1
Изобретение относится к машиностроению, в частности к устройствам для преобразования равномерного враа1,ательного движения в неравномерное вращательное, и является усовершенствованием известного механизма по авт. св. № 1191658.
Цель изобретения - повышение КПД механизма путем снижения потерь па тре- пие между пальцами и кулачком.
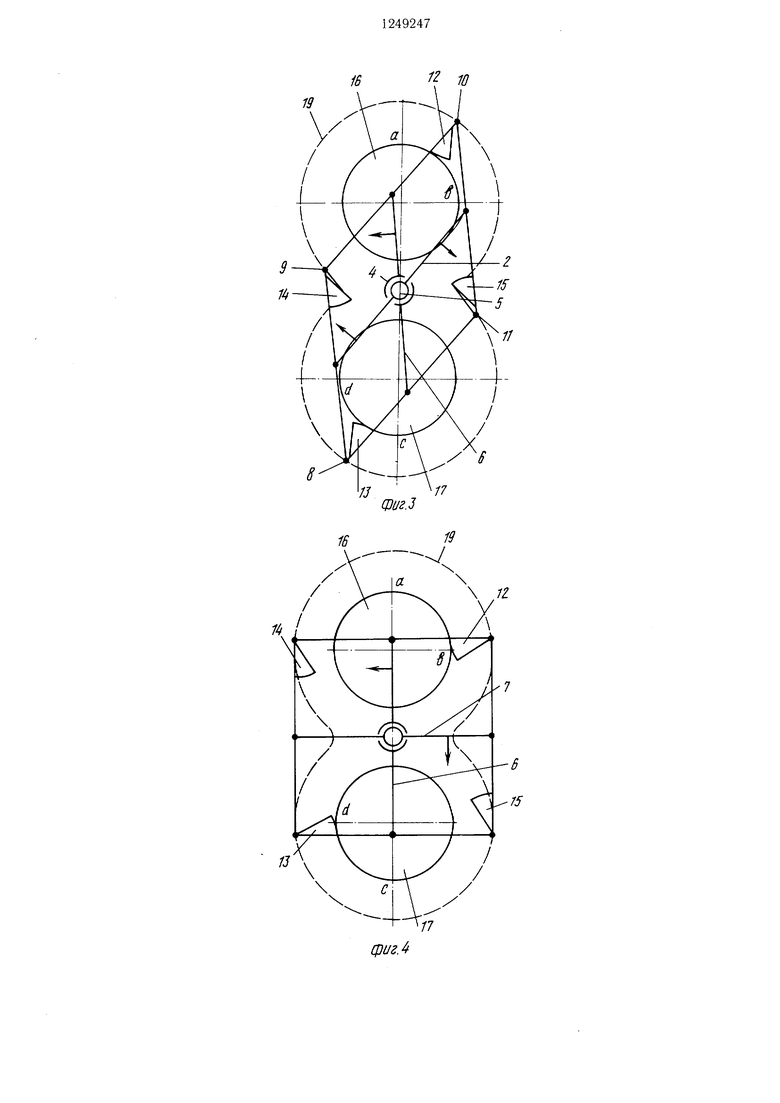
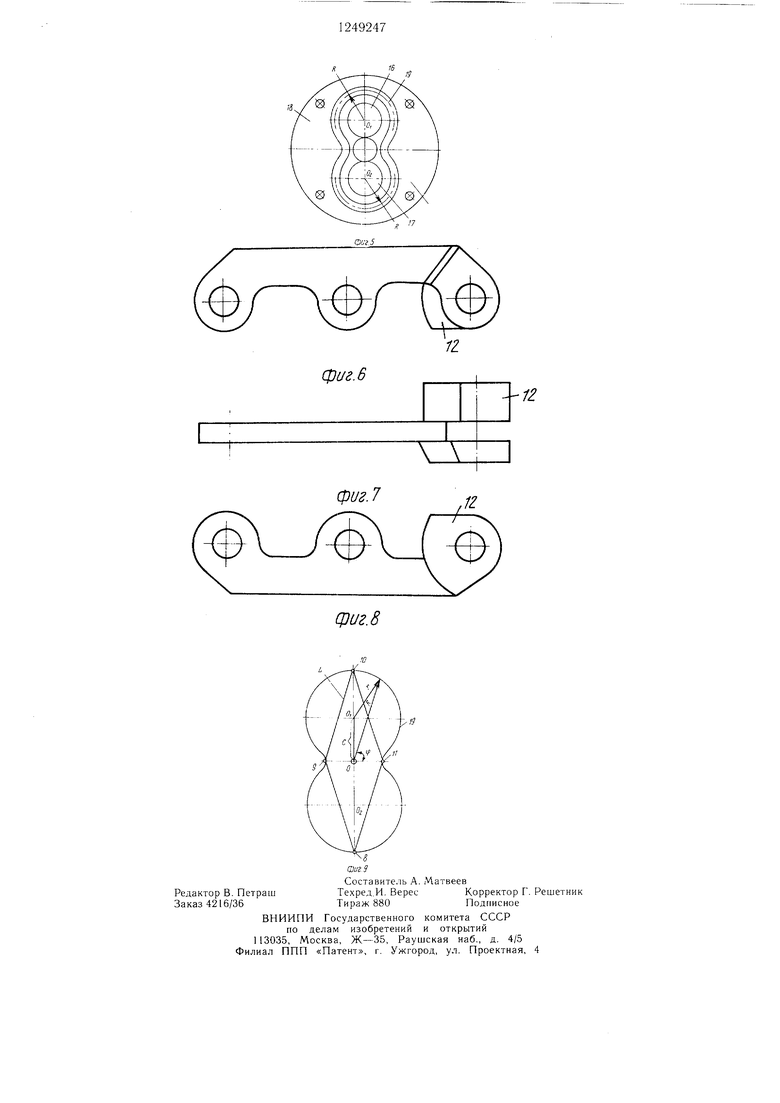
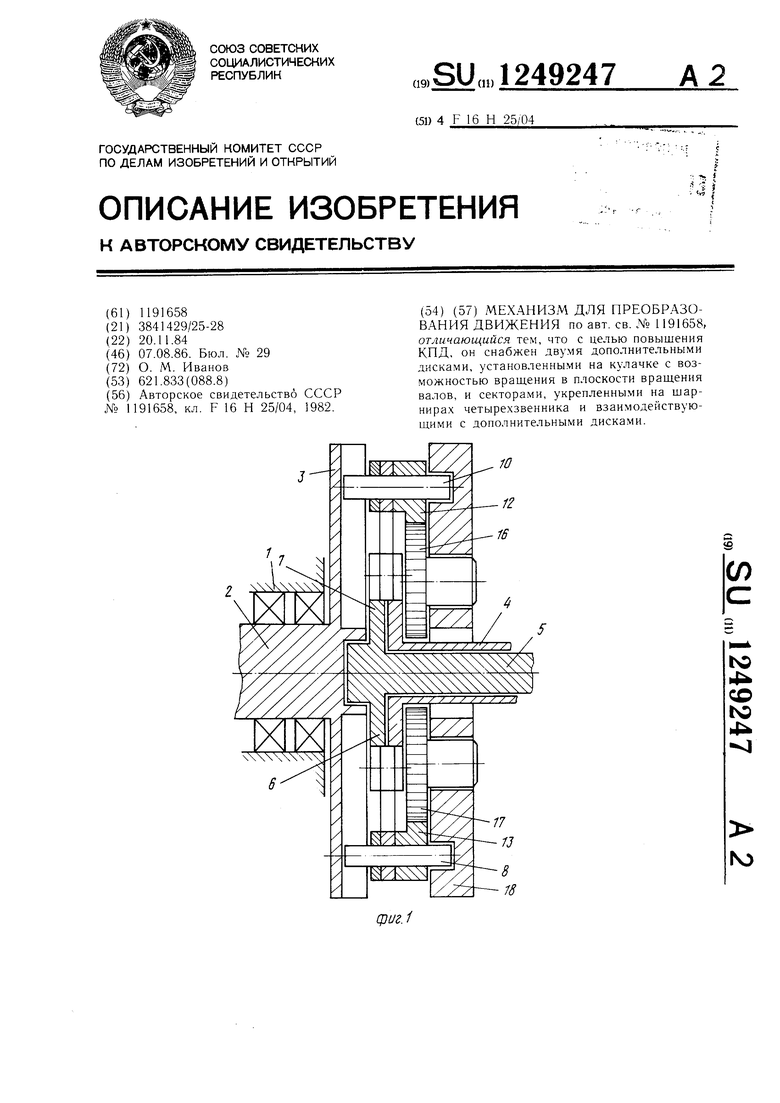
На фиг. 1 изображен механизм, общий вид; па фиг. 2 - то же, вид со стороны диска с направляюп1ими; на фиг. 3 и 4 - - схемы работы механизма; па фиг. 5 -- пазовый кулачок с дисками; на фиг. 6-8 - элемент шарнирного четырехзвенника с сектором; на фиг. 9 - схема параметров кривой пазового кулачка.
R C-sin:f-fV CcosV ; 90° f 45
Механизм состоит из корпуса 1 (фиг. 1), вала 2, диска 3 с иаг1равляюн1ими, коаксиальных валов 4 и 5. На Ba;iy 4 жестко установлен двуплечий рычаг 6, а на валу 5 - двуплечий рычаг 7. Рычаги 5 и 6 соединены своими концами с серединами шар- пирного четырехзвенника (фиг. 2-4), в вершинах которого устаповлепы пальцы 8- 11. На элементах шарнирного четырехзвен- ника выполнены секторы 12-15, которые взаимодействуют с дисками 16 и 17, установленными в неподвижный пазовый кулачок 18 с пазом 19.
Форма кривой назовог о кулачка описывается уравнениями
е
-( С - соS stH) ;
Я-радиус полярной координаты; г-радиус кругового участка; С -расстояние между центром системы и центром кругового участка;
ю 19 6
1249247
Q
5
0
5
5
и-длина элемента щарнирного четырехзвенника;
:f- угол между горизонтальной осью и радиусом.
Форма кривой паза кулачка имеет два круговых участка с центрами в точках О и Ог (фиг. 5). В центрах этих круговых участков установлены диски 16 и 17 с воз-, можпоетью свободного вращения вокруг своей оси.
Механизм работает следующим образом.
При приложении к валу 2 вращающего момента пальцы 8-11 щарнирного четырехзвенника под действием диска 3 начинают обкатываться по пазу 19 кулачка 18. Секторы 12-15, жестко установленные на элементах шарнирного четырехзвенника (фиг. 3 и 4), движутся вместе с дисками 16 и 17 от точки а до точки б и от с до d.
На фиг. 3 изображено как сектор 12, коснувшись диска 16, движется вместе с пим по часовой стрелке от точки а до б, а поскольку схема четырехзвенника сим- .метричная, то сектор 13 движется вместе с диском 17 от точки с до d.
После прохождения секторами 12 и 13 точек b и d (фиг. 4) секторы отходят от дисков (т.е. не касаются их поверхности) и, двигаясь далее, плавно подходят к дискам 16 и 17 и опираются на пих в точках а и с.
Половину пути по кривой кулачка пальцы 8-11 не испытывают трения о паз кулачка. Здесь трение пальцев о кулачок заменено трением осей дисков 16 и 17 в своих опорах (они могут быть и шарикоподшипниковыми).
В момент движения секторов 12 и 13 в.месте с дисками 16 и 17 (фиг. 3) вторая пара пальцев 9 и 11 вообще может не касаться кулачка, т.е. двигаться по воздуху.
Таким образом, в предлагаемом механизме снижаются потери на трение между пальцами четырехзвенника и кулачком и, следовательно, повышается КПД механизма.
/7
7
15
0
19
/ 10
/JV7
фиг.З
/
фиг. 6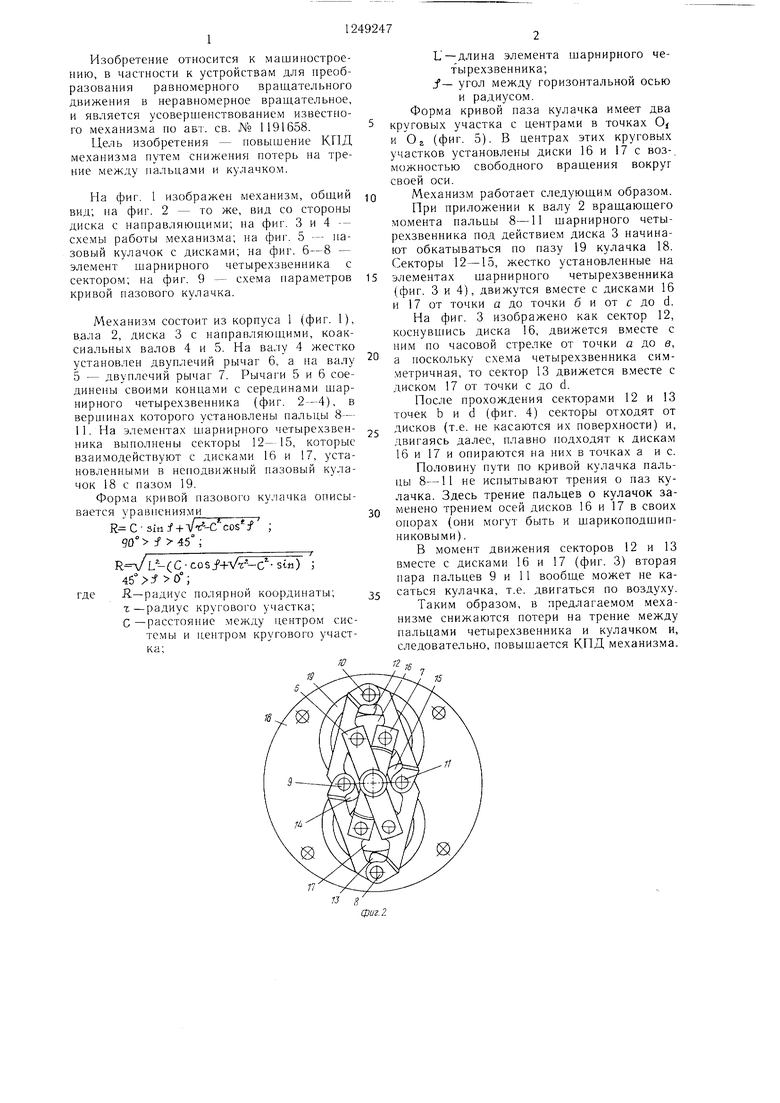
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU294416A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1974 |
|
SU560731A1 |
| Насос | 1985 |
|
SU1343101A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1999 |
|
RU2207464C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 2008 |
|
RU2387844C2 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| Устройство для раскладки нити | 1988 |
|
SU1615120A1 |
| Механизм для преобразования движения | 1984 |
|
SU1191658A1 |
| ТРЕХКОЛЕСНЫЙ ВЕЛОСИПЕД ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ | 1995 |
|
RU2087367C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2013 |
|
RU2531854C2 |
фиг.7
ери г. 8
Редактор В. Петраш Заказ 4216/36
ФигЗ
Составитель А. Матвеев
Техред.И. ВересКорректор Г. Ре
Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, , Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Механизм для преобразования движения | 1984 |
|
SU1191658A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
