Настоящее изобретение касается строительной промышленности и особенно укладки полов даже, и прежде всего, большой протяженности.
Как известно, укладка плиток и, главным образом, полов требует специализированного труда и является очень трудоемкой, вызывая увеличение стоимости. Следовательно, желательно найти систему, дающую возможность укладывать полы за короткое время без необходимости в квалифицированных рабочих.
Основной задачей настоящего изобретения является преодоление вышеупомянутых проблем посредством обеспечения устройства для укладки полов любого типа, такого как из кафеля, майолики, кирпича, бетонной плитки и т.д., очень квалифицированно без необходимости в квалифицированном укладчике кафеля и с большой производительностью в показателях покрытой площади за единицу времени.
Это было достигнуто согласно изобретению посредством обеспечения автоматического устройства, имеющего мостовой кран, снабженный средствами для захватывания, выравнивания и перемещения одной или нескольких плиток в одно и то же время и выполненный с возможностью перемещения вдоль плоскости, параллельной полу, на паре рельсов или направляющих, главным образом, копланарных друг с другом и расположенных вдоль двух направлений, перпендикулярных друг другу.
Ниже изобретение поясняется путем его подробного описания со ссылками на прилагаемые чертежи, на которых изображен в виде неограничительного примера предпочтительный вариант осуществления изобретения.
На чертежах изображено:
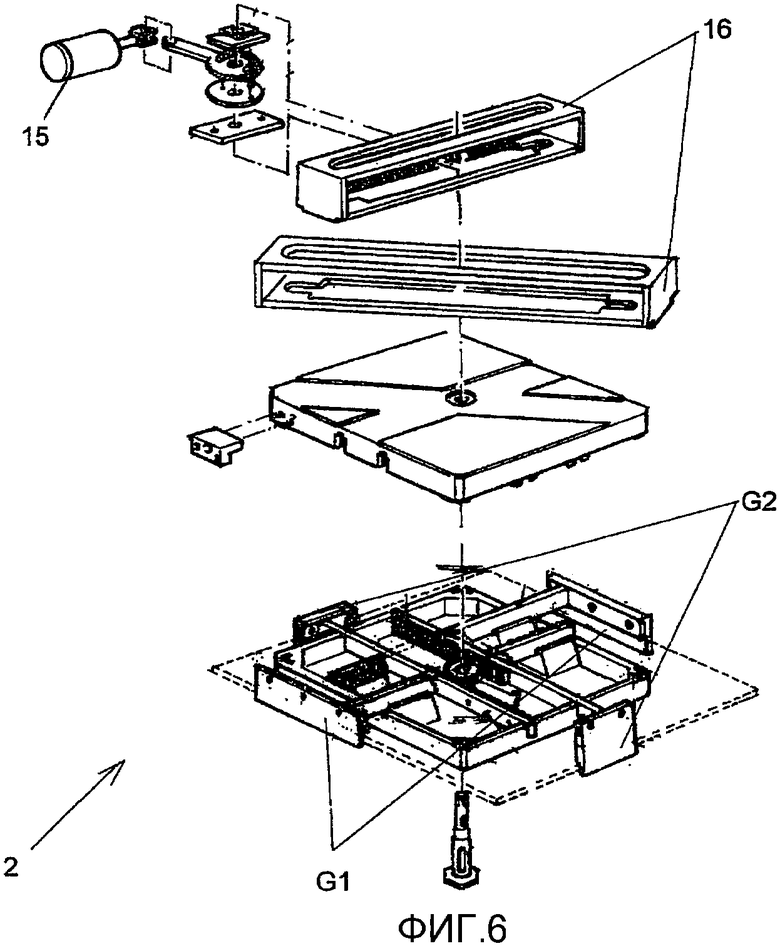
фиг.1 - трехмерный вид, показывающий как устройство согласно изобретению перемещается при укладке плиток;
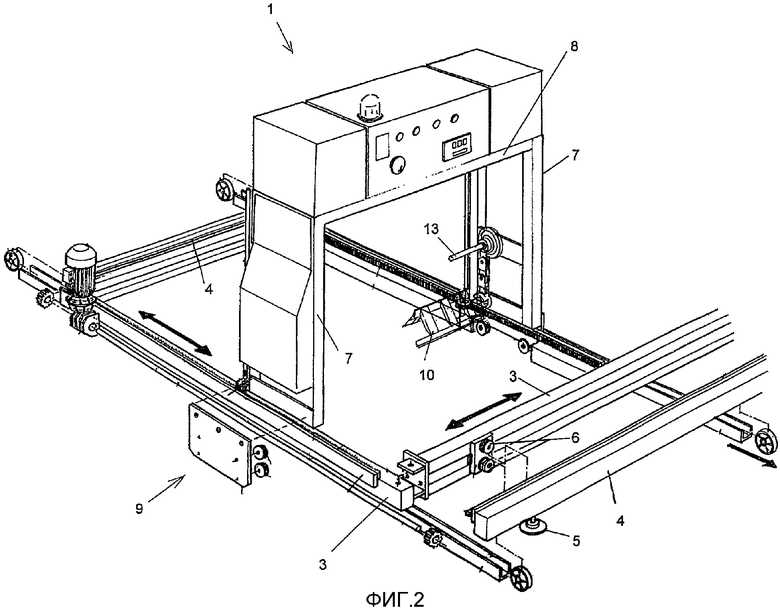
фиг.2 - трехмерный вид, показывающий основные участки устройства укладки плиток;
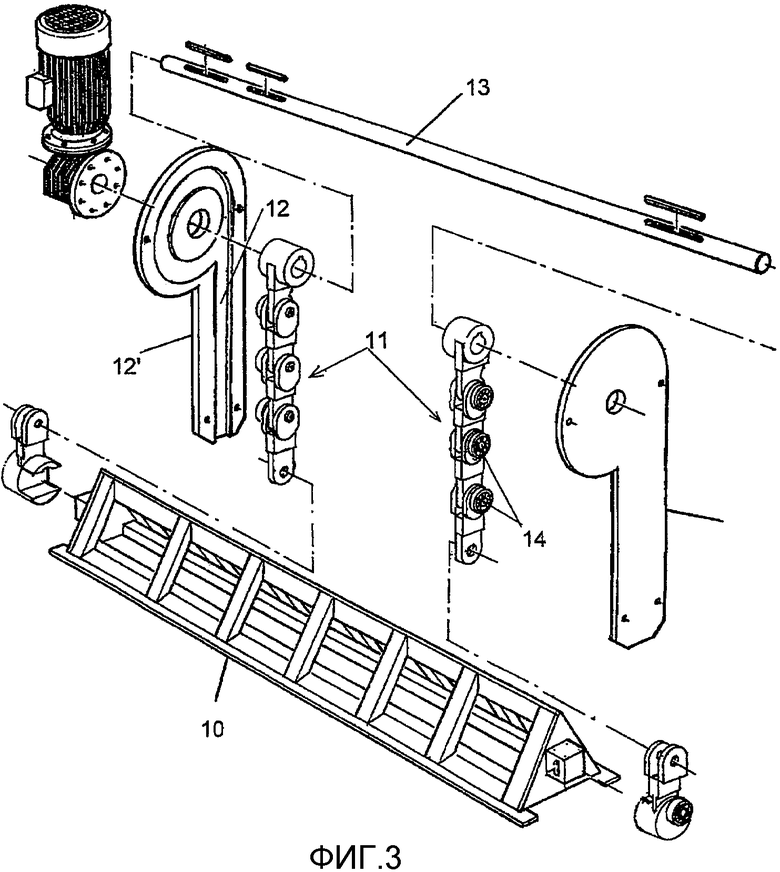
фиг.3 - вид с пространственным разделением деталей, показывающий основные участки системы для перемещения захвата, несущего плитки;
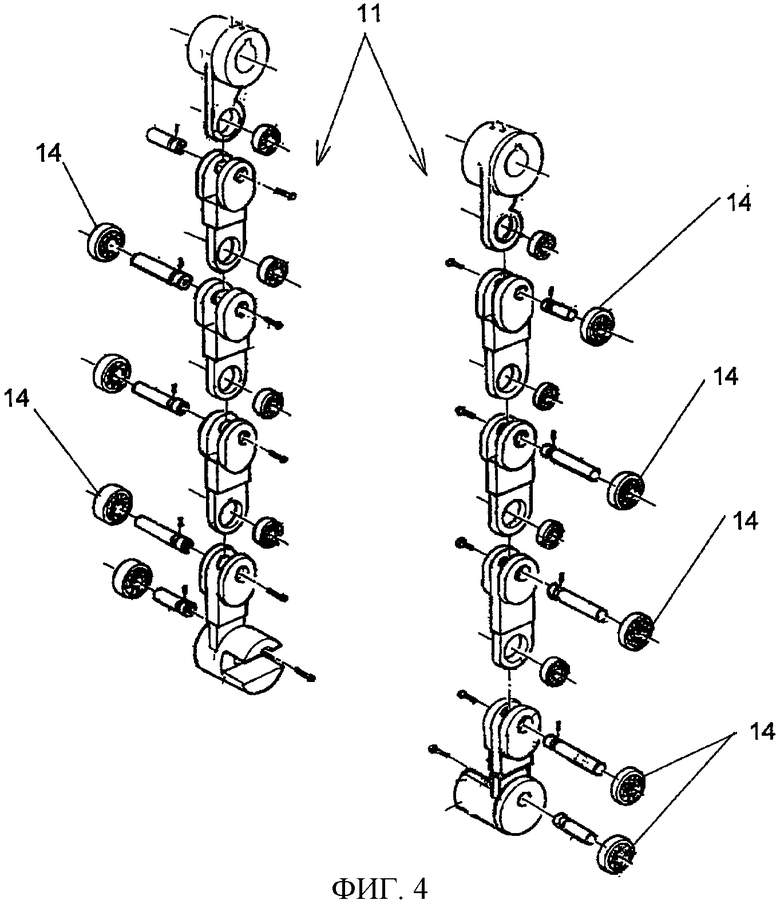
фиг.4 - вид с пространственным разделением деталей конечных цепей системы перемещения захвата, несущего плитки;
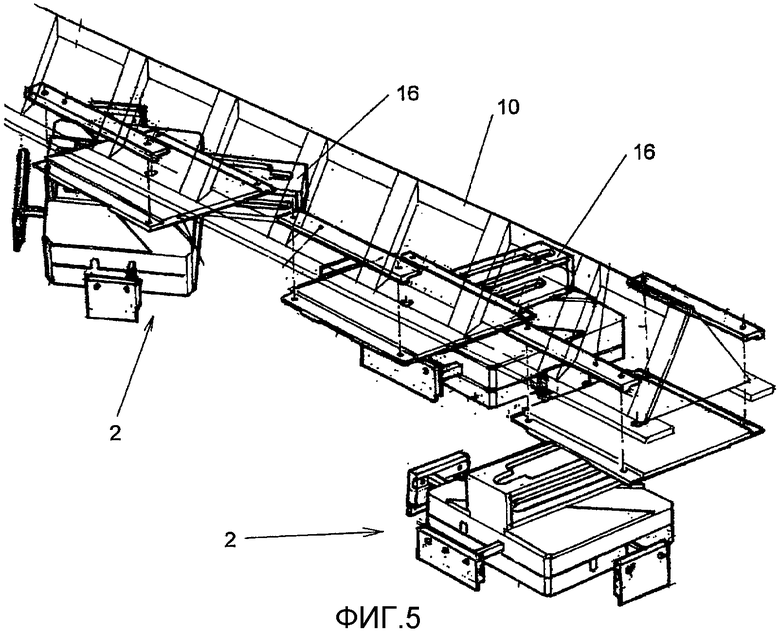
фиг.5 - трехмерный вид, показывающий возможное расположение захвата для укладки плиток прямо или по диагонали;
фиг.6 - вид с пространственным разделением деталей захвата, несущего плитки.
На чертежах изображено устройство, которое согласно изобретению содержит в основном мостовой кран 1, средства 2 для захватывания, перемещения, укладки плитки, первый путь, или пару параллельных рельсов или направляющих, 3, по которым такой мостовой кран 1 перемещается по рядам укладки плиток один за другим, и второй путь или пару параллельных рельсов или направляющих 4 перпендикулярных первым, по которым первый путь и заодно с ним мостовой кран перемещаются.
В описываемом варианте осуществления, ссылка на который сделана ниже, устройство снабжено средствами 2 захватывания-перемещения-позиционирования, включающими четыре захвата, несущих плитки. Конечно, согласно изобретению устройства могут быть снабжены одним, двумя, тремя, четырьмя, пятью или более захватами, сохраняя неизменными изобретательский уровень и техническую идею на основе настоящего изобретения.
Другими словами, мостовой кран 1, манипулирующий плитками, которые должны быть уложены, перемещается вдоль первого пути 3, состоящего из прямоугольной рамы, которая в свою очередь перемещается вдоль второго пути 4 в направлении, перпендикулярном направлению движения мостового крана 1.
Согласно изобретению два пути 3 и 4, по которым перемещается мостовой кран 1, образуют плоскость, параллельную плоскости укладки плиток: если направление движения мостового крана 1 по первому пути, или раме, 3 указывается как «поперечное», а направление движения последнего относительно второго пути 4 указывается как «продольное», то когда устройство укладывает четыре поперечных ряда плиток (потому что на изображенном примере обеспечиваются захваты, несущие четыре плитки) между направляющими второго пути 4, тогда мостовой кран 1 перемещается в продольном направлении по второму пути 4, пока не достигается следующая длина основания, которая должна быть покрыта, смежная с только что уложенной длиной основания, и также перемещается поперечно по первому пути или раме 3 до достижения снова начальной позиции укладки плиток. Чтобы сэкономить время, продольное, поперечное движение позиционирования мостового крана 1 снова предпочтительно выполняют одновременно.
Три основных участка, из которых состоит изобретение, будут подробно объяснены ниже, а именно мостовой кран 1 со средствами 2 манипулирования плитками, первый путь, или поперечная рама, 3 и второй продольный путь 4, который временно закреплен или установлен на основании, на котором должно быть уложено покрытие. Мостовой кран 1, поперечная рама 3 и второй путь 4 предпочтительно выполнены из металла.
Мостовой кран, также называемый ниже как укладочный кран из-за его функции укладывания плиток, состоит, по существу, из вертикальной рамы, выполненной как перевернутая «U» с двумя вертикальными боковыми колоннами или плечами 7 и верхней горизонтальной поперечной балкой 8. Основание каждой колонны 7 закреплено на соответствующей скользящей каретке 9, перемещающейся по соответствующему поперечному пути, или направляющим, 3.
Средство 2 захватывания-перемещения-позиционирования плиток включает горизонтальный вал 13, вращающийся вокруг своей продольной оси, который приводит в движение горизонтальный каркас 10 двумя специальными торцевыми цепями 11. Каркас 10, расположенный между двумя боковыми колоннами 7 мостового крана 1 под его верхней поперечной балкой 8, поддерживает один или несколько захватов, или тисков, 2, захватывающих плитки, которые должны быть уложены.
Согласно специфической особенности изобретения звенья такой специальной торцевой цепи 11 могут скользить внутри направляющих пазов 12, формирующих подходящую дорожку для цепей 11, а также каркаса 10, несущего захват.
В частности, перемещение каркаса и захватов, соединенных с ним, является перемещением с вращением: когда захваты 2 находятся в загрузочном положении, т.е. у верхнего конца хода при такой высоте от пола, что установщик не должен наклоняться, каждая плитка кладется на соответствующий захват с его задней стороны, обращенной верх, и когда захваты зажаты и подходящее количество адгезива нанесено на плитки, захваты переворачиваются и снижаются к основанию укладки, пока их задние стороны не обратятся горизонтально последнему.
Затем перемещение захватов является только вертикальным перемещением вниз, так что к плиткам прикладывается достаточное давление, чтобы распределить равномерно адгезив между каждой плиткой и основанием укладки.
Когда достигнут заданный нижний конец хода, захваты освобождают плитки и двигаются в противоположном направлении. После короткого вертикального перемещения захваты начинают также вращаться, чтобы снова достигнуть положения загрузки плиток, что соответствует вращению примерно на 130° относительно основания укладки в показанном варианте осуществления.
На фиг.3 и 4 изображены две параллельные рукоятки, перпендикулярные оси вращения вала 13, которые установлены на вал и несут два верхних конечных звена цепей 11, подвешенных на них. Это означает, что цепи 11 не наматываются прямо вокруг приводного вала, но следуют заданной дорожке на расстоянии от оси вращения вала 13, дорожка которого выполнена соответствующей направляющей. В раскрытом варианте осуществления каждое звено цепей 11 предпочтительно снабжено, по меньшей мере, одним подшипником 14 скольжения (или другим элементом скольжения), который перемещается внутри соответствующих направляющих пазов 12 в течение всего перемещения цепи. Более конкретно, паз 12 формирует дорожку для звеньев, форма который предпочтительно окружность, от которой по касательной к ней ответвляется сегмент. Дорожки, формируемые направляющими 12 для двух торцевых цепей 11, зеркальны друг другу. Конечно, длина цепей 11 такова, чтобы нижние конечные звенья заодно с каркасом 10, несущим захват, покрывали длину окружности у верхнего конца хода и достигали нижнего конца прямолинейной вертикальной длины соответствующих направляющих пазов у нижнего конца хода. В этой связи нужно принять во внимание, что в иллюстрированном варианте осуществления нижние конечные звенья цепей 11 снабжены двумя подшипниками 14 скольжения, которые скользят относительно направляющих 12 для осуществления вращения каркаса 10 у верхнего положения его перемещения с вращением, таким образом заставляя конечные звенья (и затем каркас вместе с ними) следовать изгибу направляющих.
Перед укладыванием следующего ряда плиток устройство перемещается автоматически на один заданный шаг, который имеет ту же длину, что и выбранные плитки, плюс «зазор» между смежными плитками. Такое перемещение выполняется относительно первого пути 3.
После того как уложены все ряды плиток, соответствующие длине первого пути, или рамы, 3, последний перемещается в сторону вместе с укладочным краном 1 в продольном направлении по второму пути 4, пока не будет достигнуто положение укладки следующих рядов плиток. Для этого укладочный кран 1 выравнивается с первым выложенным рядом, а укладочные шаги повторяются таким же образом, как и предыдущие. Для снижения времени простоя перемещение повторного выравнивания укладочного крана относительно первого уложенного ряда, т.е. его заднее перемещение относительно первого пути, или рамы, 3 до начального положения, предпочтительно выполняется одновременно с перемещением или боковым смещением такой рамы 3 относительно второго продольного пути 4.
Прежде чем подробно описать средства захвата/освобождения плиток, таких как захваты 2, и средства приведения в действие захватов для перемещения от верхнего загрузочного положения до нижнего укладочного положения и наоборот, следует заметить, что укладочный кран 1 перемещается по раме 3 предпочтительно с помощью средства реечной передачи, установленного между, по меньшей мере, одной кареткой 9 у основания боковой колонны 7 и соответствующей направляющей секцией, которая является частью первого пути, или рамы, 3.
Более конкретно, шестерня выполнена за одно целое с кареткой и зацепляется с рейкой, прикрепленной к пути 3, по которому катится каретка 9. Такая шестерня вращается подходящим двигателем известного типа.
Поскольку описывается перемещение всего узла рамы/укладочного крана, здесь также обеспечиваются средства перемещения типа реечной передачи, причем такая рейка закрепляется внутри, по меньшей мере, одного из двух рельсов второго продольного пути 4, и шестерня, сцепленная с ней и вращаемая дополнительным двигателем, прикрепленным к раме 3, расположена на одном конце рамы 3, которая скользит по такому продольному пути 4.
Предпочтительно, чтобы обе каретки 9 укладочного крана 1 снабжались реечными средствами перемещения и оба конца поперечной рамы 3 снабжались соответствующими реечными средствами перемещения для обеспечения большой точности перемещения укладочного крана относительно пола, который должен быть уложен, и затем, по существу, завершить укладку плиток. Совершенная синхронность движений гарантируется присутствием вала, расположенного вдоль одной стороны рамы 3, который соединяет и перемещает две шестерни по второму пути 4.
Поскольку речь идет о приводном средстве захватов, несущих плитки, которое управляет открыванием/закрыванием последних, зацепляющих укладываемые плитки, раскрытый вариант осуществления предусматривает две перпендикулярные пары G1 и G2 кулачков, расположенные напротив друг друга и способные зажимать плитки по всем их четырем сторонам механической приводной системой, управляемой масляно-динамическим приводом 15.
Более конкретно, каждый кулачок выполнен за одно целое с соответствующей рейкой, и четыре рейки зацепляются с одной центральной шестерней, которая заставляет кулачки закрывать/открывать совершенно синхронизированным способом.
Вращение центральной шестерни управляется масляно-динамическим приводом 15, который блокирует кулачки в конце хода или в закрытом (зажатие плиток) положении, или открытом (освобождение плиток) положении. Для этого устройство, раскрытое здесь, обеспечивает гидравлическую систему известного типа, снабженную подходящим насосом и резервуаром (не показано).
Согласно изобретению амплитуда хода перемещения пары кулачков G1 и G2 ограничена для обеспечения максимальной точности открывания/закрывания захватов для различных размеров плиток, так что необходимо регулировать положение конца хода кулачков согласно эффективному размеру плиток. Так как две пары G1 и G2 кулачков зацепляются с одной центральной шестерней, такая регулировка конца хода является самоцентрированием, потому что перемещение кулачка заставляет противоположный кулачок перемещаться на то же расстояние из-за присутствия только одной шестерни.
Предпочтительно можно регулировать другим способом конец хода пары кулачков относительно другой посредством изменения длины соответствующих реек (например, добавлением подходящих удлинений), чтобы уложить также прямоугольные плитки без необходимости какой-либо модификации устройства.
Наконец, захваты 2 могут быть повернуты вокруг их укладочной плоскости, чтобы позволить уложить плитки по диагонали. В этом случае захваты также перемещаются парами посредством отделения их друг от друга и сохранения боковых расстояний неизменными для точного расположения плиток. Для этого каждый захват 2 закрепляется на каркасе 10 посредством направляющих 16 скольжения, которые могут быть расположены поперечно или под углом к оси каркаса.
Такой каркас 10 имеет предпочтительно треугольное поперечное сечение и включает три продольных элемента, расположенных как треугольник и укрепленных множеством поперечных ребер, размещенных по всей длине каркаса. Захваты 2, несущие плитки, размещены на одной из трех боковых граней каркаса 10, т.е. грани, которая параллельна основанию укладки на нижнем конце хода.
Направляющие пазы 12 цепи 11 предпочтительно выполнены в подходящих жестких боковых пластинах 12', соединенных с боковыми колоннами 7 укладочного крана 1.
Согласно настоящему изобретению секции рельсов второго пути 4 снабжены башмаками 5, демпфирующими вибрацию, которые могут быть отрегулированы по высоте, чтобы дать возможность выверять по вертикали пути. Выверка по вертикали предпочтительно выполняется высокоточным лазерным указателем известного типа.
Следует отметить, что полы могут также быть уложены на неровном основании укладки посредством использования подходящего количества адгезива, потому что раскрытое устройство в настоящее время способно укладывать плитки на заданную плоскость независимо от того, что последняя параллельна нижележащему основанию, при условии, если достаточное количество адгезива, распределенное под плитками, заполняет пространство между ними и основанием укладки.
Предпочтительно устройство согласно настоящему изобретению может укладывать плитки с особенно высокой почасовой производительностью, достигающей степени ежедневной укладки примерно 300 м2.
Дополнительным преимуществом изобретения является то, что постоянный рабочий будет только размещать плитки на захватах и распределять на них достаточное количество адгезива, чтобы наполнить пространство между основанием укладки и плитками, вводя только параметры высоты и зазора посредством клавиатуры и дисплея.
Еще одно преимущество изобретения состоит в том, что меньше плиток будут сломаны по сравнению с ручным укладыванием из-за ударов даже легкого молотка, нанесенных рабочим по каждой плитке для распределения адгезива. Даже если такие удары не сильные, тем не менее, они ограничиваются маленькой областью плиток, которые хрупкие сами по себе. По контрасту раскрытое устройство в настоящее время укладывает плитки с применением постоянного и равномерного давления по всей поверхности плиток.
В описанном варианте осуществления движения приводы и двигатели управляются одним или несколькими персональными компьютерами известного типа, которые обычно используются специалистами в данной области техники.
Очевидно, что в качестве альтернативы гидравлических приводов также могут быть использованы пневматические системы или механические и/или электрические средства с тем же оперативным управлением, известным специалистам в данной области техники.
В упрощенном варианте изобретения перемещение первого пути или рамы 3 по второму продольному пути 4 управляется не двигателем, а вручную рабочим.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ-ПЛИТКОУКЛАДЧИК ЧЕРЕПАНОВЫХ | 2008 |
|
RU2374408C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОХОДНЫЙ ДОРОЖНЫЙ АГРЕГАТ, ДОРОЖНАЯ ПЛИТА И СКОРОСТНОЙ СПОСОБ СТРОИТЕЛЬСТВА ДОРОГИ | 2011 |
|
RU2485241C1 |
| УСТРОЙСТВО для УПАКОВКИ СИГАРЕТ В ПАЧКИ | 1969 |
|
SU256675A1 |
| Машина для укладки плитки | 1977 |
|
SU785411A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, МНОГОСЛОЙНАЯ ПАНЕЛЬ, РАСКЛАДНАЯ ОПАЛУБКА ДЛЯ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПО ИЗГОТОВЛЕНИЮ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНО-КАРКАСНОГО ЗДАНИЯ ИЗ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ С ДЕКОРАТИВНОЙ НАРУЖНОЙ ОТДЕЛКОЙ | 2012 |
|
RU2515491C1 |
| Устройство для разрезания плиток | 1978 |
|
SU937160A1 |
| ШТАБЕЛЕФОРМИРУЮЩАЯ МАШИНА | 1969 |
|
SU240613A1 |
| СИСТЕМА УКЛАДКИ НАПОЛЬНЫХ ПЛИТОК | 2002 |
|
RU2305164C2 |
| Устройство для укладки плиток | 1979 |
|
SU881256A1 |
| Укладчик плиток | 1978 |
|
SU800277A1 |
Изобретение относится к области строительства. Автоматическое устройство для укладки полов из плиток, или прессованного кирпича, или майолики содержит мостовой кран, снабженный средствами для захватывания, выравнивания и перемещения одной или нескольких плиток одновременно и выполненный с возможностью перемещения вдоль плоскости, параллельной полу, на паре рельсов или направляющих, по существу, компланарных друг с другом и расположенных вдоль двух направлений, перпендикулярных друг другу. Кроме того, устройство содержит средство захватывания-перемещения-позиционирования плиток, содержащее горизонтальный вал, вращающийся вокруг своей продольной оси. Причем на валу установлены две параллельные рукоятки, перпендикулярные его оси вращения. Технический результат заключается в повышении производительности устройства. 31 з.п. ф-лы, 6 ил.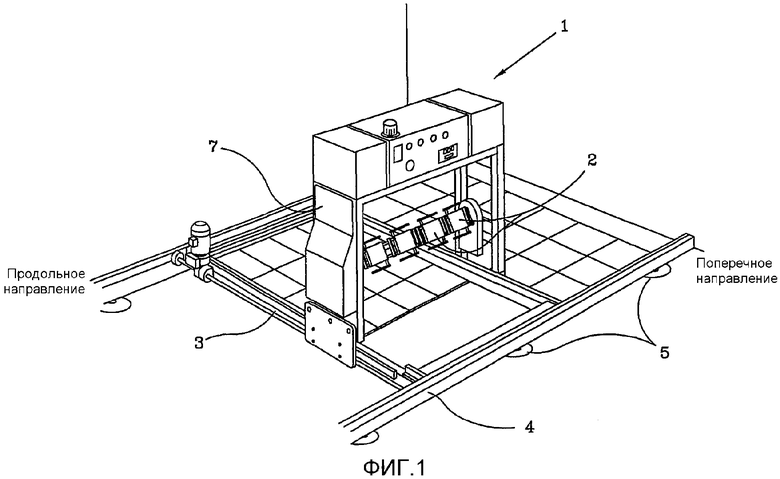
1. Автоматическое устройство для укладки полов из плиток, прессованного кирпича или майолики, содержащее мостовой кран (1), снабженный средствами для захватывания, выравнивания и перемещения одной или нескольких плиток одновременно и выполненный с возможностью перемещения вдоль плоскости, параллельной полу, на паре рельсов или направляющих (3, 4), по существу, компланарных друг с другом и расположенных вдоль двух направлений, перпендикулярных друг другу, а также содержащее средство (2) захватывания-перемещения-позиционирования плиток, содержащее горизонтальный вал (13), вращающийся вокруг своей продольной оси, причем на валу (13) установлены две параллельные рукоятки, перпендикулярные его оси вращения.
2. Устройство по п.1, отличающееся тем, что пара рельсов включает первый путь или пару параллельных рельсов или направляющих (3), по которым мостовой кран (1) перемещается по рядам укладки плиток один за другим, и второй путь или пару параллельных направляющих (4), перпендикулярных первым, по которым первый путь и заодно с ним мостовой кран перемещаются вручную или автоматически.
3. Устройство по п.2, отличающееся тем, что мостовой кран (1), манипулирующий укладываемыми плитками, выполнен с возможностью перемещения вдоль первого пути (3), состоящего из прямоугольной рамы, которая в свою очередь выполнена с возможностью перемещения вдоль второго пути (4) в направлении, перпендикулярном направлению движения мостового крана (1).
4. Устройство по п.2, отличающееся тем, что два пути (3 и 4), по которым перемещается мостовой кран (1), формируют плоскость, параллельную плоскости укладки плиток, по которой мостовой кран (1) перемещается в «поперечном» направлении по первому пути или раме (3), которая в свою очередь перемещается в «продольном» направлении по второму пути (4), причем поперечное и продольное перемещения независимы друг от друга.
5. Устройство по п.2, отличающееся тем, что мостовой кран или мостовой кран (1) состоит, по существу, из вертикальной рамы, выполненной как перевернутая «U» с двумя вертикальными боковыми колоннами или плечами (7) и верхней горизонтальной поперечной балкой (8), причем основание каждой колонны (7) закреплено на соответствующей скользящей каретке (9), выполненной с возможностью перемещения по соответствующему пути или направляющим первого пути или рамы (3).
6. Устройство по п.1, отличающееся тем, что горизонтальный вал (13) приводит в движение горизонтальный каркас (10) двумя специальными торцевыми цепями (11), причем каркас (10) поддерживает один или несколько захватов или тисков (2), захватывающих плитки, которые должны быть уложены.
7. Устройство по п.6, отличающееся тем, что каркас (10) расположен между двумя боковыми колоннами (7) мостового крана (1) под его верхней поперечной балкой (8).
8. Устройство по п.6 или 7, отличающееся тем, что звенья специальной торцевой цепи (11) выполнены с возможностью скольжения внутри направляющих пазов (12), формирующих подходящую дорожку для цепей (11), а также каркаса (10), несущего захваты (2).
9. Устройство по п.8, отличающееся тем, что перемещение каркаса (10) и захватов (2), соединенных с ним, является перемещением с вращением так, что когда захваты (2) находятся в загрузочном положении у верхнего конца хода, где каждая плитка кладется на соответствующий захват с его задней стороны, обращенной вверх, и когда захваты зажаты, и подходящее количество адгезива нанесено на плитки, захваты переворачиваются и снижаются к основанию укладки, пока их задние стороны не обратятся горизонтально последнему, причем движение захватов (2) теперь является только вертикальным перемещением вниз, так что к плиткам прикладывается достаточное давление для равномерного распределения адгезива между каждой плиткой и основанием укладки.
10. Устройство по п.9, отличающееся тем, что когда достигнут заданный нижний конец хода, захваты (2) высвобождают плитки и перемещаются в противоположном направлении так, что после короткого вертикального перемещения захваты начинают также вращаться, чтобы снова достигнуть положения загрузки плиток.
11. Устройство по п.10, отличающееся тем, что положение загрузки плиток соответствует вращению примерно на 130° относительно основания укладки.
12. Устройство по п.6, отличающееся тем, что две параллельные рукоятки, перпендикулярные оси вращения вала (13), несут два верхних конечных звена цепей (11), подвешенных на них, таким образом обеспечивается то, что цепи (11) не наматываются прямо вокруг приводного вала (13), но следуют заданной дорожке на расстоянии от оси вращения вала (13), дорожка цепей которого выполнена соответствующей направляющей.
13. Устройство по п.12, отличающееся тем, что каждое звено цепей (11) снабжено, по меньшей мере, одним подшипником (14) скольжения или другим элементом скольжения, перемещающимся внутри соответствующих направляющих пазов (12) в течение всего перемещения цепи.
14. Устройство по п.13, отличающееся тем, что паз (12) формирует дорожку для звеньев, форма которой предпочтительно окружность, от которой по касательной к ней ответвляется сегмент, причем дорожки, формируемые направляющими (12) для двух торцевых цепей (11), зеркальны друг другу.
15. Устройство по п.14, отличающееся тем, что длина цепей (11) такова, чтобы нижние конечные звенья заодно с каркасом (10), несущим захват, покрывали длину окружности у верхнего конца хода и достигали нижнего конца прямолинейной вертикальной длины соответствующих направляющих пазов у нижнего конца хода.
16. Устройство по п.15, отличающееся тем, что нижние конечные звенья цепей (11) снабжены двумя подшипниками (14) скольжения, которые скользят относительно направляющих (12) для вращения каркаса (10) у верхнего положения его перемещения с вращением, таким образом заставляя конечные звенья и затем каркас вместе с ними следовать изгибу направляющих.
17. Устройство по п.2, отличающееся тем, что после того как средство манипулирования плитками устанавливается на основание укладки, устройство перемещается автоматически на один заданный шаг, который имеет ту же длину, что и выбранные плитки, плюс «зазор» между смежными плитками, причем упомянутое перемещение выполнено относительно первого пути (3) перед тем как будет уложен следующий ряд плиток.
18. Устройство по п.17, отличающееся тем, что после того, как уложены все ряды плиток, соответствующие длине первого пути или рамы (3), последний перемещается в сторону вместе с мостовым (1) или укладочным краном в продольном направлении по второму пути (4), пока не будет достигнуто положение укладки следующих рядов плиток, так что мостовой кран (1) выравнивается с первым выложенным рядом, а укладочные шаги повторяются таким же образом, как и предыдущие.
19. Устройство по п.5, отличающееся тем, что мостовой кран (1) выполнен с возможностью перемещения по раме (3) предпочтительно с помощью средства реечной передачи, установленного между, по меньшей мере, одной кареткой (9) у основания боковой колонны (7) и соответствующей направляющей секцией, которая является частью первого пути или рамы (3).
20. Устройство по п.19, отличающееся тем, что шестерня выполнена за одно целое с кареткой (9) и зацепляется с рейкой, прикрепленной к пути (3), по которому катится каретка (9), причем упомянутая шестерня вращается подходящим двигателем известного типа.
21. Устройство по п.5, отличающееся тем, что перемещение всего узла рамы (3)/мостового крана (1) управляется средством перемещения типа реечной передачи, причем упомянутая рейка закреплена внутри, по меньшей мере, одного из двух рельсов второго продольного пути (4), и шестерня, сцепленная с ней и вращаемая дополнительным двигателем, прикрепленным к раме (3), расположена на одном конце рамы (3), скользящей по продольному пути (4).
22. Устройство по п.21, отличающееся тем, что обе каретки (9) мостового крана (1) снабжены реечными средствами перемещения, и оба конца поперечной рамы (3) снабжены соответствующими реечными средствами перемещения для обеспечения большой точности перемещения мостового крана относительно укладываемого пола, и затем, по существу, завершения укладки плиток, причем совершенная синхронность движений гарантируется присутствием вала, расположенного вдоль одной стороны рамы (3), который соединяет и перемещает две шестерни по второму пути (4).
23. Устройство по п.2, отличающееся тем, что приводное средство захватов, несущих плитки, которое управляет открыванием/закрыванием последних, зацепляющих укладываемые плитки, обеспечивает две перпендикулярные пары (G1 и G2) кулачков, расположенных напротив друг друга и зажимающих плитки по всем их четырем сторонам механической приводной системой, управляемой масляно-динамическим приводом (15).
24. Устройство по п.23, отличающееся тем, что каждый кулачок выполнен за одно целое с соответствующей рейкой, и четыре рейки зацепляются с одной центральной шестерней, которая заставляет кулачки закрывать/открывать, по существу, синхронизированным способом.
25. Устройство по п.24, отличающееся тем, что вращение центральной шестерни осуществлено масляно-динамическим приводом (15), который блокирует кулачки в конце хода или в закрытом положении при зажатии плиток или открытом положении при высвобождении плиток, причем с ним связана гидравлическая система известного типа, снабженная соответствующим насосом и резервуаром.
26. Устройство по п.23, отличающееся тем, что амплитуда хода перемещения пары кулачков (G1 и G2) ограничена для обеспечения максимальной точности открывания/закрывания захватов для различных размеров плиток, так что необходимо регулировать положение конца хода кулачков согласно эффективному размеру плиток.
27. Устройство по п.23, отличающееся тем, что из-за зацепления двух пар (G1 и G2) кулачков с одной центральной шестерней, указанная регулировка конца хода является самоцентрированием, потому что перемещение кулачка заставляет противоположный кулачок перемещаться на то же расстояние, из-за присутствия только одной шестерни.
28. Устройство по п.23, отличающееся тем, что длина соответствующих реек изменяется, например, добавлением подходящих удлинений, чтобы отрегулировать другим способом конец хода пары кулачков относительно другой для укладки также прямоугольных плиток без необходимости какой-либо модернизации устройства.
29. Устройство по п.6, отличающееся тем, что захваты (2) выполнены с возможностью поворота вокруг их укладочной плоскости для укладки плиток по диагонали, причем захваты также выполнены с возможностью перемещения парами посредством отделения их друг от друга и сохранения боковых расстояний неизменными для точного расположения плиток.
30. Устройство по п.29, отличающееся тем, что каждый захват (2) закреплен на каркасе (10) посредством направляющих (16) скольжения, которые выполнены с возможностью их размещения поперечно или под углом к оси каркаса.
31. Устройство по п.6, отличающееся тем, что каркас (10) имеет предпочтительно треугольное поперечное сечение и включает три продольных элемента, расположенных как треугольник и укрепленных множеством поперечных ребер, размещенных по всей длине каркаса, причем несущие плитки захваты (2) размещены на одной из трех боковых граней каркаса (10), которая параллельна основанию укладки на нижнем конце хода.
32. Устройство по п.8, отличающееся тем, что направляющие пазы (12) цепи (11) предпочтительно выполнены в подходящих жестких боковых пластинах (12'), соединенных с боковыми колоннами (7) мостового крана (1).
| DE 19540224 A1, 24.04.1997 | |||
| УСТРОЙСТВО для УКЛАДКИ КЕРАМИЧЕСКИХ ПЛИТОК | 0 |
|
SU332189A1 |
| US 3678645 A, 25.07.1972 | |||
| АЗОТСОДЕРЖАЩЕЕ ОРГАНИЧЕСКОЕ УДОБРЕНИЕ | 2002 |
|
RU2222515C1 |
| Способ формования штучных изделий из керамической массы и устройство для его осуществления | 1990 |
|
SU1784459A1 |

