Изобретение относится к машиностроению и, в частности, к шарнирно-рычажным механизмам и может найти применение во вращательных приводах машин, вибросмесителях и строительных конструкциях.
Известен кривошипно-коромысловый механизм, в котором все 4 рычажных звена выполнены разной длины, при этом звено наибольшей длины выполнено в виде рычажного шатуна ВС, а звено наименьшей длины выполнено в виде ведущего кривошипа АВ, который посредством шатуна шарнирно соединен с ведомым коромыслом CD (книга Вульфсон И.И. идр. Механика машин: Учеб. Пособие для втузов. - М.: Высшая школа, 1996, с. 114, рис. 3.5, схема синтезированного кривошипно-коромыслового четырехзвенника с амплитудой угла колебаний ведомого коромысла CD, на рис. 3.5 равной ψmin = 70 градусов) - аналог.
Недостатками известного механизма являются:
1) Малая амплитуда колебаний ведомого коромысла (ψmin) с установленным на нем рабочим органом при больших габаритах рычажных звеньев (ϕmin = 70° << 360°).
2) Ограниченное малой амплитудой колебаний коромысла (ϕmin = 70°) рабочее пространство и область функционирования данного механизма.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является четырехзвенный шарнирный кривошипно-коромысловый механизм, в котором смежных между собой рычажные звенья в виде стойки AD и коромысла CD, а также два других смежные между собой звенья ведущего кривошипа АВ и шатуна ВС выполнены попарно одинаковой длины) книга Крайнев А.Ф. Словарь-справочник по механизмам. - М.: «Машиностроение», 1987, стр. 181, схема в)) - прототип.
Недостатками указанного кривошипно-коромыслового механизма являются:
1) Малая амплитуда колебаний ведомого коромысла с рабочим органом (для указанной на стр. 181 схемы это (ϕmin = 70°) при больших габаритах механизма.
2) При совмещении между собой при их вращении одинаковых по длине кривошипа АВ с шатуном ВС (АВ=ВС) механизм становится полностью неработоспособным из-за возникающих при этом неуправляемых мертвых положений ведомого коромысла (так как при дальнейшем совместном вращении вокруг оси А кривошипа АВ и шатуна ВС, как одного звена - ведомое коромысло блокируется с неподвижной стойкой AD и тоже становится полностью неподвижным).
3) Малая амплитуда колебаний ведомого коромысла CD ((ϕmin =70°) ограничивает рабочее пространство и область возможного функционирования данного кривошипно-коромыслового механизма (в пределах ((ϕmin = 70°), что составляет всего 70°/360° = 20% от полного пространства поворота рабочего органа на 360 градусов.
В основу изобретения положена техническая задача, заключающаяся в следующем:
1. Увеличение амплитуды колебаний ведомого кривошипа для расширения рабочего пространства и области функционирования кривошипно-коромыслового механизма.
2. Снижение габаритов кривошипно-коромыслового механизма в его сложенном положении за счет расположения всех звеньев по прямой без разборки цепи механизма.
3. Исключении во всем расширенном диапазоне рабочего пространства кривошипно-коромыслового механизма ((ϕmax = 140°) неуправляемых мертвых положений ведомого коромысла.
Получение технического результата достигается за счет того, что в замкнутой кинематической цепи шарнирного четырехзвенника, содержащего стойку, ведущий кривошип, шатун и ведомое коромысла в виде двух пар противоположно расположенных между собой рычажных звеньев, из которых одна пара противоположно расположенных рычажных звеньев выполнена одинаковой длины, другая пара противоположно расположенных рычажных звеньев выполнена разной длины, при этом длина наибольшего звена кривошипно-коромыслового механизма равна сумме длин кривошипа и одного из смежных с ним звеньев шатуна или стойки механизма, а ведомое коромысло дополнительно соединено со стойкой посредством упругого элемента кручения, выполненного, например, в виде соосного с коромыслом торсионного вала или винтовой пружины.
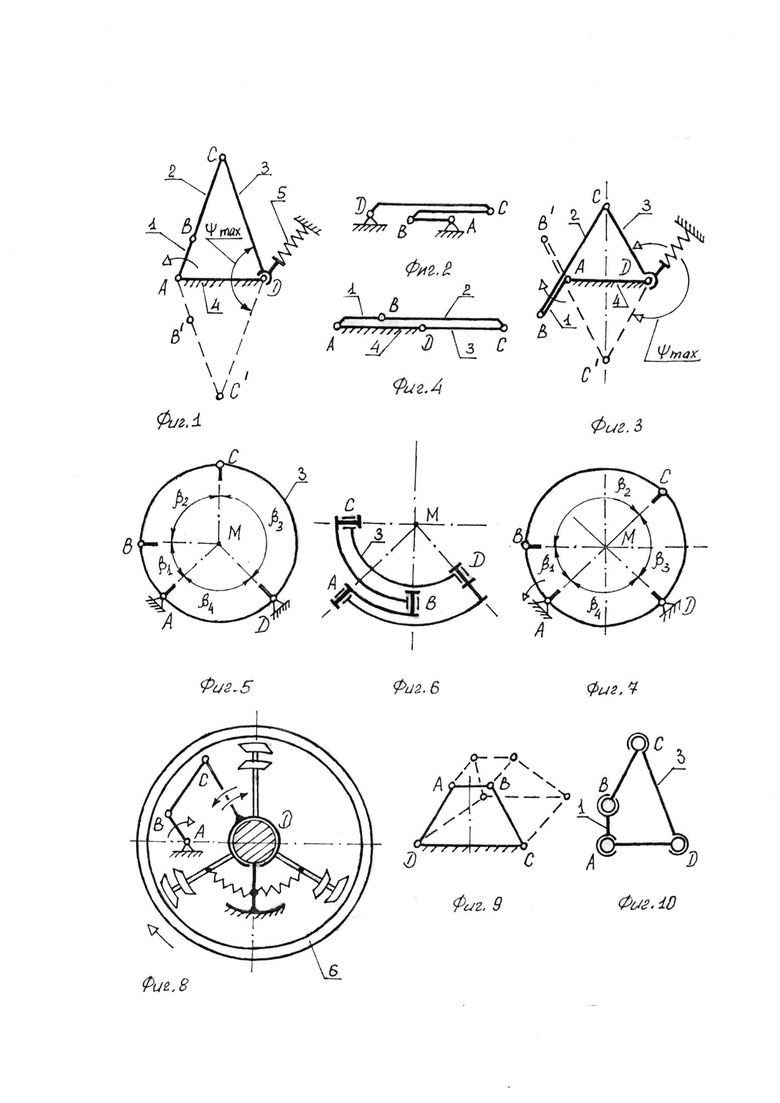
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8, фиг. 9, фиг. 10.
На фиг. 1 и фиг. 2 изображен общий вид складывающегося многократного кривошипно-коромыслового механизма, выполненного в виде шарнирного четырехзвенника ABCD, в котором два противоположных звена 2 и 4 выполнены одинаковой длины (l2 = ВС) = (l4 = AD), а два других противоположных звена 1 и 3 выполнены разной длины (l3 = CD) = (l1 = АВ) и образуют после их сборки в замкнутую кинематическую плоскую цепь ведущий кривошип 1, шатун 2, ведомое коромысла 3 и стойку 4.
Ведомое коромысло 3 дополнительно соединено со стойкой 4 посредством упругого элемента кручения 5 в виде соосного с ведомым коромыслом 3 торсионного вала или винтовой пружины. При этом два противоположных звена в виде стойки 4 и шатуна 2 выполнены одинаковой длины, два других противоположных звена в этой кинематической цепи четырехзвенника ABCD выполнены разной длины в виде ведущего кривошипа 1 и ведомого коромысла 3, а оси всех цилиндрических шарниров А, В, С и D выполнены параллельными для движения коромысла 3 с рабочим органом в заданной плоскости. На фиг. 1 представлено разложенное положение механизма с амплитудой угловых колебаний ведомого коромысла 3, равной ϕmax между его крайними положениями С и С', а на фиг. 2 представлен механизм в компактном сложенном положении без разборки его цепи.
В кинематической схеме механизма на фиг. 1 и фиг. 2 длина l2 шатуна 2, равная длине l4 стойки 4 (l2 = l4), равна двукратной длине ведущего кривошипа l1 (l2 - l4 = 2l1), а длина ведомого коромысла l3 равна трехкратной длине ведущего кривошипа (l3 = l1 +l2 = 3l1). Выполнение длин звеньев 1, 2, 3 и 4 (равных расстоянию между осями шарниров на этих звеньях l1 = АВ, l2 = ВС, l3 = CD, l4 = DA) согласно указанным кратным отношениям (1):

обеспечивает образование складывающегося плоского кривошипно-коромыслового механизма с представленной на фиг. 1 с увеличенной амплитудой угловых колебаний ведомого коромысла 3, равной ϕmax = 140°.
На фиг. 3 и фиг. 4 представлен вариант выполнения складывающегося многократного кривошипно-коромыслового механизма, в замкнутой кинематической цепи которого два смежных звена в виде стойки 4 и коромысла 3 выполнены одинаковой длины (l3 = l4), а два других смежных звена в виде кривошипа 1 и шатуна 2 выполнены разной длины (l2 ≠ l4), при этом оси всех цилиндрических шарниров параллельны между собой.
На фиг. 3 механизм представлен в разложенном положении с амплитудой угловых колебаний ведомого коромысла 3, равной (ϕmax между его крайними положениями С и С', а на фиг. 4 представлен механизм в компактном сложенном положении без разборки его цепи. В кинематической схеме механизма на фиг. 3 и фиг. 4 длина (l3) ведомого коромысла 3 равна двукратной длине ведущего кривошипа l1(l3 = 2l1), длина стойки (l4) тоже равна двукратной длине ведущего кривошипа (l4 = 2l1), а длина (l2) шатуна равна трехкратной длине ведущего кривошипа, для образования складывающегося плоского кривошипно-коромыслового механизма с увеличенной амплитудой угловых колебаний, равной ϕmax = 240° при выполнении следующих кратных соотношений (2):

На фиг. 5 и фиг. 6 представлен вариант выполнения складывающегося сферического многократного кривошипно-коромыслового механизма с движением рабочего органа на коромысле 3 по сферической поверхности, центр кривизны которой совпадает с опцией точкой М пересечения осей цилиндрических шарниров А, В, С и D. Для выполнения ϕmax = 140° при следующих кратных соотношений (3) между центральными углами кривошипа (β1), шатуна (β2), коромысла (β3), и стойки (β4):

Все рычажные звенья шарнирного четырехзвенника ABCD выполнены в виде радиально изогнутых рычагов, центр радиуса изгиба которых совпадает с общей точкой М пересечения осей всех цилиндрических шарниров А, В, С и D.
На фиг. 5 сферический кривошипно-коромысловый механизм представлен в разложенном положении, а на фиг. 6 - в компактном сложенном.
На фиг. 7 представлен вариант выполнения сферического кривошипно-коромыслового складывающегося механизма с ϕmax = 240°, реализующего кратные соотношения (4):

На фиг. 8 представлен вариант выполнения на основе складывающегося механизма с ϕmax = 140° (изображенного на фиг. 1) пространственного шарнирного вибросмесителя, в котором месильная емкость 6 выполнена с возможностью вращения от отдельного вращательного реверсивного двигателя с регулируемыми оборотами.
На фиг. 9 представлен вариант выполнения шарнирного четырехзвенника ABCD с соотношением (1) между длинами его рычажных звеньев, в котором звено наибольшей длины l4 = DC выполнено в виде неподвижной стойки, для образования складывающегося шарнирного каркаса стены строительной балки в виде симметричной усеченной пирамиды (показана пунктиром).
На фиг. 10 представлен вариант выполнения шарнирного четырехзвенника ABCD с соотношением (1) между длинами его рычажных звеньев, в котором все подвижные соединения стойки, кривошипа, шатуна и коромысла между собой выполнены в виде сферический шарниров, для образования складывающегося пространственного механизма, в котором ведущий кривошип 1 и ведомое коромысло 3 выполнены с возможностью их углового поворота вокруг каждой из трех координатных осей х, у и z.
Работа представленного складывающегося многократного кривошипно-коромыслового механизма заключается в следующим.
Вращение ведущего кривошипа с постоянной угловой скоростью преобразуется в угловые колебания ведомого коромысла и установленного на нем рабочего органа с увеличенной амплитудой ϕmax = 140° (в схеме на фиг. 1) или ϕmax = 240° (в схеме на фиг. 3). Установка в кривошипно-коромысловом механизме торсионного вала или винтовой пружины между ведомым коромыслом и стойкой обеспечивает плавный переход из одного крайнего положения механизма в другое без возникновения в нем неуправляемых мертвых положений ведомого коромысла с рабочим органом.
Выполнение длин всех звеньев шарнирного четырехзвенника согласно многократным соотношениям (1) или (2), (3) или (4) дает возможность складывания всех четырех рычажных звеньев по прямой (фиг. 2, фиг. 4) ИЛИ по окружности (фиг. 6) без разборки всей замкнутой кинематической цепи механизма, что обеспечивает компактность кривошипно-коромыслового плоского и пространственного рычажных механизмов в их сложенном положении.
Достигаемый технический эффект заключается в увеличении в 2-3 раза рабочего пространства и области функционирования кривошипно-коромыслового механизма, исключении неуправляемых мертвых положений, компактности в сложенном положении без разборки кинематической цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| РЕГУЛИРУЕМЫЙ ЗУБЧАТО-РЫЧАЖНЫЙ ПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 2010 |
|
RU2440526C1 |
Изобретение относится к машиностроению. Складывающийся многократный кривошипно-коромысловый механизм выполнен в виде шарнирного четырехзвенника, составленного из четырех шарнирно-соединенных между собой рычажных звеньев, образующих, после их сборки в замкнутую кинематическую цепь, стойку, ведущий кривошип, шатун и ведомое коромысло. Два рычажных звена из этой цепи выполнены одинаковой длины и соединены непосредственно между собой через шарнир или кинематически взаимосвязаны посредством другого рычажного звена. Два других рычажных звена выполнены разной длины. Ведомое коромысло дополнительно соединено со стойкой посредством упругого элемента кручения, выполненного в виде соосного с ведомым коромыслом торсионного вала или винтовой пружины. Достигается увеличение амплитуды угловых колебаний ведомого коромысла с рабочим органом и расширение рабочего пространства. 7 з.п. ф-лы, 10 ил.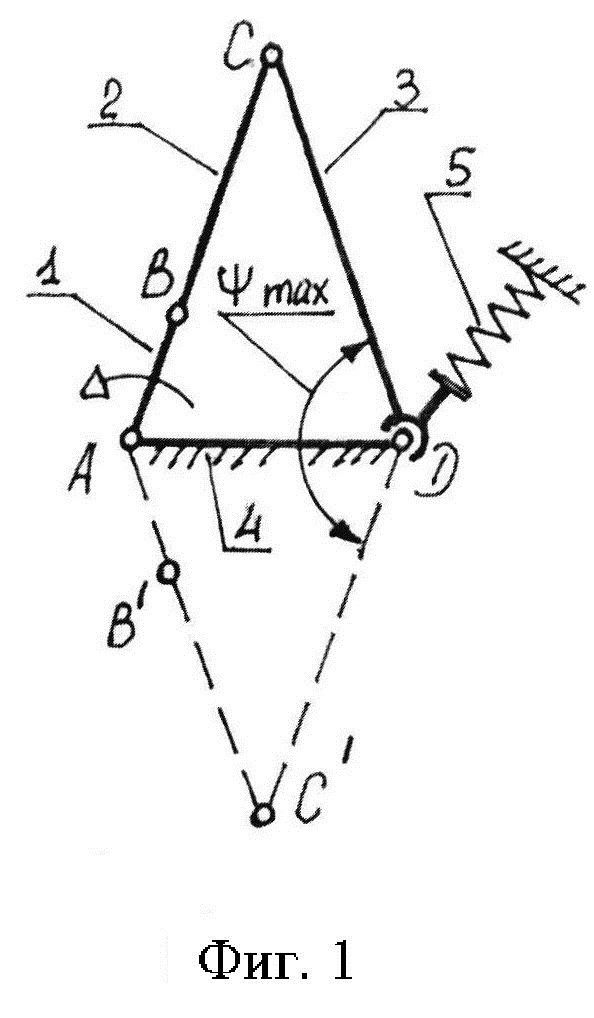
1. Складывающийся многократный кривошипно-коромысловый механизм, выполненный в виде шарнирного четырехзвенника, составленного из четырех шарнирно-соединенных между собой рычажных звеньев, образующих, после их сборки в замкнутую кинематическую цепь, стойку, ведущий кривошип, шатун и ведомое коромысло, отличающийся тем, что два рычажных звена из этой цепи выполнены одинаковой длины и соединены непосредственно между собой через шарнир или кинематически взаимосвязаны посредством другого рычажного звена, два других рычажных звена выполнены разной длины, а ведомое коромысло дополнительно соединено со стойкой посредством упругого элемента кручения, выполненного, например, в виде соосного с ведомым коромыслом торсионного вала или винтовой пружины.
2. Кривошипно-коромысловый механизм по п. 1, отличающийся тем, что длина стойки l4 равна двухкратной длине ведущего кривошипа l1, длина шатуна l2 равна длине стойки, а длина ведомого коромысла l3 равна трехкратной длине ведущего кривошипа для образования складывающегося плоского кривошипно-коромыслового механизма с увеличенной амплитудой угловых колебаний ведомого коромысла, например, равной Ψmax=140 градусов, при выполнении следующих кратных соотношений (1):
l2 = l4 = 2l1; l3 = l1 + l2 = 3l1. (1)
3. Кривошипно-коромысловый механизм по п. 1, отличающийся тем, что длина ведомого коромысла l3 равна двухкратной длине ведущего кривошипа l1, длина стойки l4 тоже равна двухкратной длине ведущего кривошипа, а длина шатуна l2 равна трехкратной длине ведущего кривошипа l1 для образования складывающегося плоского кривошипно-коромыслового механизма с увеличенной амплитудой угловых колебаний ведомого коромысла, например, равной Ψmax=240 градусов, при выполнении следующих кратных соотношений (2):
l3 = l4; l2 = 3l1; l3 = 2l1; l4 = 2l1. (2)
4. Кривошипно-коромысловый механизм по п. 1, отличающийся тем, что подвижные соединения рычажных звеньев четырехзвенника выполнены в виде цилиндрических шарниров с параллельными между собой осями вращения для образования складывающегося шарнирного механизма с движением ведомого коромысла с рабочим органом в одной заданной плоскости.
5. Кривошипно-коромысловый механизм по п. 1, отличающийся тем, что подвижные соединения рычажных звеньев четырехзвенника выполнены в виде цилиндрических шарниров с пересекающимися в одной точке осями вращения для образования складывающегося сферического механизма с движением установленного на ведомом коромысле рабочего органа по сферической поверхности, центр кривизны которой совпадает с общей точкой пересечения осей всех упомянутых шарниров при выполнении одного из следующих кратных соотношений (3) или (4) между центральными углами кривошипа β1, шатуна β2, коромысла β3 и стойки β4:
β1 = 45°; β2 = β4 = 2β1 = 90°; β3 = 3β1 = 135°, (3)
β1 = 45°; β3 = β4 = 2β1 = 90°; β2 = 3β1 = 135°. (4)
6. Кривошипно-коромысловый механизм по п. 5. отличающийся тем, что все рычажные звенья шарнирного четырехзвенника выполнены в виде радиально изогнутых рычагов, центр радиусов изгиба которых совпадает с общей точкой пересечения осей всех цилиндрических шарниров складывающегося рычажного механизма.
7. Кривошипно-коромысловый механизм по пп. 2-4, отличающийся тем, что ведомое коромысло выполнено с возможностью установки на него месильного органа для образования шарнирного пространственного вибросмесителя, в котором месильная емкость выполнена с возможностью вращения от отдельного вращательного реверсивного двигателя с регулируемыми оборотами.
8. Кривошипно-коромысловый механизм по п. 2, отличающийся тем, что все подвижные соединения стойки, кривошипа, шатуна и коромысла между собой выполнены в виде сферических шарниров для образования складывающегося пространственного механизма, в котором ведущий кривошип и ведомое коромысло выполнены с возможностью их углового поворота вокруг каждой из трех координатных осей x, y и z.
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ | 1973 |
|
SU526210A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| Двухколесный ножной велосипед | 1934 |
|
SU44441A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |

