Изобретение относится к машиностроению, в частности к системам динамической стабилизации широко применяемой в автомобильной промышленности, и может быть использовано в наземных транспортных средствах.
Из уровня техники аналогичных изобретений не известно.
Сущность изобретения: система контроля ослабления тормозного усилия состоит из датчиков, которые отслеживают ряд параметров, таких как вращение колес, сила нажатия на педаль тормоза, положение педали тормоза и газа, ускорение (замедление), дистанцию до ближайшего объекта и блока управления системы, который в случае отклонения от заданных норм корректирует работу тормозов при помощи гидравлического модулятора согласно ранее заложенной программе.
Целью изобретения является повышение управляемости комфорта и безопасности транспортных средств.
Между скоростью, силой и временем давления на тормозные механизмы, реакции подвески, сцеплением шин с дорогой, раскачкой кузова и перераспределением веса транспортного средства есть определенная зависимость. Для контроля над этими показателями в оптимальном, комфортном режиме необходима отточенная и доведенная до профессионализма способность водителя чувствовать и управлять транспортным средством и особенно тормозным усилием во время не только нажатия, но и, что более важно, отпускания тормозов. При наличии системы пользователь может не утруждать себя жестким контролем над тормозным усилием, при этом не получая неприятных обратных толчков после полной остановки транспортного средства и во время его движения после отпускания педали тормоза. Что заставляет транспортное средство быть более сбалансированным, комфортным и безопасным.
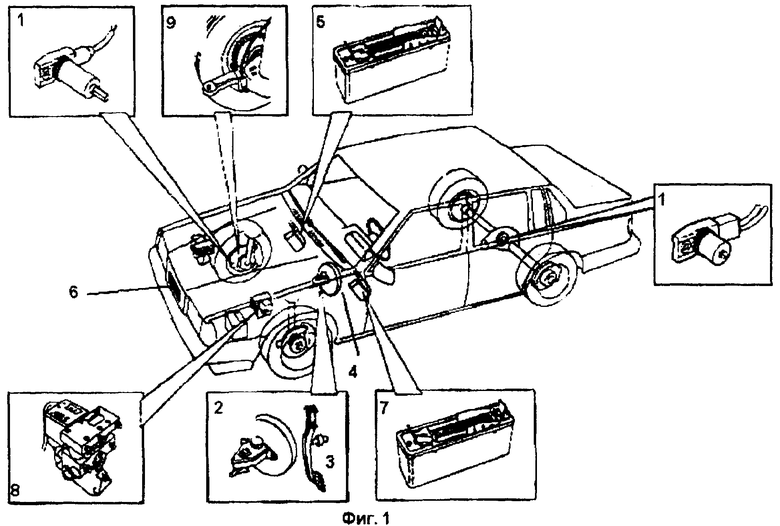
Основной блок системы контроля ослабления тормозного усилия (фиг.1) состоит из датчиков вращения колес 1, силы нажатия на педаль тормоза 2, положения педали тормоза 3, положения педали газа 4, ускорения (замедления) 5, датчика 6, регистрирующего расстояние до ближайшего по курсу объекта, а также блока управления 7, представляющего собой микропроцессор, и гидравлического модулятора 8, связанного с тормозными механизмами 9 транспортного средства и управляемыми сигналами с блока управления через гидравлический модулятор.
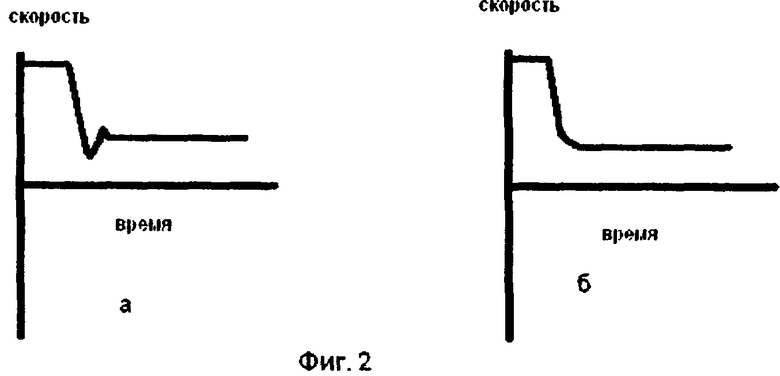
Система работает следующим образом. Сигналы от датчиков 1, 2, 3, 4, 5 и 6 обрабатываются блоком управления 7. В случае отклонения от нормальных значений, как, например, при чрезмерном переходе от замедления к равномерному движению (датчики 1 и 5) во время ослабления тормозного усилия (датчики 2 и 3) в движении (датчик 1) и при отпущенной педали газа (датчик 4), блок 7 выдает команду гидравлическому модулятору 8 о более плавном сбросе давления в тормозной магистрали в соответствии с заранее заданными параметрами. Это способствует более плавному переходу от замедления к равномерному движению и связанными с этим процессами, такими как перераспределение веса, отсутствие раскачки, более надежная управляемость, безопасность и т.д. Для более наглядного отображения этих процессов представлены графики (фиг.2а) без системы и (фиг.2б) с системой.
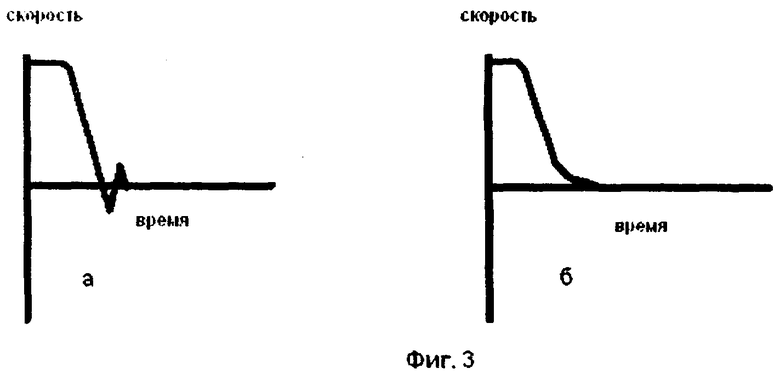
Если транспортное средство продолжает торможение до полной остановки и датчики фиксируют следующие параметры: силу замедления (датчики 1 и 5), отсутствие объектов в пределах тормозного пути (датчик 6), ослабление тормозного усилия, но не полное отпускание педали тормоза (датчики 2 и 3), отпущенная полностью педаль газа (датчик 4), приближение к нулевой отметке по скорости (датчики 1), то в этом случае блок управления 7 дает команду гидравлическому модулятору 8 о сбросе давления в тормозной магистрали в соответствии с заложенными параметрами и последующем восстановлении тормозного усилия. Это компенсирует такие нежелательные эффекты, как отброс пассажиров в кресла и обратно, неприятные толчки, с внешней стороны видимые как клевок транспортного средства носом с последующей угасающей раскачкой. Для более наглядного отображения этих процессов представлены графики (фиг.3а) без системы и (фиг.3б) с системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2604003C2 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1990 |
|
RU2041090C1 |
| СПОСОБ УЛУЧШЕНИЯ ХОДА ПЕДАЛИ ТОРМОЗА | 2012 |
|
RU2624394C2 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМИ ТОРМОЗНЫМИ МЕХАНИЗМАМИ АВТОМОБИЛЯ | 2008 |
|
RU2478501C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РЕКУПЕРАТИВНЫМ ТОРМОЖЕНИЕМ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2673206C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| Вариатор торможения по фактическому сцеплению колеса и дороги | 1991 |
|
SU1794124A3 |
| Устройство для регулирования режима торможения транспортного средства | 1978 |
|
SU746410A1 |
Изобретение относится к системам динамической стабилизации транспортных средств. Система содержит датчики вращения колес, силы нажатия на педаль тормоза, положения педали тормоза, положения педали газа, расстояния до ближайшего объекта, блок управления, гидравлический модулятор, датчик ускорения/замедления. Технический результат заключается в повышении управляемости и безопасности транспортных средств. 3 ил.
Система контроля ослабления тормозного усилия, содержащая датчики вращения колес, силы нажатия на педаль тормоза, положения педали тормоза, положения педали газа, расстояния до ближайшего объекта, а также блок управления и гидравлический модулятор, связанный с тормозными механизмами, отличающаяся тем, что имеет датчик ускорения (замедления), который связан с блоком управления и в совокупности с остальными датчиками и механизмами системы осуществляет контроль над сбросом давления в тормозной системе после каждого ослабления тормозного усилия в соответствии с заданными параметрами ранее заложенной программы.
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1984 |
|
SU1251450A1 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ ОТ ЮЗА КОЛЁСНЫХ ПАР ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2200102C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УЗЕЛ ТОРМОЗНОГО УСТРОЙСТВА | 1992 |
|
RU2068350C1 |
| JP 2004249855 А, 09.09.2004. | |||

