенная в пул степень свободы определяется равной 2*(5-1)=8. Двустороннее t-значение Стьюдента может вычисляться из уровня α значимости и объединенной в пул степени свободы с использованием функции на основе t-значения Стьюдента следующим образом:
 . [7]
. [7]
Также может использоваться объединенное в пул среднеквадратическое отклонение значений верификации узла датчиков, ассоциированных с левым и правым измерительными тензодатчиками 170l, 170r. В общем случае, вычисление объединенного в пул среднеквадратического отклонения может усложняться. Тем не менее, вследствие электронных схем 20 измерителя, сохраняющих среднеквадратическое отклонение значения верификации узла датчиков в регистрах, объединенное в пул среднеквадратическое отклонение может быть просто сохраненным среднеквадратическим отклонением. Также может вычисляться объединенная в пул среднеквадратическая ошибка, которая задается следующим образом:
 [8]
[8]

 .
.
Диапазон доверительного интервала может вычисляться с использованием вышеуказанной определенной среднеквадратической ошибки и t-значения следующим образом:
 ; [9]
; [9]
 .
.
В завершение, доверительный интервал может вычисляться с использованием среднего значения измерений для верификации узла датчиков и диапазона доверительного интервала, что показывается в следующем уравнении:
 . [10]
. [10]
Доверительный интервал может использоваться для того, чтобы тестировать нулевую гипотезу посредством определения того, включает или нет доверительный интервал в себя 0,0. Если доверительный интервал включает в себя 0,0, то нулевая гипотеза не отклоняется, и верификация узла датчиков проходит. Если доверительный интервал не включает в себя 0,0, то нулевая гипотеза может отклоняться, и неисправность верификации узла датчиков может отправляться.
Посредством использования доверительного интервала вместо P-значения, когда электронные схемы 20 измерителя сохраняют значение верификации узла датчиков и значение среднеквадратического отклонения значения верификации узла датчиков, вычисления являются относительно простыми и могут выполняться с использованием встроенного кода. Например, электронные схемы 20 измерителя, которые могут не иметь достаточных вычислительных ресурсов для того, чтобы вычислять P-значение, могут вычислять доверительный интервал, чтобы выполнять статистический анализ на месте или в реальном времени. Также можно принимать во внимание, что доверительный интервал может использоваться для того, чтобы тестировать нулевую гипотезу с требуемым доверительным уровнем.
В дополнение к доверительному интервалу, мертвая зона смещения может задаваться вокруг нуля, чтобы учитывать смещение в измерениях значения верификации узла датчиков. Смещение в измерениях значения верификации узла датчиков может быть обусловлено монтажом, плотностью, температурными градиентами или другими условиями виброметра, которые могут затрагивать измерения для верификации узла датчиков. Эта мертвая зона смещения в t-тесте является значением вокруг нуля, для которого небольшое смещение с небольшим варьированием, которое в противном случае должно приводить к тому, что проверка доверительного интервала отклоняет гипотезу, не отклоняет гипотезу. Соответственно, эта мертвая зона смещения может задаваться равной значению, которое сокращает число ложных аварийных оповещений, отправленных посредством электронных схем 20 измерителя.
В примере доверительного интервала, который сравнивается с нулем, мертвая зона смещения является диапазоном вокруг нуля, причем если нуль не находится в пределах доверительного интервала, а участок мертвой зоны смещения находится в пределах доверительного интервала, то нулевая гипотеза не должна отклоняться. Математически, этот тест может выражаться как то, меньше или нет среднее значение измерений для верификации узла датчиков, которое может называться "средним значением верификации узла датчиков", мертвой зоны смещения. Альтернативно, с использованием вышеописанной терминологии: если  , где dbbias является мертвой зоной смещения, то нулевая гипотеза не может отклоняться.
, где dbbias является мертвой зоной смещения, то нулевая гипотеза не может отклоняться.
Мертвая зона смещения может реализовываться отдельно или в сочетании с другими мертвыми зонами. Например, мертвая зона смещения может реализовываться в сочетании с мертвой зоной варьирования. В одном примере, мертвая зона варьирования может определяться из  , где dbvibration является мертвой зоной варьирования. Мертвая зона варьирования может сравниваться со среднеквадратическим отклонением значения верификации узла датчиков для того, чтобы определять то, должна или нет отклоняться нулевая гипотеза. В примере, мертвая зона смещения может сравниваться, как пояснено выше, и мертвая зона варьирования может сравниваться со среднеквадратическим отклонением следующим образом: если , и если
, где dbvibration является мертвой зоной варьирования. Мертвая зона варьирования может сравниваться со среднеквадратическим отклонением значения верификации узла датчиков для того, чтобы определять то, должна или нет отклоняться нулевая гипотеза. В примере, мертвая зона смещения может сравниваться, как пояснено выше, и мертвая зона варьирования может сравниваться со среднеквадратическим отклонением следующим образом: если , и если  , то нулевая гипотеза не может отклоняться. Вышеприведенный тест может использоваться после того, как нулевая гипотеза отклоняется посредством проверки доверительного интервала. Альтернативно, если , и если , то среднее значение верификации узла датчиков задается равным нулю, и варьирование должно быть равно мертвой зоне варьирования.
, то нулевая гипотеза не может отклоняться. Вышеприведенный тест может использоваться после того, как нулевая гипотеза отклоняется посредством проверки доверительного интервала. Альтернативно, если , и если , то среднее значение верификации узла датчиков задается равным нулю, и варьирование должно быть равно мертвой зоне варьирования.
Предпочтительный способ тестирования нулевой гипотезы может использовать два доверительных интервала, которые не основываются на объединенном в пул среднеквадратическом отклонении. Использование двух доверительных интервалов может быть предпочтительным, при этом нельзя предположить, что среднеквадратическое отклонение базовых измерений должно быть идентичным среднеквадратическому отклонению измерений для верификации узла датчиков. Первый доверительный интервал (например, базовый доверительный интервал) может состоять из базового среднего значения и базового среднеквадратического отклонения. Второй доверительный интервал (например, измеренный или используемый для верификации измерителя доверительный интервал) может состоять из измеренного среднего значения и измеренного среднеквадратического отклонения измерений, проведенных во время верификации узла датчиков.
В этом примере, первый доверительный интервал может быть примерным базовым значением верификации узла датчиков, хотя любое подходящее значение, включающее в себя значение вероятности, может быть базовым значением верификации узла датчиков. Второй доверительный интервал может быть вероятностью, которая определяется из измеренного среднего значения и измеренного среднеквадратического отклонения. Иными словами, измеренное среднее значение может быть значением центральной тенденции, и измеренное среднеквадратическое отклонение может быть значением дисперсии, используемым для того, чтобы верифицировать узел датчиков, такой как узел 10 датчиков, поясненный выше, посредством сравнения вероятности с базовым значением верификации узла датчиков, как поясняется ниже.
Для двух перекрывающихся доверительных интервалов, изменение (например, повреждение) может не обнаруживаться, если первой и второй доверительные интервалы перекрываются. В противном случае, изменение обнаруживается. Перекрытие двух доверительных интервалов может определяться с использованием любого подходящего способа. Например, перекрытие двух доверительных интервалов может определяться посредством сравнения разности между измеренными и базовыми средними значениями и разности между измеренными и базовыми значениями среднеквадратического отклонения. Сравнение может включать в себя члены, называемые просто "вычисленным значением левой стороны (LHS)" и "вычисленным значением правой стороны (RHS)", хотя могут использоваться любые подходящие члены. Если LHS-значение меньше RHS-значения, перекрытие присутствует, и повреждение, соответственно, может обнаруживаться. В противном случае, перекрытие не присутствует, и повреждение в силу этого не может обнаруживаться. Следующие уравнения [11]-[13] иллюстрируют этот способ:
; [11]
; и [12]
 . [13]
. [13]
где:
μmeasured является средним значением (т.е. примерным значением центральной тенденции) относительно измеренных значений верификации узла датчиков;
μbaseline является средним значением (т.е. примерным значением центральной тенденции) относительно базовых значений, выполняемых для последующих верификаций узла датчиков;
σmeasured является значением среднеквадратического отклонения (т.е. примерным значением дисперсии) измеренных значений верификации узла датчиков;
σbaseline является значением среднеквадратического отклонения (т.е. примерным значением дисперсии) относительно базовых значений, измеряемых для последующих верификаций узла датчиков.
Коэффициент в "2" может использоваться при вычислении RHS-значения, чтобы учитывать 95%-ю вероятность в обоих доверительных интервалах. Могут использоваться другие значения. Можно принимать во внимание, что средние значения относительно измеренных значений верификации узла датчиков и базовых значений могут определяться посредством любого подходящего способа. В следующем уравнении [14], среднеквадратическое отклонение базовых значений определяется посредством умножения значения мертвой зоны на среднее значение базовых значений:
 . [14]
. [14]
Соответственно, хоть и вычисляется, когда проверка доверительного интервала выполняется, нулевая гипотеза может не отклоняться вследствие смещения в измерениях для верификации узла датчиков.
Фиг. 5 показывает способ 500 использования параметров сигналов датчиков узла датчиков, такого как узел 10 датчиков, описанный выше, для того, чтобы верифицировать узел датчиков. Как показано на фиг. 5, способ 500 вычисляет значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков на этапе 510. Сигналы датчиков этапа 510 могут представлять собой сигналы 100 датчиков, описанные выше со ссылкой на фиг. 1 и 2, хотя могут использоваться любые подходящие сигналы датчиков. На этапе 520, способ 500 сравнивает вычисленное значение взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков с базовым значением взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков. Сравнение может проводиться посредством системы 302 обработки, поясненной выше, хотя может использоваться любой подходящий процессор или система обработки.
На этапе 510, вычисление значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков может содержать вычисление значения взаимосвязи параметров сигналов датчиков между значением напряжения сигнала левого измерительного тензодатчика и значением напряжения сигнала правого измерительного тензодатчика. Дополнительно, вычисление значения взаимосвязи параметров сигналов датчиков между двумя сигналами датчиков может содержать вычисление одного из отношения и разности между двумя значениями параметров сигналов датчиков для двух сигналов датчиков. Например, взаимосвязь параметров сигналов датчиков может содержать уравнение [5], описанное выше, хотя может использоваться разность между напряжением сигнала левого измерительного тензодатчика и напряжением сигнала правого измерительного тензодатчика. В другом альтернативном примере, взаимосвязь параметров сигналов датчиков может быть отношением между напряжением сигнала левого и правого измерительного тензодатчика, при этом напряжение сигнала правого измерительного тензодатчика находится в числителе.
Дополнительно или альтернативно, сравнение вычисленного значения взаимосвязи параметров сигналов датчиков с базовым значением взаимосвязи параметров сигналов датчиков может содержать вычисление разности между вычисленным значением взаимосвязи параметров сигналов датчиков и базовым значением взаимосвязи параметров сигналов датчиков. Например, если взаимосвязь параметров сигналов датчиков является вышеприведенным уравнением [5], то сравнение может задаваться между взаимосвязью параметров сигналов датчиков, например:
 . [15]
. [15]
где:
 является дельтой или сдвигом взаимосвязи параметров сигналов датчиков;
является дельтой или сдвигом взаимосвязи параметров сигналов датчиков;
 является текущей взаимосвязью параметров сигналов датчиков; и
является текущей взаимосвязью параметров сигналов датчиков; и
 является базовой взаимосвязью параметров сигналов датчиков.
является базовой взаимосвязью параметров сигналов датчиков.
Если вышеуказанное значение дельты значений взаимосвязи параметров сигналов датчиков является номинальным (например, равным или около нуля, в пределах допуска около нуля и т.д.), то способ 400 может логически приходить к выводу, указывать, сохранять и т.п. то, что изменение трубопровода или узла датчиков не обнаружено. Если значение дельты взаимосвязи параметров сигналов датчиков не является номинальным, то способ 500 может приходить к выводу, указывать, сохранять и т.п. то, что изменение трубопровода или узла датчиков обнаружено.
Как пояснено выше, два сигнала датчиков могут содержать два из возбуждающего сигнала, сигнала левого измерительного тензодатчика и сигнала правого измерительного тензодатчика. Например, в вышеприведенном уравнении [5], два сигнала датчиков представляют собой сигналы левого и правого измерительных тензодатчиков, при этом параметры сигналов датчиков являются напряжениями сигналов левого и правого измерительных тензодатчиков. Альтернативно, например, два сигнала датчиков могут содержать возбуждающий сигнал и один из сигналов левого и правого датчика. В качестве иллюстрации, может использоваться отношение напряжения возбуждающего сигнала и напряжения сигнала левого измерительного тензодатчика. Тем не менее, как пояснено выше, использование отношения напряжения возбуждающего сигнала и напряжения сигнала левого измерительного тензодатчика может требовать того, что процесс потребителя должен быть завершен, и того, что условия, используемые для вычисления значения взаимосвязи параметров сигналов датчиков, возможно, должны быть идентичными условиям, используемым для того, чтобы получать базовое значение взаимосвязи параметров сигналов датчиков.
Способ 500 дополнительно может содержать определение условий узла датчиков на основе сравнения вычисленного значения взаимосвязи электрических параметров и базового значения взаимосвязи электрических параметров между двумя или более сигналами датчиков. Например, дельта значений параметров сигналов датчиков, которая является ненулевой между сигналами левого и правого датчика, может указывать то, что асимметричное изменение возникает. Это может быть обусловлено, например, неоднородным травлением, эрозией и т.п. Можно принимать во внимание, что если дельта взаимосвязи параметров сигналов датчиков равна нулю или находится в пределах диапазона допусков, то можно приходить к выводу, что изменение не возникает, или что симметричное изменение возникает. Соответственно, способ 500 может продолжаться для того, чтобы дополнительно определять то, возникает или нет симметричное изменение, например, посредством завершения процесса потребителя и определения того, изменяется или нет взаимосвязь параметров сигналов датчиков между возбуждающим сигналом и сигналом левого или правого измерительного тензодатчика относительно базовой линии. Дополнительно или альтернативно, способ 500 дополнительно может определять то, что значения параметров трубопровода, такие как жесткость, демпфирование и т.п., изменяются, чтобы дополнительно определять условия узла датчиков.
Как пояснено выше, может использоваться более одного сравнения между значением верификации узла датчиков. Дополнительно, также может использоваться изменение значения верификации узла датчиков. Например, комбинация сдвигов верификации узла датчиков может использоваться для того, чтобы обнаруживать и идентифицировать условия трубопровода в узле датчиков, как демонстрируется далее.
Фиг. 6 показывает способ 600 использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Как показано на фиг. 6, способ 600 определяет текущее первое значение верификации узла датчиков на этапе 610. На этапе 620, способ 600 сравнивает текущее первое значение верификации узла датчиков с базовым первым значением верификации узла датчиков для того, чтобы определять первый сдвиг верификации узла датчиков. Способ 600, на этапе 630, также сравнивает текущее второе значение верификации узла датчиков с базовым вторым значением верификации узла датчиков для того, чтобы определять первый сдвиг верификации узла датчиков. На этапе 640, способ 600 определяет условия трубопровода на основе первого сдвига верификации узла датчиков и второго сдвига верификации узла. По меньшей мере, одно из текущего первого значения верификации узла датчиков и текущего второго значения верификации узла датчиков состоит из значения взаимосвязи параметров сигналов датчиков. Способ 600 может осуществляться в электронных схемах измерителя, таких как электронные схемы 20 измерителя, поясненные выше. Способ 600 также может включать в себя дополнительные этапы и/или различные подэтапы.
Например, первый сдвиг верификации узла датчиков может представлять изменение физической жесткости трубопровода между формирователем сигналов управления и левым измерительным датчиком, и второй сдвиг верификации узла датчиков представляет изменение физической жесткости трубопровода между формирователем сигналов управления и правым измерительным датчиком. В качестве иллюстрации, как пояснено выше, изменение физической жесткости трубопровода между формирователем сигналов управления и левым измерительным тензодатчиком может коррелироваться (например, в линейной взаимосвязи) со значением отношения DRV/LPO-напряжений, и физическая жесткость трубопровода между формирователем сигналов управления и правым измерительным датчиком может коррелироваться (например, в линейной взаимосвязи) со значением отношения DRV/LPO-напряжений.
Значение взаимосвязи параметров сигналов датчиков может представлять собой одно из отношения и разности двух значений параметров сигналов датчиков. Помимо этого, взаимосвязь параметров сигналов датчиков трубопровода может определяться на основе двух из параметра сигнала левого измерительного тензодатчика, параметра сигнала правого измерительного тензодатчика и параметра возбуждающего сигнала. Например, могут использоваться значение отношения DRV/LPO-напряжений и/или значение отношения DRV/LPO-напряжений. Тем не менее, также альтернативно или дополнительно могут использоваться разности, такие как разностное значение DRV/LPO-напряжений и разностное значение DRV/RPO-напряжений. Отношения могут быть преимущественными, поскольку значение отношения может не зависеть от общего множителя числителя и знаменателя, тогда как общий множитель может эффективно масштабировать разностное значение.
Способ 600 также может предоставлять аварийное оповещение на основе определения условий трубопровода. Например, электронные схемы 20 измерителя, поясненные выше, могут отправлять сообщение по порту 26, поясненному выше. Дополнительно или альтернативно, способ 600 может отображать сообщение в пользовательском интерфейсе, соединенном с электронными схемами измерителя. Как пояснено выше, условия трубопровода содержат, по меньшей мере, одно из эрозии, коррозии, повреждения и покрытия трубопровода виброметра.
Из вышеприведенного пояснения можно принимать во внимание, что условия могут обнаруживаться и идентифицироваться посредством использования комбинаций сдвигов верификации узла датчиков, которые определяются на основе сравнений между текущими значениями верификации узла датчиков и базовым значением верификации узла датчиков. Сравнение может быть любым подходящим сравнением, включающим в себя статистическое сравнение, как проиллюстрировано в нижеприведенном пояснении, которое может использоваться или может не использоваться в комбинации с другими сравнениями, которые могут использовать или могут не использовать статистические способы.
Фиг. 7 показывает способ 700 использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Как показано на фиг. 7, способ 700 получает значение центральной тенденции и значение дисперсии из системы хранения данных на этапе 710. Способ 700 может осуществляться в электронных схемах измерителя, таких как электронные схемы 20 измерителя. Соответственно, обрабатывающая система, такая как система 302 обработки, описанная выше, может получать значение центральной тенденции из системы хранения данных, такой как система 304 хранения данных, описанная выше, которая может использоваться. На этапе 720, способ 700 определяет вероятность на основе значения центральной тенденции и значения дисперсии, чтобы обнаруживать то, отличается или нет значение центральной тенденции от базового значения.
В способе 700, значение верификации узла датчиков может быть основано на значениях параметров сигналов датчиков. Например, значение верификации узла датчиков может представлять собой одно из значения отношения LPO/RPO-напряжений, значения отношения DRV/LPO-напряжений и значения отношения DRV/RPO-напряжений, поясненного выше. Значения параметров сигналов датчиков могут иметь сигналы датчиков из узла датчиков, такого как узел 10 датчиков, описанный выше. Соответственно, значение верификации узла датчиков может использоваться для того, чтобы верифицировать узел 10 датчиков или любой подходящий узел датчиков.
Способ 700 также может определять вероятность на основе значения центральной тенденции и значения дисперсии, что содержит вычисление t-значения и вычисление вероятности с использованием t-значения. Например, определение вероятности на основе значения центральной тенденции и значения дисперсии может содержать вычисление степени свободы на основе числа измерений для верификации узла датчиков. Определение вероятности на основе жесткости измерителя может содержать вычисление среднеквадратической ошибки на основе среднеквадратического отклонения и степеней свободы, как описано выше. Например, среднеквадратическая ошибка может вычисляться с использованием вышеприведенного уравнения [8]. Значение дисперсии может быть объединенным в пул среднеквадратическим отклонением, содержащим среднеквадратическое отклонение измерений для верификации узла датчиков и базовых измерений для верификации узла датчиков. Вероятность может быть доверительным интервалом значения центральной тенденции, таким как доверительный интервал, вычисленный с использованием вышеприведенного уравнения [10].
Как пояснено выше, может использоваться более одной вероятности. Например, первая вероятность, такая как первый доверительный интервал, может быть основана на базовых измерениях для верификации узла датчиков, и вторая вероятность, такая как второй доверительный интервал, может быть основана на измерениях, проведенных для верификации узла датчиков. В качестве иллюстрации, первый доверительный интервал может вычисляться из среднего значения и среднеквадратического отклонения базового значения верификации узла датчиков. Например, среднее значение относительно базового значения верификации узла датчиков может быть средним значением базовых измерений для верификации узла датчиков, и среднеквадратическое отклонение базового значения верификации узла датчиков может быть значением среднеквадратического отклонения базовых измерений для верификации узла датчиков.
Соответственно, способ 700 может определять вероятность на основе значения центральной тенденции и значения дисперсии посредством определения доверительного интервала на основе значения центральной тенденции и значения дисперсии. Можно принимать во внимание, что базовое значение верификации узла датчиков может содержать значение центральной тенденции и значение дисперсии базового значения верификации узла датчиков. Значение центральной тенденции базового значения верификации узла датчиков может быть средним значением относительно базового значения верификации узла датчиков, и значение дисперсии базового значения верификации узла датчиков может быть среднеквадратическим отклонением базового значения верификации узла датчиков.
Способ 700 может обнаруживать то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков, посредством определения того, не перекрывается либо перекрывается вероятность на основе значения центральной тенденции и значения дисперсии с вероятностью базового значения верификации узла датчиков. Вероятность может быть основана на значении центральной тенденции, и значение дисперсии содержит доверительный интервал, определенный на основе значения центральной тенденции и значения дисперсии, и вероятность базового значения верификации узла датчиков содержит доверительный интервал, определенный на основе базовых измерений для верификации узла датчиков. Способ 700 может определять то, что вероятность значения центральной тенденции и значения дисперсии, полученных из устройства хранения данных, перекрывается с вероятностью базового значения верификации узла датчиков, если уравнение [13] является истиной. Способ 700 может определять базовое среднеквадратическое отклонение с использованием вышеприведенного уравнения [14].
Виброметр 5, электронные схемы 20 измерителя и способы 500-700, описанные выше, используют параметры сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Например, способ 500, осуществляемый в электронных схемах 20 измерителя, может определять то, что текущее значение  взаимосвязи параметров сигналов датчиков не является идентичным базовому значению
взаимосвязи параметров сигналов датчиков не является идентичным базовому значению  взаимосвязи параметров сигналов датчиков. Текущее значение взаимосвязи параметров сигналов датчиков означает значение, вычисленное в ходе серии верификации узла датчиков, и может называться "вычисленным значением взаимосвязи параметров сигналов датчиков". Как результат, электронные схемы 20 измерителя могут определять то, что изменение, такое как асимметричное изменение, возникает в узле 10 датчиков. Изменение может быть обусловлено такими условиями, как коррозия, осаждение, эрозия, повреждение, трещины и т.п.
взаимосвязи параметров сигналов датчиков. Текущее значение взаимосвязи параметров сигналов датчиков означает значение, вычисленное в ходе серии верификации узла датчиков, и может называться "вычисленным значением взаимосвязи параметров сигналов датчиков". Как результат, электронные схемы 20 измерителя могут определять то, что изменение, такое как асимметричное изменение, возникает в узле 10 датчиков. Изменение может быть обусловлено такими условиями, как коррозия, осаждение, эрозия, повреждение, трещины и т.п.
Способ 500 также может выполнять дополнительные верификации, такие как верификации на основе взаимосвязи параметров возбуждающих сигналов с сигналами измерительного тензодатчика, поясненной выше, определение значения параметра трубопровода (например, жесткости, остаточной гибкости, массы и т.д.) и т.п., чтобы дополнительно определять условия, вызывающие изменение узла датчиков. Например, дополнительная верификация узла датчиков может определять то, что даже если асимметричное изменение не обнаруживается только посредством использования параметров сигналов измерительных тензодатчиков, то дополнительные этапы могут определять то, возникает или нет симметричное изменение. В другом примере, дополнительная верификация узла датчиков может определять то, какой тип асимметричного изменения возникает. В этом примере, параметры только сигналов измерительных тензодатчиков могут использоваться для того, чтобы определять то, что асимметричное изменение возникает в узле датчиков, и дополнительная верификация может определять то, какие условия вызывают асимметричное изменение. В качестве иллюстрации, травление может вызывать только асимметричное изменение, тогда как эрозия может вызывать асимметричное и симметричное изменение.
Способы 500-700 также могут выполнять дополнительные этапы на основе верификации(й). Например, способ 500 может помечать флагом узел датчиков, такой как узел 10 датчиков, описанный выше, как имеющий условия. Дополнительно или альтернативно, способ 500 может предоставлять диагностику, включающую в себя информацию относительно того, какими должны быть условия с большой вероятностью. В качестве иллюстрации, способ 500 может инструктировать электронным схемам 20 измерителя отправлять сообщение по порту 26 в удаленный вычислительный ресурс, такой как сеть, терминал, компьютерная станция заказчика и т.п., касательно того, что условия обнаружены, и что обнаруженные условия с большой вероятностью должны представлять собой коррозию трубопроводов в узле датчиков. Дополнительно или альтернативно, электронные схемы 20 измерителя могут инструктировать части отображения, составляющей или функционально соединенной с электронными схемами 20 измерителя, отображать сообщение, окно, текстовый баннер и т.п., указывающий то, что условия узла датчиков обнаружены, и/или информацию относительно условий.
Поскольку значения параметров сигналов датчиков могут определяться с относительно незначительными вычислительными ресурсами, ресурсы электронных схем 20 измерителя могут использоваться более эффективно. Помимо этого, значения взаимосвязи параметров сигналов датчиков могут вычисляться без завершения процесса потребителя. Например, как пояснено выше, значения взаимосвязи параметров сигналов датчиков, в частности, значения взаимосвязи параметров сигналов измерительных тензодатчиков, являются согласованными при нулевых расходах и максимальных расходах для данного неизменного узла датчиков. Помимо этого, также могут использоваться статистические способы, которые требуют небольших вычислительных ресурсов. Дополнительно, при вычислении значения взаимосвязи параметров сигналов датчиков, такого как значение взаимосвязи параметров сигналов измерительных тензодатчиков, условия (например, температура, давление и т.д.) узла датчиков и/или электронных схем измерителя, возможно, не должны быть идентичными условиям узла датчиков и/или электронных схем измерителя, когда базовое значение взаимосвязи параметров сигналов датчиков определяется.
Подробные описания вышеуказанных вариантов осуществления не представляют собой исчерпывающие описания всех вариантов осуществления, предполагаемых авторами изобретения как находящиеся в пределах объема настоящего описания. Фактически, специалисты в данной области техники должны признавать, что определенные элементы вышеописанных вариантов осуществления могут комбинироваться или исключаться различными способами для того, чтобы создавать дополнительные варианты осуществления, и такие дополнительные варианты осуществления попадают в пределы объема и идей настоящего описания. Специалистам в данной области техники также должно быть очевидным, что вышеописанные варианты осуществления могут комбинироваться полностью или частично, чтобы создавать дополнительные варианты осуществления в пределах объема и идей настоящего описания.
Таким образом, хотя конкретные варианты осуществления описываются в данном документе в качестве иллюстрации, различные эквивалентные модификации являются возможными в пределах объема настоящего описания, как должны признавать специалисты в данной области техники. Идеи, предусмотренные в данном документе, могут применяться к другим виброметрам, способам работы электронных схем измерителя для использования параметров сигнала датчика, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков, а не только к вариантам осуществления, описанным выше и показанным на прилагаемых чертежах. Соответственно, объем вариантов осуществления, описанный выше, должен определяться из прилагаемой формулы изобретения.
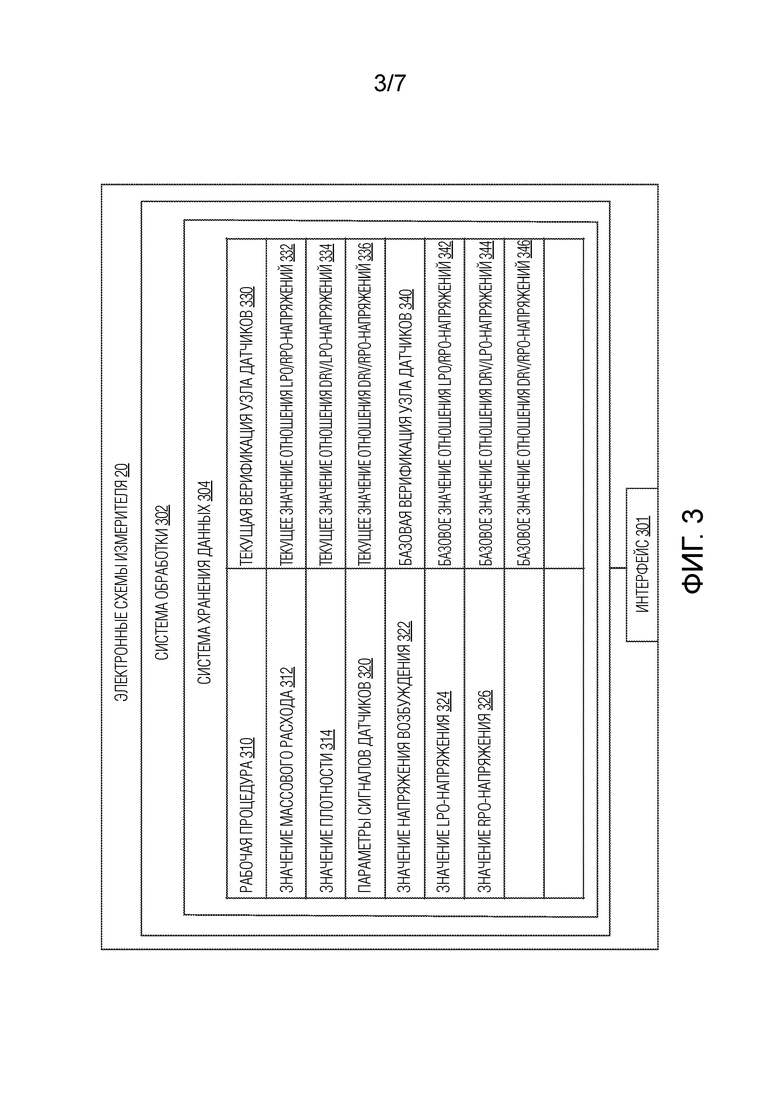
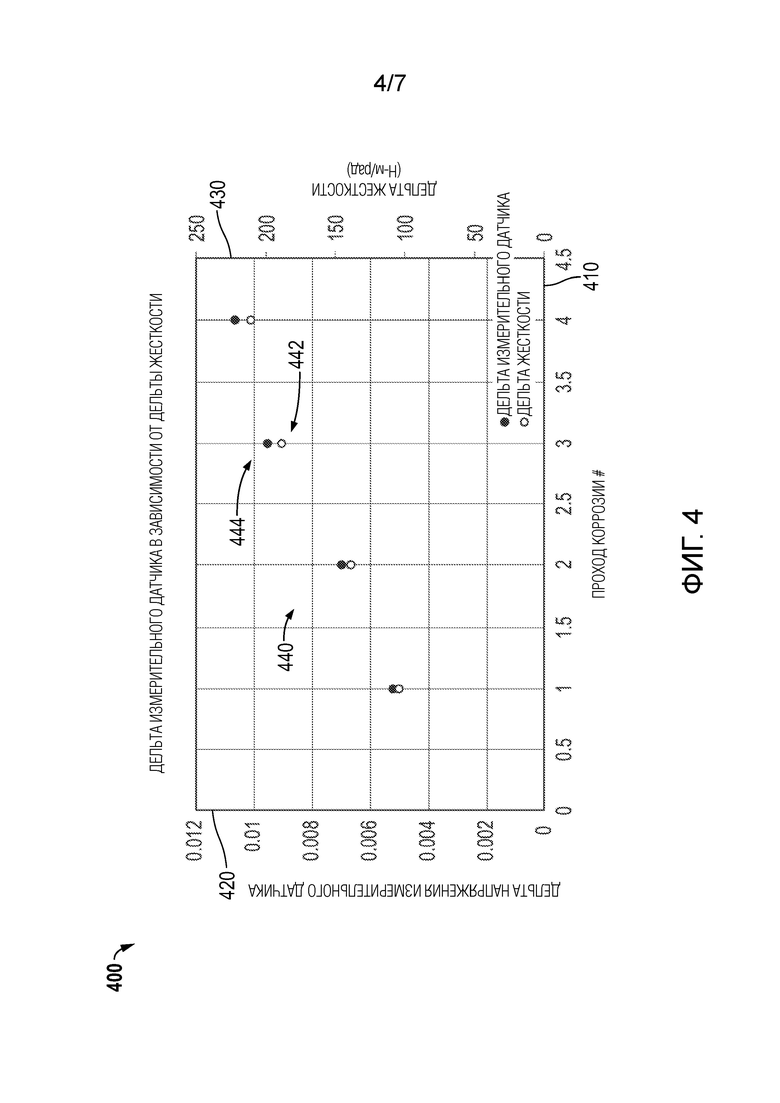
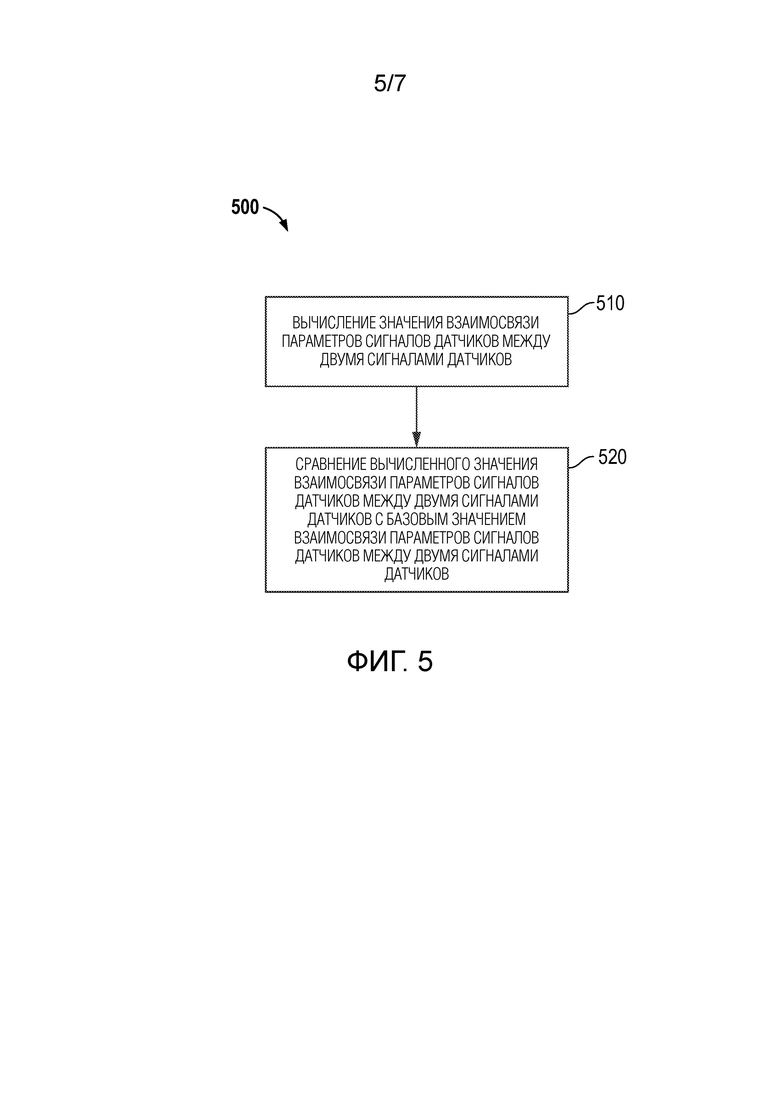
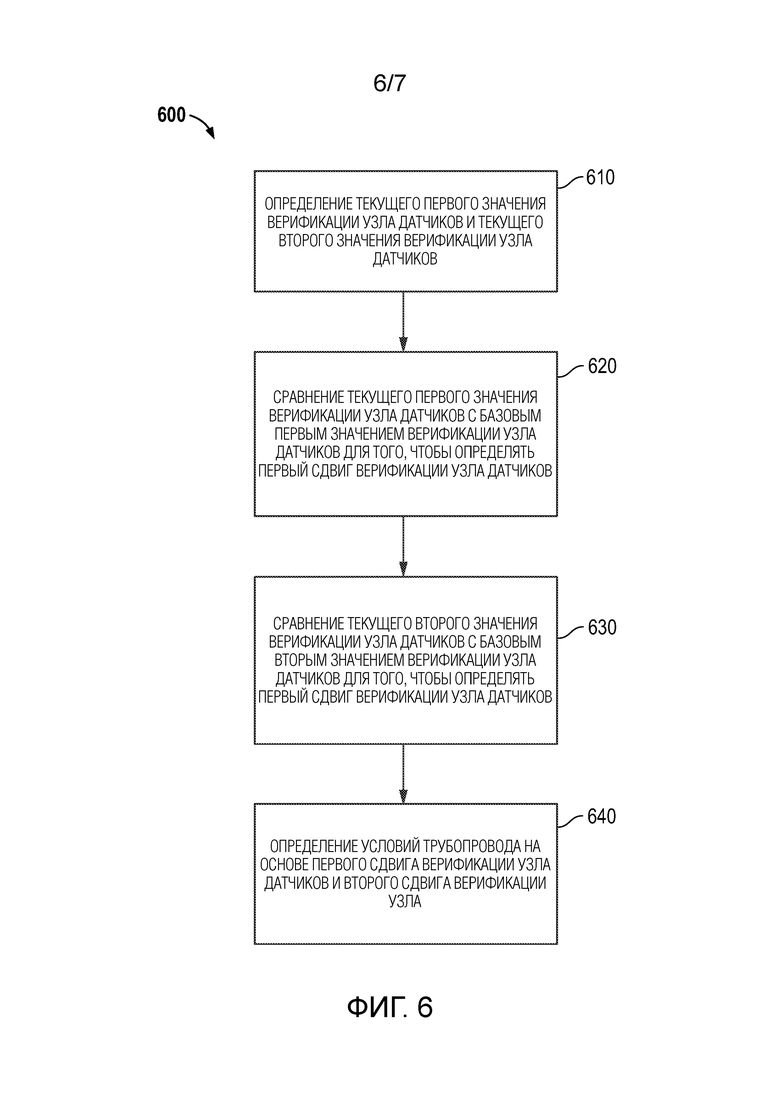
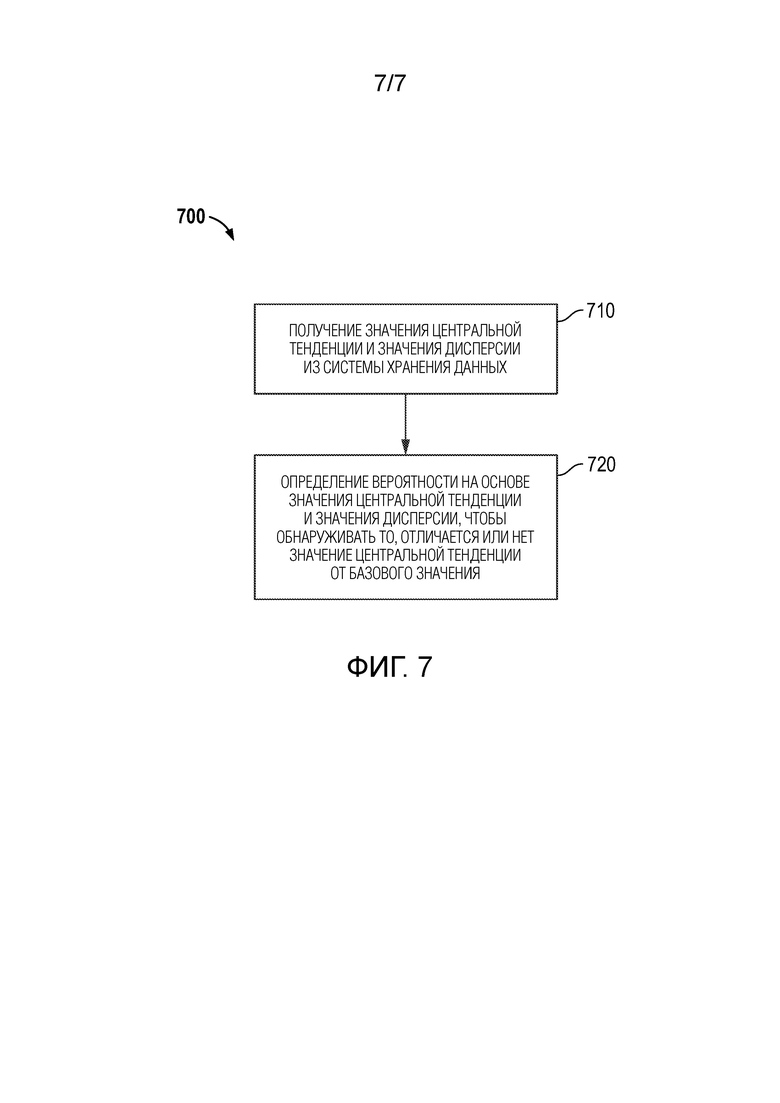
Изобретение относится к верификации узлов датчиков в виброметре, а более конкретно к использованию сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. Электронная схема (20) измерителя для использования параметров сигналов датчиков, предоставленных посредством узла (10) датчиков виброметра (5), для того, чтобы верифицировать то, что узел (10) датчиков предоставляется. Электронные схемы (20) измерителя содержат интерфейс (301), функционально соединенный с узлом (10) датчиков, причем интерфейс (301) выполнен с возможностью принимать два сигнала (100) датчиков, и систему (302) обработки, функционально соединенную с интерфейсом (301). Система (302) обработки выполнена с возможностью вычислять значение взаимосвязи параметров сигналов датчиков между двумя сигналами (100) датчиков и сравнивать вычисленное значение взаимосвязи параметров сигналов датчиков между двумя сигналами (100) датчиков с базовым значением взаимосвязи параметров сигналов датчиков между двумя сигналами (100) датчиков. Технический результат – обеспечение возможности использования параметров сигналов датчиков, предоставленных посредством узла датчиков, для того, чтобы верифицировать узел датчиков. 2 н. и 13 з.п. ф-лы, 4 табл., 7 ил.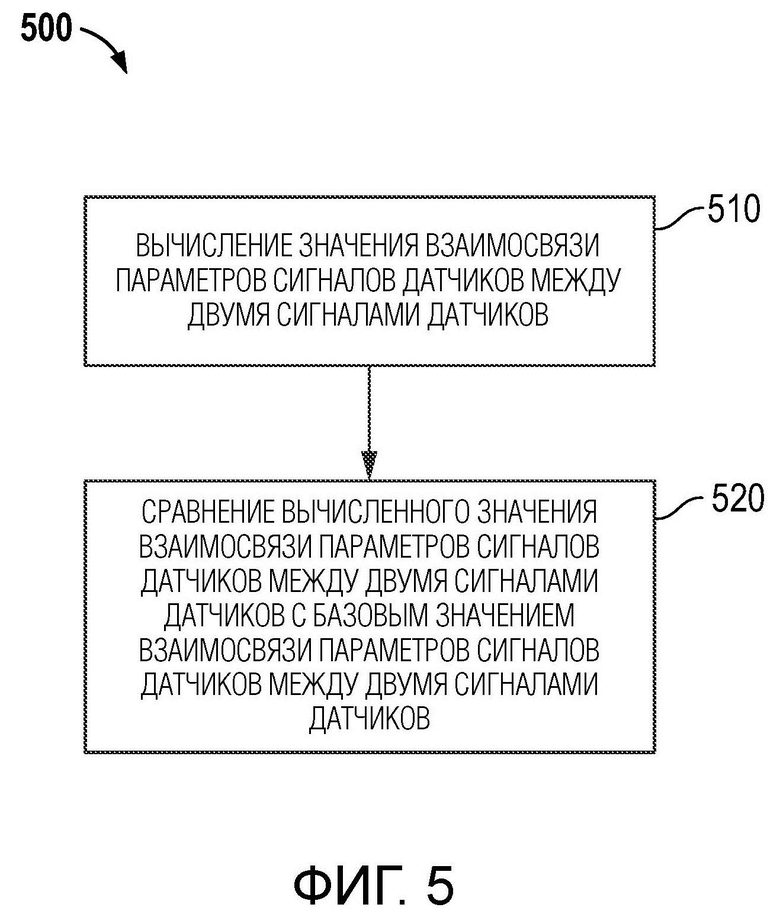
1. Способ использования параметров сигнала датчика, предоставленных посредством узла датчиков виброметра, для того, чтобы верифицировать узел датчиков, при этом способ содержит этапы, на которых:
- получают значение центральной тенденции значения верификации узла датчиков и значение дисперсии значения верификации узла датчиков из устройства хранения данных в электронных схемах измерителя виброметра; и
- определяют вероятность на основе значения центральной тенденции и значения дисперсии, чтобы определять то, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков;
- при этом базовое значение верификации узла датчиков основано на значениях параметров сигналов датчиков и значение верификации узла датчиков представляет собой одно из значения отношения напряжений левого и правого тензодатчиков LPO/RPO-, значения отношения напряжения возбуждающего сигнала, предоставленного в формирователь сигналов управления, к напряжению левого тензодатчика DRV/LPO и значения отношения напряжения возбуждающего сигнала, предоставленного в формирователь сигналов управления, к напряжению правого тензодатчика DRV/RPO.
2. Способ по п. 1, в котором определение вероятности на основе значения центральной тенденции и значения дисперсии содержит этап, на котором вычисляют t-значение и вычисляют вероятность с использованием t-значения.
3. Способ по п. 1, в котором определение вероятности на основе значения центральной тенденции и значения дисперсии содержит этап, на котором вычисляют степень свободы на основе числа измерений для верификации узла датчиков.
4. Способ по п. 1, в котором определение вероятности на основе значения центральной тенденции и значения дисперсии содержит этап, на котором вычисляют среднеквадратическую ошибку на основе среднеквадратического отклонения и степеней свободы, причем среднеквадратическая ошибка вычисляется с использованием следующего уравнения:
 ,
,
где:
stddevpooled является среднеквадратическим отклонением; и
nDOF является степенями свободы.
5. Способ по одному из любых вышеприведенных пп. 1-4, в котором значение дисперсии является объединенным в пул среднеквадратическим отклонением, содержащим среднеквадратическое отклонение измерений для верификации узла датчиков и базовых измерений для верификации узла датчиков.
6. Способ по одному из любых вышеприведенных пп. 1-5, в котором вероятность содержит доверительный интервал значения центральной тенденции, которое сравнивается с нулем, при этом:
если доверительный интервал не включает в себя нуль, то выполняется обнаружение того, что значение центральной тенденции не равно базовому значению верификации узла датчиков; и
если доверительный интервал включает в себя нуль, то выполняется обнаружение того, что значение центральной тенденции равно базовому значению верификации узла датчиков.
7. Способ по п. 1, в котором значение центральной тенденции является значением верификации узла датчиков, и доверительный интервал значения верификации узла датчиков вычисляется с использованием следующего уравнения:
 ,
,
где:
CI является доверительным интервалом значения верификации узла датчиков;
SVmean является значением верификации узла датчиков, полученным из системы хранения данных; и
CIrange является диапазоном доверительного интервала, вычисленным на основе среднеквадратического отклонения и t-значения.
8. Способ по п. 7, в котором диапазон доверительного интервала вычисляется с использованием следующего уравнения:
 ,
,
где:
stderrorpooled является объединенной в пул среднеквадратической ошибкой измерений для верификации узла датчиков; и
tstudent,99,8 является t-значением, вычисленным на основе уровня значимости и степеней свободы, определенных из числа измерений для верификации узла датчиков, содержащих значение верификации узла датчиков.
9. Способ по одному из любых пп. 1-8, дополнительно содержащий этап, на котором задают мертвую зону смещения, при этом если значение центральной тенденции меньше мертвой зоны смещения, то значение верификации узла датчиков не обнаруживается как отличающееся от базового значения верификации узла датчиков.
10. Способ по п. 1, в котором базовое значение верификации узла датчиков содержит значение центральной тенденции и значение дисперсии базового значения верификации узла датчиков.
11. Способ по п. 10, в котором значение центральной тенденции базового значения верификации узла датчиков является средним значением относительно базового значения верификации узла датчиков, и значение дисперсии базового значения верификации узла датчиков является среднеквадратическим отклонением базового значения верификации узла датчиков.
12. Способ по п. 1, в котором обнаружение того, отличается или нет значение центральной тенденции от базового значения верификации узла датчиков, содержит этап, на котором определяют то, не перекрывается либо перекрывается вероятность на основе значения центральной тенденции и значения дисперсии с вероятностью базового значения верификации узла датчиков.
13. Способ по п. 12, в котором вероятность на основе значения центральной тенденции и значения дисперсии содержит доверительный интервал, определенный на основе значения центральной тенденции и значения дисперсии, и вероятность базового значения верификации узла датчиков содержит доверительный интервал, определенный на основе базовых измерений для верификации узла датчиков.
14. Способ по п. 13, в котором определение того, не перекрывается либо перекрывается вероятность на основе значения центральной тенденции и значения дисперсии с вероятностью базового значения верификации узла датчиков, содержит этап, на котором вычисляют следующие уравнения:
 ;
;
 ; и
; и
определение того, что вероятность значения центральной тенденции и значения дисперсии, полученных из устройства хранения данных, перекрывается с вероятностью базового значения верификации узла датчиков, если:
 .
.
15. Электронная схема (20) измерителя для использования параметров сигналов датчиков, предоставленных посредством узла (10) датчиков виброметра (5), для того, чтобы верифицировать узел (10) датчиков, причем электронная схема (20) измерителя содержит:
- систему (302) обработки, включающую в себя систему (304) хранения данных, выполненную с возможностью сохранять значение центральной тенденции значения верификации узла датчиков и значение дисперсии значения верификации узла датчиков, причем упомянутая система (302) обработки выполнена с возможностью выполнения способа по любому одному из предшествующих пп. 1-14.
| WO 2015112296 A1, 30.07.2015 | |||
| WO 2020036586 A1, 20.02.2020 | |||
| WO 2019045703 A1, 07.03.2017 | |||
| US 2014137626 A1, 22.05.2014. |

