Устройство управления вибрационным полем технологической машины
Изобретение относится машиностроению и может быть использовано в технологических машинах для получения режимов вибрационного подбрасывания сыпучих сред.
Современные транспортные и технологические машины работают в условиях интенсивных динамических нагружений, которые формируются специальными устройствами для возбуждения колебаний или являются следствием контакта машин с опорной поверхностью или рабочей средой.
Задачи динамики такого рода машин связаны с использованием в качестве расчетных схем механических колебательных систем с несколькими степенями свободы. Для оценки динамических свойств механических колебательных систем широко используются методы математического моделирования, основанные на аналитических подходах, а также теории цепей и теории автоматического управления [1-4].
Известны и разработаны способы и средства изменения вибрационных состояний различных технических объектов в связи с решением задач динамики, что нашло отражение в известных работах [5-7].
Вибрационное поле технологической машины или транспортного устройства представляет собой распределение колебаний отдельных точек рабочих органов машины, которые имеют пространственную метрику. Изменение структуры и параметров вибрационного поля осуществляется на основе применения управляющих алгоритмов, динамических гасителей колебаний, устройств для преобразования движения, в том числе с использованием дополнительных связей, которые вводятся в расчетную схему машины.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известен патент на полезную модель динамического гасителя колебаний [Сиваков В.П., Ананьин А.А. «Динамический гаситель колебаний», патент 24141 U1 RU, МПК В17В 3/12, опубликовано 27.07.2012],
содержащий опорную платформу с полозьями, на которых имеется возможность перемещения регулирующих устройств, виброгасящей массы, установленной на упругой связи, направляющих, отличающийся тем, что упругая связь выполнена в виде криволинейных направляющих с изменяемым радиусом кривизны посредством регулирующих устройств, причем криволинейные направляющие шарнирно закреплены на опорной платформе.
К недостаткам данного изобретения можно отнести отсутствие в системе достаточного количества упругих связей и неточность ручной регулировки.
Известен способ виброзащиты машин [Устинов Ю.Ф., Иванов В.П., А.В. Скрынников, «Способ виброзащиты машин», патент №2453746 С2, МПК F16F 15/08, F16F 3/08, F16F 1/52 опубликовано 20.06.2012], включающий соединение защищаемого объекта с ее рамой посредством типовых резинометаллических виброизоляторов, состоящих из двух косоразмещенных призматических упругих элементов привулканизированных к верхним и нижним металлическим пластинам, наклоненных к раме объекта, отличающийся тем, что, с целью снижения вибрации защищаемого объекта при выполнении технологических операций с изменением режима ее работы, соответственно принудительно плавно изменяют жесткость виброизоляторов путем одновременного поворота на одинаковый угол по отношению к защищаемому объекту верхних и нижних металлических пластин и привулканизированных к ним упругих призматических элементов. Нижние металлические пластины с одной стороны в шарнирах соединены с ползунами, входящими в поступательные пары с рамой. С другой стороны, нижние металлические пластины в шарнирах соединены со штоками гидроцилиндров, соединенных в шарнирах с рамой машины.
Представленный способ имеет ряд недостатков. Среди них можно выделить отсутствие в конструкции устройств для регулировки жесткостных параметров.
Известна также конструкция виброизолятора [Кочетов О.С., Стареева М.О., Стареева М.М., «Виброизолятор тросовый», патент №2509930 С2, МПК F16F 7/14, F16F 13/00, опубликовано 20.03.2014], содержащая упругий элемент из отрезков стального троса, выполненных дугообразной формы, которые расположены в ряд слева и справа по длине верхней и нижней опорных плит, в которых посредством планок закреплены концы отрезков стального троса, а вершины дуг отрезков стального троса обращены к вертикальной оси виброизолятора. Крепление виброизолируемого объекта осуществляется посредством резьбовых отверстий, оси которых параллельны между собой и лежат в вертикальной плоскости, проходящей через вертикальную ось виброизолятора. По длине верхней и нижней опорных плит и в планках выполнены продольные канавки для запрессовки концов троса, или по длине верхней и нижней опорных плит и в планках выполнены резьбовые отверстия для закрепления концов троса с помощью винтов 9. По длине верхней и нижней опорных плит вдоль всей длины планок закреплены в ряд слева и справа от вертикальной оси виброизолятора гидравлические демпферы, которые могут быть установлены как по всей длине планок, так и с определенным (постоянным) или переменным шагом в зависимости от характеристик виброизолируемого объекта.
Каждый из гидравлических демпферов содержит шток, жестко закрепленный в днище, соосной с ним цилиндрической гильзы с образованием герметичной кольцевой полости между внешней поверхностью штока и внутренней поверхностью цилиндрической гильзы, днище которой закреплено во втулке, жестко связанной с основанием защищаемого объекта. В кольцевой полости расположена пружина, которая нижним торцем опирается в днище, а верхним - в поршень, выполненный в виде диска, и расположенный с дросселирующим зазором относительно штока.
В верхней части штока расположена подвижная относительно штока крышка, состоящая из кольцевого фланца с уплотнением относительно штока и жестко связанной с фланцем втулки, соосной со штоком и охватывающей внешнюю поверхность цилиндрической гильзы через уплотнение. Коаксиально штоку расположена пружина, верхний торец которой опирается в крышку, а нижний - в поршень. На крышке фиксируется опорный элемент виброизолируемого объекта.
При колебаниях виброизолируемого объекта дугообразные отрезки троса воспринимают как вертикальные, так и горизонтальные нагрузки, ослабляя тем самым динамическое воздействие на виброизолируемый объект, т.е. обеспечивается пространственная виброзащита и защита от ударов. За счет трения между стальными жилами троса происходит рассеивание колебательной энергии и снижение передачи усилий на фундамент.
Колебания виброизолируемого объекта передаются на шток, при этом пружина воспринимает вертикальные нагрузки, ослабляя тем самым динамическое воздействие. Существенно повысить демпфирование в системе на резонансных режимах работы возможно за счет диссипации энергии при прохождении среды через дросселирующие отверстия в поршне. Существенно повысить демпфирование в системе на резонансных режимах работы возможно за счет диссипации энергии при прохождении среды через дросселирующий зазор в поршне.
Основным недостатком данного изобретения является отсутствие регулирования динамического состояния виброизолятора, а также отсутствие в системе режима динамического гашения колебаний.
К наиболее близкому техническому решению следует способ [Елисеев С.В., Елисеев А.В., Каимов Е.В., Нгуен Д.Х., Выонг Куанг Чык (RU) «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», патент 2624757 C1 RU, МПК F16F 15/02,
опубликовано 06.07.2017], состоящий из рабочего органа в виде твердого тела на упругих элементах, имеющего инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивало возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса. Устройство, реализующее способ, представляет собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда. Устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
К недостаткам данного изобретения следует отнести крепление устройства для преобразования движения и к объекту защиты и к опорной поверхности, что усложняет конструкцию и дополнительно нагружает эти места крепления, что уменьшает их срок службы.
Задачей предлагаемого устройства является управление структурой и параметрами вибрационного поля при помощи использования эффектов, создаваемых настраиваемым динамическим гасителем колебаний рычажного типа.
Устройство управления вибрационным полем технологической машины или транспортного средства, представляющее собой систему контроля над параметрами вибрационного поля с подвижным устройством уменьшения колебаний, отличающееся тем, что на рабочем органе технологической машины установлен управляемый динамический гаситель колебаний, представляющий собой рычажный механизм, с одного конца жестко прикрепленный к рабочему органу, а с другого имеющий на конце дополнительную массу и прикрепленный через упругий элемент, и его перемещение осуществляется при помощи управляющего блока в каретке, представляющей собой ласточкин хвост.
Изобретение поясняется чертежами.
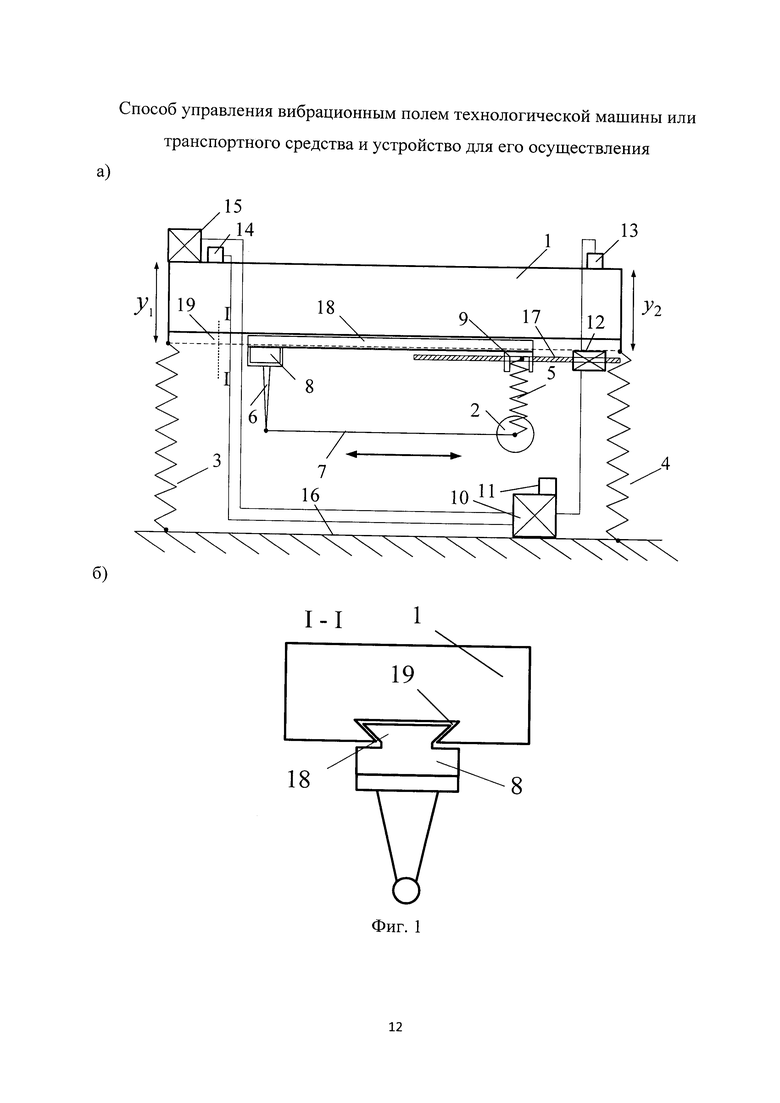
На фиг. 1 приведена схема для формирования структуры вибрационного поля и сечения исполнительного механизма.
На фиг. 1, а показаны: рабочий орган 1; дополнительная масса 2; упругие элементы 3, 4, 5; пилон 6, рычажный механизм динамического гасителя колебаний 7; средства крепления 8, 9; блок управления 10, преобразователь 11, электропривод 12, датчики параметров вибрационного поля 13, 14; инерционный вибровозбудитель 15; основание 16, ходовой винт 17. На фиг. 1, 6 приведена схема крепления подвижного динамического гасителя, представляющая собой каретку 18 в виде «ласточкиного хвоста», помещенную в паз и перемещаемую вдоль рабочего органа
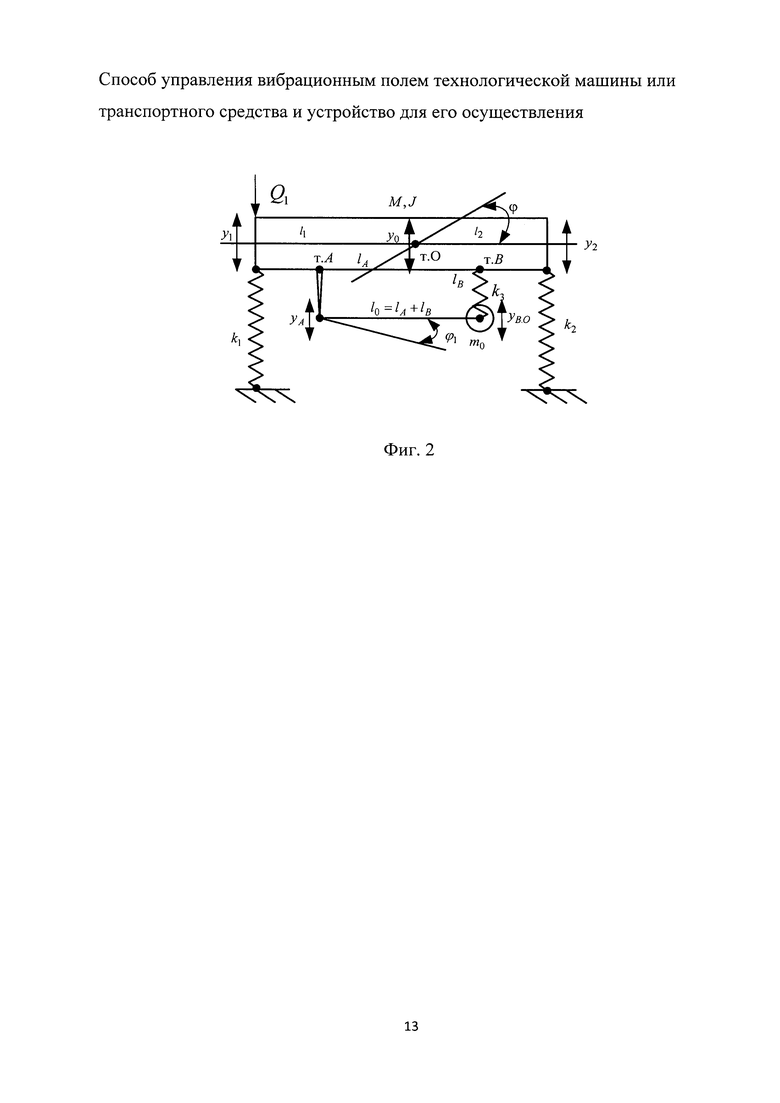
На фиг. 2 показана принципиальная расчетная схема вибрационного технологического комплекса.
Введены следующие обозначения: у0 - колебания центра тяжести рабочего органа 1; М - масса рабочего органа 10; J - момент инерции рабочего органа 1; у1, у2 - линейные колебания рабочего органа 1; уВ.О, yА -
линейные колебания крепления динамического гасителя; ϕ - угловое колебание рабочего органа 1; ϕ1 - угловое колебание динамического гасителя 10; т. О - центр тяжести рабочего органа 10; т. А - точка крепления неподвижной части динамического гасителя к направляющей 2; т. В - точка крепления упругого элемента динамического гасителя к направляющей 2; l0 - расстояние между крайними точками динамического гасителя; k1, k2, k3 - жесткости упругих элементов 7, 8, 9.
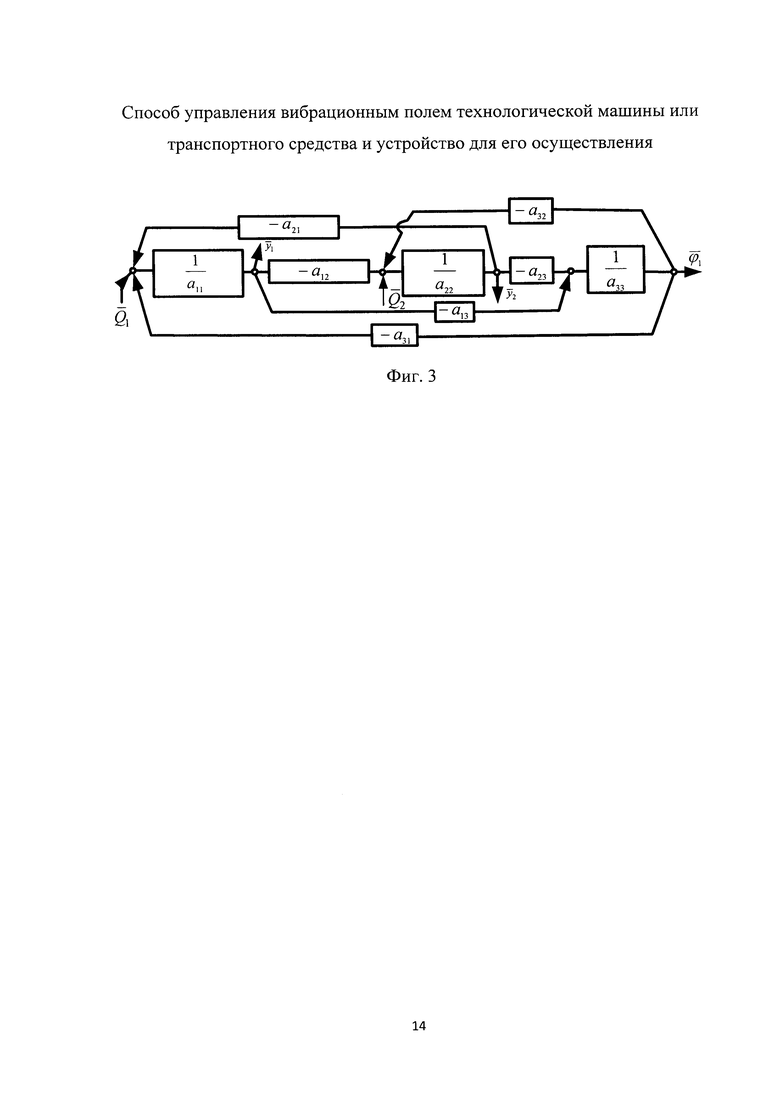
На фиг. 3 показана структурная схема, эквивалентная в динамическом отношении расчетной схеме, показанной на фиг. 2.
Сущность устройства заключается в следующем.
Система представляет собой твердое тело с массоинерционными параметрами М, J, опирающееся на упругие элементы с жесткостями k1 и k2. Точки крепления пружин удалены от центра тяжести (т. О) на расстояние l1 и l2 соответственно. В тт. А и В на рабочем органе 1 произведено закрепление динамического гасителя, закрепленного на каретке 18 (фиг.1, б) с возможностью перемещения посредством электропривода 12 и ходового винта 17. Вибратор 15 передает гармонические колебания заданной частоты на рабочий орган 1. Посредством датчиков 13, 14 считываются данные о состоянии вибрационного поля.
Основным назначением технологических машин является формирование процессов подбрасывания частиц различных сыпучих сред. Оптимальным режимом в этом случае будет равномерное гармоническое вибрационное воздействие по всей длине рабочего органа. Для достижения такого режима необходимо соблюдение условия, когда вращательное движения рабочего органа относительно центра тяжести нивелируется или минимизируется до приемлемых значений. Такой результат может быть получен в том случае, когда соотношение координат у2 к у1 будет равно или стремиться к единице. А так как масса рабочего органа варьируется в зависимости от объема и типа рабочей среды, то возникает необходимость настройки вибрационного поля для соблюдения требуемого соотношения
между координатами движения. Применительно к данной схеме технологической машины настройка будет осуществляться при помощи изменения параметров динамического гасителя колебаний.
При необходимости корректировки параметров работы вибрационной технологической машины через блок управления 10 при помощи преобразователя 11 подается сигнал о перемещении динамического гасителя колебаний, состоящего из дополнительной массы 2, упругого элемента 5 и рычажного механизма 7, вдоль рабочего органа 1. Также путем пригруза может быть изменено значение дополнительной массы m0. Теоретическое обоснование приведено в приложении 1.
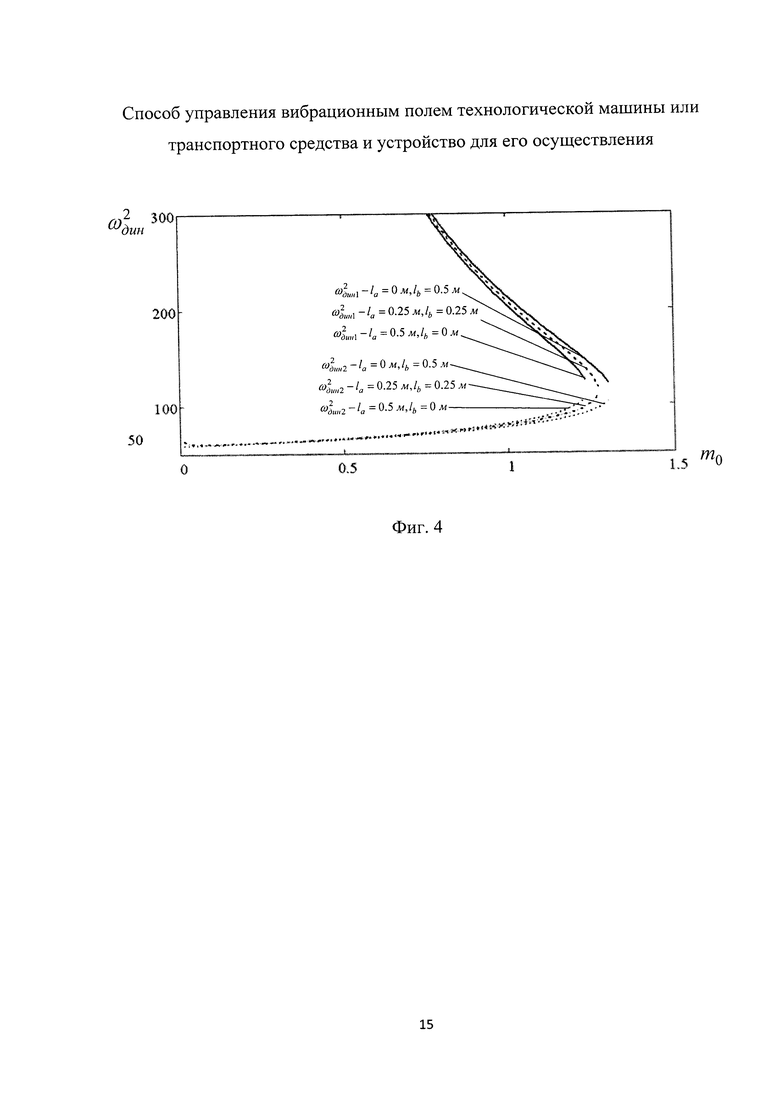
На фиг. 4 показано семейство графиков частотных диаграмм системы при соблюдении условия  построенных на основе теоретического обоснования, когда значение дополнительной массы т0 изменяется от 0 до 20 кг при сочетании lа и lb: la=0 м; lb=0.5 м, lа=0.25 м; lb=0.25 м, lа=0.5 м; lb=0.0, а также при в диапазоне от 0 до 20 кг. Остальные параметры имеют следующие значения: М=30 кг; J=20 кг⋅м2; k1=1000 Н/м; k2=1000 Н/м; m0=5 кг; l1=0.5 м; l2=0.5 м).
построенных на основе теоретического обоснования, когда значение дополнительной массы т0 изменяется от 0 до 20 кг при сочетании lа и lb: la=0 м; lb=0.5 м, lа=0.25 м; lb=0.25 м, lа=0.5 м; lb=0.0, а также при в диапазоне от 0 до 20 кг. Остальные параметры имеют следующие значения: М=30 кг; J=20 кг⋅м2; k1=1000 Н/м; k2=1000 Н/м; m0=5 кг; l1=0.5 м; l2=0.5 м).
Таким образом, способ позволяет управлять динамическим состоянием вибрационной машины при помощи динамического корректора на основе изменения его параметров, что доказывается графиками частотных диаграмм. Эффект может быть достигнут при помощи изменения координат закрепления и значения дополнительной массы, Предложены соотношения, позволяющие создавать требуемые режимы работы технологической машины вплоть до получения однородного вибрационного поля.
Список использованных источников
1. Елисеев С.В., Резник Ю.И., Хоменко А.П., Засядко А.А. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов. - Иркутск: ИГУ. 2008. - 523 с.
2. Тимошенко С.П., Янг Д.Х., Уивер У. Теория колебаний в инженерном деле / Пер. с англ. Л.Г. Корнейчука; Под. ред. Э.И. Григолюка - М.: Машиностроение, 1985. - 472 с.
3. De Silva, Clarence W. (eds.) Vibration and Shock Handbook. N.-Y.: Taylor&Francis, 2005. - 1872 p.
4. Быховский И.И. Основы теории вибрационной техники. М.: Машиностроение, 1968. - 362 с.
5. Фролов К.В., Фурман Ф.А. Прикладная теория виброзащитных систем. - М.: Машиностроение, 1985. - 286 с.
6. Пановко Г.Я. Лекции по основам теории вибрационных машин и технологий. М.: МГТУ им. Баумана, 2008. - 192 с.
7. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
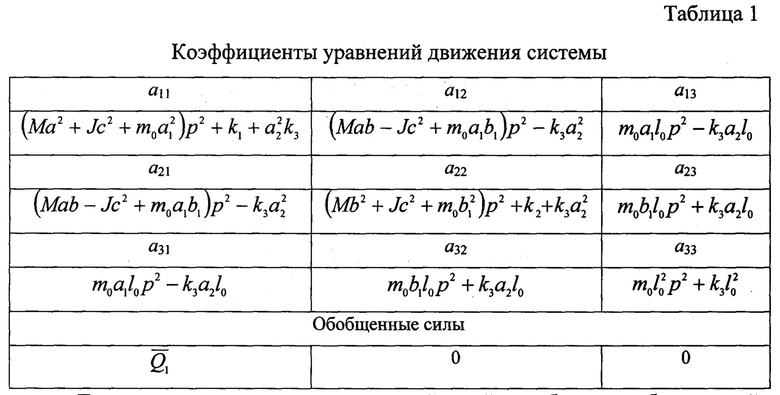
Теоретическое обоснование После анализа расчетной схемы на фиг.1 и нахождения уравнений кинетической и потенциальной энергий, на основе которых строятся дифференциальные уравнения движения системы, производится переход из временной области в область изображений Лапласа (р=jω является комплексной переменной) [1]. Коэффициенты уравнений движения в изображениях Лапласа приведены в таблице 1 с учетом дополнительных соотношений
Для получения режимов устойчивой работы вибрационной технологической машины необходимо, чтобы соотношения координат движения системы у2 и у1 стремилось в единице, что позволит исключить угловые колебания рабочего органа. Выражения для оценки динамического состояния вибрационного поля можно получить при помощи использования формул Крамера [4, 5]. Передаточные функции (2) и (3) иллюстрируют
изменение координат движения у1 и у2 соответственно при силовом внешнем возмущении Q1, генерируемом вибратором 15:


После деления выражения (3) на выражения (2), получим

После преобразований приведем выражения к виду

После подстановки соответствующих коэффициентов из табл. 1 полученное выражение примет вид биквадратного уравнения

где
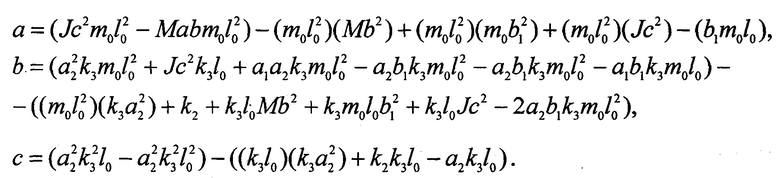
После перехода к частотному диапазону с использованием замены р2 на -ω2 получим следующее выражение

Анализ выражения (7) показывает, что его нулевые значения будут обеспечивать необходимое соотношение у2 к у1, равное единице, что позволяет выделить зависимость  от изменения m0 и от соотношения длин lа и lb
от изменения m0 и от соотношения длин lа и lb

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| Устройство формирования вибрационного поля технологической машины и способ для его реализации | 2023 |
|
RU2818983C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
Изобретение относится к области машиностроения. Устройство управления выполнено в виде системы контроля над параметрами вибрационного поля с подвижным устройством уменьшения колебаний. На рабочем органе технологической машины установлен управляемый динамический гаситель колебаний. Гаситель колебаний выполнен в виде рычажного механизма. Рычажный механизм с одного конца жестко прикреплен к рабочему органу, а с другого содержит на конце дополнительную массу и прикреплен через упругий элемент. Перемещение осуществляется посредством управляющего блока в каретке. Каретка выполнена в виде ласточкина хвоста. Достигается расширение арсенала технических средств. 4 ил.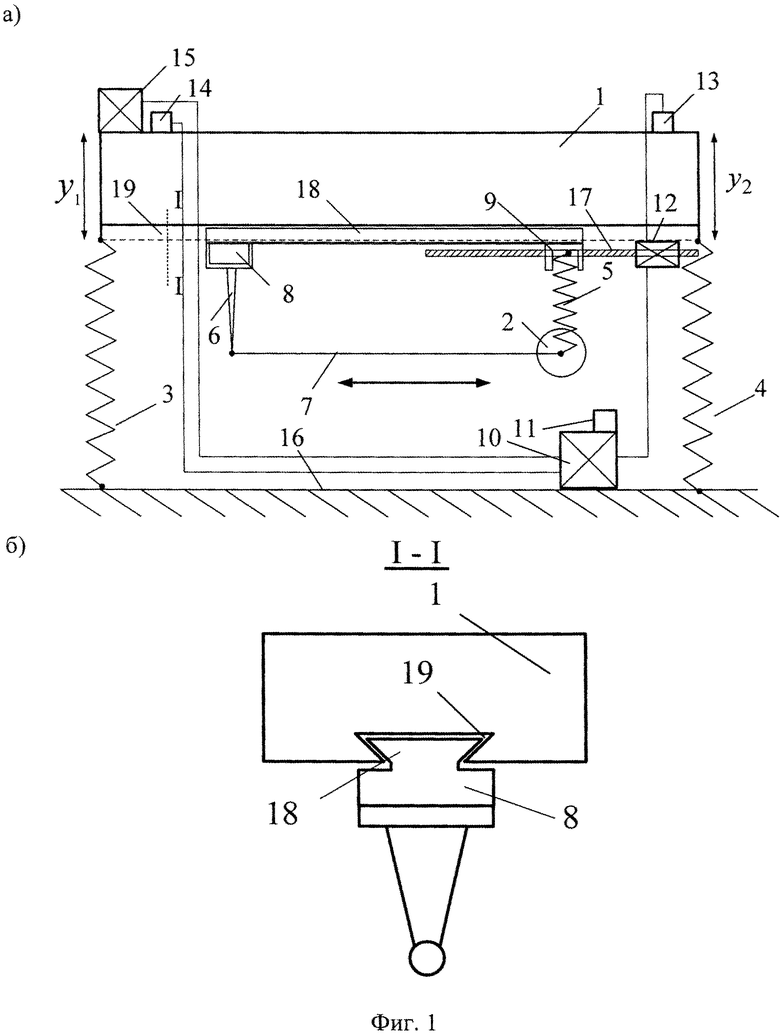
Устройство управления вибрационным полем технологической машины или транспортного средства, представляющее собой систему контроля над параметрами вибрационного поля с подвижным устройством уменьшения колебаний, отличающееся тем, что на рабочем органе технологической машины установлен управляемый динамический гаситель колебаний, представляющий собой рычажный механизм, с одного конца жестко прикрепленный к рабочему органу, а с другого имеющий на конце дополнительную массу и прикрепленный через упругий элемент, и его перемещение осуществляется при помощи управляющего блока в каретке, представляющей собой ласточкин хвост.
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

