Предполагаемое изобретение относится к системам ориентации и навигации подвижных объектов различного типа, в частности к бесплатформенным инерциальным курсовертикалям (БИКВ), в которых используется измерительная информация, получаемая с датчиков угловых скоростей (ДУС) (лазерных или иного типа) и с блока акселерометров.
БИКВ предназначены для определения угловой ориентации объекта относительно некоторой базовой системы координат, например нормальной системы координат в соответствии с ГОСТ 20058-80 “Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения”. Обычно они входят в состав бесплатформенных инерциальных навигационных систем (БИНС), но могут использоваться и самостоятельно.
Известны бесплатформенные системы ориентации, основанные на применении блока ДУС и вычислительного устройства (ВУ) [1]. Оси чувствительности ДУС ориентированы вдоль осей связанной системы координат и вырабатывают три взаимно ортогональные составляющие абсолютной угловой скорости летательного аппарата (ЛА). Выходные сигналы блока ДУС обрабатываются ВУ в соответствии с алгоритмом ориентации, реализующим интегрирование дифференциальных кинематических уравнений движения объекта с целью выработки параметров ориентации, к которым относят угол крена γ, угол рысканья ψ и угол тангажа ϑ.
Известна также бесплатформенная система ориентации, состоящая из блока ДУС и блока определения угловой ориентации, цепочки n (n не меньше 1), последовательно соединенных трехканальных интеграторов и блока синхронного перезапуска интеграторов [2]. На входы первого интегратора поступают выходные сигналы блока ДУС, представляющие собой текущие значения первых интегралов от измеряемых составляющих угловой скорости, а выходные сигналы блока ДУС и всех интеграторов поступают на вход блока ориентации, где и производится вычисление параметров ориентации. Все интеграторы имеют дополнительный вход, на который из блока перезапуска поступает сигнал, обеспечивающий синхронный перезапуск с обнулением всех интеграторов с тактом, равным такту опроса блока ДУС. За счет использования в блоке ориентации выходных сигналов интеграторов, представляющих собой приращения кратных интегралов от измеряемых составляющих угловой скорости, необходимая точность выработки параметров угловой ориентации в условиях высокочастотных шумов ДУС и угловой вибрации основания обеспечивается без применения в блоке ориентации дополнительного сглаживания выходных сигналов блока ДУС.
Наиболее близким к заявляемому устройству является БИКВ, которая содержит блок лазерных (или другого типа) ДУС, блок линейных акселерометров, блок начальной выставки, блок интеграторов, вычисляющий матрицу ориентации интегрированием модифицированного уравнения Пуассона, блок вычисления дополнительных угловых скоростей ЛА, обусловленных кривизной траектории облета земного эллипсоида, блок пересчета матрицы ориентации в углы ориентации [3]. В известном устройстве алгоритмическими средствами уменьшается влияние методических погрешностей вычисления углов крена, курса и тангажа, обусловленных кривизной траектории облета летательным аппаратом земного эллипсоида. Инструментальные погрешности ДУС и линейных акселерометров должны быть достаточно малыми. Однако наибольшее влияние на точность вычисления углов ориентации оказывают ненулевые сигналы ДУС и акселерометров при отсутствии угловых скоростей и линейных ускорений, так как в процессе интегрирования происходит накопление ошибок. Например, нулевой сигнал ДУС не должен превышать 1-3 град/ч, тогда уход БИКВ за час составит несколько градусов. При использовании в известном устройстве датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации, ошибки вычисления углов могут достигать сотен градусов.
Общими признаками предполагаемого изобретения и прототипа являются установленные на ЛА трехканальный блок ДУС, трехканальный блок линейных акселерометров и блок интеграторов.
Техническим результатом заявляемого изобретения является снижение до одного градуса ошибки выработки параметров угловой ориентации объекта при использовании датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации. Для достижения этого технического результата в состав БИКВ (помимо общих с прототипом блоков) дополнительно введены формирователь производных от углов ориентации, блок коррекции, блок вычисления наблюдаемой вертикали, блок вычисления ошибок курсовертикали, фильтр, блок выставки курса, при этом входы формирователя производных от углов ориентации соединены с выходами трехканального блока ДУС и выходами блока интеграторов, блок коррекции соединен с выходами формирователя производных от углов ориентации и выходами фильтра, а выходы блока коррекции соединены с блоком интеграторов, входы блока вычисления ошибок курсовертикали соединены с выходами блока вычисления наблюдаемой вертикали, с выходами блока выставки курса и с выходами блока интеграторов, а выходы блока вычисления ошибок курсовертикали соединены с фильтром, входы блока вычисления наблюдаемой вертикали соединены с выходами трехканального блока линейных акселерометров, входы блока выставки курса соединены с выходом блока коррекции и с аппаратурой, вычисляющей начальную или накопившуюся ошибку по курсу.
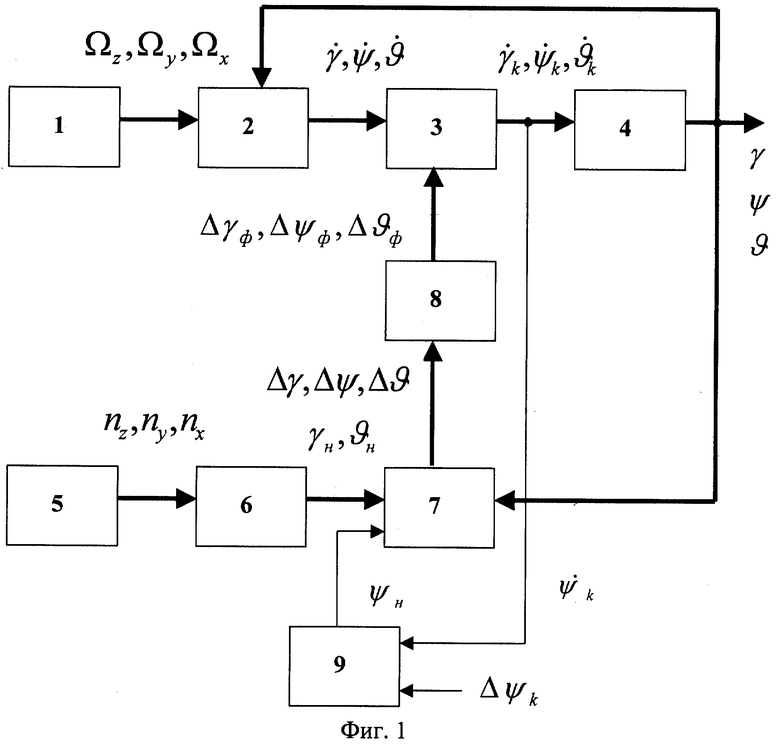
Функциональная схема бесплатформенной инерциальной курсовертикали изображена на фиг.1.
На фиг.1 показаны: 1 - трехканальный блок ДУС, 2 – формирователь производных от углов ориентации, 3 - блок коррекции, 4 - блок интеграторов, 5 - трехканальный блок линейных акселерометров, 6 - блок вычисления наблюдаемой вертикали, 7 - блок вычисления ошибок курсовертикали, 8 - фильтр, 9 - блок выставки курса.
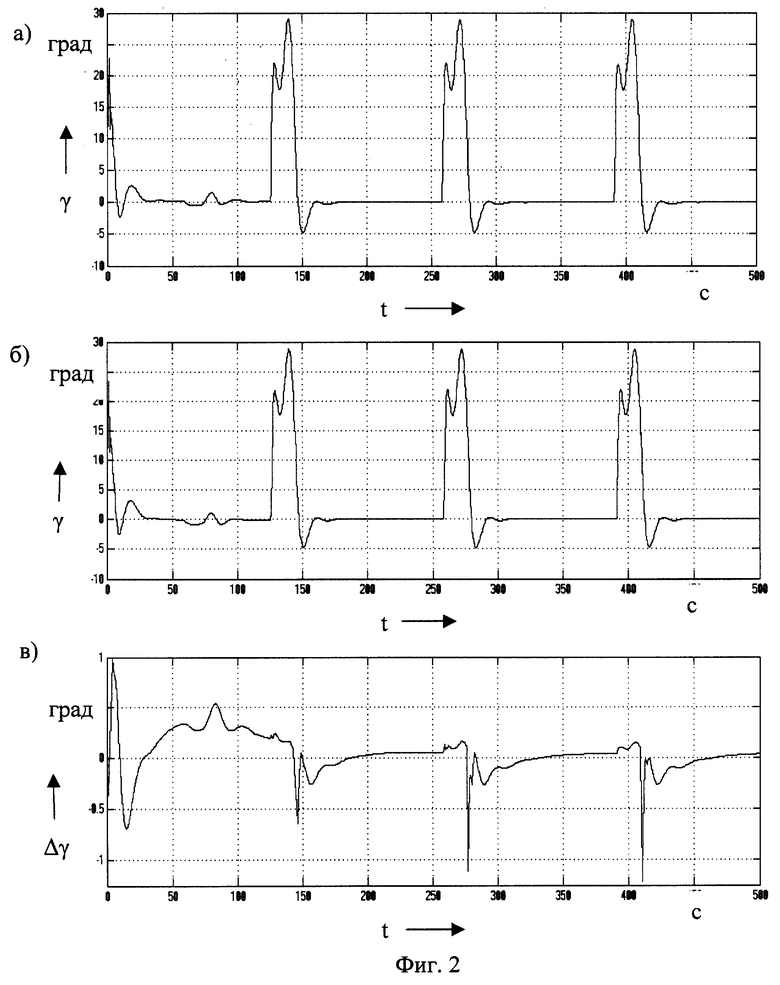
На фиг.2 приведены графики изменения углов ориентации и ошибок БИКВ по крену при моделировании полета ЛА по замкнутой траектории с тремя правыми поворотами на 90 градусов и использовании ДУС и линейных акселерометров средней точности: а) фактической угловой ориентации ЛА по крену, б) угла крена, вычисленного БИКВ, в) ошибки определения угловой ориентации по крену для заявляемого устройства.
Заявляемое устройство работает следующим образом.
Угловые скорости Ωx, Ωy, Ωz измеряются трехканальным блоком датчиков угловых скоростей 1, оси чувствительности которых ориентированы вдоль осей связанной системы координат. Измеренная информация подается на формирователь производных от углов ориентации 2, который выполняет операцию преобразования угловых скоростей ЛА в связанной системе координат в производные от углов ориентации ЛА относительно нормальной системы координат  =Ωx-(Ωycosγ-Ωzsinγ)·tgϑ,
=Ωx-(Ωycosγ-Ωzsinγ)·tgϑ,  =(Ωycosγ-Ωzsinγ)/cosϑ;
=(Ωycosγ-Ωzsinγ)/cosϑ;  =Ωy sinγ+Ωz, cosγ, при этом используются углы ориентации, вычисленные блоком интеграторов 4. Производные от углов ориентации содержат ошибки, обусловленные систематическими и случайными погрешностями измерений ДУС. Из систематических погрешностей наибольший вклад в ошибки вычисления углов ориентации вносят погрешности нуля ДУС. Блок коррекции 3 вычитает из производных от углов ориентации погрешности, вызванные дрейфом нуля ДУС, и формирует скорректированные производные от углов ориентации ЛА
=Ωy sinγ+Ωz, cosγ, при этом используются углы ориентации, вычисленные блоком интеграторов 4. Производные от углов ориентации содержат ошибки, обусловленные систематическими и случайными погрешностями измерений ДУС. Из систематических погрешностей наибольший вклад в ошибки вычисления углов ориентации вносят погрешности нуля ДУС. Блок коррекции 3 вычитает из производных от углов ориентации погрешности, вызванные дрейфом нуля ДУС, и формирует скорректированные производные от углов ориентации ЛА  k=
k= +Δγф;
+Δγф;  k+
k+ ф;
ф;  k=
k= +Δ
+Δ ф.
ф.
Полученные с выхода блока коррекции 3 сигналы интегрируются блоком интеграторов 4  причем при интегрировании ошибка не накапливается, так как в структуре входных сигналов в блок интеграторов 4 нет постоянной составляющей ошибки. Блок интеграторов 4 является фильтром нижних частот и, следовательно, подавляет высокочастотную составляющую шумов ДУС.
причем при интегрировании ошибка не накапливается, так как в структуре входных сигналов в блок интеграторов 4 нет постоянной составляющей ошибки. Блок интеграторов 4 является фильтром нижних частот и, следовательно, подавляет высокочастотную составляющую шумов ДУС.
Для коррекции курсовертикали по крену и тангажу используется трехканальный блок линейных акселерометров 5. В зависимости от величины наблюдаемых ускорений nx, ny, nz вычисляются углы отклонения ЛА от наблюдаемой вертикали, которые выполняются блоком вычисления наблюдаемой вертикали 6 в соответствии с выражениями γн=arctg(nz/ny); ϑн=arctg(nx/ny). Наблюдаемый курс ψн вырабатывается блоком выставки курса 9 в соответствии с выражением  где
где  k - скорректированная производная от курсового угла, поданная с блока коррекции 3; kψk - коэффициент, определяющий скорость коррекции; Δψk - начальная или накопившаяся ошибка по курсу, поданная на блок вычисления ошибок курсовертикали 7 с внешней аппаратуры.
k - скорректированная производная от курсового угла, поданная с блока коррекции 3; kψk - коэффициент, определяющий скорость коррекции; Δψk - начальная или накопившаяся ошибка по курсу, поданная на блок вычисления ошибок курсовертикали 7 с внешней аппаратуры.
Наблюдаемые углы ориентации содержат статические и динамические ошибки, причем статические ошибки определяются инструментальными погрешностями акселерометров, а динамические ошибки определяются переходными процессами в акселерометрах и динамикой ЛА. При отсутствии ошибок наблюдаемые углы ориентации совпадали бы с истинными углами ориентации ЛА в нормальной системе координат. С другой стороны, углы ориентации ЛА вычисляются блоком интеграторов 4, которые также содержат статические и динамические ошибки. Статические ошибки обусловлены интегрированием преимущественно погрешностей нуля ДУС, не полностью скомпенсированных блоком коррекции 3. Динамические ошибки обусловлены недостаточной эффективностью фильтрации сигналов блоком интеграторов 4. При отсутствии ошибок вычисленные углы ориентации также совпадали бы с истинными углами ориентации ЛА в нормальной системе координат. Блок вычисления ошибок курсовертикали 7 вычисляет разность между наблюдаемыми и вычисляемыми углами ориентации Δγ=γн-γ; Δψ=ψн-ψ; Δϑ=ϑн-ϑ. В структуре выходного сигнала блока вычисления ошибок курсовертикали 7 сохраняются только ошибки и полностью отсутствует точная информация об углах ориентации ЛА в нормальной системе координат.
Полученные на выходе блока вычисления ошибок курсовертикали 7 сигналы пропускаются через фильтр 8, который вычисляет

Коэффициенты усиления блока выбраны такими, чтобы подавлялись переменные сигналы. На выходе фильтра 8 сохраняются преимущественно статические ошибки. Наибольший вес будут иметь статические ошибки, обусловленные интегрированием погрешностей нуля ДУС. Статические ошибки со знаком минус, поданные с фильтра 8 на блок коррекции 3, скомпенсируют статические погрешности нуля ДУС. Эта компенсация будет непрерывно действующей и полной, так как контур, содержащий блоки 3, 4, 7 и 8 замкнут с инверсией знака и содержит операцию интегрирования. Эта же связь обеспечивает дополнительную компенсацию и динамических ошибок БИКВ.
Таким образом, совокупность общих с прототипом и дополнительно введеных блоков, а также связей между блоками в заявляемом устройстве обеспечивает снижение до одного градуса ошибок выработки параметров угловой ориентации объекта при использовании датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации.
Источники информации
1. Гироскопические системы. Гироскопические приборы и системы:
Учебник для вузов/ Д.С.Пельпор, И.А.Михалев, В.А.Бауман и др. Под ред. Д.С.Пельпора. 2-е изд. - М.:Высш. шк.,1988. -С.314-321.
2. Патент RU 2154810, кл. G 01 С 21/12 Бесплатформенная система ориентации, дата подачи заявки 1998.03.19.
3. Дмитраченко Л.А., Гора В.П., Савинов Г.Ф. Бесплатформенные инерциальные навигационные системы: Учебное пособие. -М.: МАИ, 1984. -С. 29-35.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ ВЫСОКОЙ ТОЧНОСТИ | 2015 |
|
RU2615032C1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2615033C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
Изобретение относится к системам ориентации и навигации подвижных объектов. Устройство содержит трехканальный блок датчиков угловых скоростей (ДУС), трехканальный блок линейных акселерометров, блок интеграторов, формирователь производных от углов ориентации, блок коррекции, блок вычисления наблюдаемой вертикали, блок вычисления ошибок курсовертикали, фильтр, блок выставки курса. Угловые скорости, измеренные трехканальным блоком ДУС и преобразованные в производные от углов ориентации, содержат ошибки, обусловленные систематическими и случайными погрешностями измерений. При интегрировании угловых скоростей блоком интеграторов ошибка не накапливается, так как из входных сигналов в блок интеграторов постоянная составляющая ошибки вычитается. Крен и тангаж корректируются блоком коррекции с использованием блока вычисления наблюдаемой вертикали и блока линейных акселерометров. Курс корректируется блоком коррекции с использованием блока выставки курса. Блок вычисления ошибок курсовертикали вычисляет разность между наблюдаемыми и вычисляемыми углами ориентации, фильтр сохраняет преимущественно статические ошибки, которые подаются на блок коррекции для компенсации погрешностей бесплатформенной инерциальной курсовертикали. Эта компенсация будет непрерывно действующей и полной, так как выполняется по замкнутой схеме с инверсией знака и содержит операцию интегрирования. Техническим результатом является снижение ошибки выработки параметров угловой ориентации объекта при использовании датчиков средней точности, которые целесообразно применять в малоразмерной беспилотной авиации. 2 ил.
Бесплатформенная инерциальная курсовертикаль, содержащая трехканальный блок датчиков угловых скоростей, трехканальный блок линейных акселерометров, блок интеграторов, отличающаяся тем, что в нее дополнительно введены формирователь производных от углов ориентации, блок коррекции, блок вычисления наблюдаемой вертикали, блок вычисления ошибок курсовертикали, фильтр, блок выставки курса, при этом входы формирователя производных от углов ориентации соединены с выходами трехканального блока датчиков угловых скоростей и выходами блока интеграторов, блок коррекции соединен с выходами формирователя производных от углов ориентации и выходами фильтра, а выходы блока коррекции соединены с блоком интеграторов, входы блока вычисления ошибок курсовертикали соединены с выходами блока вычисления наблюдаемой вертикали, с выходами блока выставки курса и с выходами блока интеграторов, а выходы блока вычисления ошибок курсовертикали соединены с фильтром, входы блока вычисления наблюдаемой вертикали соединены с выходами трехканального блока линейных акселерометров, входы блока выставки курса соединены с выходом блока коррекции и с аппаратурой, вычисляющей начальную или накопившуюся ошибку по курсу.
| ДМИТРАЧЕНКО Л.А | |||
| и др., Бесплатформенные инерциальные навигационные системы, М., МАИ, 1984, с.29-35 | |||
| БЕСПЛАТФОРМЕННАЯ СИСТЕМА ОРИЕНТАЦИИ | 1998 |
|
RU2154810C2 |
| Гироскопические системы | |||
| Гироскопические приборы и системы, п/ред | |||
| Д.С.Пельпора, М., Высшая школа, 1988, с.314-321 | |||
| WO 00/46573 A1, 10.08.2000 | |||
| US 5590044 А, 31.12.1996. | |||

