Группа изобретений относится к бесплатформенным инерциальным навигационным системам (БИНС) летательных аппаратов (ЛА) и, прежде всего, малоразмерных беспилотных летательных аппаратов (БПЛА), в которых используется основная измерительная информация с блока датчиков угловых скоростей (ДУС), с блока датчиков линейных ускорений (ДЛУ), с трехстепенного магнитного датчика направления, с системы воздушных сигналов (СВС) и дополнительная информация со спутниковой радионавигационной системы (СРНС) и/или системы радиолокационных измерений (СРЛИ).
Аналогом навигационного комплекса является известная комплексная система навигации [1], в которой повышение точности осуществляется за счет использования спутникового датчика координат и датчика полярных координат ориентира, при этом вычисляются и компенсируются погрешности параметров, выдаваемых потребителю. В малоразмерной беспилотной авиации в условиях разведывательных операций потеря внешней информации, например информации со спутникового датчика координат, имеет высокую вероятность. При отсутствии внешней информации коррекция комплексной системы навигации невозможна, и ее точность будет определяться точностью инерциальных датчиков. Для получения приемлемой точности необходимо иметь высокоточные и, следовательно, дорогие инерциальные датчики и достаточно мощную бортовую цифровую вычислительную машину. В случае применения известной комплексной системы навигации в малоразмерной беспилотной авиации выполнение этих требований экономически невыгодно, а для некоторых типов беспилотных летательных аппаратов и технически невыполнимо.
Наиболее близким к заявляемому устройству навигационным комплексом по технической сущности является навигационный комплекс [2], состоящий из аппаратуры потребителя спутниковой навигационной системы, позволяющей определять текущие координаты и компоненты вектора скорости в земной системе координат, датчиков углов крена и тангажа, датчиков углов атаки и скольжения, трехстепенного магнитного датчика направления, датчиков линейных ускорений и угловых скоростей, установленных в связанной системе координат ЛА и бортового вычислителя, выполненного с возможностью совместной обработки сигналов от всех датчиков.
В известном навигационном комплексе повышение точности определения координат, скорости и углов ориентации ЛА осуществляется за счет комплексирования сигналов СРНС и сигналов с датчиков углов крена, тангажа, атаки, скольжения и сигнала об угле рысканья, вычисленного с использованием этих же сигналов и сигналов с трехстепенного магнитного датчика направления. Указанные вычисления с приемлемой точностью возможны при использовании высокоточных датчиков углов крена и тангажа, которые, как отмечено в описании, представляют собой датчики гироскопического типа. Они являются достаточно сложными электромеханическими системами, объединенными в гировертикалях [3, с.339-349]. Применение гировертикалей в большей части малоразмерных БПЛА не рекомендовано или невозможно по массогабаритным и иным показателям. В то же время потеря информации с аппаратуры потребителя спутниковой навигационной системы, которая имеет высокую вероятность в условиях разведывательных операций, полностью выводит навигационный комплекс из рабочего состояния. Отмеченные недостатки определяют невозможность применения известного навигационного комплекса в малоразмерных БПЛА.
Аналогом устройства вычисления скорости и координат является связанная инерциальная навигационная система, приведенная в источнике [3, с.282], содержащая акселерометры, установленные на корпусе ЛА, гироскопы, также установленные на корпусе ЛА, блок вычитания угловой скорости вращения Земли из угловой скорости ЛА, блок пересчета угловой скорости и линейного ускорения из связанной системы координат в нормальную земную с использованием матрицы направляющих косинусов, блок начальной выставки, система вычисления скорости и координат ЛА, блок вычисления вектора скорости ЛА, блок вычисления координат ЛА.
В известной связанной инерциальной навигационной системе вектор скорости и координаты ЛА вычисляются интегрированием трех составляющих инерциального ускорения, преобразованных с помощью матрицы направляющих косинусов, в три составляющих ускорения ЛА в нормальной земной системе координат. При отсутствии внешней информации накапливаются погрешности вычисления вектора скорости и координат ЛА за счет интегрирования погрешностей инерциальных датчиков. Для получения приемлемой точности связанной инерциальной навигационной системы необходимо иметь высокоточные и, следовательно, дорогие инерциальные датчики. Однако, как отмечалось выше, применение таких датчиков экономически невыгодно в малоразмерной беспилотной авиации. Поэтому нецелесообразно применение известной связанной инерциальной навигационной системы в малоразмерной беспилотной авиации.
Наиболее близкими к заявляемому устройству вычисления скорости и координат по технической сущности являются баро-инерциальный высотомер, приведенный в источнике [3, с.281, рис.7.13], содержащий акселерометр, блок введения поправки Кориолиса и ускорения силы тяжести Земли, блок коррекции ускорения, блок вычисления скорости, блок задания начальной скорости, блок коррекции скорости, блок вычисления высоты, блок задания начальной высоты, блок вычисления погрешности по высоте, блок фильтрации погрешности по высоте и оценки погрешности по ускорению, блок фильтрации погрешности по высоте и оценки погрешности по скорости, блоки задания начальной скорости и высоты, блок измерения барометрической высоты, при этом входы блока коррекции ускорения соединены с выходом акселерометра, выходом блока введения поправки Кориолиса и ускорения силы тяжести Земли и выходом блока фильтрации погрешности по координате и оценки погрешности по ускорению, входы блока вычисления скорости соединены с выходом блока коррекции ускорения и с выходом блока задания начальной скорости, входы блока коррекции скорости соединены с выходом блока фильтрации погрешности по высоте и оценки погрешности по скорости и с выходом блока задания начальной высоты, входы блока вычисления высоты соединены с выходом блока коррекции скорости и с выходом блока задания начальной высоты, входы блока вычисления погрешности по высоте соединены с выходом блока вычисления высоты и выходом блока измерения барометрической высоты, выход блока вычисления погрешности по высоте соединен с входом блока фильтрации погрешности по высоте и оценки погрешности по скорости и с входом блока фильтрации погрешности по высоте и оценки погрешности по ускорению. Аналогичным образом может быть построено устройство для вычисления двух других составляющих векторов скорости и координат.
В известном баро-инерциальном высотомере решается задача коррекции нарастающих во времени погрешностей вычисления скорости и высоты ЛА и улучшаются динамические характеристики. Однако в автономном режиме, т.е. при отсутствии внешних измерений, погрешность вычисления вектора скорости и высоты будет определяться погрешностями инерциальных датчиков. Погрешности ДЛУ не должны превышать 2·10-7 g, что указано в источнике [3, с.272]. Погрешности ДЛУ средней точности не менее 2·10-2 g, что не позволяет построить устройство для вычисления всех составляющих векторов скорости и координат ЛА, работающее в том числе и в автономном режиме, для малоразмерного БПЛА на датчиках средней точности.
Аналогом бесплатформенной инерциальной курсовертикали (БИКВ) является БИКВ [4, с.29-35], которая содержит блок лазерных (или другого типа) ДУС, блок ДЛУ, блок начальной выставки, блок интеграторов, вычисляющий матрицу ориентации интегрированием модифицированного уравнения Пуассона, блок вычисления дополнительных угловых скоростей ЛА, обусловленных кривизной траектории облета земного эллипсоида, блок пересчета матрицы ориентации в углы ориентации.
В известной БИКВ алгоритмическими средствами уменьшается влияние методических погрешностей вычисления углов крена, курса и тангажа, обусловленных кривизной траектории облета ЛА земного эллипсоида. Инструментальные погрешности ДУС и ДЛУ должны быть достаточно малыми. Однако наибольшее влияние на точность вычисления углов ориентации оказывают ненулевые сигналы ДУС и ДЛУ при отсутствии угловых скоростей и линейных ускорений, так как в процессе интегрирования происходит накопление ошибок. Например, нулевой сигнал ДУС не должен превышать 1-3 град./ч, тогда уход БИКВ за час составит несколько градусов. При использовании в известном устройстве датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации, ошибки вычисления углов могут достигать сотен градусов.
Наиболее близкой к заявляемой БИКВ по технической сущности является БИКВ [5], которая содержит трехканальный блок ДУС, трехканальный блок линейных акселерометров, формирователь производных от углов ориентации, блок коррекции, блок интеграторов, блок вычисления наблюдаемой вертикали, блок вычисления ошибок курсовертикали, фильтр, блок выставки курса, при этом входы формирователя производных от углов ориентации соединены с выходами трехканального блока ДУС и выходами блока интеграторов, блок коррекции соединен с выходами формирователя производных от углов ориентации и выходами фильтра, а выходы блока коррекции соединены с блоком интеграторов, входы блока вычисления ошибок курсовертикали соединены с выходами блока вычисления наблюдаемой вертикали, с выходами блока выставки курса и с выходами блока интеграторов, а выходы блока вычисления ошибок курсовертикали соединены с фильтром, входы блока вычисления наблюдаемой вертикали соединены с выходами трехканального блока линейных акселерометров, входы блока выставки курса соединены с выходом блока коррекции и с аппаратурой, вычисляющей начальную или накопившуюся ошибку по курсу.
В известной БИКВ снижение погрешности вычисления углов ориентации ЛА осуществляется компенсацией нулей сигналов на входе в блок интеграторов, но при эволюциях ЛА величины компенсирующих сигналов будут изменяться, тогда в переходных режимах компенсация нулевых сигналов из-за инерционности процессов в фильтре будет неточной, что приведет к погрешностям вычисления углов ориентации. Погрешности в переходных режимах могут быть снижены только при полном отсутствии погрешностей нулей ДУС. Дополнительные погрешности вычисления углов ориентации при эволюциях ЛА будут возникать и из-за погрешностей крутизны характеристик ДУС, которые в известной БИКВ не компенсируются. Погрешности вычисления углов ориентации будут иметь место также и из-за неточности вычисления наблюдаемой вертикали и ошибок определения курса, причем погрешности вычисления наблюдаемой вертикали будут определяться погрешностями линейных акселерометров, а погрешность вычисления курса в данном устройстве не определена. Таким образом, повышение точности вычисления углов ориентации возможно только при устранении отмеченных недостатков БИКВ.
Известны способы коррекции измерительных устройств, приведенные в источнике [6, с.54-66, рис.9-15], заключающиеся в формировании корректирующего сигнала методом вспомогательных измерений, методом образцовых сигналов или методом обратного преобразования, являющегося функционалом погрешности измерения, вычислением корректирующего воздействия с помощью корректирующего сигнала, введением корректирующего воздействия на параметры измерительного устройства таким образом, чтобы реальная статическая функция преобразования измерительного устройства приближалась к номинальной, или введением поправок на выход измерительного устройства, вычисляемых дополнительным измерительным преобразователем корректирующего воздействия.
Недостатки известных способов коррекции измерительных устройств следующие:
- невозможность учета всех факторов, влияющих на погрешность измерения, при вычислении корректирующего сигнала методом вспомогательных измерений и, следовательно, невозможность полной компенсации погрешности, а также необходимость установки дополнительных датчиков для оценки влияния каждого фактора;
- необходимость периодического подключения к входу измерительного устройства образцового сигнала при формировании корректирующего сигнала методом образцовых сигналов, что для инерциальных датчиков в навигационных системах с технической точки зрения не представляется возможным;
- необходимость использования точной измеряемой величины и выполнения точного обратного преобразования для измерительного устройства при формировании корректирующего сигнала методом обратного преобразования, что для инерциальных датчиков в навигационных системах с технической точки зрения также не представляется возможным;
- сложность воздействия на характеристику преобразования измерительного устройства, так как инерциальные датчики в навигационных системах являются сертифицированными объектами, с ограниченными возможностями подстройки параметров;
- корректируется суммарная погрешность измерительного устройства или ее часть, что не позволяет существенно повысить точность навигационной системы при использовании известных способов коррекции погрешностей инерциальных датчиков, так как отдельные составляющие погрешности вносят различный вклад в суммарную погрешность навигационной системы при эволюциях ЛА.
Наиболее близким к заявляемому способу коррекции инерциальных датчиков по технической сущности является способ, приведенный в источнике [6, с.74-76], заключающийся в измерении вспомогательными измерительными устройствами корректирующих сигналов как известных функций измеряемой величины и различных влияющих на точность измерения факторов, вычислении номинальной измеряемой величины как функции, обратной функции измерительного преобразователя, с использованием скорректированного измеренного сигнала, вычислении погрешности измерения, приведенной к выходу измерительного устройства, как функции корректирующих сигналов и номинальной измеряемой величины, компенсации погрешности измерения.
Недостатки известного способа коррекции измерительных устройств следующие:
- погрешность измерительного устройства корректируется частично, в соответствии с факторами, измеряемыми вспомогательными измерительными устройствами;
- для измерения каждого фактора, влияющего на точность измерения, необходимо отдельное вспомогательное измерительное устройство;
- необходимо знать зависимость погрешности измерительного устройства от совместного действия всех факторов;
- необходимо иметь вычислительное устройство, которое вычисляло бы номинальную измеряемую величину и с использованием результатов измерений вычисляло бы погрешность измерительного устройства, приводило ее к выходу измерительного устройства и вычитало из результата измерений;
- необходимо согласование частотных характеристик измерительного устройства, вспомогательных измерительных устройств, вычислительного устройства и частотных спектров измеряемого сигнала и влияющих факторов;
- при несоблюдении указанных выше требований точность коррекции будет низкая.
Аналогом устройства коррекции инерциальных датчиков является устройство коррекции инерциальных датчиков в инерциальной навигационной системе [7], в которой производится коррекция инерциальных датчиков компенсацией инструментальных погрешностей, обусловленных температурным дрейфом параметров. Коррекция осуществляется по внешним факторам (по изменению температуры корпуса блока инерциальных датчиков) с использованием модели температурной погрешности, построенной на основании статистических данных, присущей конкретному типу датчиков. При этом другие составляющие погрешности инерциальных датчиков должны быть достаточно малыми, так как они не оцениваются и, следовательно, не компенсируются. В то же время навигационные параметры, выдаваемые потребителю, не контролируются с использованием альтернативных измерений и не корректируются. В случае применения известной инерциальной навигационной системы в малоразмерной беспилотной авиации с дешевыми инерциальными датчиками средней точности предлагаемая коррекция инерциальной навигационной системы не обеспечивает необходимой точности.
Наиболее близким к заявляемому устройству коррекции инерциальных датчиков по технической сущности является измерительное устройство, приведенное в источнике [6, с.74-76, рис.17], содержащее измерительное устройство, n вспомогательных измерительных устройств, вычислительное устройство и блок компенсации погрешности измерения, реализованное в соответствии с приведенным выше способом коррекции датчиков.
Недостатком известного измерительного устройства является сложность реализации всех требований, перечисленных в недостатках способа коррекции датчиков, и существенное снижение точности при частичной реализации перечисленных требований. Построить высокоэффективную систему коррекции возможно лишь в том случае, когда осуществляется компенсация всех основных составляющих погрешности инерциальных датчиков в отдельности, так как их влияние на результат различное на различных режимах полета. К основным составляющим погрешности инерциальных датчиков следует отнести: аддитивные и мультипликативные погрешности, причем отношение составляющих погрешности к измеряемой величине составляет 0,001... 0,0001, а к шуму - 0,01…0,001. Малые погрешности инерциальных датчиков оказывают существенное влияние на погрешности устройства вычисления скорости и координат, БИКВ и навигационный комплекс в целом. Для полной компенсации погрешности измерения необходимо определить погрешность измерения инерциального датчика с высокой точностью, так как в противном случае компенсация будет неполной. Однако известные устройства не позволяют выполнить эту функцию в полной мере.
Общими признаками заявляемого навигационного комплекса и известного навигационного комплекса [2] являются бортовой вычислитель, трехканальный блок ДЛУ, блок измерения координат, блок измерения скорости, трехстепенной магнитный датчик направления, трехканальный блок ДУС.
Общими признаками заявляемого устройства вычисления скорости и координат и известного баро-инерциального высотомера [3, с.281, рис.7.13] являются блок введения поправок Кориолиса и ускорения силы тяжести Земли, блок коррекции ускорения, блок вычисления скорости, блок задания начальной скорости, блок коррекции скорости, блок вычисления координат, блок задания начальных координат, блок вычисления погрешности по координатам, блок фильтрации погрешности по координатам, блок оценки погрешности скорости по координатам, при этом первый вход блока коррекции ускорения соединен с выходом блока введения поправок Кориолиса и ускорения силы тяжести Земли, первый и второй входы блока вычисления скорости соединены с выходом блока коррекции ускорения и с выходом блока задания начальной скорости, первый и второй входы блока вычисления координат соединены с выходом блока коррекции скорости и с выходом блока задания начальных координат, первый вход блока фильтрации погрешности по координатам соединен с выходом блока вычисления погрешности по координатам, вход блока оценки погрешности скорости по координатам соединен с выходом блока фильтрации погрешности по координатам, выход блока оценки погрешности скорости по координатам соединен со вторым входом блока коррекции скорости.
Общими признаками заявляемой БИКВ и известной БИКВ [5] являются формирователь производных от углов ориентации, блок коррекции, блок интеграторов, блок вычисления погрешности угловой ориентации, фильтр, блок вычисления наблюдаемой вертикали, при этом второй вход формирователя производных от углов ориентации соединен с выходом блока интеграторов, входы блока коррекции соединены с выходом формирователя производных от углов ориентации и выходом фильтра, вход блока интеграторов соединен с выходом блока коррекции, первый вход блока вычисления погрешности угловой ориентации соединен с выходом блока интеграторов, первый вход фильтра соединен с выходом блока вычисления погрешности угловой ориентации.
Общим признаком заявляемого способа коррекции инерциальных датчиков и известного способа коррекции датчиков [6, с.74-76] является то, что компенсируют погрешности измерений.
Общим признаком заявляемого устройства коррекции инерциальных датчиков и известного измерительного устройства [6, с.74-76, рис.17] является блок компенсации погрешности измерений.
Решаемой технической задачей предлагаемой группы изобретений является снижение погрешности определения параметров движения ЛА при использовании датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации.
Техническим результатом является снижение погрешности вычисления вектора скорости, радиус-вектора в нормальной земной системе координат и вектора угловой ориентации ЛА.
Поставленная задача решается за счет того, что:
- в навигационном комплексе бортовой вычислитель выполнен в виде БИКВ и устройства вычисления скорости и координат, при этом первый вход устройства вычисления скорости и координат соединен с выходом трехканального блока ДЛУ, второй и третий входы устройства вычисления скорости и координат соединены с первым и вторым выходами блока измерения координат, четвертый и пятый входы устройства вычисления скорости и координат соединены с первым и вторым выходами блока измерения скорости, шестой и седьмой входы устройства вычисления скорости и координат соединены с первым и вторым выходами БИКВ, первый и второй входы БИКВ соединены с выходом трехканального блока ДУС и с выходом трехстепенного магнитного датчика направления, а третий, четвертый, пятый и шестой входы БИКВ соединены с третьим, четвертым, пятым и первым выходами устройства вычисления скорости и координат соответственно, первый и второй выходы устройства вычисления скорости и координат являются выходами вектора скорости и радиус-вектора в нормальной земной системе координат после коррекции, а первый выход БИКВ является выходом вектора угловой ориентации;
- в устройство вычисления скорости и координат введены устройство коррекции инерциальных датчиков, блок пересчета скорости из связанной системы координат в нормальную земную, блок коррекции координат, блок оценки присутствия погрешности по скорости в связанной системе координат, блок оценки присутствия погрешности по ускорению, при этом первый, второй и третий входы устройства коррекции инерциальных датчиков соединены с первым входом устройства вычисления скорости и координат и с первым и вторым выходами блока оценки присутствия погрешности по ускорению соответственно, выход устройства коррекции инерциальных датчиков соединен с первым входом блока введения поправок Кориолиса и ускорения силы тяжести Земли и с четвертым выходом устройства вычисления скорости и координат, второй, третий и четвертый входы блока введения поправок Кориолиса и ускорения силы тяжести Земли соединены с шестым и седьмым входами устройства вычисления скорости и координат и с выходом блока вычисления скорости соответственно, второй вход блока коррекции ускорения соединен с первым выходом блока оценки присутствия погрешности по ускорению, первый и второй входы блока пересчета скорости из связанной системы координат в нормальную земную соединены с выходом блока вычисления скорости и с шестым входом устройства вычисления скорости и координат, первый вход блока коррекции скорости соединен с выходом блока пересчета скорости из связанной системы координат в нормальную земную, первый и второй входы блока коррекции координат соединены с выходом блока вычисления координат и с выходом блока фильтрации погрешности по координатам, первый, второй и третий входы блока вычисления погрешности по координатам соединены с выходом блока коррекции координат и со вторым и третьим входами устройства вычисления скорости и координат соответственно, второй вход блока фильтрации погрешности по координатам соединен с третьим входом устройства вычисления скорости и координат, первый и второй входы блока оценки присутствия погрешности по скорости в связанной системе координат соединены с выходом блока оценки погрешности скорости по координатам и с шестым входом устройства вычисления скорости и координат, первый и второй входы блока оценки присутствия погрешности по ускорению соединены с выходом блока оценки присутствия погрешности по скорости в связанной системе координат и с третьим входом устройства вычисления скорости и координат, первый, второй, третий и пятый выходы устройства вычисления скорости и координат соединены с выходом блока коррекции скорости, с выходом блока коррекции координат, со вторым выходом блока оценки присутствия погрешности по ускорению и с выходом блока оценки присутствия погрешности по скорости в связанной системе координат соответственно;
- а также в устройство вычисления скорости и координат дополнительно введены блок вычисления погрешности по скорости и блок фильтрации погрешности по скорости, при этом первый, второй и третий входы блока вычисления погрешности по скорости соединены с выходом блока коррекции скорости, с четвертым и пятым входами устройства вычисления скорости и координат соответственно, первый и второй входы блока фильтрации погрешности по скорости соединены с выходом блока вычисления погрешности по скорости и с пятым входом устройства вычисления скорости и координат, третий вход блока оценки присутствия погрешности по ускорению соединен с пятым входом устройства вычисления скорости и координат, выход блока фильтрации погрешности по скорости соединен с третьим входом блока оценки присутствия погрешности по скорости в связанной системе координат и с третьим входом блока коррекции скорости;
- в БИКВ введены устройство коррекции инерциальных датчиков, блок введения поправки на угловую скорость вращения Земли, блок коррекции угловых скоростей, блок оценки присутствия погрешности по угловой скорости, блок коррекции наблюдаемых углов ориентации, блок вычисления наблюдаемого угла рысканья, блок вычисления магнитного курса, при этом первый, второй и третий входы устройства коррекции инерциальных датчиков соединены с первым входом БИКВ, выходом блока оценки присутствия погрешности по угловой скорости и третьим входом БИКВ соответственно, первый и второй входы блока введения поправки на угловую скорость вращения Земли соединены с выходом устройства коррекции инерциальных датчиков и с выходом блока интеграторов, входы блока коррекции угловых скоростей соединены с выходом блока введения поправки на угловую скорость вращения Земли и с выходом блока оценки присутствия погрешности по угловой скорости, первый вход формирователя производных от углов ориентации соединен с выходом блока коррекции угловых скоростей, первый и второй входы блока оценки присутствия погрешности по угловой скорости соединены с выходом фильтра и с выходом блока интеграторов, второй вход блока вычисления погрешности угловой ориентации соединен с выходом блока коррекции наблюдаемых углов ориентации, первый вход блока коррекции наблюдаемых углов ориентации соединен с выходом блока вычисления наблюдаемой вертикали и выходом блока вычисления наблюдаемого угла рысканья, вход блока вычисления наблюдаемой вертикали соединен с четвертым входом БИКВ, первый вход блока вычисления наблюдаемого угла рысканья соединен с выходом блока вычисления магнитного курса, первый и второй входы которого соединены со вторым входом БИКВ и с выходом блока интеграторов, первый и второй выходы БИКВ соединены с выходом блока интеграторов и с выходом устройства коррекции инерциальных датчиков соответственно;
- а также в БИКВ дополнительно введен блок выработки признаков включения коррекции угловой ориентации, вход которого соединен с выходом формирователя производных от углов ориентации, а выход соединен со вторым входом фильтра;
- а также в БИКВ дополнительно введены блок оценки присутствия погрешности угловой ориентации и блок вычисления погрешности наблюдаемых углов ориентации, при этом первый, второй и третий входы блока оценки присутствия погрешности угловой ориентации соединены с шестым и пятым входами БИКВ и с выходом блока интеграторов соответственно, первый и второй входы блока вычисления погрешности наблюдаемых углов ориентации соединены с выходом блока оценки присутствия погрешности угловой ориентации и с третьим входом БИКВ соответственно, выход блока вычисления погрешности наблюдаемых углов ориентации соединен со вторым входом блока коррекции наблюдаемых углов ориентации;
- а также в БИКВ дополнительно введен блок коррекции магнитного курса, первый, второй и третий входы которого соединены с выходом блока вычисления магнитного курса, выходом блока вычисления погрешности наблюдаемых углов ориентации и третьим входом БИКВ соответственно, выход блока коррекции магнитного курса соединен со вторым входом блока вычисления наблюдаемого угла рысканья;
- в способе коррекции инерциальных датчиков оценивают присутствие погрешности измерений, вычисляют аддитивную составляющую полной погрешности измерений, при этом оценку присутствия погрешности измерений производят по погрешностям вычисляемых характеристик движения, а аддитивную составляющую полной погрешности измерений вычисляют изодромным преобразованием оценки присутствия погрешности измерений;
- а также в способе коррекции инерциальных датчиков вычисляют погрешности крутизны характеристик инерциальных датчиков, определяют знак сдвинутого по фазе результата измерений, вычисляют мультипликативную составляющую полной погрешности измерений, при этом фазовый сдвиг результата измерений определяют по фазовому смещению оценки присутствия погрешности измерений относительно результата измерений, погрешности крутизны характеристик инерциальных датчиков вычисляют изодромным преобразованием произведения оценки присутствия погрешности измерений на знак сдвинутого по фазе результата измерений, а мультипликативную составляющую полной погрешности измерений вычисляют умножением погрешности крутизны характеристик инерциальных датчиков на результат измерений;
- в устройство коррекции инерциальных датчиков введен блок вычисления аддитивной погрешности измерений, при этом первый и второй входы блока компенсации погрешности измерений соединены с первым входом устройства коррекции инерциальных датчиков и с выходом блока вычисления аддитивной погрешности измерений, первый вход которого соединен со вторым входом устройства коррекции инерциальных датчиков, выход блока компенсации погрешности измерений соединен с выходом устройства коррекции инерциальных датчиков;
- а также в устройство коррекции инерциальных датчиков дополнительно введены блок вычисления погрешности крутизны характеристик инерциальных датчиков, блок фазовых согласований, блок вычисления мультипликативной погрешности измерений, при этом первый и второй входы блока вычисления погрешности крутизны характеристик инерциальных датчиков соединены со вторым входом устройства коррекции инерциальных датчиков и с выходом блока фазовых согласований, первый и второй входы которого соединены с выходом блока компенсации погрешности измерений и третьим входом устройства коррекции инерциальных датчиков, первый и второй входы блока вычисления мультипликативной погрешности измерений соединены с выходом блока вычисления погрешности крутизны характеристик инерциальных датчиков и выходом блока компенсации погрешности измерений, выход блока вычисления мультипликативной погрешности измерений соединен с третьим входом блока компенсации погрешности измерений;
- а также в устройство коррекции инерциальных датчиков дополнительно введен блок режима коррекции, выход которого соединен со вторым входом блока вычисления аддитивной погрешности измерений и третьим входом блока вычисления погрешности крутизны характеристик инерциальных датчиков.
Предлагаемые изобретения поясняются графическими материалами, где представлены:
на фиг.1 - функциональная схема навигационного комплекса, на которой показаны: 1 - БИКВ, 2 - устройство вычисления скорости и координат, 3 - трехканальный блок ДЛУ, 4 - блок измерения координат, 5 -блок измерения скорости, 6 - трехстепенной магнитный датчик направления, 7 - трехканальный блок ДУС, ψим - вектор измеренного магнитного поля, Ωu - вектор измеренной угловой скорости, nu - вектор измеренного линейного ускорения, Lug - измеренный радиус-вектор в нормальной земной системе координат, JL - массив признаков достоверности радиус-вектора, Vug - измеренный вектор скорости в нормальной земной системе координат, JV - массив признаков достоверности вектора скорости, Lgk - радиус-вектор в нормальной земной системе координат после коррекции, Vgk - вектор скорости в нормальной земной системе координат после коррекции, U - вектор угловой ориентации, Ωuk - вектор угловой скорости после коррекции, JU - массив признаков достоверности присутствия погрешности по ускорению, nuk - вектор линейного ускорения после коррекции, dVсв - вектор оценки присутствия погрешности по скорости в связанной системе координат;
на фиг.2 - функциональная схема устройства вычисления скорости и координат, на которой показаны: 8 - устройство коррекции инерциальных датчиков, 9 - блок введения поправок Кориолиса и ускорения силы тяжести Земли, 10 - блок коррекции ускорения, 11 - блок вычисления скорости, 12 - блок задания начальной скорости, 13 - блок пересчета скорости из связанной системы координат в нормальную земную, 14 - блок коррекции скорости, 15 - блок вычисления координат, 16 - блок задания начальных координат, 17 - блок коррекции координат, 18 - блок вычисления погрешности по координатам, 19 - блок фильтрации погрешности по координатам, 20 - блок оценки погрешности скорости по координатам, 21 - блок оценки присутствия погрешности по скорости в связанной системе координат, 22 - блок оценки присутствия погрешности по ускорению, 23 - блок вычисления погрешности по скорости, 24 - блок фильтрации погрешности по скорости, nсв - вектор линейного ускорения в связанной системе координат, nсв k - вектор линейного ускорения в связанной системе координат после коррекции, V0 - вектор начальной скорости в связанной системе координат, Vсв - вектор скорости в связанной системе координат, Vg - вектор скорости в нормальной земной системе координат, L0 - радиус-вектор начального положения в нормальной земной системе координат, Lg - радиус-вектор в нормальной земной системе координат, dLg - вектор погрешности радиус-вектора, dLgk - вектор фильтрованной погрешности радиус-вектора, dVgLk - вектор оценки погрешности скорости по координатам, dnсв - вектор оценки присутствия погрешности по ускорению, dVg - вектор погрешности вектора скорости, dVgVk - вектор фильтрованной погрешности вектора скорости, описание других векторов представлено в описании к фиг.1;
на фиг.3 - функциональная схема БИКВ, на которой показаны: 25 - устройство коррекции инерциальных датчиков, 26 - блок введения поправки на угловую скорость вращения Земли, 27 - блок коррекции угловых скоростей, 28 - формирователь производных от углов ориентации, 29 - блок коррекции, 30 - блок интеграторов, 31 - блок вычисления погрешности угловой ориентации, 32 - фильтр, 33 - блок оценки присутствия погрешности по угловой скорости, 34 - блок коррекции наблюдаемых углов ориентации, 35 - блок вычисления наблюдаемой вертикали, 36 - блок вычисления наблюдаемого угла рысканья, 37 - блок вычисления магнитного курса, 38 - блок выработки признаков включения коррекции угловой ориентации, 39 - блок оценки присутствия погрешности угловой ориентации, 40 - блок вычисления погрешности наблюдаемых углов ориентации, 41 - блок коррекции магнитного курса, Ωсв - вектор угловой скорости в связанной системе координат, Ωсв k - вектор угловой скорости в связанной системе координат после коррекции,  - вектор производных угловой ориентации,
- вектор производных угловой ориентации,  - вектор производных угловой ориентации после коррекции, ΔU - вектор погрешности угловой ориентации, ΔUф - вектор фильтрованной погрешности угловой ориентации, ΔΩ - вектор оценки присутствия погрешности по угловой скорости, Uнk - вектор наблюдаемой угловой ориентации после коррекции, Uн - вектор наблюдаемой угловой ориентации, Uнв - вектор наблюдаемой вертикали, ψн - наблюдаемый угол рысканья, ψм - магнитный курс, J - массив признаков включения коррекции угловой ориентации, dUV - вектор оценки присутствия погрешности угловой ориентации, ΔUн - вектор оценки погрешности наблюдаемой угловой ориентации, Δψн - оценка погрешности наблюдаемого угла рысканья, Δψм - оценка погрешности магнитного курса, описание других векторов представлено в описании к фиг.1;
- вектор производных угловой ориентации после коррекции, ΔU - вектор погрешности угловой ориентации, ΔUф - вектор фильтрованной погрешности угловой ориентации, ΔΩ - вектор оценки присутствия погрешности по угловой скорости, Uнk - вектор наблюдаемой угловой ориентации после коррекции, Uн - вектор наблюдаемой угловой ориентации, Uнв - вектор наблюдаемой вертикали, ψн - наблюдаемый угол рысканья, ψм - магнитный курс, J - массив признаков включения коррекции угловой ориентации, dUV - вектор оценки присутствия погрешности угловой ориентации, ΔUн - вектор оценки погрешности наблюдаемой угловой ориентации, Δψн - оценка погрешности наблюдаемого угла рысканья, Δψм - оценка погрешности магнитного курса, описание других векторов представлено в описании к фиг.1;
на фиг.4 - функциональная схема устройства коррекции инерциальных датчиков, на которой показаны: 42 - блок компенсации погрешности измерений, 43 - блок вычисления аддитивной погрешности измерений, 44 - блок вычисления погрешности крутизны характеристик инерциальных датчиков, 45 - блок фазовых согласований, 46 - блок вычисления мультипликативной погрешности измерений, 47 - блок режима коррекции, Qu - вектор измерений инерциальных датчиков, Quk - вектор измерений инерциальных датчиков после коррекции, dQсв - вектор оценки присутствия погрешности измерений в связанной системе координат, dQk0 - вектор аддитивной погрешности измерений, Qukф - согласованный по фазе вектор измерений инерциальных датчиков после коррекции, dk - массив оценки погрешности крутизны характеристик инерциальных датчиков, dQkk - вектор мультипликативной погрешности измерений, JQ - массив признаков включения режима коррекции;
на фиг.5 - графики погрешности определения координат малоразмерного БПЛА (в нормальной земной системе координат: а) по оси X, б) по оси Y, в) по оси Z) при горизонтальном полете по прямолинейному участку траектории, умеренном ветре и турбулентности атмосферы, с использованием датчиков средней точности (погрешности инерциальных датчиков: нуля ДУС ±0.02°/c; крутизны характеристики ДУС 5%; нуля ДЛУ ±0.1 м/с2; крутизны характеристики ДЛУ 1%; магнитного датчика направления ±2°) и отключении коррекции (автономный полет) с 600 до 1200 секунды;
на фиг.6 - графики погрешности определения скорости малоразмерного БПЛА (в нормальной земной системе координат: а) по оси X, б) по оси Y, в) по оси Z) при горизонтальном полете по прямолинейному участку траектории, умеренном ветре и турбулентности атмосферы, с использованием датчиков средней точности (погрешности инерциальных датчиков: нуля ДУС ±0.02%; крутизны характеристики ДУС 5%; нуля ДЛУ ±0.1 м/с2; крутизны характеристики ДЛУ 1%; магнитного датчика направления ±2°) и отключении коррекции (автономный полет) с 600 до 1200 секунды;
на фиг.7 - графики погрешности определения углов ориентации малоразмерного БПЛА (связанной системы координат относительно нормальной земной системы координат: а) по углу крена, б) по углу рысканья, в) по углу тангажа) при горизонтальном полете по прямолинейному участку траектории, умеренном ветре и турбулентности атмосферы, с использованием датчиков средней точности (погрешности инерциальных датчиков: нуля ДУС ±0.02°/c; крутизны характеристики ДУС 5%; нуля ДЛУ ±0.1 м/с2; крутизны характеристики ДЛУ 1%; магнитного датчика направления ±2°) и отключении коррекции (автономный полет) с 600 до 1200 секунды.
Заявляемый навигационный комплекс (фиг.1) вычисляет вектор угловой ориентации U{γ,ψ,ϑ} (выход 1 БИКВ 1), где γ -угол крена; ψ -угол рысканья; ϑ - угол тангажа, вектор скорости в нормальной земной системе координат после коррекции
Vgk {VXgk, VYgk, Vzgk} (выход 1 устройства вычисления скорости и координат 2), где VXgk, VYgk, VZgk - проекции вектора скорости после коррекции на оси нормальной земной системы координат, радиус-вектор в нормальной земной системе координат после коррекции Lgk {Хgk, Ygk, Zgk} (выход 2 устройства вычисления скорости и координат 2), где Хgk, Ygk, Zgk - координаты в нормальной земной системе координат после коррекции. При вычислениях в устройстве вычисления скорости и координат 2 используется вектор линейного ускорения nu {nXu, nYu, nZu} (вход 1), измеренного трехканальным блоком ДЛУ 3, радиус-вектор в нормальной земной системе координат Lug {Xug, Yug, Zug} (вход 2) и массив признаков достоверности радиус-вектора JL {JX, JY, JZ] (вход 3), оцененные блоком измерения координат 4 (выходы 1 и 2), вектор скорости в нормальной земной системе координат Vug {VXug, VYug, VZug} (вход 4) и массив признаков достоверности вектора скорости JV {JVX, JVY,
JVZ} (вход 5), оцененные блоком измерения скорости 5 (выходы 1 и 2). При вычислениях в БИКВ 1 используется вектор угловой скорости Ωu {ΩXu, ΩYu, ΩZu} (вход 1), измеренной трехканальным блоком ДУС 7, и вектор измеренного поля ψuм {Xuм, Yuм, Zuм (вход 2), измеренного трехстепенным магнитным датчиком направления 6.
Между БИКВ 1 и устройством вычисления скорости и координат 2 осуществляется обмен данными. С выходов 1, 3, 4 и 5 устройства вычисления скорости и координат 2 на входы 6, 3, 4 и 5 БИКВ 1 передаются вектор Vgk, массив признаков достоверности присутствия погрешности по ускорению JU {JU1, JU2, JU3}, вектор линейного ускорения после коррекции nuk {nXuk, nYuk, nZuk} и вектор оценки присутствия погрешности по скорости в связанной системе координат dVсв {dVXсв, dVYсв, dVZсв} соответственно. С выходов 1 и 2 БИКВ 1 на входы 6 и 7 устройства вычисления скорости и координат 2 передаются вектор угловой ориентации U и вектор угловой скорости после коррекции Ωuk {ΩXuk, ΩYuk, ΩZuk} соответственно.
Измерения векторов nu, Ωu, ψuм блоками 3, 7 и 6 соответственно выполняются непрерывно. Эти измерения обеспечивают вычисление векторов Lgk, Vgk и U с низкой точностью. Повышение точности вычислений достигается при использовании оценок Lug и/или Vug, выполненых при наличии внешних измерений блоками 4 и/или 5, о чем свидетельствуют признаки достоверности JL и JV, компоненты которых по каждой координате принимают значения {1 0}. Если соответствующий признак принимает единичное значение, то соответствующая оценка координаты и/или скорости используется для коррекции устройства вычисления скорости и координат 2. После завершения коррекции, которая может продолжаться от трех до пяти минут, вычисления Lgk и Vgk выполняются с высокой точностью, которая сохраняется даже при отсутствии внешних измерений блоками 4 и/или 5. Подтверждение эффективности коррекции иллюстрируют графики, приведенные на фиг.5 и фиг.6. Блоки 4 и 5 для оценки Lug и/или Vug используют, кроме СРНС, также СРЛИ и СВС. При измерении одних и тех же навигационных параметров различными измерителями приоритет или априорно отдается тому измерителю, надежность и точность измерений которого в конкретных условиях полета наибольшая, или выполняется комплексирование навигационных измерителей в соответствии с известными методами, изложенными в литературе, например в книге [8, с.138-147]. При временном отключении внешних измерителей, что возможно в сложных условиях полета и при постановке активных помех, погрешность вычисления Lgk и Vgk увеличивается, однако при восстановлении достоверности внешних измерений высокая точность вычисления Lgk и Vgk восстанавливается (см. фиг.5 и 6). Векторы nuk и Ωuk вычисляются также с высокой точностью. При подключении на вход 4 БИКВ 1 вектора nuk, а затем при подключении на входы 3, 5 и 6 векторов JU, dVсв и Vgk соответственно поэтапно увеличивается точность вычисления векторов U и Ωuk. Высокая точность вычисления U и Ωuk сохраняется даже при отсутствии корректирующих воздействий с устройства вычисления скорости и координат 2. Подтверждение эффективности коррекции иллюстрируют графики, приведенные на фиг.7. За 10 минут автономной работы БИКВ 1 погрешности вычисления углов ориентации не увеличиваются. Вычисленные с высокой точностью векторы U и Ωuk обеспечивают повышение точности вычисления векторов Lgk и Vgk устройством вычисления скорости и координат 2, а также векторов nuk, dVсв и Vgk, используемых для коррекции БИКВ 1, т.е. выполняется взаимная коррекция устройств, входящих в навигационный комплекс.
Устройство вычисления скорости и координат (фиг.2) вычисляет векторы Vgk и Lgk (выходы 1 и 2 соответственно). На его вход 1 подается вектор nu, который содержит погрешности измерения, обусловленные использованием ДЛУ средней точности. Вектор nu поступает на вход 1 устройства коррекции инерциальных датчиков 8, которое компенсирует погрешности измерения, используя вектор оценки присутствия погрешности по ускорению dnсв {dnX св, dnY св, dnZ св} и массив JU, поданные на входы 2 и 3 устройства 8. Вектор nuk с выхода устройства 8 подается на выход 4 устройства вычисления скорости и координат и на вход 1 блока 9, который вычитает из вектора nuk поправки Кориолиса и ускорение силы тяжести Земли [3, уравн. (7.10)], используя векторы U и Ωuk (входы 2 и 3 блока 9), поданные на входы 6 и 7 устройства вычисления скорости и координат, и вектор Vсв, поданный на вход 4 блока 9. Выходным сигналом блока 9 является вектор линейного ускорения в связанной системе координат nсв {nX св, nY св, nZ св}, однако он также вычисляется с погрешностями, обусловленными неполной компенсацией погрешности вектора nu устройством 8 и неточной компенсацией поправок Кориолиса и ускорения силы тяжести Земли блоком 9. Блок 10 вычитает из вектора nсв (вход 1) вектор dnсв (вход 2). После завершения переходных процессов в устройстве 8 и блоках 9 и 10 погрешность вычисления вектора линейного ускорения в связанной системе координат после коррекции nсв k{nX св k, nY св k, nZ св k} уменьшается в десятки раз и достигает уровня погрешности акселерометров высокой точности. В блоке 11 вектор nсв k (вход 1) интегрируется с использованием вектора начальной скорости в связанной системе координат V0 {VX0, VY0, VZ0} (вход 2), введенного с блока 12. Полученный на выходе блока 11 вектор скорости в связанной системе координат Vсв {VX cв, VY cв, VZ cв} подается на блок 13 (вход 1), где преобразуется в вектор скорости в нормальной земной системе координат Vg {VXg, VYg, VZg} [9, с.41-43] с использованием вектора U (вход 2). Однако преобразование координат может выполняться с погрешностями, обусловленными погрешностями углов ориентации U, поданными на вход 2 блока 13 с входа 6 устройства вычисления скорости и координат. Блок 14 вычитает из вектора Vg, поданного на вход 1, вектор оценки погрешности скорости по координатам dVgLk {dVgXk, dVgYk, dVgZk}, поданный на вход 2, и вычисляет вектор Vgk, который подается на выход 1 устройства вычисления скорости и координат и на вход 1 блока 15. Вектор Vgk вычисляется с высокой точностью, так как его вычисление сопровождается поэтапной коррекцией, компенсирующей все возможные погрешности, возникающие в процессе измерения и вычисления, причем компенсация выполняется до сведения к нулю всех составляющих погрешности вектора Vgk. Блок 15 интегрирует вектор Vgk, поданный на его вход 1, с учетом радиус-вектора начального положения в нормальной земной системе координат L0 {X0, Y0, Z0}, поданного на вход 2 с блока 16. Радиус-вектор в нормальной земной системе координат Lg {Xg, Yg, Zg} на выходе блока 15 также может содержать погрешности, накопившиеся в процессе интегрирования, поэтому он пропускается через блок коррекции координат 17, где из радиус-вектора Lg (вход 1) вычитается вектор фильтрованной погрешности радиус-вектора dLgk {dXgk, dYgk, dZgk} (вход 2). Радиус-вектор Lgk вычисляется с высокой точностью, обусловленной компенсацией всех возможных погрешностей, возникающих в процессе измерения и вычисления, причем компенсация выполняется до сведения к нулю всех составляющих погрешности радиус-вектора Lgk. Радиус-вектор Lgk подается на выход 2 устройства вычисления скорости и координат и на вход 1 блока 18, на входы 2 и 3 которого подаются радиус-вектор Lug и массив JL, которые поступают соответственно на входы 2 и 3 устройства вычисления скорости и координат. Блок 18 вычисляет вектор погрешности радиус-вектора dLg {dXg, dYg, dZg} и подает его на вход 1 блока 19, на вход 2 которого подается массив JL. Вектор dLg может вычисляться или вычитанием радиус-вектора Lug из радиус-вектора Lgk, или комплексированием указанных векторов известными методами [8, с.138-147]. Блок 19 фильтрует погрешности по координатам, при этом может использоваться дискретный фильтр Калмана [10, с.40-52] или более простой фильтр, например цифровой фильтр первого порядка [11, с.425-426]. При достоверности внешних измерений на выходе блока 19 формируется вектор dLgk, который подается на вход 2 блока 17 и на вход блока 20. Блок 17 за короткий промежуток времени (5…10 с) компенсирует накопившуюся погрешность вычисления радиус-вектора Lgk. Присутствие этого блока в устройстве вычисления скорости и координат особенно важно при периодическом пропадании оценки радиус-вектора Lug, что возможно в сложных условиях разведывательных операций и постановки активных помех. Процесс быстрой компенсации накопившейся погрешности иллюстрируют характеристики, приведенные на фиг.5. Блок 20 преобразует вектор dLgk в вектор оценки погрешности скорости по координатам dVgLk {dVX gLk, dVY gLk, dVZ gLk}, причем передаточная функция блока 15 определяется из условия получения оптимального переходного процесса в контуре из блоков с 14 по 20. Однако при компенсации большей доли погрешности dLg контуром из блоков с 17 по 19 передаточная функция блока 20 может быть упрощена до постоянного коэффициента. Вектор dVgLk поступает на вход 2 блока 14 и на вход 1 блока 21. Блок 21 преобразует вектор dVgLk из нормальной земной системы координат в связанную [9, с.41-43], используя вектор U, поданный на вход 2 блока 21 с входа 6 устройства вычисления скорости и координат. С выхода блока 21 вектор dVсв поступает на вход 1 блока 22 и на выход 5 устройства вычисления скорости и координат. На входы 2 и 3 блока 22 подаются массивы JL и JV с входов 3 и 5 устройства вычисления скорости и координат, поэтому блок 22 вычисляет и подает на выход 1 вектор dnсв только при единичных значениях соответствующих компонент массивов JL или JV. Одновременно он формирует на выходе 2 массив JU в зависимости от значений компонент массивов JL или JV и подает на вход 3 устройства коррекции инерциальных датчиков 8 и на выход 3 устройства вычисления скорости и координат. Следовательно, совокупностью введенных блоков 13, 17, 21, 22 и устройства 8, а также связей между ними, решается поставленная задача снижения погрешности вычисления вектора скорости и радиус-вектора в нормальной земной системе координат.
Дополнительное снижение погрешности вычисления векторов Lgk и Vgk достигается введением векторов Vgk, поданного с выхода блока 14 на вход 1 блока 23, Vug и массива JV, поданных на входы 2 и 3 блока 23 с входов 4 и 5 устройства вычисления скорости и координат. Блок 23 вычисляет вектор погрешности вектора скорости dVg {dVXg, dVYg, dVZg} и подает на вход 1 блока 24, на вход 2 которого подается массив JV. Вычисление вектора dVg выполняется аналогично вычислению вектора dLg. Блок 24 фильтрует погрешности по скорости, при этом может использоваться дискретный фильтр Калмана [10, с.40-52] или более простой фильтр, например цифровой фильтр первого порядка [11, с.425-426]. При достоверности внешних измерений вектора скорости на выходе блока 24 формируется вектор фильтрованной погрешности вектора скорости dVgVk {dVX gVk, dVY gVk, dVZ gVk}, который подается на вход 3 блока 14 и на вход 3 блока 21. Блок 14 за короткий промежуток времени (5…10 с) компенсирует накопившуюся погрешность вычисления вектора Vgk (см. фиг.6). Такая компенсация при вычислении скорости особенно важна при периодическом пропадании измерений радиус-вектора Lug и/или вектора скорости Vug, что возможно в сложных условиях разведывательных операций и постановки активных помех, так как она уменьшает погрешности по скорости Vgk и благоприятно влияет на динамические характеристики последующих блоков. Уменьшаются динамические погрешности вычисления и вектора скорости Vgk, и радиус-вектора Lgk. Дополнительная компенсация погрешности по скорости в блоке 21 уточняет вектор оценки присутствия погрешности по скорости dVcв, повышая точность оценки присутствия погрешности по ускорению dnсв на выходе 1 блока 22 и, тем самым, повышая точность коррекции инерциальных датчиков и снижая погрешности вычисления вектора скорости и радиус-вектора в нормальной земной системе координат.
БИКВ вычисляет вектор угловой ориентации U (фиг.3). На его вход 1 подается вектор измеренной угловой скорости Ωu, который содержит погрешности измерения, обусловленные использованием ДУС средней точности. Вектор Ωu поступает на вход 1 устройства коррекции инерциальных датчиков 25, которое компенсирует погрешности измерения, используя вектор оценки присутствия погрешности по угловой скорости ΔΩ {ΔΩX, ΔΩAY, ΔΩZ} (вход 2) и массив JU, поданный на вход 3 устройства 25 с входа 3 БИКВ. Вектор Ωuk с выхода устройства 25 подается на выход 2 БИКВ и на вход 1 блока 26. Блок 26 вычитает из вектора Ωuk (вход 1) поправки на угловую скорость вращения Земли, используя вектор U, поданный на вход 2. Выходным сигналом блока 26 является вектор угловой скорости в связанной системе координат Ωсв {ΩXсв, ΩYсв, ΩZсв}, однако он также вычисляется с погрешностями, обусловленными неполной компенсацией погрешности вектора измеренной угловой скорости Ωu устройством 25 и неточной компенсацией угловой скорости вращения Земли блоком 26. Блок 27 из вектора Ωсв (вход 1) вычитает вектор ΔΩ (вход 2). После завершения переходных процессов в устройстве 25 и блоках 26 и 27 погрешность вектора угловой скорости в связанной системе координат после коррекции Ωсв k {ΩXсв k, ΩYсв k, ΩZсв k} уменьшается в десятки раз и достигает уровня погрешности ДУС высокой точности. Вектор Ωсв k подается на вход 1 формирователя производных от углов ориентации 28, который преобразует его в вектор производных угловой ориентации  [12, с.36, форм. (2.44)], где
[12, с.36, форм. (2.44)], где  - производная от угла крена,
- производная от угла крена,  - производная от угла рысканья и
- производная от угла рысканья и  - производная от угла тангажа, с использованием вектора U, поданного на вход 2. Производные угловой ориентации содержат погрешности, обусловленные систематическими и случайными погрешностями измерений датчиков, не полностью скомпенсированных блоками с 25 по 27, поэтому с выхода блока 28 вектор
- производная от угла тангажа, с использованием вектора U, поданного на вход 2. Производные угловой ориентации содержат погрешности, обусловленные систематическими и случайными погрешностями измерений датчиков, не полностью скомпенсированных блоками с 25 по 27, поэтому с выхода блока 28 вектор  подается на вход 1 блока 29, где из него вычитается вектор фильтрованной погрешности угловой ориентации ΔUф {Δγф, Δψф, Δϑф}, поданный на вход 2. Полученный на выходе блока 29 вектор производных угловой ориентации после коррекции
подается на вход 1 блока 29, где из него вычитается вектор фильтрованной погрешности угловой ориентации ΔUф {Δγф, Δψф, Δϑф}, поданный на вход 2. Полученный на выходе блока 29 вектор производных угловой ориентации после коррекции 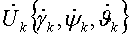 интегрируются блоком интеграторов 30. При интегрировании вектора
интегрируются блоком интеграторов 30. При интегрировании вектора  погрешности не накапливаются, так как в нет постоянной составляющей погрешности. Блок интеграторов 30 является фильтром нижних частот U, следовательно, подавляет высокочастотную составляющую шумов в векторе U, который подается на выход 1 БИКВ.
погрешности не накапливаются, так как в нет постоянной составляющей погрешности. Блок интеграторов 30 является фильтром нижних частот U, следовательно, подавляет высокочастотную составляющую шумов в векторе U, который подается на выход 1 БИКВ.
При полном отсутствии погрешностей ДУС вычисленные углы ориентации совпадали бы с углами истинными. Однако вычисленный вектор угловой ориентации U содержит статические и динамические погрешности. Статические погрешности обусловлены интегрированием погрешностей, не полностью скомпенсированных блоками с 25 по 27 и 29. Динамические погрешности обусловлены недостаточной эффективностью фильтрации сигналов блоком интеграторов 30. Блок 31 вычисляет вектор погрешности угловой ориентации ΔU {Δγ, Δψ, Δϑ} вычитанием из вектора угловой ориентации U, поданного на вход 1, вектора наблюдаемой угловой ориентации после коррекции Uнk {γнk, ψнk, ϑнk}, поданного на вход 2. В структуре выходного сигнала блока 31 отсутствует точная информация об углах ориентации, но сохраняются погрешности. Полученные на выходе блока 31 сигналы пропускаются через фильтр 32 (вход 1), который вычисляет вектор фильтрованной погрешности угловой ориентации ΔUф. В блоке 32 может быть реализован дискретный фильтр Калмана [10, с.40-52] или более простой фильтр, например цифровой фильтр первого порядка [11, с.425-426]. На выходе фильтра 32 сохраняются преимущественно низкочастотные составляющие погрешности, которые при поступлении на вход 2 блока 29 скомпенсируют погрешности вектора . Эта компенсация будет непрерывно действующей и полной, так как контур, содержащий блоки с 29 по 32, замкнут с инверсией знака, и содержит операцию интегрирования.
Изменение вектора угловой ориентации U будет приводить к изменению погрешности вектора производных угловой ориентации , причем соотношения между указанными векторами являются нелинейными. Поэтому контур, содержащий блоки с 29 по 32, будет компенсировать погрешность, постоянно находясь в динамическом режиме работы, что определит более высокий уровень погрешности вычисления вектора U. Снижение погрешности вычисления вектора U может иметь место только в случае полной компенсации погрешности вычисления вектора , а вектор ΔUф станет нулевым и в динамическом режиме. В свою очередь, такое состояние может быть достигнуто только в случае полной компенсации погрешностей ДУС. Устройство коррекции инерциальных датчиков 25 компенсирует погрешности ДУС, используя вектор оценки присутствия погрешности по угловой скорости ΔΩ (вход 2), который вычисляется блоком 33, выполняющим операцию преобразования вектора ΔUф (вход 1) в вектор ΔΩ как операцию, обратную операции преобразования вектора Ωсв k в вектор [12, с.36, форм. (2.44)] с использованием вектора U (вход 2), причем указанное преобразование оценивает присутствие погрешности по угловой скорости ΔΩ, не давая количественной оценки, что при выбранной структуре системы компенсации погрешности и не требуется. Погрешности ДУС будут полностью скомпенсированы только при нулевой оценке присутствия погрешности по угловой скорости ΔΩ в рабочем диапазоне частот, что произойдет при равенстве нулю вектора ΔUф и в установившемся, и динамическом режимах. Тогда корректирующие сигналы на входы 2 устройства 25, блоков 27 и 29 станут нулевыми. Высокая точность скорректированных ДУС обеспечивает высокую точность вычисления вектора U даже при отключении коррекции инерциальных датчиков подачей на вход 3 устройства 25 нулевых компонент массива JU, поданного на вход 3 БИКВ.
Вектор наблюдаемой угловой ориентации после коррекции Uнk формируется блоком 34 вычитанием из вектора наблюдаемой угловой ориентации Uн {γн, ψн, ϑн} (вход 1) вектора оценки погрешности наблюдаемой угловой ориентации ΔUн {Δγн, Δψн, Δϑн} (вход 2). Если в данный момент времени вектор ΔUн не вычисляется, то он приравнивается нулю. Вектор Uн формируется дополнением вектора наблюдаемой вертикали Uнв {γн, ϑн} третьей компонентой - наблюдаемым углом рысканья ψн. Вектор Uнв вычисляется блоком 35 с использованием проекций вектора линейного ускорения после коррекции nuk [5], поданного на вход 4 БИКВ. Наблюдаемый угол рысканья ψн вычисляется блоком 36 по магнитному курсу ψм, поданному на вход 1, с учетом магнитного склонения и магнитной девиации [3, с.349-354]. Магнитный курс ψм вычисляется блоком 37 как проекция вектора измеренного магнитного поля ψuм, поданного на вход 2 БИКВ и на вход 1 блока 37, на горизонтальную плоскость с использованием вектора угловой ориентации U, поданного на вход 2 блока 37. Блоки 36 и 37 привязывают угол рысканья к достаточно стабильным земным ориентирам, к которым относится вектор магнитного поля Земли. Следовательно, совокупностью введенных блоков 26, 27, 33, 34, 36, 37 и устройства 25, а также связей между ними, решается поставленная задача - снижение погрешности вычисления вектора угловой ориентации.
При длительных эволюциях ЛА по высоте, направлению и крену вектор наблюдаемой угловой ориентации после коррекции Uнk накопит погрешности и будет отличаться от фактического, что приведет к неточному вычислению векторов ΔU и
ΔUф. Вектор ΔΩ будет также содержать погрешности, что приведет к ошибочной коррекции ДУС и к дополнительной погрешности вычисления вектора U. Для исключения ошибочной оценки вектора ΔΩ при длительных эволюциях ЛА коррекцию необходимо отключить. Оценкой длительной эволюции ЛА является возникновение низкочастотных составляющих в изменении вектора . Если амплитуда низкочастотной составляющей вектора превысит некоторый порог, зависящий от конкретных характеристик ЛА, то коррекция отключается блоком 38, если же заданный порог амплитуды низкочастотной составляющей вектора не превышен, то коррекция включается блоком 38. С этой целью блок 38 выделяет низкочастотную составляющую компоненты вектора , поданного на его вход, при этом может использоваться дискретный фильтр Калмана [10, с.40-52] или более простой фильтр, например цифровой фильтр первого порядка [11, с.425-426], сравнивает с заданным порогом и вырабатывает массив признаков включения коррекции угловой ориентации J {JX, JY, JZ}, компоненты которого принимают значения {1 0}. Массив J поступает на вход 2 блока 32, где компонента вектора ΔUф умножается на соответствующую компоненту массива J. При отсутствии превышения заданного порога компонента вектора ΔUф умножается на единицу, при превышении - на ноль. Ранее выполненная точная компенсация погрешностей ДУС не будет нарушена из-за ошибочной оценки вектора ΔΩ при длительных эволюциях ЛА, и высокая точность вычисления вектора U будет сохранена.
Дополнительные погрешности вычисления вектора угловой ориентации U могут быть обусловлены неточным определением вектора наблюдаемой угловой ориентации Uн из-за присутствия погрешности определения вектора nuk и погрешности магнитного курса ψм. Присутствие погрешности вычисления вектора U приведет к неточному преобразованию координат, погрешностям вычисления вектора скорости в связанной системе координат и к неточной подстройке инерциальных датчиков. Для минимизации перечисленных погрешностей необходимо компенсировать погрешности определения вектора Uн. С этой целью на входы 5 и 6 БИКВ подаются вектора dVсв и Vgk. Блоком 39 вычисляются: вектор скорости в связанной системе координат преобразованием вектора Vkk, поданного на вход 1, вектор погрешности вектора скорости в нормальной земной системе координат преобразованием вектора dVсв, поданного на вход 2, с использованием матрицы преобразования [9, с.41-43] и вектора U, поданного на вход 3. Затем по относительному положению вектора скорости в нормальной земной системе координат и этого же вектора, сложенного с вектором погрешности вектора скорости в нормальной земной системе координат, вычисляются погрешности угла пути и угла наклона траектории в соответствии с определениями этих углов [9, с.10] и приемами вычисления углов между вектором и плоскостью, изложенными в аналитической геометрии в пространстве [13, с.116]. По относительному положению вектора скорости в связанной системе координат и этого же вектора, сложенного с вектором погрешности вектора скорости в связанной системе координат, вычисляются погрешности траекторных углов крена, скольжения и атаки в соответствии с определениями этих углов [14, п.2.1.2] и приемами вычисления углов между векторами, изложенными в аналитической геометрии в пространстве [13, с.116]. Погрешность траекторного угла крена определяет погрешность фактического угла крена, сумма погрешностей траекторного угла скольжения и угла пути определяет погрешность угла рысканья, сумма погрешностей траекторного угла атаки и угла наклона траектории определяет погрешность угла тангажа в соответствии с определениями этих углов [9, с.9]. Вычисленные погрешности углов крена, рысканья и тангажа являются компонентами вектора оценки присутствия погрешности угловой ориентации dUV {dγV, dψV, dϑV} на выходе блока 39. Блок 40 выделяет низкочастотную составляющую соответствующей компоненты вектора dUV, поданного на вход 1, при достоверности присутствия погрешности по ускорению, определяемой массивом JU, поданным на вход 2, при этом может использоваться дискретный фильтр Калмана [10, с.40-52] или более простой фильтр, например цифровой фильтр первого порядка [11, с.425-426]. С выхода блока 40 вектор оценки погрешности наблюдаемой угловой ориентации ΔUн подается на вход 2 блока 34 и выполняет коррекцию вектора Uн. Введение в БИКВ блоков 39 и 40 обеспечивает снижение погрешности вычисления вектора угловой ориентации за счет вычисления и компенсации возможной погрешности вектора наблюдаемой угловой ориентации.
Дополнительные погрешности вычисления вектора U могут быть обусловлены неполной компенсацией погрешности вектора Uн в динамическом режиме из-за присутствия погрешности определения магнитного курса ψм и неточным пересчетом магнитного курса в наблюдаемый угол рысканья ψн. Блок 41 на магнитном курсе ψм, поданном на вход 1, приравнивает оценку погрешности наблюдаемого угла рысканья Δψн, поданного на вход 2, погрешности магнитного курса Δψм при достоверности присутствия погрешности по ускорению, определяемой массивом JU, поданным на вход 3, и записывает результат в память. При недостоверности присутствия погрешности по ускорению, определяемой массивом Δψм, оценка погрешности магнитного курса Δψм берется из памяти блока 41, ранее записанной для данного магнитного курса ψм. Оценка погрешности магнитного курса Δψм подается на вход 2 блока 36, где вычитается из магнитного курса ψм. Введение в БИКВ блока 41 обеспечивает снижение погрешности вычисления вектора угловой ориентации в динамическом режиме за счет компенсации погрешности вычисления магнитного курса и более точного вычисления наблюдаемого угла рысканья.
В предлагаемом способе коррекции инерциальных датчиков используют оценку присутствия погрешности, которая вырабатывается в устройстве вычисления скорости и координат или БИКВ. Многоконтурная, специальным образом организованная система обработки информации в устройстве вычисления скорости и координат или в БИКВ, описание которых приведено выше, оценивает присутствие погрешности измерений по погрешностям вычисляемых характеристик движения. Аддитивную составляющую полной погрешности вычисляют изодромным преобразованием оценки присутствия погрешности измерений. Изодромное преобразование решает несколько задач: накапливает выходную информацию до тех пор, пока оценка присутствия погрешности измерения отличается от нуля, запоминает погрешность измерения, подавляет высокочастотную составляющую шума с нулевым математическим ожиданием, форсирует переходный процесс на начальном этапе, обеспечивает необходимое качество в переходном и установившемся режимах автоматической коррекции инерциального датчика [15, с.83, 111]. Полученную таким образом аддитивную составляющую полной погрешности измерений вычитают из результата измерения. Выполненная таким способом коррекция инерциальных датчиков снижает погрешности определения параметров движения ЛА.
В предлагаемом способе коррекции инерциальных датчиков отклонение крутизны выходной характеристики, являющееся источником мультипликативной погрешности, выявляют соответствующей обработкой оценки присутствия погрешности инерциального датчика. Суть обработки заключается в том, что при крутизне характеристики, большей номинала, и при положительном знаке результата измерения оценка присутствия погрешности измерения будет положительной, а при отрицательном знаке результата измерения - отрицательной. Следовательно, в обоих случаях произведение оценки присутствия погрешности измерения на знак результата измерения будет положительным. В то же время при крутизне характеристики, меньшей номинала, и при положительном знаке результата измерения оценка присутствия погрешности измерения будет отрицательной, а при отрицательном знаке результата измерения - положительной. Следовательно, в обоих случаях произведение оценки присутствия погрешности измерения на знак результата измерения будет отрицательным. При отсутствии погрешности крутизны характеристики, но присутствии других составляющих погрешности, знак произведения будет изменяться. Умножением оценки присутствия погрешности измерения на знак результата измерения вычисляется оценка погрешности крутизны характеристики инерциального датчика. Однако при вычислениях необходимо согласовать фазовые сдвиги оценки присутствия погрешности измерения и результата измерения, которые определяются передаточными функциями соответствующих каналов в устройстве вычисления скорости и координат и в БИКВ. Таким образом, для выполнения коррекции инерциальных датчиков вычисляют фазовый сдвиг оценки присутствия погрешности измерений относительно результата измерений, определяют знак сдвинутого по фазе результата измерений, вычисляют погрешности крутизны характеристик инерциальных датчиков изодромным преобразованием произведения оценки присутствия погрешности измерений на знак сдвинутого по фазе результата измерений, вычисляют мультипликативную составляющую полной погрешности измерений умножением погрешности крутизны характеристик инерциальных датчиков на результат измерений, мультипликативную составляющую полной погрешности измерений вычитают из результата измерений. Выполненная таким способом коррекция инерциальных датчиков дополнительно снижает погрешности определения параметров движения ЛА.
Устройство коррекции инерциальных датчиков (фиг.4), в соответствии со способом коррекции инерциальных датчиков, вычисляет вектор измерений инерциальных датчиков после коррекции Quk {QXuk, QYuk, QZuk}, поданный на его выход. На вход 1 устройства коррекции инерциальных датчиков подается вектор измерений инерциальных датчиков Qu {QXu, QYu, QZu}, на вход 2 подается вектор оценки присутствия погрешности измерений в связанной системе координат dQcв {dQXсв, dQYсв,
dQZcв}. Блок 42 вычитает из вектора измерений инерциальных датчиков Qu, поданного на вход 1, вектор аддитивной погрешности измерений dQk0 {dQXk0, dQYk0, dQZk0}, поданный на вход 2, обеспечивая вычисление вектора Quk. Блок 43 вычисляет вектор аддитивной погрешности измерений dQk0 изодромным преобразованием вектора dQсв, поданного на вход 1. При изодромном преобразовании каждая компонента вектора аддитивной погрешности измерений dQk0 вычисляется суммированием соответствующей компоненты вектора dQсв и интеграла от этой компоненты с коэффициентами, определяемыми из условий скорости коррекции, интенсивности подавления шумов, необходимого качества регулирования в переходном и установившемся режимах работы автоматической коррекции инерциальный датчиков [15, с.83, 111]. За счет вычитания вектора аддитивной погрешности измерений из вектора измерений инерциальных датчиков обеспечивается снижение погрешности определения параметров движения ЛА.
Устройство коррекции инерциальных датчиков, в соответствии со способом коррекции инерциальных датчиков, компенсирует мультипликативную составляющую полной погрешности измерений, которая определяется погрешностью крутизны характеристик инерциальных датчиков. Массив оценки погрешности крутизны характеристик инерциальных датчиков dk {dkX, dkY, dkZ} вычисляется блоком 44 изодромным преобразованием произведения соответствующей компоненты вектора оценки присутствия погрешности измерений в связанной системе координат dQсв, поданного на вход 1, и знака соответствующей компоненты, согласованного по фазе вектора измерений инерциальных датчиков после коррекции Qukф {dQXukф, dQYukф, dQZukф}, поданного на вход 2. Вектор Qukф вычисляется блоком 45 умножением соответствующей компоненты вектора измерений инерциального датчика после коррекции Quk, поданного на вход 1, на передаточную функцию канала оценки присутствия погрешности измерений в устройстве вычисления скорости и координат или в БИКВ. Вычисления производятся, если оценка присутствия погрешности измерений выполнена, о чем свидетельствует массив JU, поданный на вход 3 устройства коррекции инерциальных датчиков и на вход 2 блока 45. В противном случае вектор Оukф обнуляется. Вектор мультипликативной составляющей полной погрешности измерений dQkk {dQXkk, dQYkk, dQZkk} вычисляется блоком 46 умножением компоненты массива dk, поданного на вход 1, на соответствующую компоненту вектора Quk, поданного на вход 2. Вектор мультипликативной составляющей полной погрешности измерений подается на вход 3 блока 42, где вычитается из вектора измерений инерциальных датчиков Qu. За счет вычитания вектора мультипликативной составляющей полной погрешности измерений из вектора измерений инерциальных датчиков обеспечивается дополнительное снижение погрешности определения параметров движения ЛА.
Устройство коррекции инерциальных датчиков выполняет компенсацию погрешности при включении специального режима, который осуществляет блок режима коррекции 47. Блок 47 вырабатывает массив признаков включения режима коррекции JQ {JQX0, JQY0, JQZ0, JQXk, JQYk, JQZk} в зависимости от условий полета ЛА. С выхода блока 47 массив JQ подается на вход 2 блока 43 и вход 3 блока 44. При единичном значении компоненты массива JQ коррекция соответствующей компоненты аддитивной или мультипликативной составляющей погрешности инерциального датчика будет выполняться. При нулевом значении коррекция будет отсутствовать. Включение коррекции блоком 47 производится на режимах полета, при которых погрешности инерциальных датчиков проявляются наиболее полно. Повышается эффективность работы устройства коррекции инерциальных датчиков, заключающейся в меньшей величине остаточной погрешности и меньшем времени коррекции, что обеспечивает дополнительное снижение погрешности определения параметров движения ЛА.
Таким образом, заявляемый навигационный комплекс, устройство вычисления скорости и координат, БИКВ, способ коррекции инерциальных датчиков и устройство для его осуществления содержат отличительные признаки от ближайших аналогов, совокупность которых обеспечивает достижение заявленного технического результата.
Изобретения группы настолько связаны между собой, что образуют единый изобретательский замысел. Навигационный комплекс определяет вектор скорости, радиус-вектор в нормальной земной системе координат и вектор угловой ориентации, при этом вектор угловой ориентации вычисляет БИКВ, а вектор скорости и радиус-вектор вычисляет устройство вычисления скорости и координат. Вектор скорости и радиус-вектор вычисляются в нормальной земной системе координат, а измерения ускорений осуществляются в связанной системе координат. Для преобразования координат в устройстве вычисления скорости и координат необходимы углы ориентации, которые вычисляет БИКВ. В то же время для коррекции БИКВ необходимо знание векторов ускорения, скорости и оценки погрешности по скорости, которые вычисляет устройство вычисления скорости и координат. Отсутствие в навигационном комплексе устройства вычисления скорости и координат или БИКВ делает его неработоспособным. В то же время БИКВ может использоваться самостоятельно как устройство вычисления углов ориентации с коррекцией только от трехканального блока ДЛУ. Погрешность вычисления вектора угловой ориентации в этом случае будет выше, но БИКВ будет работать автономно. Ее по своему функциональному назначению можно использовать в составе других систем, например, для обеспечения угловой ориентации БПЛА относительно Земли или для обеспечения угловой ориентации видеоаппаратуры на борту БПЛА. Устройство вычисления скорости и координат можно использовать также автономно, а необходимые для его работы углы ориентации измерять каким-либо другим устройством, например гировертикалью, или устройство вычисления скорости и координат может работать по своему функциональному назначению в других навигационных системах, например в платформенной навигационной системе, где углы ориентации стабилизируются платформой.
Погрешности вычисления вектора скорости, радиус-вектора в нормальной земной системе координат и вектора угловой ориентации ЛА в значительной степени определяются погрешностями инерциальных датчиков. Для компенсации погрешностей инерциальных датчиков используется устройство коррекции инерциальных датчиков, построенное в соответствии со способом коррекции инерциальных датчиков. Введение устройства коррекции инерциальных датчиков в устройство вычисления скорости и координат и в БИКВ снижает погрешности вычисления вектора скорости, радиус-вектора в нормальной земной системе координат и вектора угловой ориентации ЛА и в этой связи является необходимой частью указанных устройств. В то же время способ коррекции инерциальных датчиков может быть применен для повышения точности других аналогичных датчиках, а устройство коррекции инерциальных датчиков может быть применено в других системах, в которых может быть выполнена оценка присутствия погрешности датчиков, например коррекция инерциальных датчиков надводных и подводных судов, коррекция датчиков скорости и счисления пройденного пути наземных транспортных средств, коррекция датчиков аппаратуры контроля прохождения стволов бурильными установками в нефтегазовой промышленности и др.
Таким образом, во-первых, части группы изобретений непосредственно участвуют в достижении требуемого технического результата - снижение погрешности определения вектора скорости, радиус-вектора в нормальной земной системе координат и вектора угловой ориентации ЛА при использовании датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации, во-вторых, они могут использоваться по своему функциональному назначению отдельно или в составе других объектов.
Источники информации
1. Патент RU 2023983, КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ, опубл. 30.11.1994 г.
2. Патент RU 2071034, НАВИГАЦИОННЫЙ КОМПЛЕКС, опубл. 27.12.1996 г.
3. Самолетные навигационные системы. Пер. с англ. / Под ред. В.Ю.Полякова. - М.: Воениздат, 1973. - 464 с.
4. Дмитраченко Л.А., Гора В.П., Савинов Г.Ф. Бесплатформенные инерциальные навигационные системы: Учебное пособие. - М.: МАИ, 1984. - 64 с.
5. Патент RU 2249791, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, опубл. 10.04.2005 г.
6. Земельман М.А. Автоматическая коррекция погрешностей измерительных устройств. - М.: Издательство стандартов, 1972. - 200 с.
7. Патент RU 2083954, ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, опубл. 10.07.1997.
8. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
9. ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере: Термины, определения и обозначения. - М.: Изд. стандартов, 1981. - 52 с.
10. Обработка информации в навигационных комплексах. / О.А.Бабич. - М.: Машиностроение, 1991. - 512 с.
11. Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство. Пер. с нем. - М.: Мир, 1982. - 512 с.
12. Бурков В.Н. Адаптивные прогнозирующие системы управления полетом. - М.: Наука. Гл. ред. физ.-мат. лит., 1987. - 232 с.
13. Выгодский М.Я. Справочник по высшей математике. - М.: Наука, 1977. - 872 с.
14. Березин Д.Р. Синтез алгоритмов функционирования бортовой навигационной системы для малоразмерных беспилотных летательных аппаратов. Диссертация на соискание ученой степени кандидата технических наук. - Рыбинск: РГАТА, 2002. - 185.
15. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 768 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ ВЫСОКОЙ ТОЧНОСТИ | 2015 |
|
RU2615032C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2615033C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
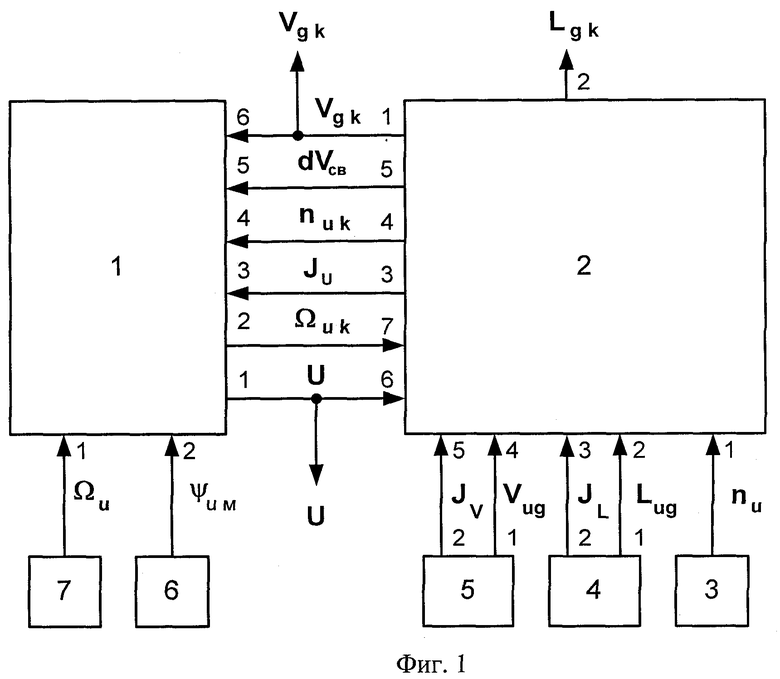
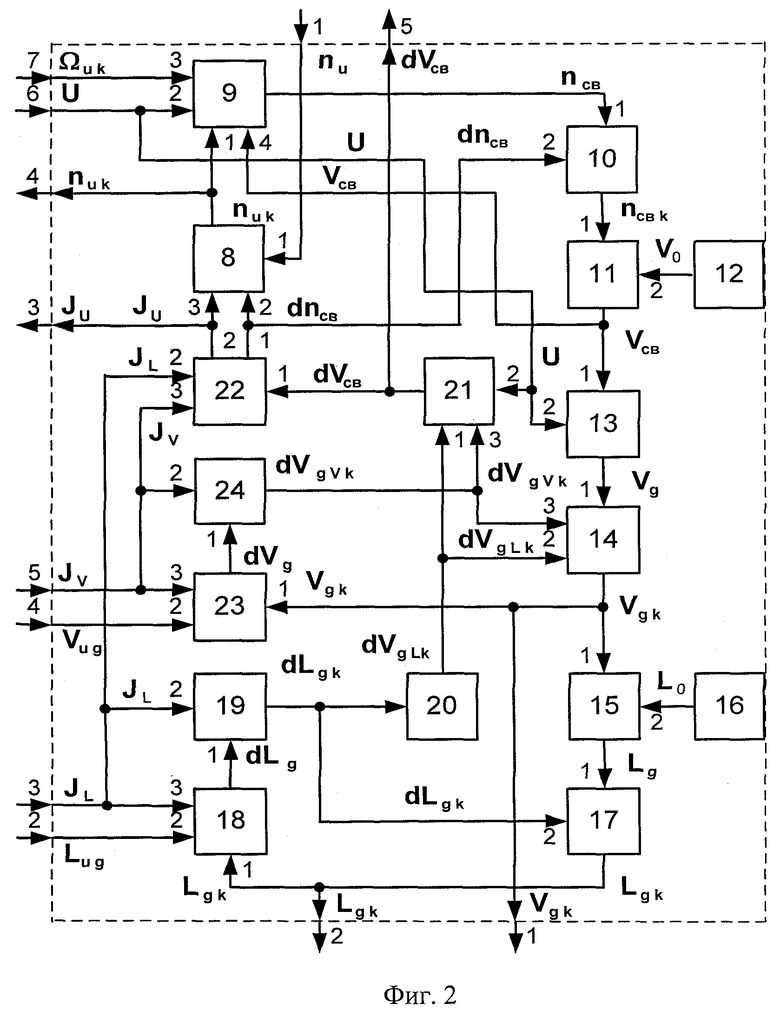
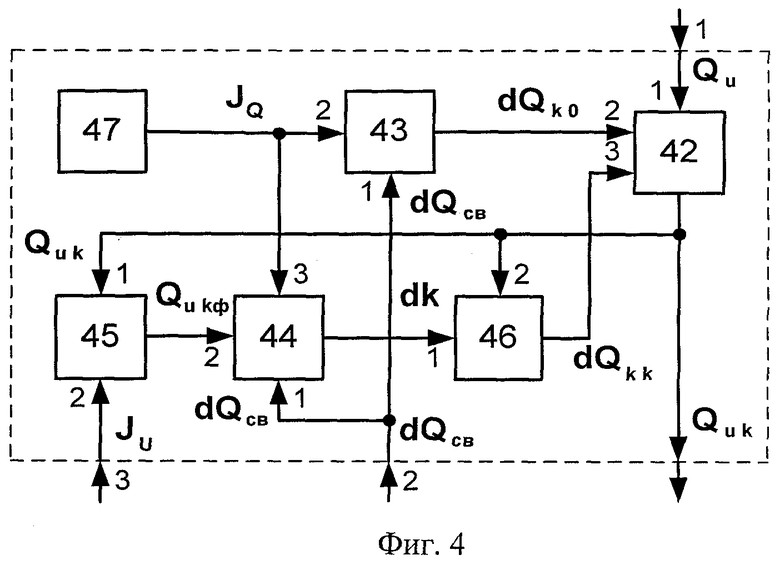
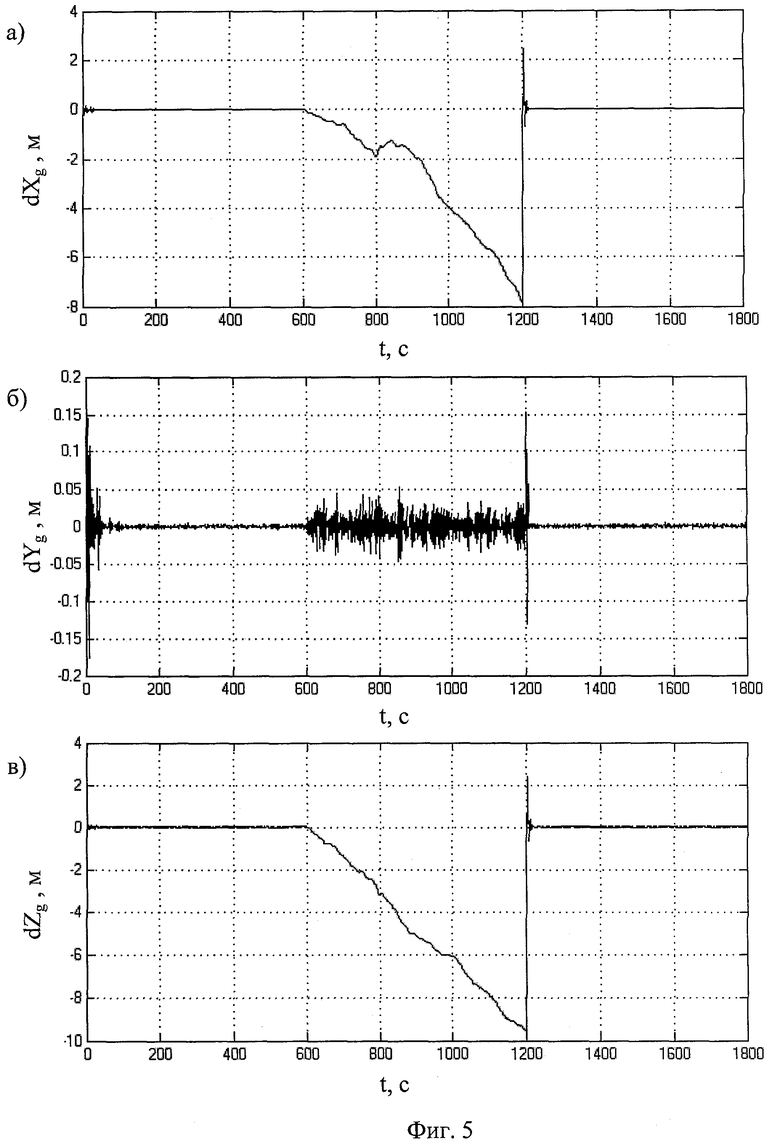
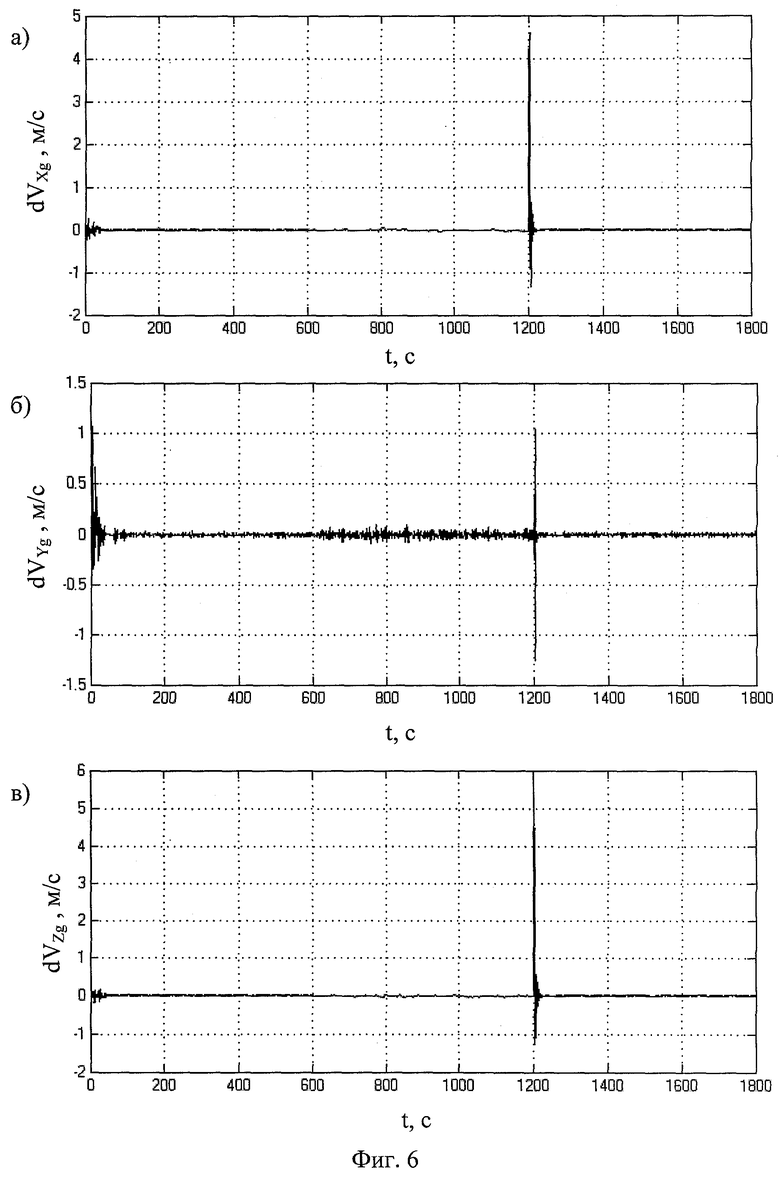
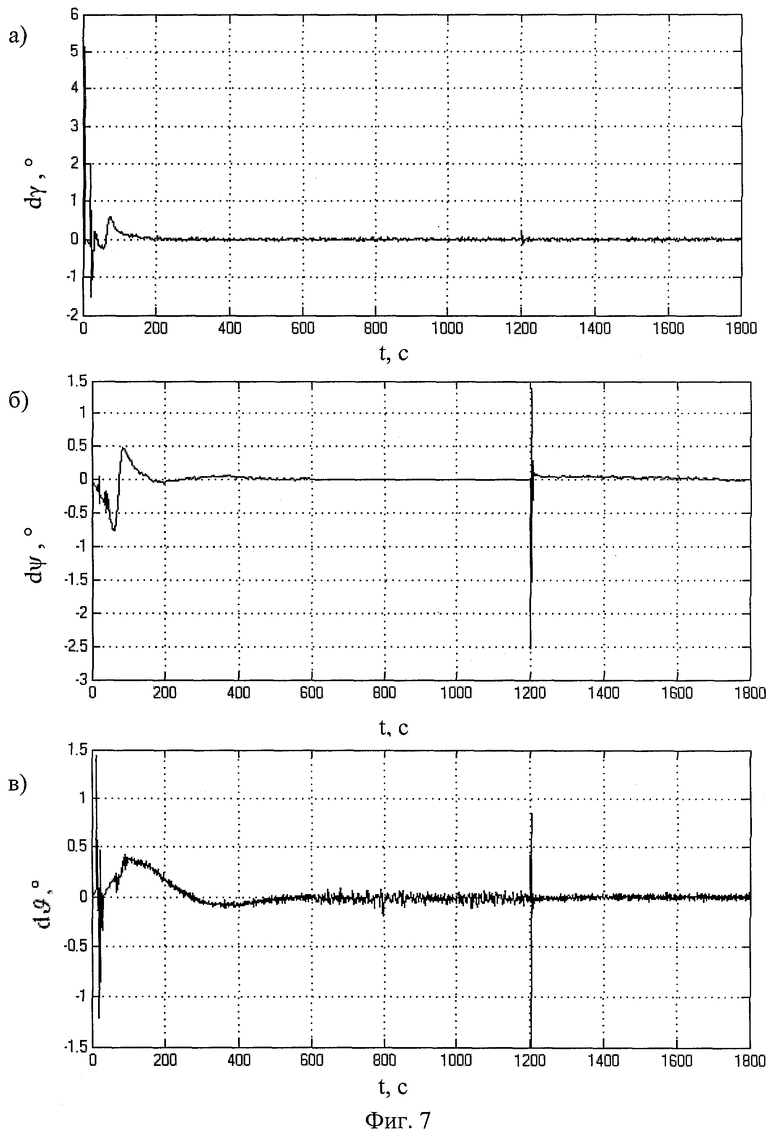
Группа изобретений относится к области приборостроения и может найти применение для бесплатформенных инерциальных навигационных систем (БИНС) летательных аппаратов (ЛА) и, прежде всего, малоразмерных беспилотных летательных аппаратов (БПЛА). Технический результат - повышение точности. Для достижения данного результата навигационный комплекс содержит бесплатформенную инерциальную курсовертикаль (БИКВ), устройство вычисления скорости и координат, трехканальный блок датчиков линейных ускорений (ДЛУ), блок измерения координат, блок измерения скорости, трехстепенной магнитный датчик направления, трехканальный блок датчиков угловых скоростей (ДУС). Определение вектора угловой ориентации, вектора скорости и радиус-вектора осуществляют на основе измерения вектора угловых скоростей и вектора линейных ускорений многоконтурными автоматическими регуляторами. 5 н. и 7 з.п. ф-лы, 7 ил.
1. Навигационный комплекс, содержащий бортовой вычислитель, трехканальный блок датчиков линейных ускорений, блок измерения координат, блок измерения скорости, трехстепенной магнитный датчик направления, трехканальный блок датчиков угловых скоростей, отличающийся тем, что бортовой вычислитель выполнен в виде бесплатформенной инерциальной курсовертикали и устройства вычисления скорости и координат, при этом первый вход устройства вычисления скорости и координат соединен с выходом трехканального блока датчиков линейных ускорений, второй и третий входы устройства вычисления скорости и координат соединены с первым и вторым выходами блока измерения координат, четвертый и пятый входы устройства вычисления скорости и координат соединены с первым и вторым выходами блока измерения скорости, шестой и седьмой входы устройства вычисления скорости и координат соединены с первым и вторым выходами бесплатформенной инерциальной курсовертикали, первый и второй входы бесплатформенной инерциальной курсовертикали соединены с выходом трехканального блока датчиков угловых скоростей и с выходом трехстепенного магнитного датчика направления, а третий, четвертый, пятый и шестой входы бесплатформенной инерциальной курсовертикали соединены с третьим, четвертым, пятым и первым выходами устройства вычисления скорости и координат соответственно, первый и второй выходы устройства вычисления скорости и координат являются выходами вектора скорости и радиус-вектора в нормальной земной системе координат после коррекции, а первый выход бесплатформенной инерциальной курсовертикали является выходом вектора угловой ориентации.
2. Устройство вычисления скорости и координат, содержащее блок введения поправок Кориолиса и ускорения силы тяжести Земли, блок коррекции ускорения, блок вычисления скорости, блок задания начальной скорости, блок коррекции скорости, блок вычисления координат, блок задания начальных координат, блок вычисления погрешности по координатам, блок фильтрации погрешности по координатам, блок оценки погрешности скорости по координатам, при этом первый вход блока коррекции ускорения соединен с выходом блока введения поправок Кориолиса и ускорения силы тяжести Земли, первый и второй входы блока вычисления скорости соединены с выходом блока коррекции ускорения и с выходом блока задания начальной скорости, первый и второй входы блока вычисления координат соединены с выходом блока коррекции скорости и с выходом блока задания начальных координат, первый вход блока фильтрации погрешности по координатам соединен с выходом блока вычисления погрешности по координатам, вход блока оценки погрешности скорости по координатам соединен с выходом блока фильтрации погрешности по координатам, выход блока оценки погрешности скорости по координатам соединен со вторым входом блока коррекции скорости, отличающееся тем, что в него введены устройство коррекции инерциальных датчиков, блок пересчета скорости из связанной системы координат в нормальную земную, блок коррекции координат, блок оценки присутствия погрешности по скорости в связанной системе координат, блок оценки присутствия погрешности по ускорению, при этом первый, второй и третий входы устройства коррекции инерциальных датчиков соединены с первым входом устройства вычисления скорости и координат и с первым и вторым выходами блока оценки присутствия погрешности по ускорению соответственно, выход устройства коррекции инерциальных датчиков соединен с первым входом блока введения поправок Кориолиса и ускорения силы тяжести Земли и с четвертым выходом устройства вычисления скорости и координат, второй, третий и четвертый входы блока введения поправок Кориолиса и ускорения силы тяжести Земли соединены с шестым и седьмым входами устройства вычисления скорости и координат и с выходом блока вычисления скорости соответственно, второй вход блока коррекции ускорения соединен с первым выходом блока оценки присутствия погрешности по ускорению, первый и второй входы блока пересчета скорости из связанной системы координат в нормальную земную соединены с выходом блока вычисления скорости и с шестым входом устройства вычисления скорости и координат, первый вход блока коррекции скорости соединен с выходом блока пересчета скорости из связанной системы координат в нормальную земную, первый и второй входы блока коррекции координат соединены с выходом блока вычисления координат и с выходом блока фильтрации погрешности по координатам, первый, второй и третий входы блока вычисления погрешности по координатам соединены с выходом блока коррекции координат и со вторым и третьим входами устройства вычисления скорости и координат соответственно, второй вход блока фильтрации погрешности по координатам соединен с третьим входом устройства вычисления скорости и координат, первый и второй входы блока оценки присутствия погрешности по скорости в связанной системе координат соединены с выходом блока оценки погрешности скорости по координатам и с шестым входом устройства вычисления скорости и координат, первый и второй входы блока оценки присутствия погрешности по ускорению соединены с выходом блока оценки присутствия погрешности по скорости в связанной системе координат и с третьим входом устройства вычисления скорости и координат, первый, второй, третий и пятый выходы устройства вычисления скорости и координат соединены с выходом блока коррекции скорости, с выходом блока коррекции координат, со вторым выходом блока оценки присутствия погрешности по ускорению и с выходом блока оценки присутствия погрешности по скорости в связанной системе координат соответственно.
3. Устройство вычисления скорости и координат по п.2, отличающееся тем, что в него дополнительно введены блок вычисления погрешности по скорости и блок фильтрации погрешности по скорости, при этом первый, второй и третий входы блока вычисления погрешности по скорости соединены с выходом блока коррекции скорости, с четвертым и пятым входами устройства вычисления скорости и координат соответственно, первый и второй входы блока фильтрации погрешности по скорости соединены с выходом блока вычисления погрешности по скорости и с пятым входом устройства вычисления скорости и координат, третий вход блока оценки присутствия погрешности по ускорению соединен с пятым входом устройства вычисления скорости и координат, выход блока фильтрации погрешности по скорости соединен с третьим входом блока оценки присутствия погрешности по скорости в связанной системе координат и с третьим входом блока коррекции скорости.
4. Бесплатформенная инерциальная курсовертикаль, содержащая формирователь производных от углов ориентации, блок коррекции, блок интеграторов, блок вычисления погрешности угловой ориентации, фильтр, блок вычисления наблюдаемой вертикали, при этом второй вход формирователя производных от углов ориентации соединен с выходом блока интеграторов, входы блока коррекции соединены с выходом формирователя производных от углов ориентации и выходом фильтра, вход блока интеграторов соединен с выходом блока коррекции, первый вход блока вычисления погрешности угловой ориентации соединен с выходом блока интеграторов, первый вход фильтра соединен с выходом блока вычисления погрешности угловой ориентации, отличающаяся тем, что в нее введены устройство коррекции инерциальных датчиков, блок введения поправки на угловую скорость вращения Земли, блок коррекции угловых скоростей, блок оценки присутствия погрешности по угловой скорости, блок коррекции наблюдаемых углов ориентации, блок вычисления наблюдаемого угла рысканья, блок вычисления магнитного курса, при этом первый, второй и третий входы устройства коррекции инерциальных датчиков соединены с первым входом бесплатформенной инерциальной курсовертикали, выходом блока оценки присутствия погрешности по угловой скорости и третьим входом бесплатформенной инерциальной курсовертикали соответственно, первый и второй входы блока введения поправки на угловую скорость вращения Земли соединены с выходом устройства коррекции инерциальных датчиков и с выходом блока интеграторов, входы блока коррекции угловых скоростей соединены с выходом блока введения поправки на угловую скорость вращения Земли и с выходом блока оценки присутствия погрешности по угловой скорости, первый вход формирователя производных от углов ориентации соединен с выходом блока коррекции угловых скоростей, первый и второй входы блока оценки присутствия погрешности по угловой скорости соединены с выходом фильтра и с выходом блока интеграторов, второй вход блока вычисления погрешности угловой ориентации соединен с выходом блока коррекции наблюдаемых углов ориентации, первый вход блока коррекции наблюдаемых углов ориентации соединен с выходом блока вычисления наблюдаемой вертикали и выходом блока вычисления наблюдаемого угла рысканья, вход блока вычисления наблюдаемой вертикали соединен с четвертым входом бесплатформенной инерциальной курсовертикали, первый вход блока вычисления наблюдаемого угла рысканья соединен с выходом блока вычисления магнитного курса, первый и второй входы которого соединены со вторым входом бесплатформенной инерциальной курсовертикали и с выходом блока интеграторов, первый и второй выходы бесплатформенной инерциальной курсовертикали соединены с выходом блока интеграторов и с выходом устройства коррекции инерциальных датчиков соответственно.
5. Бесплатформенная инерциальная курсовертикаль по п.4, отличающаяся тем, что в нее дополнительно введен блок выработки признаков включения коррекции угловой ориентации, вход которого соединен с выходом формирователя производных от углов ориентации, а выход соединен со вторым входом фильтра.
6. Бесплатформенная инерциальная курсовертикаль по п.5, отличающаяся тем, что в нее дополнительно введены блок оценки присутствия погрешности угловой ориентации и блок вычисления погрешности наблюдаемых углов ориентации, при этом первый, второй и третий входы блока оценки присутствия погрешности угловой ориентации соединены с шестым и пятым входами бесплатформенной инерциальной курсовертикали и с выходом блока интеграторов соответственно, первый и второй входы блока вычисления погрешности наблюдаемых углов ориентации соединены с выходом блока оценки присутствия погрешности угловой ориентации и с третьим входом бесплатформенной инерциальной курсовертикали соответственно, выход блока вычисления погрешности наблюдаемых углов ориентации соединен со вторым входом блока коррекции наблюдаемых углов ориентации.
7. Бесплатформенная инерциальная курсовертикаль по п.6, отличающаяся тем, что в нее дополнительно введен блок коррекции магнитного курса, первый, второй и третий входы которого соединены с выходом блока вычисления магнитного курса, выходом блока вычисления погрешности наблюдаемых углов ориентации и третьим входом бесплатформенной инерциальной курсовертикали соответственно, выход блока коррекции магнитного курса соединен со вторым входом блока вычисления наблюдаемого угла рысканья.
8. Способ коррекции инерциальных датчиков, заключающийся в том, что компенсируют погрешности измерений, отличающийся тем, что оценивают присутствие погрешности измерений, вычисляют аддитивную составляющую полной погрешности измерений, при этом оценку присутствия погрешности измерений производят по погрешностям вычисляемых характеристик движения, а аддитивную составляющую полной погрешности измерений вычисляют изодромным преобразованием оценки присутствия погрешности измерений.
9. Способ коррекции инерциальных датчиков по п.8, отличающийся тем, что вычисляют погрешности крутизны характеристик инерциальных датчиков, определяют знак сдвинутого по фазе результата измерений, вычисляют мультипликативную составляющую полной погрешности измерений, при этом фазовый сдвиг результата измерений определяют по фазовому смещению оценки присутствия погрешности измерений относительно результата измерений, погрешности крутизны характеристик инерциальных датчиков вычисляют изодромным преобразованием произведения оценки присутствия погрешности измерений на знак сдвинутого по фазе результата измерений, а мультипликативную составляющую полной погрешности измерений вычисляют умножением погрешности крутизны характеристик инерциальных датчиков на результат измерений.
10. Устройство коррекции инерциальных датчиков, содержащее блок компенсации погрешности измерений, отличающееся тем, что в него введен блок вычисления аддитивной погрешности измерений, при этом первый и второй входы блока компенсации погрешности измерений соединены с первым входом устройства коррекции инерциальных датчиков и с выходом блока вычисления аддитивной погрешности измерений, первый вход которого соединен со вторым входом устройства коррекции инерциальных датчиков, выход блока компенсации погрешности измерений соединен с выходом устройства коррекции инерциальных датчиков.
11. Устройство коррекции инерциальных датчиков по п.10, отличающееся тем, что в него дополнительно введены блок вычисления погрешности крутизны характеристик инерциальных датчиков, блок фазовых согласований, блок вычисления мультипликативной погрешности измерений, при этом первый и второй входы блока вычисления погрешности крутизны характеристик инерциальных датчиков соединены со вторым входом устройства коррекции инерциальных датчиков и с выходом блока фазовых согласований, первый и второй входы которого соединены с выходом блока компенсации погрешности измерений и третьим входом устройства коррекции инерциальных датчиков, первый и второй входы блока вычисления мультипликативной погрешности измерений соединены с выходом блока вычисления погрешности крутизны характеристик инерциальных датчиков и выходом блока компенсации погрешности измерений, выход блока вычисления мультипликативной погрешности измерений соединен с третьим входом блока компенсации погрешности измерений.
12. Устройство коррекции инерциальных датчиков по п.11, отличающееся тем, что в него дополнительно введен блок режима коррекции, выход которого соединен со вторым входом блока вычисления аддитивной погрешности измерений и третьим входом блока вычисления погрешности крутизны характеристик инерциальных датчиков.
| RU 2071034 C1, 27.12.1996 | |||
| Самолетные навигационные системы | |||
| Перевод с английского | |||
| / Под ред | |||
| В.Ю.ПОЛЯКОВА | |||
| - М.: Воениздат, 1973, с.281-284 | |||
| ДМИТРАЧЕНКО Л.А., ГОРА В.П., САВИНОВ Г.Ф | |||
| Бесплатформенные инерциальные навигационные системы | |||
| Учебное пособие | |||
| - М.: МАИ, 1984, с.29-35 | |||
| ЗЕМЕЛЬМАН М.А | |||
| Автоматическая коррекция погрешностей измерительных |

