ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству управления распределением движущей силы для надлежащего распределения движущей силы к отдельным ведущим колесам транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Ведущие колеса автомобиля снабжены дифференциальной передачей (дифференциальным устройством) между левыми колесами и правыми колесами. Как результат, автомобиль может плавно поворачивать наряду с допущением разницы в частоте вращения между левым и правым колесами во время поворота. Более того, обычно, в случае машины с приводом на четыре колеса, не только вышеупомянутая дифференциальная передача левого и правого колес, но также и дифференциальная передача (межосевой дифференциал) размещены между передними колесами и задними колесами, так что может допускаться разница частоты вращения между передними и задними колесами.
В последние годы машины разновидностей, сосредотачивающихся на езду по плохим дорогам или спортивную езду, часто снабжены дифференциальным ограничительным устройством для ограничения движения с различной скоростью, обусловленного дифференциальной передачей. Это дифференциальное ограничительное устройство представлено дифференциалом с ограниченной пробуксовкой (LSD), который может управляться электрически или механически, чтобы распределять надлежащую движущую силу на требуемые ведущие колеса, даже если какое-нибудь ведущее колесо должно буксовать.
Кроме того, была разработана система распределения движущей силы, которая предназначена для случая простой пробуксовки ведущих колес и в которой устройство карданной передачи, представленное вышеупомянутым LSD, приводится в действие непосредственно, чтобы улучшать поворотливость, характеристики ускорения и характеристики устойчивости транспортного средства. Система распределения движущей силы проиллюстрирована механизмом распределения движущей силы передних и задних колес, допускающим изменение распределения движущей силы передних и задних колес, механизмом распределения движущей силы левого и правого колес, допускающим изменение распределения движущей силы левого и правого колес, LSD с электронным управлением, сцепление с электронным управлением, или тому подобное.
С другой стороны, транспортное средство, оборудованное антиблокировочной тормозной системой (ABS) была разработана и осуществлена на практике, так что транспортное средство может надежно замедляться наряду с сохранением его управляемости во время торможения.
Здесь, транспортное средство, имеющее обе вышеупомянутые систему распределения движущей силы и ABS, отягощены проблемой, что управление механизмом распределения движущей силы и управление ABS противоречат друг другу. Например, публикация заявки на патент Японии №2005-104233A может решать такую проблему и улучшать сходство управления между системой распределения движущей силы и ABS. Согласно этой технологии по публикации заявки на патент Японии №2005-104233A режим управления системы распределения движущей силой соответствующим образом сменяется в ответ на действие/бездействие ABS между обычным режимом и режимом управления (соответствующим ABS режимом), не препятствующим воздействию управления ABS, и на то, находится ли µ поверхности дороги в таком соответствующем ABS режиме в высоком µ (соответствующим поверхности сухой асфальтовой дороги) или в низком µ (соответствующим поверхности мокрой асфальтовой дороги). Более конкретно на дороге с высоким µ предпочтительно управление посредством механизма распределения движущей силы левого и правого колес, но управление посредством ABS предпочтительно для продольного направления. На дороге с низким µ режим управления сменяется для предпочтения полного управления посредством ABS. Более того, отдельные режимы управления по управлению распределением движущей силы иллюстрируются управлением по разнице частоты вращения (управлением по ΔN) между передними и задними колесами и левым и правым колесами, соответствующим ускорению управлением, соответствующим замедлению управлением, и так далее. На дороге с высоким µ производится управление для уменьшения управляемой переменной только для управления по ΔN. На дорогое с низким µ управляемая переменная управления по ΔN дополнительно уменьшается, так что производится только управление ΔN без соответствующего ускорения управления или соответствующего замедления управления.
В вышеупомянутой технологии, раскрытой в публикации заявки на патент Японии №2005-104233A, режим управления системы распределения движущей силы во время действия ABS в основном переключает два соответствующих ABS режима (для дороги с высоким µ и дороги с низким µ). Поэтому технология провоцирует проблему заключающуюся в том, что движущая сила не может хорошо распределяться на дороге со средним µ (например, поверхности влажной асфальтовой дороги или немощеной дороге), на заснеженной дороге у дороги с низким µ, или на дороге с крайне низким µ (например, обледенелой дороге или на льду).
Более того, в случае когда µ поверхности дороги находится около порогового значения переключения двух соответствующих ABS режимов, возникает другая проблема, что управление не стабилизируется при колеблющемся или внезапном изменении в управлении с нормального движения на обычной поверхности дороги.
Более того, у различных управлений режима управления распределением движущей силы соответствующее ускорению управление или соответствующее замедлению управление, иное чем управление по ΔN, связано с операцией уменьшения управляемой переменной либо включения-выключения, подобной таковой у управления по ΔN. Как результат, точное управление уменьшением, соответствующее характеристикам (то есть степени противоречия управлению согласно ABS), не может производиться, провоцируя нарушение управления посредством ABS или снижение характеристик управления (например, поворотливости).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Поэтому один из предпочтительных аспектов изобретения заключается в создании устройства управления распределением движущей силы, которое может индивидуально и непрерывно регулировать управляемые переменные различных управлений по распределению движущей силы превосходным образом для от дороги с низким µ до дороги с высоким µ и которое предназначено для улучшения устойчивости поведений транспортного средства достаточным подавлением взаимного влияния управления, возникающего между управлением посредством механизма распределения движущей силы и управлением посредством антиблокировочной тормозной системы.
Согласно еще одному аспекту изобретения предложено устройство управления распределением движущей силы, включающее в себя механизм распределения, выполненный с возможностью переменного распределения движущей силы от двигателя к отдельным ведущим колесам транспортного средства; контроллер распределения, выполненный с возможностью для управления механизмом распределения на основании состояния движения транспортного средства; антиблокировочную тормозную систему, выполненную с возможностью приведения в действие при торможении транспортного средства для управления тормозными состояниями отдельных колес, тем самым, управляя состояниями пробуксовки отдельных колес; детектор ускорения, выполненный с возможностью определения первого ускорения в направлении спереди-назад транспортного средства и второго ускорения в направлении слева-направо транспортного средства; вычислитель синтезированного ускорения, выполненный с возможностью вычисления синтезированного ускорения по первому ускорению и второму ускорению; и контроллер коэффициентов регулирования, выполненный с возможностью недискретного изменения коэффициентов регулирования для ограничения управления контроллера распределения, когда приведена в действие антиблокировочная тормозная система, согласно вычисленному синтезированному ускорению.
Согласно вышеприведенному действие механизма распределения управляется во время действия антиблокировочной тормозной системы на основе коэффициентов регулирования, которые устанавливаются недискретным образом, согласно синтезированному ускорению между продольным ускорением и поперечным ускорением контроллером коэффициентов регулирования. Поэтому во время действия антиблокировочной тормозной системы на основе непрерывных коэффициентов регулирования согласно значению корреляции коэффициентов трения поверхности дороги (µ поверхности дороги) управляемая переменная управления распределением движущей силы может превосходно регулироваться от дороги с низким µ до дороги с высоким µ, так что управление распределением и управление антиблокировочной тормозной системы может выполняться надлежащим образом без какого бы то ни было резкого изменения управляемой переменной, даже в отношении резкого изменения µ поверхности дороги.
Как результат, даже если поверхность дороги соответствует дороге со средним µ (например, поверхности влажной асфальтовой дороги или немощеной дороге), заснеженной дороге у дороги с низким µ или дороги с крайне низким µ (например, обледенелой дороги или на льду), возможно предотвращение неустойчивости управления распределением движущей силы и управления антиблокировочной тормозной системы для улучшения, тем самым, устойчивости поведения транспортного средства независимо от µ поверхности дороги.
Более того, устройство управления распределением включает в себя детектор ускорения для определения продольного ускорения и поперечного ускорения транспортного средства, а синтезированное ускорение продольного ускорения и поперечного ускорения вычисляются в качестве значения корреляции коэффициентов трения поверхности дороги. Следует отметить, что синтезированное ускорение продольного ускорения и поперечного ускорения во время действия антиблокировочной тормозной системы может быть значением корреляции коэффициентов трения поверхности дороги. Поэтому без обеспечения отдельного детектора коэффициенты регулирования могут легко устанавливаться согласно значению корреляции коэффициентов трения поверхности дороги.
Контроллер коэффициентов регулирования может быть выполнен с возможностью для увеличения коэффициентов регулирования, когда синтезированное ускорение становится большим для уменьшения предпочтения управления антиблокировочной тормозной системы.
Согласно вышеприведенному контроллер коэффициентов регулирования устанавливает коэффициенты регулирования так, что коэффициенты регулирования могут непрерывно увеличиваться согласно росту синтезированного ускорения, чтобы, тем самым, увеличивать предпочтение управления антиблокировочной тормозной системы наряду с ограничением управляемой переменной управления распределением движущей силы меньшим значением для дороги с более низким µ. Управляемая переменная управления распределением движущей силы может становиться большей для дороги с большим µ, так что противоречие управления между управлением распределением движущей силы и управлением антиблокировочной тормозной системы может удовлетворительно сдерживаться от дороги с низким µ до дороги с высоким µ.
Кроме того, механизм распределения может включать в себя первый механизм распределения, выполненный с возможностью для изменения значений движущих сил, распределенных на передние и задние колеса транспортного средства, и второй механизм распределения, выполненный с возможностью изменения значений движущих сил, распределенных на левые и правые колеса транспортного средства.
Кроме того, контроллер коэффициентов регулирования может быть выполнен с возможностью изменения коэффициентов регулирования по отдельности, для первого механизма распределения и второго механизма распределения.
Кроме того, контроллер распределения может быть выполнен с возможностью индивидуального управления первым механизмом распределения и вторым механизмом распределения на основании коэффициентов регулирования.
Согласно вышеприведенному действия механизма распределения движущей силы передних и задних колес и механизма распределения движущей силы левого и правого колес управляются по отдельности. Как результат, управление распределением движущей силы левого и правого колес и управление распределением движущей силы передних и задних колес могут выполняться по отдельности надлежащим образом от дороги с низким µ до дороги с высоким µ.
Кроме того, контроллер распределения может иметь множество режимов управления.
Кроме того, контроллер коэффициентов регулирования может быть выполнен с возможностью изменения коэффициентов регулирования для каждого режима управления.
Согласно вышеприведенному во время действия антиблокировочной тормозной системы в каждом из множества режимов управления определяются коэффициенты регулирования согласно синтезированному ускорению; выходное значение каждого режима управления вычисляется на основе определенных коэффициентов регулирования; управляемая переменная механизма распределения движущей силы задействуется на основе вычисленного выходного значения; и действия механизма распределения движущей силы управляются на основе задействованной управляемой переменной. В результате, управление распределением движущей силы и управление антиблокировочной тормозной системы могут выполняться надлежащим образом без какого бы то ни было снижения характеристик управления (поворотливости) наряду с подавлением в достаточной мере противоречий управления между управлением распределением движущей силы и управлением антиблокировочной тормозной системы в соответствии с уровнями противоречий индивидуального управления между отдельными режимами и управлением антиблокировочной тормозной системы.
Кроме того, режимы управления могут включать в себя дифференциальное управление, при котором обеспечивается управление механизмом распределения в соответствии с разницей частоты вращения между передними и задними колесами и/или разницей частоты вращения между левым и правым колесами.
Кроме того, контроллер коэффициентов регулирования может быть выполнен с возможностью уменьшения коэффициентов регулирования, так что дифференциальное управление является более ограниченным, чем другие режимы управления.
Согласно вышеприведенному контроллер распределения имеет такой один из многочисленных режимов управления, как для управления механизмом распределения движущей силы по управляемой переменной согласно разнице частоты вращения между колесами по меньшей мере одних из передних и задних колес, и левого и правого колес транспортного средства и что контроллер коэффициентов регулирования устанавливает коэффициенты регулирования настолько малыми, что управляемая переменная управления по разнице частоты вращения во время действия антиблокировочной тормозной системы может быть в целом более ограниченной, чем таковая у другого режима управления. В результате, управление по разнице частоты вращения имеет тенденцию высоких уровней противоречия управления с управлением антиблокировочной тормозной системы. Однако противоречие управления между управлением распределением движущей силы согласно такому управлению по разнице частоты вращения и управлением антиблокировочной тормозной системы может подавляться в достаточной мере, а управление распределением движущей силы и управление антиблокировочной тормозной системы могут выполняться надлежащим образом без какого бы то ни было снижения характеристик управления (поворотливости).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вариант осуществления может быть подробно описан со ссылкой на прилагаемые чертежи, на которых:
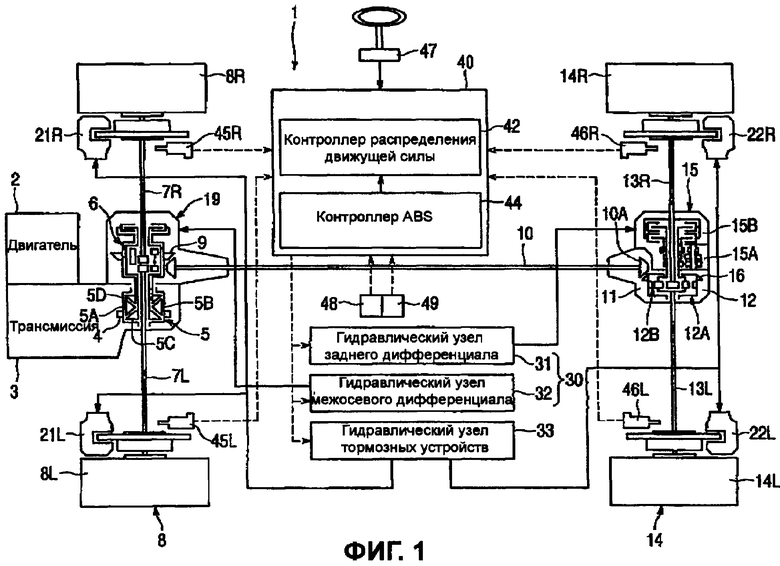
Фиг.1 представляет собой структурную схему, схематично показывающую конструкцию устройства управления распределением движущей силы согласно одному из вариантов осуществления настоящего изобретения; и
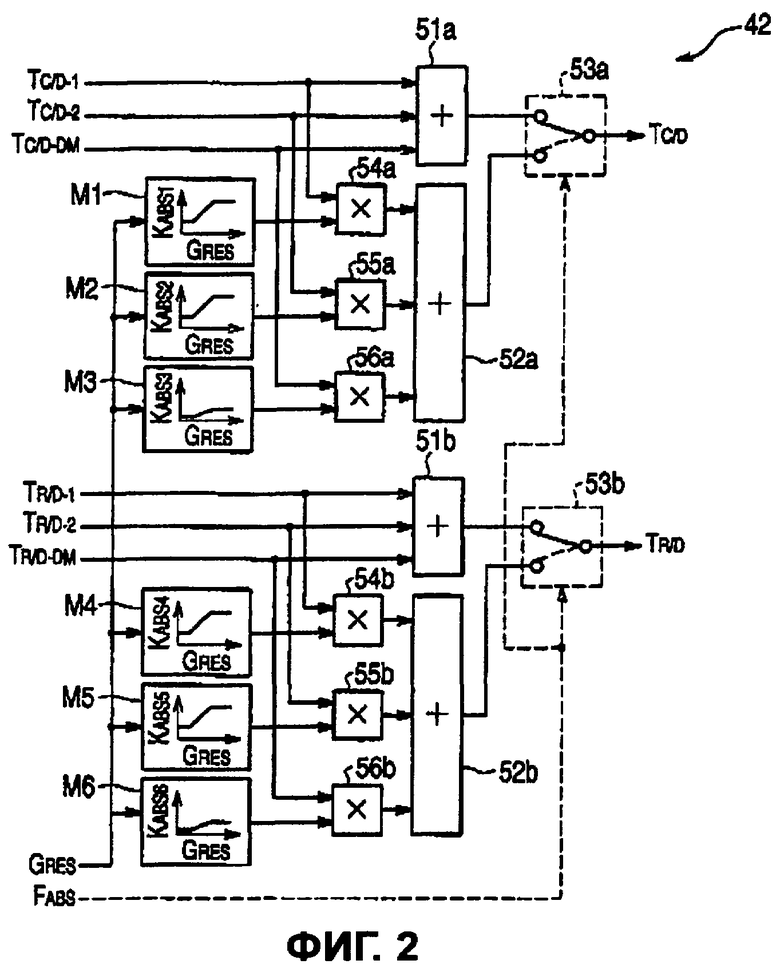
Фиг.2 представляет собой схематическую структурную схему, показывающую конструкцию системы управления устройства управления распределением движущей силы согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее описано устройство управления распределением движущей силы согласно одному из примерных вариантов осуществления настоящего изобретения.
На Фиг.1 показана схематическая структурная схема, показывающая конструкцию устройства управления распределением движущей силы согласно изобретению.
Как показано на Фиг.1, транспортное средство 1 с приводом на четыре колеса, в котором используется устройство управления распределением движущей силы по изобретению, снабжено двигателем 2, трансмиссией 3 и так далее, так что выходная мощность двигателя 2 передается через трансмиссию 3 и промежуточную зубчатую передачу 4 на межосевой дифференциал 5.
Выходная мощность межосевого дифференциала 5 передается, с одной стороны, через дифференциал 6 передней оси (который будет называться передним дифференциалом) с полуосей 7L и 7R на левое и правое колеса 8L и 8R передних колес 8 и, с другой стороны, через гипоидную зубчатую передачу 9, карданный вал 10, гипоидную зубчатую передачу 11 на стороне задних колес и дифференциал 12 задней оси (который будет называться задним дифференциалом) с полуосей 13L и 13R на левое и правое колеса 14L и 14R задних колес 14.
Более конкретно межосевой дифференциал 5 состоит из сателлитов 5A и 5B дифференциала и полуосевых шестерен 5C и 5D для зацепления с такими сателлитами 5A и 5B дифференциала. Вращающий момент, который вводится с сателлитов 5A и 5B дифференциала, передается через одну полуосевую шестерню 5C на передние колеса 9, а через другую полуосевую шестерню 5D и карданный вал 10 или тому подобное на задние колеса 14. В это время межосевой дифференциал 5 обеспечивает возможность движения с различной скоростью между передними колесами 8 и задними колесами 14, но не мешает поворотливости транспортного средства 1.
Кроме того, к этому межосевому дифференциалу 5 присоединен механизм 19 распределения движущей силы передних и задних колес (механизм распределения движущей силы), который действует в качестве системы распределения движущей силы для распределения вращающего момента, выдаваемого с двигателя 2, переменным образом на передние и задние колеса 8 и 14, наряду с переменным ограничением разницы, которая допускается между передними колесами 8 и задними колесами 14. Механизм 19 распределения движущей силы передних и задних колес составлен из механизма гидравлического многодискового сцепления типа работающего в масляной ванне и может надлежащим образом изменять распределение вращающего момента (движущей силы), который должен передаваться на передние колеса 8 и задние колеса 14 в соответствии с давлением масла, подаваемым из гидравлического узла 30 карданной передачи, как будет описано ниже.
К переднему дифференциалу 6, с одной стороны, приложена дифференциальная передача реагирующего на вращающий момент типа, которая ограничивает движения с различной скоростью между левым и правым колесами 8L и 8R в соответствии с величиной вращающего момента, введенного с двигателя 2.
С другой стороны, задний дифференциал 12 имеет свой картер 12A снабженный, на его внешней периферии, коронной шестерней 16 для зацепления с ведущей шестерней 10A на заднем конце карданного вала 10 и на его внутренней периферии механизмом 12B планетарной передачи. Более того, этот механизм 12B планетарной передачи обеспечивает движения с разной скоростью между левым и правым задними колесами 14L и 14R. Согласно такой конструкции вращающий момент, который вводится с двигателя 2 через карданный вал 10, ведущую шестерню 10A и так далее на коронную шестерню 16, передается на левое заднее колесо 14L и правое заднее колесо 14R, наряду с тем, что движения с разной скоростью между двумя колесами 14L и 14R обеспечиваются механизмом 12B планетарной передачи.
Более того, к заднему дифференциалу 12 присоединен механизм 15 распределения движущей силы левого и правого колес (механизм распределения движущей силы), который может надлежащим образом изменять распределение движущих сил, которые должны передаваться на левое и правое колеса 14L и 14R. Механизм 15 распределения движущей силы левого и правого колес состоит из механизма 15A изменения скорости и механизма 15B передачи вращающего момента типа управления переменной пропускной способности, так что он также может изменять движущую силу (например, вращающий момент) правого колеса 14R и левого колеса 14L надлежащим образом, согласно ситуациям движения транспортного средства в ответ на давление масла, подаваемое из гидравлического узла 30 карданной передачи, как также будет описано ниже.
Механизм 15A изменения скорости ускоряет или замедляет частоту вращения одного (например, левого колеса 14L) из левого и правого колес и выдает измененную частоту вращения на механизм 15B передачи вращающего момента.
Механизм 15B передачи вращающего момента типа управления переменной пропускной способности является механизмом гидравлического многодискового сцепления типа работающего в масляной ванне, допускающим регулирование пропускной способности по крутящему моменту в ответ на управляющее давление масла, подаваемое из описанного ниже гидравлического узла 30 карданной передачи. Механизм 15B передачи вращающего момента передает вращающий момент между левым и правым колесами 14L и 14R, используя разницу частоты вращения между частотой вращения, ускоренной или замедленной механизмом 15A изменения скорости, и частотой вращения другого колеса (то есть правого колеса 14R) из левого и правого колес механизма 15B передачи вращающего момента, так что он может повышать или понижать крутящий момент на ведущем валу одного колеса и может понижать или повышать крутящий момент на ведущем валу другого колеса. Здесь, механизм 12B планетарной передачи, механизм 15A изменения скорости и механизм 15B передачи вращающего момента, описанные выше, являются широко известными, и подробные описания таких отдельных конструкций опущены.
Более того, транспортное средство 1 снабжено гидравлическим узлом 30 карданной передачи для подачи давления масла в механизм 15 распределения движущей силы левого и правого колес и механизм 19 распределения движущей силы передних и задних колес. Более конкретно гидравлический узел 30 карданной передачи состоит из гидравлического узла 31 заднего дифференциала для приведения в действие механизма 15 распределения движущей силы левого и правого колес гидравлическим образом, и гидравлического узла 32 межосевого дифференциала для приведения в действие механизма 13 распределения движущей силы передних и задних колес гидравлическим образом. Гидравлический узел 31 заднего дифференциала и гидравлический узел 32 межосевого дифференциала соединены с электронным блоком 40 управления (ЭБУ).
Каждый из гидравлического узла 31 заднего дифференциала и гидравлического узла 32 межосевого дифференциала содержит аккумулятор, насос с электродвигателем для подъема рабочего масла в аккумуляторе до заданного давления и датчик давления или тому подобное для контроля давления масла, поднятого насосом с электродвигателем, и клапан с электромагнитным управлением (не показан) для регулирования давления масла, которое иногда регулируется насосом с электродвигателем, чтобы выдавать регулируемое давление, и клапан переключения направления или тому подобное для переключения целевого положения подачи давления масла, регулируемого таким клапаном с электромагнитным управлением, на заданную масляную камеру (не показана) механизма 15 распределения движущей силы левого и правого колес.
ЭБУ 40 оборудован контроллером 42 распределения движущей силы (узлом управления распределением движущей силы). По существу, гидравлический узел 31 заднего дифференциала и гидравлический узел 32 межосевого дифференциала соединены с контроллером 42 распределения движущей силы.
Контроллер 42 распределения движущей силы оборудован ЦП (центральным процессором, CPU), ПЗУ (постоянным запоминающим устройством, ROM), ОЗУ (оперативным запоминающим устройством, RAM), интерфейсом и так далее и соединен, на своей входной стороне, с различными датчиками не только с датчиками 45R, 45L, 46R и 46L частоты вращения колес, датчиком 47 угла поворота, датчиком 48 G (ускорения) (например, продольного G и поперечного G) и датчиком 49 угловой скорости рыскания, но также и с датчиком положения дроссельной заслонки (не показан). В результате, гидравлический узел 31 заднего дифференциала и гидравлический узел 32 межосевого дифференциала активно управляются согласно выходным значениям, которые задействуются контроллером 42 распределения движущей силы в соответствии с состоянием движения транспортного средства, определенным различными датчиками, такими как состояния движения транспортного средства, то есть скорость транспортного средства, состояние поворачивания и состояние движения кузова автомобиля, так что он может по отдельности управлять действиями механизма 15 распределения движущей силы левого и правого колес и механизма 19 распределения движущей силы передних и задних колес.
В случае когда транспортное средство 1 движется вперед, наряду с поворотом направо, заданное давление масла вводится из гидравлического узла 31 заднего дифференциала в механизм 15 распределения движущей силы левого и правого колес, так что вращающий момент, который должен распределяться на правое заднее колесо 14R, уменьшается для замедления правого заднего колеса 14R, тогда как вращающий момент, который должен распределяться на левое заднее колесо 14L, увеличивается для ускорения левого заднего колеса 14L. В результате, может создаваться правый (по часовой стрелке) момент рыскания на транспортном средстве 1 для улучшения, тем самым, поворотливости транспортного средства 1.
В случае когда транспортное средство движется вперед, наряду с поворотом налево, заданное давление масла вводится из гидравлического узла 31 заднего дифференциала в механизм 15 распределения движущей силы левого и правого колес, так что вращающий момент, который должен распределяться на левое заднее колесо 14L, уменьшается для замедления левого заднего колеса 14L, тогда как вращающий момент, который должен распределяться на правое заднее колесо 14R, увеличивается для ускорения правого заднего колеса 14R. В результате, может создаваться левый (против часовой стрелки) момент рыскания на транспортном средстве 1 для улучшения, тем самым, поворотливости транспортного средства 1.
Более того, заданное давление масла вводится из гидравлического узла 32 межосевого дифференциала в механизм 19 распределения движущей силы передних и задних колес, так что движения с различной скоростью между передними колесами 8 и задними колесами 14 могут ограничиваться для улучшения тяговых характеристик транспортного средства 1 или так что движения с различной скоростью между передними колесами 8 и задними колесами 14 могут обеспечить улучшение поворотливости транспортного средства 1.
Транспортное средство 1 снабжено антиблокировочной тормозной системой (ABS), посредством которой отдельные колеса 8L, 8R, 14L и 14R транспортного средства могут управляться в своих тормозных состояниях независимо один от другого таким образом, что колеса 8L, 8R, 14L и 14R могут быть в состояниях предпочтительной пробуксовки относительно поверхностей дороги. Эта ABS состоит из четырех тормозных устройств 21L, 21R, 22L и 22R, соответствующих отдельным колесам 8L, 8R, 14L и 14R транспортного средства 1, контроллера 44 ABS, размещенного в ЭБУ 40, для управления такими отдельными тормозными устройствами 21 и 22, и гидравлического узла 33 тормозных устройств, действующего в качестве гидравлического узла системы торможения для подачи давлений масла согласно команде из контроллера 44 ABS в отдельные тормозные устройства 21 и 22.
Гидравлический узел 33 тормозных устройств снабжен насосом с электродвигателем, клапаном с электромагнитным управлением и так далее, хотя это не показано, для регулирования давления тормозной жидкости.
С другой стороны, контроллер 44 ABS снабжен ЦП, ПЗУ, ОЗУ, интерфейсом и так далее и соединен, на своей входной стороне, с различными датчиками не только из датчиков 45R, 45L, 46R и 46L частоты вращения колес, датчика 48 G (например, продольного G и поперечного G) и датчика 49 угловой скорости рыскания, но также и датчика (хотя и не показан) нажатия педали тормоза. В результате, гидравлический узел 33 тормозных устройств активно управляется согласно выходным значениям, которые задействуются на основе информации с различных датчиков контроллером 44 ABS, так что он может по отдельности управлять состояниями действия тормозных устройств 21L, 21R, 22L и 22R.
На Фиг.2 показана схематичная структурная схема, демонстрирующая конструкцию системы управления в контроллере 42 распределения движущей силы устройства управления распределением движущей силы, составленного согласно изобретению. Со ссылкой на Фиг.2 описана суть управления, которое выполняется в контроллере 42 распределения движущей силы, устройства управления распределением движущей силы согласно изобретению.
В контроллере 42 распределения движущей силы, как описано выше, на основе информации с различных датчиков выходные значения согласно состоянию движения транспортного средства задействуются по отдельности, так что состояния действия механизма 15 распределения движущей силы левого и правого колес и механизма 19 распределения движущей силы передних и задних колес управляются соответственно в качестве управления распределением движущей силы левого и правого колес и управления распределением движущей силы передних и задних колес. Более конкретно в режимах управления по управлению распределением движущей силы левого и правого колес и управлению распределением движущей силы передних и задних колес, существует множество режимов управления, таких как «соответствующее ускорению управление», которое основано на открывании дроссельной заслонки или угле поворота, для предотвращения начальной пробуксовки колес во время резкого старта или для улучшения вменяемости транспортного средства во время поворота, «соответствующее замедлению управление», которое основано на продольном ускорении, для сохранения устойчивости положения транспортного средства во время резкого замедления, и «управление по разнице частоты вращения (управление по ΔN)», которое основано на разницах частот вращения между отдельными колесами, такими как передние и задние колеса 8 и 14 и левое и правое колеса 14L и 14R. Контроллер 42 распределения движущей силы выводит сигналы, соответствующие таким многочисленным управлениям.
В контроллере 42 распределения движущей силы, который показан на Фиг.2, выходное значение TC/D-1 первого управления передними и задними колесами, выходное значение TC/D-2 второго управления передними и задними колесами и выходное значение
TC/D-DN управления по ΔN передними и задними колесами выводятся, чтобы по отдельности соответствовать соответствующему ускорению управления, соответствующему замедлению управления и управлению по ΔN механизма 19 распределения движущей силы передних и задних колес; и выходное значение TR/D-1 первого управления левым и правым колесами, выходное значение TR/D-2 второго управления левым и правым колесами и выходное значение TR/D-DN управления по ΔN левым и правым колесами выводятся, чтобы по отдельности соответствовать соответствующему ускорению управления, соответствующему замедлению управления и управлению по ΔN механизма 15 распределения движущей силы левого и правого колес.
Как показано на Фиг.2, с другой стороны, контроллер 42 распределения движущей силы оборудован сумматорами 51a, 52a, 51b и 52b, коммутаторами 53a и 53b и умножителями 54a, 55a, 56a, 54b, 55b и 56b.
Более того, выходное значение TC/D-1 первого управления передними и задними колесами, выходное значение TC/D-2 второго управления передними и задними колесами и выходное значение TC/D-DN управления по ΔN передними и задними колесами, описываемые до сих пор, вводятся в и суммируются сумматором 51a, и вводятся через умножители 54a, 55a и 56a, и суммируются сумматором 52a. С другой стороны, выходное значение TR/D-1 первого управления левым и правым колесами, выходное значение TR/D-2 второго управления левым и правым колесами и выходное значение TR/D-DN управления по ΔN левым и правым колесами, описываемые до сих пор, вводятся в и суммируются сумматором 51b, и вводятся через умножители 54b, 55b и 56b, и суммируются сумматором 52b. Кроме того, на коммутаторе 53a выходной сигнал из сумматора 51a и выходное значение из сумматора 52a альтернативно выбираются и выводятся в качестве управляемой переменной TC/D распределения движущей силы передних и задних колес. Более того, на коммутаторе 53b выходной сигнал из сумматора 51b и выходное значение из сумматора 52b альтернативно выбираются и выводятся в качестве управляемой переменной TR/D распределения движущей силы передних и задних колес.
Коммутаторы 53a и 53b выполнены с возможностью переключения в ответ на состояние действия ABS. Более конкретно, когда ABS приводится в действие контроллером 44 ABS, принимается решение о действии ABS в контроллере 42 распределения движущей силы для формирования сигнала FABS действия ABS, так что коммутаторы 53a и 53b переключаются в ответ на такой сигнал FABS действия ABS. Более конкретно во время бездействия ABS коммутаторы 53a и 53b переключатся на стороны сумматоров 51a и 51b, так что выходные значения TC/D-1, TC/D-2 и TC/D-DN или выходные значения TR/D-1, TR/D-2 и TR/D-DN суммируются и выводятся (то есть в обычном режиме), как они есть, в качестве управляемой переменной TC/D распределения движущей силы передних и задних колес или управляемой переменной
TR/D распределения движущей силы левого и правого колес. Во время действия ABS, с другой стороны, коммутаторы 53a и 53b переключатся на стороны сумматоров 52a и 52b, так что выходные значения TC/D-1, TC/D-2 и TC/D-DN суммируются после прохождения через умножители 54a, 55a и 56a, или выходные значения TR/D-1, TR/D-2 и TR/D-DN суммируются после прохождения через умножители 54b, 55b и 56b и выводятся (а именно в соответствующем ABS режиме) в качестве управляемой переменной TC/D распределения движущей силы передних и задних колес или управляемой переменной TR/D распределения движущей силы левого и правого колес.
Как показано на Фиг.2, умножители 54a, 55a и 56a и умножители 54b, 55b и 56b выполнены с возможностью приема выходных значений отображений M1, M2 и M3, а также M4, M5 и М6 управления. Отображения M1, M2 и M3, и M4, M5 и М6 управления предназначены для вычисления (узел расчета синтезированного ускорения) синтезированного ускорения (вектор синтезированного ускорения) GRES на основе продольного ускорения (продольного G) и поперечного ускорения (поперечного G), которые определяются датчиком 48 G, и для ввода такого синтезированного ускорения GRES.
Отображения M1, M2 и M3, и M4, M5 и M6 управления определяют коэффициенты KABS1, KABS2, KABS3, KABS4, KABS5 и KABS6 усиления (0<KABS1-6<1) (коэффициенты регулирования), которые по отдельности умножаются на выходные значения TC/D-1, TC/D-2, TC/D-DN, TR/D-1, TR/D-2 и TR/D-DN в умножителях 54a, 55a и 56a и умножителях 54b, 55b и 56b для регулирования предпочтения ABS во время действия ABS, в соответствии с синтезированным ускорением GRES. Эти коэффициенты KABS1, KABS2, KABS3, KABS4, KABS5 и KABS6 усиления по отдельности предварительно устанавливаются (узлом установки коэффициентов регулирования) согласно экспериментам или тому подобному для отдельных выходных значений TC/D-1, TC/D-2, TC/D-DN, TR/D-1, TR/D-2 и TR/D-DN.
Отдельные амплитудные характеристики коэффициентов KABS1, KABS2, KABS3,
KABS4, KABS5 и KABS6 усиления устанавливаются настолько плавно, что значения коэффициентов усиления могут становиться непрерывно и постепенно большими по направлению к значению 1, по мере того как синтезированное ускорение GRES становится больше, когда синтезированное ускорение GRES находится по меньшей мере в пределах каждого заданного диапазона. Более конкретно синтезированное ускорение GRES, которым аппроксимируется значение управления выходными значениями TC/D-1 TC/D-2 и TC/D-DN или выходными значениями TR/D-1, TR/D-2 и TR/D-DN во время действия ABS, добавляется в то время как оно становится большим, выводится в качестве управляемой переменной TC/D распределения движущей силы передних и задних колес или управляемой переменной TR/D распределения движущей силы левого и правого колес, так что коэффициент вклада управления ABS делается небольшим. Более того, выходные значения TC/D-1, TC/D-2, TC/D-DN, TR/D-1, TR/D-2 и TR/D-DN ограничиваются согласно синтезированному ускорению GRES в пределах зоны, в которой синтезированное ускорение GRES является по меньшей мере меньшим, чем каждый заданный диапазон, так что управление ABS имеет соответственно высокое предпочтение.
Более того, отдельные амплитудные характеристики коэффициентов KABS3 и KABS6 усиления, соответствующих выходному значению TC/D-DN управления по ΔN передними и задними колесами и выходному значению TR/D-DN управления по ΔN левым и правым колесами, делаются такими, что уровень противоречия между управлением по ΔN и управления ABS является высоким. В результате, значение коэффициента усиления, в целом, является небольшим, то есть выходные значения TC/D-DN и TR/D-DN, в целом, весьма ограничены, так что управление ABS является настолько предпочтительным, насколько возможно.
Синтезированное ускорение GRES указывает максимальное ускорение (то есть максимальное ускорение/замедление или максимальное поворотное ускорение), которое может создаваться в ситуациях действия ABS, в которых ведущие колеса, такие как передние колеса 8 или задние колеса 14, могут буксовать. Из общего уравнения силы трения предполагается, что значение синтезированного ускорения
GRES во время действия ABS, деленное на ускорение Gg силы тяжести, по существу равно µ поверхности дороги (то есть GRES/Gg≈µ).
Более конкретно согласно изобретению во время действия ABS синтезированное ускорение GRES может легко определяться по продольному ускорению и поперечному ускорению без отдельного обеспечения какого бы то ни было узла определения µ поверхности дороги, а µ поверхности дороги (то есть коэффициент трения поверхности дороги) может легко оцениваться на основе такого синтезированного ускорения GRES, так что синтезированное ускорение GRES может надлежащим образом использоваться для управления.
Если синтезированное ускорение GRES заменяется µ поверхности дороги, по причине этого может быть упомянуто, что отдельные амплитудные характеристики устанавливаются из условия, чтобы коэффициенты KABS1, KABS2, KABS3, KABS4, KABS5 и KABS6 усиления ограничивали выходные значения TC/D-1, TC/D-2, TC/D-DN, TR/D-1, TR/D-2 и TR/D-DN в большей степени, в то время как поверхность дороги имеет более низкое µ и больше способствует управлению распределением движущей силы передних и задних колес или управлению распределением движущей силы левого и правого колес для дороги с большим µ.
В устройстве управления распределением движущей силы согласно изобретению, которое было описано выше, во время действия ABS значения, которые рассчитаны из условия, чтобы выходное значение TC/D-1 первого управления передними и задними колесами, выходное значение TC/D-2 второго управления передними и задними колесами и выходное значение TC/D-DN управления по ΔN передними и задними колесами из контроллера 42 распределения движущей силы умножались на коэффициенты KABS1, KABS2 и KABS3 соответственно умножителями 54a, 55a и 56a, суммировались сумматором 52a и выводились в качестве управляемой переменной TC/D распределения движущей силы передних и задних колес. Одновременно, значения, которые рассчитаны из условия, чтобы выходное значение TR/D-1 первого управления левым и правым колесами, выходное значение TR/D-2 второго управления левым и правым колесами, и выходное значение TR/D-DN управления по ΔN левым и правым колесами умножались на коэффициенты KABS4, KABS5 и KABS6 усиления соответственно умножителями 54b, 55b и 56b, суммировались сумматором 52b и выводились в качестве управляемой переменной TR/D распределения движущей силы левого и правого колес.
В результате, во время действия ABS на основе непрерывного коэффициента
KABS1-6 усиления согласно синтезированному ускорению GRES или µ поверхности дороги управляемая переменная управления распределением движущей силы может превосходно регулироваться от дороги с низким µ до дороги с высоким µ, так что управление распределением движущей силы и управление ABS могут выполняться надлежащим образом, без какого бы то ни было резкого изменения управляемой переменной, даже на фоне резкого изменения µ поверхности дороги.
Более того, отдельно для управления распределением движущей силы левого и правого колес и управления распределением движущей силы передних и задних колес различные управляемые переменные (например, «соответствующее ускорению управление», «соответствующее замедлению управление» и «управление по ΔN») в распределениях движущей силы рассчитываются на основе отдельных коэффициентов KABS1, KABS2, KABS3, KABS4, KABS5 и KABS6 усиления, которые увеличиваются в ответ на увеличение синтезированного ускорения GRES или µ поверхности дороги. Поэтому от дороги с низким µ до дороги с высоким µ возможно надлежащим образом выполнять управление распределением движущей силы левого и правого колес и управление распределением движущей силы передних и задних колес по отдельности. Более того, наряду с тем, что противоречие управления между управлением распределением движущей силой и управлением ABS в достаточной мере подавляется согласно уровню противоречия отдельного управления между различными управлениями и управлением ABS управление распределением движущей силы и управление ABS могут настолько правильно выполняться без какого бы то ни было снижения характеристик управления (например, поворотливости) и управления ABS, что управление ABS может быть предпочтительным в большей степени для дороги с низким µ.
В режиме управления по управлению распределением движущей силы уровень противоречия между управлением по ΔN и управлением ABS является особенно высоким, так что значение коэффициента усиления управления по ΔN, в целом, уменьшается. Выходные значения TC/D-DN и TR/D-DN, в целом, в значительной степени ограничены, так что управление ABS предпочтительно настолько высоко, насколько возможно. Поэтому наряду с достаточным подавлением противоречия управления между управлением распределением движущей силы и управлением ABS, при управлении ΔN управление распределением движущей силы и управление ABS могут выполняться надлежащим образом без какого-либо снижения характеристик управления (поворотливости).
Таким образом, даже если поверхность дороги относится к дороге со средним µ (например, поверхности влажной асфальтовой дороги или немощеной дороге), дороге с низким µ, такой как покрытая снегом дорога, или дороге с крайне низким µ (например, обледенелой дороге или ледяной дороге), управление распределением движущей силы может ограничиваться надлежащим образом без какого-либо противоречия управления между управлением распределением движущей силы и управлением ABS, наряду с предотвращением неустойчивости управления распределением движущей силы и управления ABS и управление ABS может быть предпочтительным, так что устойчивость поведений транспортного средства может улучшаться независимо от µ поверхности дороги.
Хотя описание варианта осуществления устройства распределения движущей силы согласно изобретению к этому моменту завершено, вариант осуществления не должен ограничиваться этим.
В варианте осуществления, например, механизм 19 распределения движущей силы передних и задних колес или механизм 15 распределения движущей силы левого и правого колес были применены в качестве механизма распределения движущей силы. Однако несмотря на это описание другой механизм (например, LSD с электронным управлением или сцепление с электронным управлением) также может применяться в качестве механизма распределения движущей силы, если он может изменять движущую силу, которая должна передаваться с двигателя на каждое колесо. Настоящее изобретение также может применяться к устройству распределения движущей силы левого и правого колес, которое раскрыто в JP-A-2005-289160.
Более того, в вышеупомянутом варианте осуществления управляемая переменная TC/D распределения движущей силы передних и задних колес и управляемая переменная TR/D распределения движущей силы левого и правого колес определяются из полных сумм отдельных управляемых переменных посредством использования сумматоров 51a, 52a, 51b и 52b, хотя не ограничено ими. Например, добавленное значение максимума любого из выходного значения TC/D-1 первого управления передними и задними колесами, и выходного значения TC/D-2 второго управления передними и задними колесами, и выхода TC/D-DN управления по ΔN передними и задними колесами может устанавливаться в качестве управляемой переменной TC/D распределения движущей силы передних и задних колес, а добавленное значение максимума любого из выходного значения TR/D-1 первого управления левым и правым колесами, и выходного значения TR/D-2 второго управления левым и правым колесами, и выхода TR/D-DN управления по ΔN левым и правым колесами может устанавливаться в качестве управляемой переменной TR/D распределения движущей силы левого и правого колес.
Более того, в вышеупомянутом варианте осуществления различные управления режимов управления по управлению распределением движущей силы проиллюстрированы «соответствующим ускорению управлением» (первым управлением передними и задними колесами, и первым управлением левым и правым колесами), «соответствующим замедлению управлением» (вторым управлением передними и задними колесами, и вторым управлением левым и правым колесами) и «управлением по ΔN» (управлением по ΔN передними и задними колесами, и управлением по ΔN левым и правым колесами), которыми режимы управления по управлению распределением движущей силы не должны ограничиваться.
Более того, вышеизложенный вариант осуществления был описан для случая, в котором управление распределением движущей силы выполняется механизмом 15 распределения движущей силы левого и правого колес на стороне задних колес 14. Однако также может быть создана конструкция из условия, чтобы система распределения движущей силы была оборудована механизмом распределения движущей силы левого и правого колес на стороне передних колес 8, чтобы, тем самым, выполнять управление распределением движущей силы.
Изобретение относится к устройству управления распределением движущей силы для надлежащего распределения движущей силы к отдельным ведущим колесам транспортного средства. Устройство содержит механизм распределения, контроллер распределения, антиблокировочную тормозную систему, детектор ускорения, вычислитель синтезированного ускорения, контроллер коэффициентов регулирования. Технический результат заключается в повышении устойчивости транспортного средства. 4 з.п. ф-лы, 2 ил.
1. Устройство управления распределением движущей силы, содержащее механизм распределения, выполненный с возможностью переменного распределения движущей силы от двигателя к отдельным ведущим колесам транспортного средства, контроллер распределения, выполненный с возможностью управления механизмом распределения на основании состояния движения транспортного средства, антиблокировочную тормозную систему, выполненную с возможностью приведения в действие при торможении транспортного средства для управления тормозными состояниями отдельных колес, тем самым управляя состояниями пробуксовки отдельных колес, детектор ускорения, выполненный с возможностью определения первого ускорения в направлении спереди-назад транспортного средства и второго ускорения в направлении слева-направо транспортного средства, вычислитель синтезированного ускорения, выполненный с возможностью вычисления синтезированного ускорения по первому ускорению и второму ускорению, и контроллер коэффициентов регулирования, выполненный с возможностью недискретного изменения коэффициентов регулирования для ограничения управления контроллера распределения, когда приведена в действие антиблокировочная тормозная система, согласно вычисленному синтезированному ускорению.
2. Устройство по п.1, в котором контроллер коэффициентов регулирования выполнен с возможностью увеличения коэффициентов регулирования, когда синтезированное ускорение становится большим для уменьшения предпочтения управления антиблокировочной тормозной системы.
3. Устройство по п.1, в котором механизм распределения содержит первый механизм распределения, выполненный с возможностью изменения значений движущих сил, распределенных на передние и задние колеса транспортного средства, и второй механизм распределения, выполненный с возможностью изменения значений движущих сил, распределенных на левые и правые колеса транспортного средства, при этом контроллер коэффициентов регулирования выполнен с возможностью изменения коэффициентов регулирования по отдельности для первого механизма распределения и второго механизма распределения, а контроллер распределения выполнен с возможностью индивидуального управления первым механизмом распределения и вторым механизмом распределения на основании коэффициентов регулирования.
4. Устройство по п.1, в котором контроллер распределения имеет множество режимов управления, при этом контроллер коэффициентов регулирования выполнен с возможностью изменения коэффициентов регулирования для каждого режима управления.
5. Устройство по п.4, в котором режимы управления включают в себя дифференциальное управление, при котором обеспечивается управление механизмом распределения в соответствии с разницей частоты вращения между передними и задними колесами и/или разницей частоты вращения между левым и правым колесами, а контроллер коэффициентов регулирования выполнен с возможностью уменьшения коэффициентов регулирования, так что дифференциальное управление ограничивается больше, чем другие режимы управления.
| US 2005085988 A1, 21.04.2005 | |||
| ЕР 0314452 A2, 03.05.1989 | |||
| DE 10138168 A1, 04.04.2002 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |

