Изобретение относится к бесплатформенным инерциальным курсовертикалям (БИКВ) и может найти применение в беспилотных летательных аппаратах (БЛА) различных классов для определения угловой ориентации в нормальной земной системе координат при выполнении сложных маневров, в том числе и фигур высшего пилотажа.
Аналогом заявляемого устройства является «Бесплатформенная инерциальная курсовертикаль на чувствительных элементах средней точности» [1], содержащая блок чувствительных элементов из трех акселерометров и трех датчиков угловых скоростей по трем ортогональным осям, магнитный компас, две вычислительные платформы, мастер-фильтр, причем каждая из вычислительных платформ содержит блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, блок формирования сигналов демпфирования, вторая вычислительная платформа дополнительно содержит адаптивный фильтр Калмана, в состав мастер-фильтра входит фильтр Калмана, блок комплексирования курса и два суммирующих устройства.
Известное устройство избыточно по составу и требует значительного объема вычислительных ресурсов. При выполнении летательным аппаратом фигур высшего пилотажа с вращением в трех взаимно перпендикулярных плоскостях фактические погрешности известного устройства могут превышать представленные в графическом материале [1, фиг. 6], что не оправдывает его существенное усложнение. Не предусмотрена начальная выставка курсовертикали, датчиков угловых скоростей и магнитного компаса, что может привести к значительным погрешностям на начальном этапе полета.
Наиболее близким к заявляемому устройству по технической сущности является бесплатформенная инерциальная курсовертикаль (БИКВ), представленная в группе изобретений «Навигационный комплекс, устройство вычисления скорости и координат, бесплатформенная инерциальная курсовертикаль, способ коррекции инерциальных датчиков и устройство для его осуществления» [2], содержащая трехканальный блок датчиков линейных ускорений, трехстепенной магнитный датчик направления, трехканальный блок датчиков угловых скоростей, формирователь производных от углов ориентации, блок коррекции, блок интеграторов, блок вычисления погрешности угловой ориентации, фильтр, блок вычисления наблюдаемой вертикали, устройство коррекции инерциальных датчиков, блок введения поправки на угловую скорость вращения Земли, блок коррекции угловых скоростей, блок оценки присутствия погрешности по угловой скорости, блок коррекции наблюдаемых углов ориентации, блок вычисления наблюдаемого угла рысканья, блок вычисления магнитного курса, блок выработки признаков включения коррекции угловой ориентации, блок оценки присутствия погрешности угловой ориентации, блок вычисления погрешности наблюдаемых углов ориентации, блок коррекции магнитного курса, блок режима коррекции.
К недостаткам известного устройства следует отнести необходимость в использовании внешних корректирующих устройств (спутниковой радионавигационной системы и/или системы радиолокационных измерений), невозможность точной начальной выставки курсовертикали, трехканального блока датчиков угловых скоростей и магнитного датчика направления, ограничение диапазона измерения угла тангажа из-за наличия особых точек, например, при угле тангажа, равном ±π/2.
Общими признаками заявляемой БИКВ и прототипа [2] являются трехканальный блок датчиков линейных ускорений, магнитный датчик направления (трехстепенной или иной конфигурации с низкими погрешностями определения магнитного курса), трехканальный блок датчиков угловых скоростей, блок вычисления погрешности угловой ориентации, блок вычисления наблюдаемой вертикали, блок введения поправки на угловую скорость вращения Земли, блок коррекции угловых скоростей, блок оценки присутствия погрешности по угловой скорости, блок вычисления наблюдаемого угла рысканья, блок выработки признаков включения коррекции угловой ориентации, блок режима коррекции.
Решаемой технической задачей предлагаемого изобретения является обеспечение начальной выставки курсовертикали, датчиков угловых скоростей и угла рысканья без использования внешней информации; сохранение работоспособности курсовертикали и высокой точности определения ориентации БЛА в параметрах Родрига-Гамильтона и углах Эйлера-Крылова при выполнении летательным аппаратом фигур высшего пилотажа с вращением в трех взаимно перпендикулярных плоскостях.
Техническим результатом является построение всережимной бесплатформенной инерциальной курсовертикали на чувствительных элементах высокой точности (погрешности датчиков угловых скоростей не более 0,6°/час; погрешности датчиков линейных ускорений не более 0,006 м/с2) без использования внешней информации.
Поставленная задача решается за счет того, что в БИКВ дополнительно введены блок вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, блок вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, блок вычисления начального угла рысканья, блок вычисления углов Эйлера-Крылова, блок начальной выставки датчиков угловых скоростей, блок задания широты места подготовки к старту, причем выход трехканального блока датчиков угловых скоростей подключен к первым входам блока вычисления начального угла рысканья, блока начальной выставки датчиков угловых скоростей и блока введения поправки на угловую скорость вращения Земли, выход магнитного датчика направления подключен ко второму входу блока вычисления наблюдаемого угла рысканья, выход трехканального блока датчиков линейных ускорений подключен к входу блока вычисления наблюдаемой вертикали, выход которого подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации и ко вторым входам блока вычисления начального угла рысканья, блока выработки признаков включения коррекции угловой ориентации и блока вычисления погрешности угловой ориентации, выход блока вычисления начального угла рысканья подключен к первому входу блока вычисления наблюдаемого угла рысканья, выход которого подключен к третьим входам блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, блока выработки признаков включения коррекции угловой ориентации и блока вычисления погрешности угловой ориентации, выход блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, выход которого подключен к входу блока вычисления углов Эйлера-Крылова, третьему входу блока введения поправки на угловую скорость вращения Земли и является выходом для массива параметров Родрига-Гамильтона кватерниона текущей ориентации, выход блока выработки признаков включения коррекции угловой ориентации подключен к первому входу блока вычисления погрешности угловой ориентации, выход которого подключен к первому входу блока оценки присутствия погрешности по угловой скорости, выход блока вычисления углов Эйлера-Крылова подключен ко второму входу блока оценки присутствия погрешности по угловой скорости, к четвертому входу блока вычисления погрешности угловой ориентации и является выходом для массива углов Эйлера-Крылова, выход блока начальной выставки датчиков угловых скоростей подключен к первым входам блока выработки признаков включения коррекции угловой ориентации и блока коррекции угловых скоростей, выход которого подключен ко второму входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, выход блока оценки присутствия погрешности по угловой скорости подключен ко второму входу блока коррекции угловых скоростей, выход блока введения поправки на угловую скорость вращения Земли подключен к третьему входу блока начальной выставки датчиков угловых скоростей, выход блока задания широты места подготовки к старту подключен ко второму входу блока введения поправки на угловую скорость вращения Земли, выход блока режима коррекции подключен к третьему входу блока вычисления начального угла рысканья, ко вторым входам блока начальной выставки датчиков угловых скоростей, блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации и пятому входу блока вычисления погрешности угловой ориентации.
Предлагаемое изобретение поясняется следующими чертежами, где представлены:
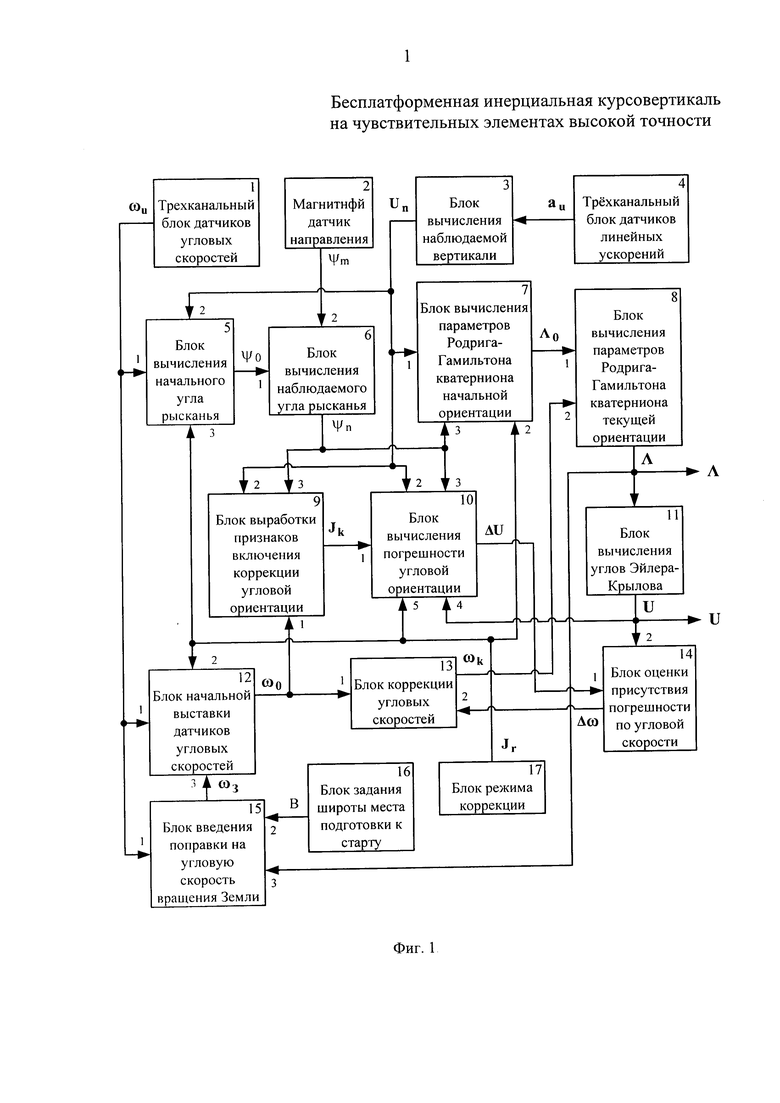
на фиг. 1 - блок-схема бесплатформенной инерциальной курсовертикали на чувствительных элементах высокой точности, на которой показаны: 1 - трехканальный блок датчиков угловых скоростей; 2 - магнитный датчик направления; 3 - блок вычисления наблюдаемой вертикали; 4 - трехканальный блок датчиков линейных ускорений; 5 - блок вычисления начального угла рысканья; 6 - блок вычисления наблюдаемого угла рысканья; 7 - блок вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации; 8 - блок вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации; 9 - блок выработки признаков включения коррекции угловой ориентации; 10 - блок вычисления погрешности угловой ориентации; 11 - блок вычисления углов Эйлера-Крылова; 12 - блок начальной выставки датчиков угловых скоростей; 13 - блок коррекции угловых скоростей; 14 - блок оценки присутствия погрешности по угловой скорости; 15 - блок введения поправки на угловую скорость вращения Земли; 16 - блок задания широты места подготовки к старту; 17 - блок режима коррекции; ωu - вектор измеренной угловой скорости; ψm - магнитный курс; Un - вектор наблюдаемой вертикали; au - вектор измеренного линейного ускорения; ψ0 - начальный угол рысканья; ψn - наблюдаемый угол рысканья; Λ0 - массив параметров Родрига-Гамильтона кватерниона начальной ориентации; Λ - массив параметров Родрига-Гамильтона кватерниона текущей ориентации; Jk - массив признаков включения коррекции угловой ориентации; ΔU - вектор погрешности угловой ориентации; U - массив углов Эйлера-Крылова; ω0 - вектор угловой скорости после начальной выставки; ωk - вектор угловой скорости после коррекции; Δω - вектор оценки присутствия погрешности по угловой скорости; ωЗ - вектор поправки на угловую скорость вращения Земли; B - широта места подготовки к старту; Jr - массив признаков режима коррекции;
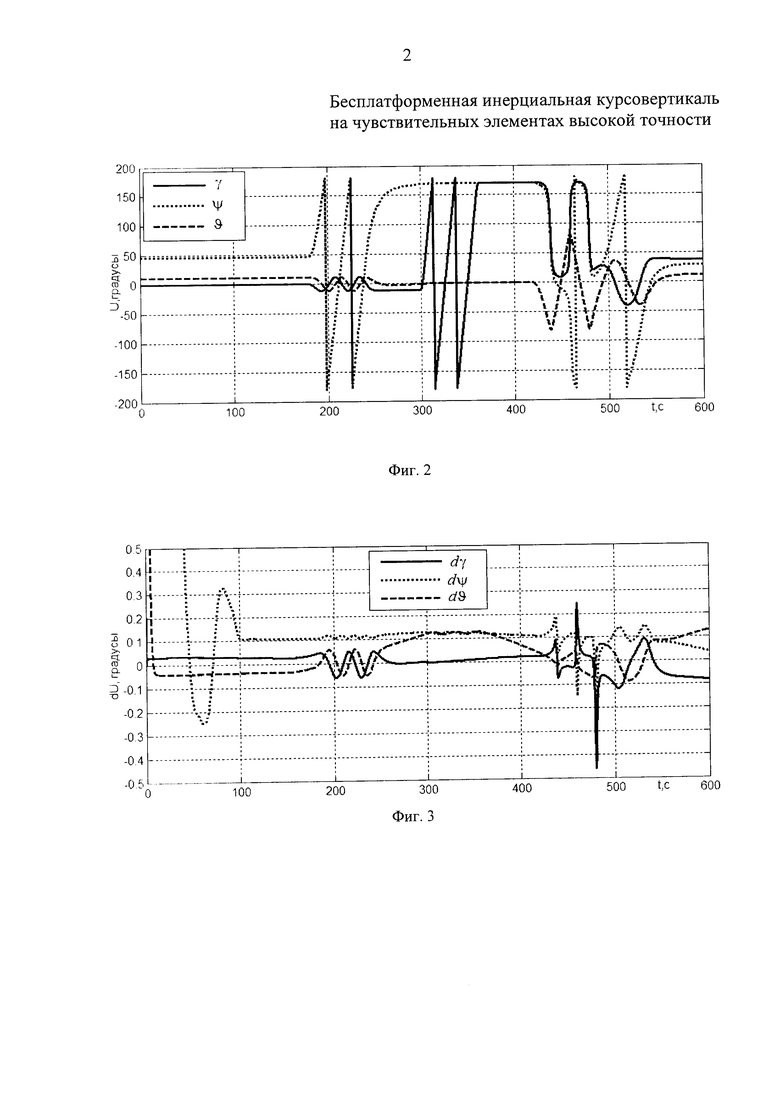
на фиг. 2 - характеристики изменения углов крена (γ), рысканья (ψ) и тангажа (ϑ) при движении летательного аппарата с вращением относительно вертикальной, продольной и поперечной осей;
на фиг. 3 - погрешности бесплатформенной инерциальной курсовертикали по углам крена (dγ), рысканья (dψ) и тангажа (dϑ) при движении летательного аппарата с вращением относительно вертикальной, продольной и поперечной осей.
БИКВ вычисляет массив Λ, который можно представить, например, массивом параметров Родрига-Гамильтона {λ0,λ1,λ2,λ3}, и массив углов Эйлера-Крылова U, который можно представить, например, массивом углов крена рысканья и тангажа БЛА {γ,ψ,ϑ}, где γ - угол крена; ψ - угол рысканья; ϑ - угол тангажа. Вычисления выполняются соответствующей обработкой угловых скоростей {ωxu,ωyu,ωzu}, линейных ускорений {axu,ayu,azu} и магнитного курса ψm, измеренных трехканальным блоком датчиков угловых скоростей, трехканальным блоком датчиков линейных ускорений и магнитным датчиком направления соответственно.
На выходе блока 1 формируется вектор измеренной угловой скорости ωu{ωxu,ωyu,ωzu}, выходным сигналом блока 2 является магнитный курс ψm, на выходе блока 4 формируется вектор измеренного линейного ускорения au{axu,ayu,azu}. Измерения выполняются на всех режимах, которые задаются в блоке 17 массивом Jr{Jr1,Jr2}, где Jr1 принимает единичное значение в режиме подготовки БЛА к полету (БЛА находится в неподвижном состоянии), а Jr2 принимает единичное значение в режиме полета БЛА, в ином состоянии Jr1 и Jr2 принимают нулевые значения.
Блок 3 вычисляет вектор наблюдаемой вертикали [3, с. 161-162]
 .
.
Блок 5 вычисляет начальный угол рысканья ψ0 в режиме подготовки БЛА к полету. Вычисления выполняются в соответствии с тем, что угловая скорость вращения Земли в плоскости меридиана равна нулю. Следовательно, измеренная датчиками угловых скоростей и приведенная к этой плоскости, угловая скорость БЛА в неподвижном состоянии относительно Земли также будет равна нулю. На этом основании имеем:

Выполнение приведенного условия реализуем в итерационном цикле вычислений или структурой с отрицательной обратной связью относительно начального угла рысканья ψ0, который фиксируется в момент выхода из режима подготовки.
Блок 6 в режиме подготовки к полету (Jr1=1) приравнивает наблюдаемый угол рысканья ψn к начальному углу рысканья ψ0 и вычисляет поправку к магнитному курсу ψm, в режиме полета (Jr2=1) наблюдаемый угол рысканья ψn определяется по магнитному курсу ψm, сложенному с поправкой, вычисленной в режиме подготовки к полету.
Блок 7 вычисляет массив нормированных параметров Родрига-Гамильтона кватерниона начальной ориентации [3, с. 144, с. 148-149]
 ,
,
где углы γn0, ψn0, ϑn0, полученные преобразованием наблюдаемых углов γn, ψn, ϑn: γn0=γnU(s,Jr1); ψn0=ψnU(s,Jr1); ϑn0=ϑnU(s,Jr1); функция U(s,Jr1) обеспечивает изменение наблюдаемых углов при Jr1=1 и фиксацию с момента обнуления Jr1; s - оператор преобразования Лапласа; ΛN - нормирующий параметр
Блок 8 вычисляет массив нормированных параметров Родрига-Гамильтона кватерниона текущей ориентации [3, с. 144, с. 155]
Блок 9 вырабатывает признаки включения коррекции угловой ориентации в полете БЛА. Отклонение от равномерного полета приводит к отклонению наблюдаемых углов ориентации от истинных, о чем свидетельствует неравенство нулю производных от наблюдаемых углов ориентации. Отклонение от прямолинейного полета приводит к возникновению угловых скоростей, отличных от нуля. Массив признаков Jk{Jku,Jkω} включения коррекции угловой ориентации представим признаком равномерного полета Jku и признаком прямолинейного полета Jkω, которые принимают значения единицы или нуля в соответствии с условиями:
если |γnS|∧|ϑnS|∧|ψnS|<dUmax, то Jku=1, иначе Jku=0;
если |ωx0|∧|ωy0|∧|ωz0|<ωmax, то Jkω=1, иначе Jkω=0,
где предельные значения dUmax и ωmax выбираются в соответствии с допустимой погрешностью угловой ориентации; s - оператор преобразования Лапласа.
Блок 10 вычисляет вектор погрешности угловой ориентации
 ,
,
где ±ΔUОГР - ограничение погрешности угловой ориентации, определяется допустимой погрешностью угловой ориентации.
Блок 11 вычисляет массив углов Эйлера-Крылова БЛА {γ,ψ,ϑ} [3, с. 156, 159].

Блок 12 вычисляет вектор угловой скорости после начальной выставки ω0{ωx0,ωy0,ωz0}, в соответствии с вычислительной процедурой
ω0{ωx0,ωy0,ωz0}=ω(s,Jr1)(ωu{ωxu,ωyu,ωzu}-ωЗ{ωxз,ωyз,ωzз}),
где функция ω(s,Jr1) обеспечивает обнуление вектора угловой скорости ω0{ωx0,ωy0,ωz0} и вычисление компенсирующей составляющей, обнуляющей погрешности трехканального блока датчиков угловых скоростей, при Jr1=1, фиксацию компенсирующей составляющей и ее учет в измерении вектора угловой скорости с момента обнуления Jr1; s - оператор преобразования Лапласа.
Блок 13 вычисляет корректированный вектор угловых скоростей
ωk{ωxk,ωyk,ωzk}=ω0{ωx0,ωy0,ωz0}+Δω{Δωx,Δωy,Δωz}.
По величине погрешности угловой ориентации вертикали ΔU{Δγ,Δϑ} блок 14 оценивает присутствие погрешности по угловой скорости
 ,
,
где ±ΔωОГР - ограничение погрешности угловой скорости, выбирается в соответствии с погрешностью датчиков угловых скоростей; s - оператор преобразования Лапласа.
Компоненты вектора Δω не определяют точные значения погрешности трехканального блока датчиков угловых скоростей, но их отличие от нуля показывает, что погрешности присутствуют. Контур, включающий блоки 13, 8, 11 и 14, с отрицательной обратной связью приводит компоненты вектора Δω к нулевым значениям, следовательно, компенсирует погрешности трехканального блока датчиков угловых скоростей, повышая точность определения ориентации БЛА в параметрах Родрига-Гамильтона и углах Эйлера-Крылова.
Блок 15 вычисляет вектор поправки на угловую скорость вращения Земли, преобразуя угловую скорость вращения из геоцентрической системы координат Ωз{0,Ωyз,0}=Ωз{0,15⋅π/180/3600,0} в связанную систему координат
 ,
,
где B - широта места подготовки к старту.
Блок 16 задает широту места подготовки к старту B.
Исследование бесплатформенной инерциальной курсовертикали на чувствительных элементах высокой точности (погрешности датчиков угловых скоростей не более 0,6°/час; погрешности датчиков линейных ускорений не более 0,006 м/с2) показало, что при полете БЛА с вращением относительно вертикальной, поперечной и продольной осей на углы более 180 градусов (см. фиг. 2) погрешности по углам крена (dγ), рысканья (dψ) и тангажа (dϑ) (см. фиг. 3) не превышают 0,12 градуса, а при вращении относительно поперечной оси не превышают 0,5 градуса.
Таким образом, заявляемая бесплатформенная инерциальная курсовертикаль на чувствительных элементах высокой точности обеспечивает построение всережимной бесплатформенной инерциальной курсовертикали с высокими техническими характеристиками без использования внешней информации.
Источники информации
1. Патент RU 2487318 Бесплатформенная инерциальная курсовертикаль на чувствительных элементах средней точности, опубл. 10.07.2013 г. Бюл. №19 (аналог).
2. Патент RU 2373498 Навигационный комплекс, устройство вычисления скорости и координат, бесплатформенная инерциальная курсовертикаль, способ коррекции инерциальных датчиков и устройство для его осуществления, опубл. 20.11.2009 г. Бюл. №32 (прототип).
3. Основы построения бесплатформенных инерциальных навигационных систем /В.В. Матвеев, В.Я. Распопов/ Под общ. ред. д.т.н. В.Я. Распопова. - СПб.: ГНЦ РФ ОАО Концерн ЦНИИ «Электроприбор», 2009. - 280 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2615033C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
Изобретение относится к бесплатформенным инерциальным курсовертикалям и может найти применение в беспилотных летательных аппаратах различных классов для определения угловой ориентации в нормальной земной системе координат при выполнении сложных маневров, в том числе и фигур высшего пилотажа. Технический результат – расширение функциональных возможностей. Для этого обеспечивается построение всережимной бесплатформенной инерциальной курсовертикали на чувствительных элементах высокой точности (погрешности датчиков угловых скоростей не более 0,6°/час; погрешности датчиков линейных ускорений не более 0,006 м/с2) без использования внешней информации. При этом обеспечивается автоматическая начальная выставка курсовертикали, списание погрешности датчиков угловых скоростей непосредственно перед полетом и периодическая коррекция датчиков угловых скоростей в полете, а также использование кватернионных вычислений. 3 ил.
Бесплатформенная инерциальная курсовертикаль на чувствительных элементах высокой точности, содержащая трехканальный блок датчиков линейных ускорений, магнитный датчик направления, трехканальный блок датчиков угловых скоростей, блок вычисления погрешности угловой ориентации, блок вычисления наблюдаемой вертикали, блок введения поправки на угловую скорость вращения Земли, блок коррекции угловых скоростей, блок оценки присутствия погрешности по угловой скорости, блок вычисления наблюдаемого угла рысканья, блок выработки признаков включения коррекции угловой ориентации, блок режима коррекции, отличающаяся тем, что в нее дополнительно введены блок вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, блок вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, блок вычисления начального угла рысканья, блок вычисления углов Эйлера-Крылова, блок начальной выставки датчиков угловых скоростей, блок задания широты места подготовки к старту, причем выход трехканального блока датчиков угловых скоростей подключен к первым входам блока вычисления начального угла рысканья, блока начальной выставки датчиков угловых скоростей и блока введения поправки на угловую скорость вращения Земли, выход магнитного датчика направления подключен ко второму входу блока вычисления наблюдаемого угла рысканья, выход трехканального блока датчиков линейных ускорений подключен к входу блока вычисления наблюдаемой вертикали, выход которого подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации и ко вторым входам блока вычисления начального угла рысканья, блока выработки признаков включения коррекции угловой ориентации и блока вычисления погрешности угловой ориентации, выход блока вычисления начального угла рысканья подключен к первому входу блока вычисления наблюдаемого угла рысканья, выход которого подключен к третьим входам блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, блока выработки признаков включения коррекции угловой ориентации и блока вычисления погрешности угловой ориентации, выход блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, выход которого подключен к входу блока вычисления углов Эйлера-Крылова, третьему входу блока введения поправки на угловую скорость вращения Земли и является выходом для массива параметров Родрига-Гамильтона кватерниона текущей ориентации, выход блока выработки признаков включения коррекции угловой ориентации подключен к первому входу блока вычисления погрешности угловой ориентации, выход которого подключен к первому входу блока оценки присутствия погрешности по угловой скорости, выход блока вычисления углов Эйлера-Крылова подключен ко второму входу блока оценки присутствия погрешности по угловой скорости, к четвертому входу блока вычисления погрешности угловой ориентации и является выходом для массива углов Эйлера-Крылова, выход блока начальной выставки датчиков угловых скоростей подключен к первым входам блока выработки признаков включения коррекции угловой ориентации и блока коррекции угловых скоростей, выход которого подключен ко второму входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, выход блока оценки присутствия погрешности по угловой скорости подключен ко второму входу блока коррекции угловых скоростей, выход блока введения поправки на угловую скорость вращения Земли подключен к третьему входу блока начальной выставки датчиков угловых скоростей, выход блока задания широты места подготовки к старту подключен ко второму входу блока введения поправки на угловую скорость вращения Земли, выход блока режима коррекции подключен к третьему входу блока вычисления начального угла рысканья, ко вторым входам блока начальной выставки датчиков угловых скоростей, блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации и пятому входу блока вычисления погрешности угловой ориентации.
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, стр.6 - 8 | |||
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |
| US 5237952 A, 08.24.1993. | |||

