Область техники, к которой относится изобретение
Изобретение относится к машиностроению и может быть использовано в роторных механизмах на электромагнитных опорах.
Уровень техники
Наиболее близким по технической сущности является система управления электромагнитным подвесом ротора (см. патент Российской Федерации № 2395150, опубл. 20.07.2010, Бюл. № 20), в которой каждый канал системы управления содержит датчик положения ротора, интегральный регулятор, пропорциональный регулятор, дифференцирующее звено, пропорционально-дифференциальный регулятор, силовой преобразователь и два электромагнита.
Недостатком наиболее близкой системы управления электромагнитным подвесом ротора является малые функциональные возможности. Это определяется тем, что в устройстве, взятом за прототип, применяется зависимое управления токами противоположных магнитов, когда увеличение тока в одном электромагните на определенную величину приводит к снижению тока в противоположном электромагните на такую же величину. При этом параметры регуляторов выбираются для центрального положения ротора относительно магнитной системы, когда индуктивности и, следовательно, инерционности электромагнитов одинаковы. Поэтому смещение ротора относительно центра магнитной системы приводит к снижению быстродействия и жесткости электромагнитных подшипников. С другой стороны, смещение ротора от центрального положения позволяет скомпенсировать действие силы веса ротора и уменьшить токи в электромагнитах, осуществляющих эту компенсацию. Таким образом, в устройстве, взятом за прототип, одновременное достижение большой динамической жесткости электромагнитных подшипников и снижение токов в электромагнитах, компенсирующих силу веса, проблематично.
Раскрытие сущности изобретения
Технический результат изобретения – обеспечение большого быстродействия и динамической жесткости электромагнитного подвеса ротора, снижение токов в электромагнитах, компенсирующих силу веса, и снижение потребляемой мощности.
Технический результат достигается тем, что в систему управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, первый и второй регуляторы, первый силовой преобразователь, первый и второй электромагниты, причем выход датчика положения ротора соединен с первыми входами первого и второго регуляторов, выход первого силового преобразователя соединен с обмоткой первого электромагнита, в каждый канал дополнительно введены второй силовой преобразователь и блок задания смещения, причем выход первого регулятора соединен с входом первого силового преобразователя, выход второго регулятора соединен с входом второго силового преобразователя, выход которого соединен с обмоткой второго электромагнита, а выход блока задания смещения соединен с вторыми входами первого и второго регуляторов.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет обеспечить большое быстродействие и динамическую жесткость электромагнитного подвеса ротора, снижение токов в электромагнитах, компенсирующих силу веса, и снижение потребляемой мощности.
Краткое описание чертежей
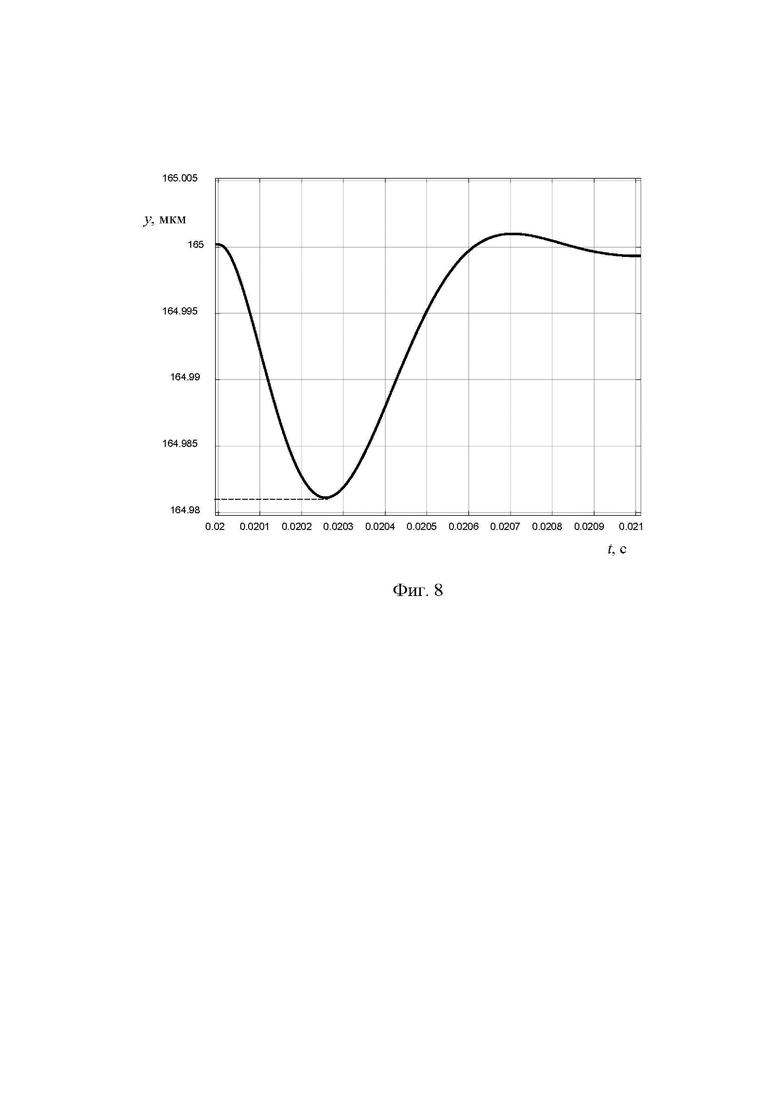
На фиг. 1 представлена функциональная схема каждого канала системы управления электромагнитным подвесом ротора; на фиг. 2 изображена принципиальная схема силового преобразователя; на фиг. 3 представлена возможная функциональная схема регулятора; на фиг. 4 приведена расчетная модель одного канала предлагаемой системы управления электромагнитным подвесом ротора; на фиг. 5 представлен график переходного процесса по управляющему воздействию в системе управления электромагнитным подвесом ротора при смещении ротора относительно центра магнитной системы при разных настройках регуляторов; на фиг. 6 представлен график переходного процессапо возмущающему воздействию в системе управления электромагнитным подвесом ротора при смещении ротора относительно центра магнитной системы при разных настройках регуляторов; на фиг. 7 представлен график переходного процесса по управляющему воздействию в системе управления электромагнитным подвесом ротора при смещении ротора относительно центра магнитной системы при одинаковых настройках регуляторов; на фиг. 8 представлен график переходного процесса по возмущающему воздействию в системе управления электромагнитным подвесом ротора при смещении ротора относительно центра магнитной системы при одинаковых настройках регуляторов.
Осуществление изобретения
Каждый канал системы управления (фиг. 1) содержит датчик положения ротора 1, первый и второй регуляторы 2 и 3, первый и второй силовые преобразователи 4 и 5, первый и второй электромагниты 6 и 7 и блок задания смещения 8. Датчик положения ротора 1 соединен с первыми (инверсными) входами первого и второго регуляторов 2 и 3. Выход первого регулятора 2 соединен с входом первого силового преобразователя 4, выход которого соединен с обмоткой первого электромагнита 6. Выход второго регулятора 3 соединен с входом второго силового преобразователя 5, выход которого соединен с обмоткой второго электромагнита 7. Выход блока задания смещения 8 соединен с вторыми (прямыми) входами первого и второго регуляторов2 и 3.
В качестве датчика положения ротора 1 может быть применен, например, индуктивный токовихревой датчик.
Каждый из регуляторов 2 и 3 могут быть представлены, например, совокупностью интегрального, пропорционального и пропорционально-дифференциального регуляторов и дифференцирующего звена с соответствующими связями (фиг. 2). Техническая реализация этих регуляторов осуществляется, например, на программируемом контроллере или микроконтроллере.
Каждый из силовых преобразователей 4 и 5, могут быть выполнены, например, по принципиальной схеме, приведенной на фиг. 3.Транзисторы VT1 и VT2, управляются, например, с помощью широтно-импульсного модулятора, подключенного к выходу одного из регуляторов.
Первый и второй электромагниты 6 и 7 располагаются на статоре роторной машины, например, на одной оси с противоположных сторон от ротора и могут быть выполнены, например, как явнополюсные или с распределенными обмотками. Обмотка каждого электромагнита подключаются к силовому преобразователю, например, как показано на фиг. 3.
Блок задания смещения 8, например, реализуется программно на контроллере или микроконтроллере, на котором выполнена система управления электромагнитным подвесом ротора.
Система управления электромагнитным подвесом ротора работает следующим образом. В каждом канале управления датчик положения ротора 1 измеряет отклонение ротора от центрального положения. Сигнал об измеренном отклонении подается на первые (инверсные) входы первого и второго регуляторов 2 и 3. Одновременно на вторые (прямые) входы первого и второго регуляторов 2 и 3 подается сигнал с блока задания смещения 8. Первый и второй регуляторы 2 и 3 находят разность сигналов, поступающих с блока задания смещения 8 и датчика положения ротора 1, и в соответствии с передаточными функциями, реализованными в этих регуляторах, подают сигналы на входы силовых преобразователей 4 и 5. Силовой преобразователь 4 регулирует напряжение и ток в электромагните 6, а силовой преобразователь 5 регулирует напряжение и ток в электромагните 7. В результате в обмотках электромагнитов 6 и 7 формируются такие токи, которые создают силу, выводящую ротор в положение, определяемое блоком задания смещения ротора 8.
Смещение ротора относительно центра магнитной системы позволяет скомпенсировать силу веса ротора при меньших токах в электромагнитах, работающих на подъем, за счет перераспределения зазоров между ротором и электромагнитами. Уменьшение токов в электромагнитах приводит к снижению потребляемой мощности силовыми преобразователями и электромагнитами. Однако смещение ротора относительно центра магнитной системы приводит к изменению индуктивностей и, следовательно, инерционности электромагнитов 6 и 7. В частности, в электромагните, находящемся ближе к пассивному магниту ротора, индуктивность и постоянная времени увеличивается, а в электромагните, находящемся дальше от пассивного магнита ротора, эти параметры уменьшается. Предлагаемая система управления электромагнитным подвесом ротора позволяет использовать различные настройки первого и второго регуляторов 2 и 3 и достигать большого быстродействия и динамической жесткости электромагнитного подвеса ротора при снижении токов в электромагнитах, компенсирующих силу веса, и снижение потребляемой мощности.
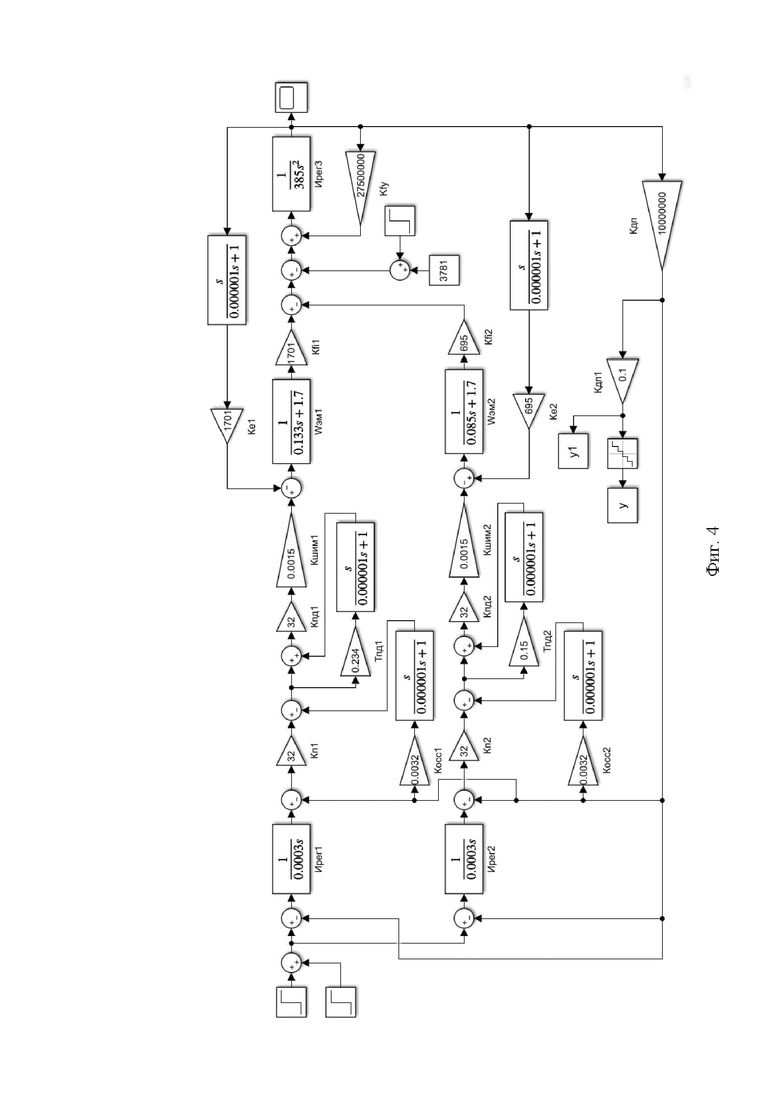
Действительно, расчетная модель (фиг. 4) одного канала предлагаемой системы управления применительно к радиальному электромагнитному подшипнику нагнетателя газоперекачивающего агрегата позволяет это доказать. Расчетная модель отражает линеаризованные уравнения движения ротора в поле электромагнитов
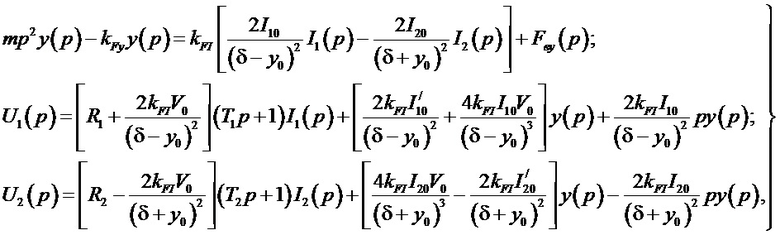
где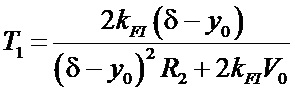 и
и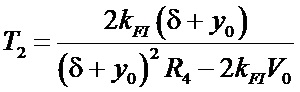 – постоянные времени первого и второго электромагнитов;
– постоянные времени первого и второго электромагнитов;  ,
,  ,
,  – начальные значения токов в обмотках первого и второго электромагнитов и смещения ротора от центра магнитной системы;
– начальные значения токов в обмотках первого и второго электромагнитов и смещения ротора от центра магнитной системы;  ,
, и
и  – начальные значения скорости изменения токов в обмотках электромагнитов и скорости перемещения ротора;
– начальные значения скорости изменения токов в обмотках электромагнитов и скорости перемещения ротора;  – конструктивный коэффициент электромагнитного подшипника;
– конструктивный коэффициент электромагнитного подшипника;  – зазор между статором и ротором при расположении ротора в центре магнитной системы;
– зазор между статором и ротором при расположении ротора в центре магнитной системы;  – возмущающая сила, действующая по оси
– возмущающая сила, действующая по оси  .
.
Численные значения модели соответствуют радиальному электромагнитному подшипнику нагнетателя газоперекачивающего агрегата ГПА Ц-16, когда ротор смещено относительно центра магнитной системы на мкм, начальные значения токов
мкм, начальные значения токов  А,
А,  ,
,  , а электромагниты характеризуются следующими параметрами:
, а электромагниты характеризуются следующими параметрами:  Нм2/А2,
Нм2/А2,  с,
с,  с,
с,  Ом,
Ом,  Н/м.
Н/м.
Кроме этого в расчетной модели учтены регуляторы, соответствующие функциональной схеме, представленной на фиг. 3, силовые преобразователи, регулирующие напряжения и токи в обмотках противоположных электромагнитов, и датчик положения ротора. Датчик положения представлен безынерционным звеном с коэффициентом передачи  дискрет/м. Первый регулятор имеет следующие настройки:
дискрет/м. Первый регулятор имеет следующие настройки:  ,
,  с,
с,  с,
с,  с. Второй регулятор имеет следующие параметры:
с. Второй регулятор имеет следующие параметры:  ,
,  с,
с,  с,
с,  с. Силовые преобразователи представлены коэффициентами передачи
с. Силовые преобразователи представлены коэффициентами передачи  В/дискрета, что соответствует опорному напряжению
В/дискрета, что соответствует опорному напряжению  В и цифровому четырнадцатиразрядному широтно-импульсному модулятору.
В и цифровому четырнадцатиразрядному широтно-импульсному модулятору.
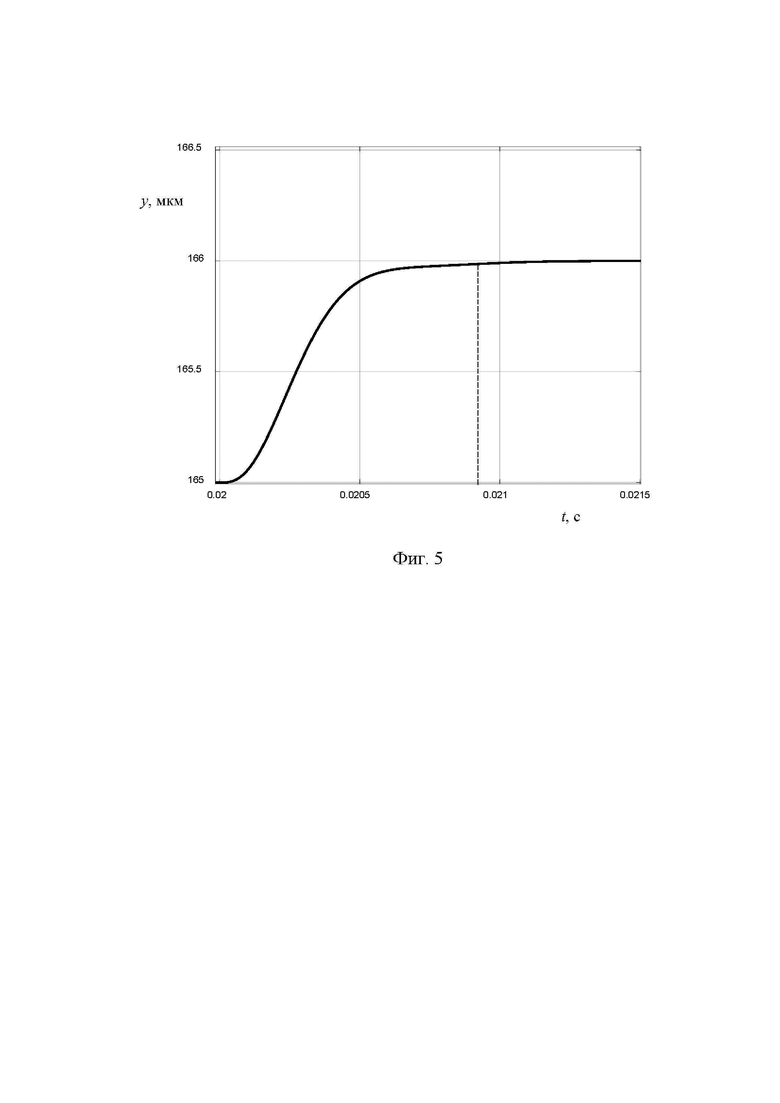
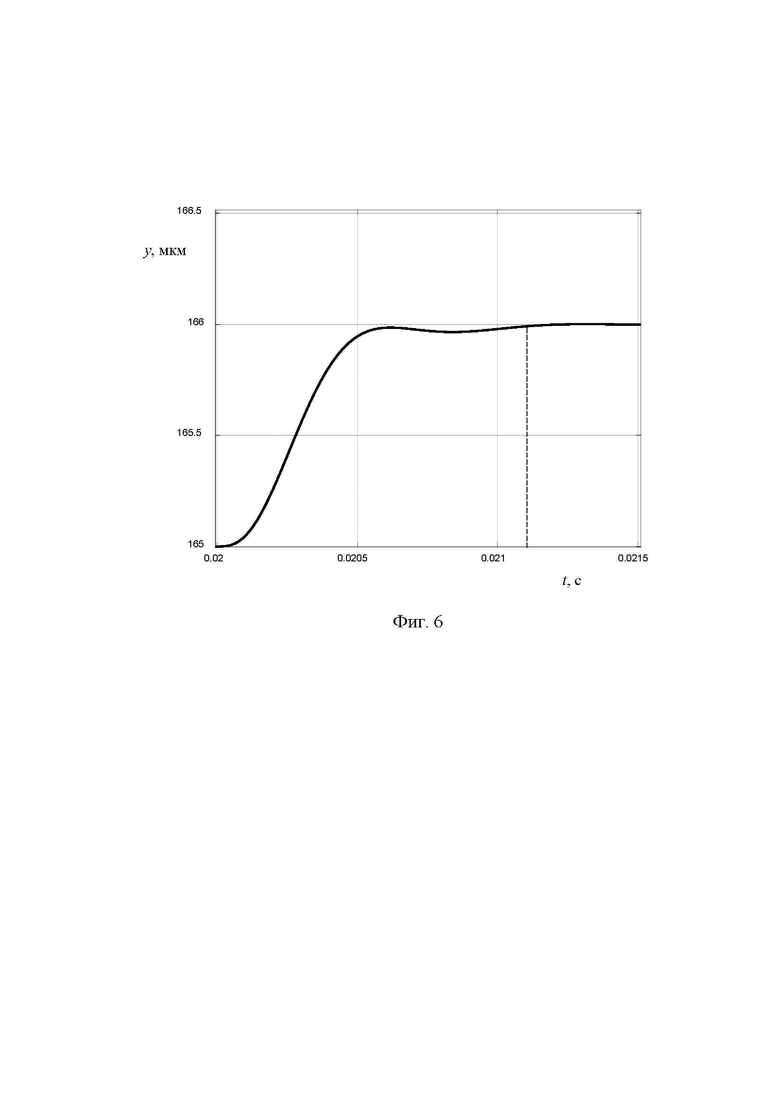
Расчетная модель позволяет построить графики переходных процессов по управляющему (фиг. 5) и возмущающему (фиг. 6) воздействию в системе управления электромагнитным подвесом ротора при смещении ротора относительно центра магнитной системы при разных настройках регуляторов. Анализ графиков показывает, что в системе управления электромагнитным подвесом ротора наблюдается высокое быстродействие. Время переходного процесса по управляющему воздействию составляет  с. При этом динамический провал ротора при набросе возмущающей силы
с. При этом динамический провал ротора при набросе возмущающей силы  Н равен
Н равен  мкм, что соответствует динамической жесткости опоры
мкм, что соответствует динамической жесткости опоры  Н/м.
Н/м.
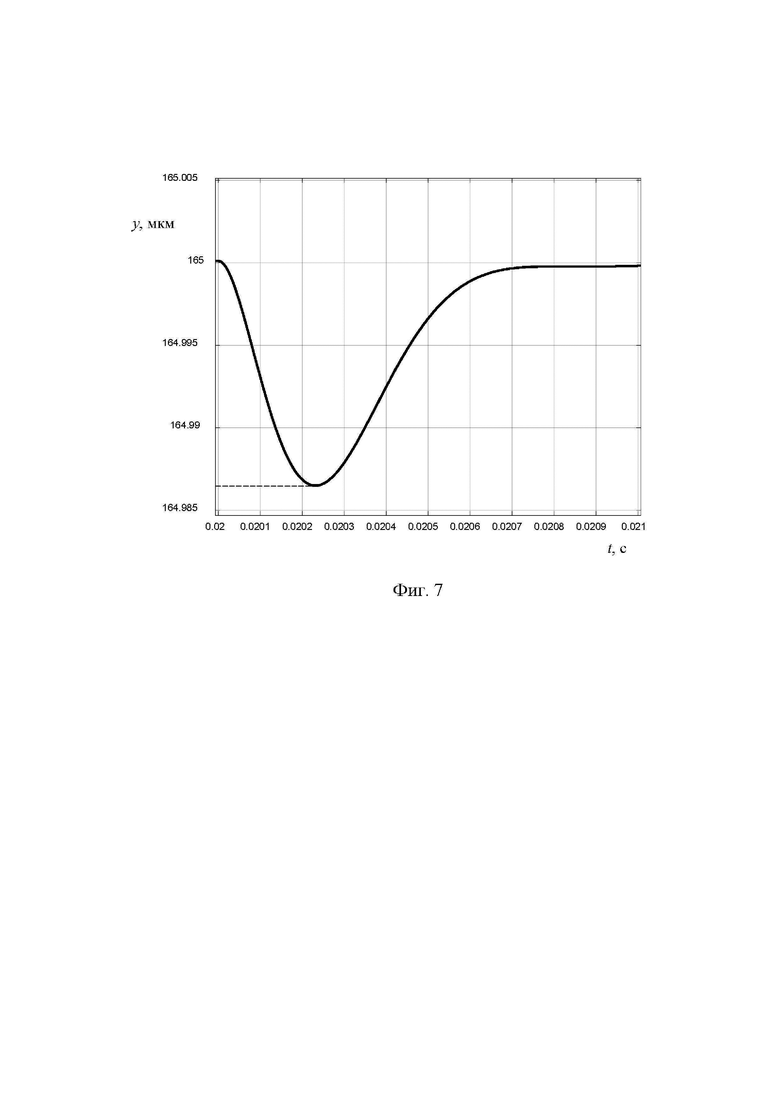
Достичь подобных результатов в системе управления, взятой за прототип, невозможно. Действительно, результаты моделирования показывают, что при одинаковой настройке регуляторов время переходного процесса увеличивается в 1,22 раза и становится равным с(фиг. 7), а динамический провал ротора при Н становится равным
с(фиг. 7), а динамический провал ротора при Н становится равным мкм, то есть динамическая жесткость уменьшается в 1,4 раза, составляя
мкм, то есть динамическая жесткость уменьшается в 1,4 раза, составляя  Н/м.
Н/м.
Кроме обеспечения большого быстродействие и динамической жесткости электромагнитного подвеса ротора предложенная система управления позволяет снизить напряжение питания и токи электромагнитов за счет перераспределения зазоров между первым и вторым электромагнитом и пассивным магнитом ротора. Действительно, выбранная при моделировании величина смещения ротора относительно центра магнитной системы мкм обеспечивает полную компенсацию силы веса ротора, приходящейся на один канал управления радиального электромагнитного подшипника, что позволяет снизить опорное напряжение питания силовых преобразователей с 220 В (применяемых в современных системах управления электромагнитным подвесом ротора нагнетателя газоперекачивающего агрегата ГПА Ц-16) до 48 В. Компенсация силы веса ротора за счет перераспределения зазоров приводит к снижению силы тока в обмотках верхних электромагнитов, что обеспечивает снижение потребляемой мощности.
Таким образом, предложенная система управления электромагнитным подвесом ротора позволяет достичь большое быстродействие и динамическую жесткость электромагнитного подвеса ротора при снижении токов в электромагнитах, компенсирующих силу веса, и снижение потребляемой мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2375736C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ПОДШИПНИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290746C1 |
Изобретение относится к электротехнике, а именно к машиностроению, и может быть использовано в роторных механизмах на электромагнитных опорах. Техническим результатом является обеспечение большого быстродействия и динамической жесткости электромагнитного подвеса ротора, снижение токов в электромагнитах, компенсирующих силу веса, и снижение потребляемой мощности. Система управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, первый и второй регуляторы, первый силовой преобразователь, первый и второй электромагниты, причем выход датчика положения ротора соединен с первыми входами первого и второго регуляторов, выход первого силового преобразователя соединен с обмоткой первого электромагнита, в каждый канал дополнительно введены второй силовой преобразователь и блок задания смещения; причем выход первого регулятора соединен с входом первого силового преобразователя, выход второго регулятора соединен с входом второго силового преобразователя, выход которого соединен с обмоткой второго электромагнита, выход блока задания смещения соединен с вторыми входами первого и второго регуляторов. 8 ил.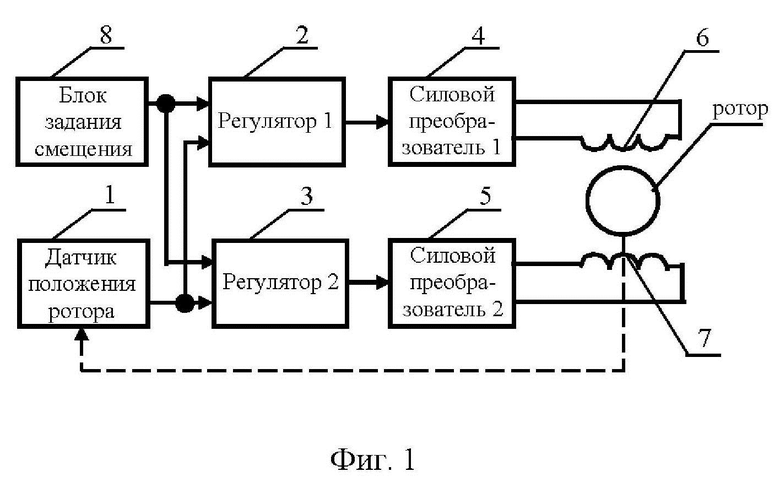
Система управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, первый и второй регуляторы, первый силовой преобразователь, первый и второй электромагниты, причем выход датчика положения ротора соединен с первыми входами первого и второго регуляторов, выход первого силового преобразователя соединен с обмоткой первого электромагнита, отличающаяся тем, что в каждый канал дополнительно введены второй силовой преобразователь и блок задания смещения, причем выход первого регулятора соединен с входом первого силового преобразователя, выход второго регулятора соединен с входом второго силового преобразователя, выход которого соединен с обмоткой второго электромагнита, а выход блока задания смещения соединен с вторыми входами первого и второго регуляторов.
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2375736C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| US 5760510 A, 02.06.1998. | |||

