Изобретение относится к области машиностроения, в частности к способам управления блокировками дифференциалов многоприводных колесных машин. Может быть использовано при проектировании систем регулирования распределения тяговых усилий на ведущих колесах многоприводных машин, а также при проведении исследований и испытаний колесных машин.
Известны способы управления режимами работы дифференциалов, заключающиеся в блокировании дифференциалов при достижении рассогласований кинематических параметров, в частности частот вращения элементов привода, связываемых этими дифференциалами ведущих колес на определенные промежутки времени [Ванцевич В.В., Высоцкий М.С., Гилелес Л.Х. Мобильные транспортные машины: Взаимодействие со средой функционирования. - Минск: Беларуская навука, 1998. - 303 с.].
Данный способ реализован в конструкции электронной системы регулирования распределения тяговых усилий «Авто-Лок» фирмы "International" [Disel and Turbine Progress. New Axle Lock System and Front Driving Axle. - 1979. - 21 p.] с управлением режимом работы межосевого дифференциала. Он позволяет исключить пробуксовку отдельных мостов многоприводных колесных машин при плохих погодных и неблагоприятных сцепных условиях и в результате повысить их проходимость и тягово-скоростные свойства.
Недостатком данного способа является то, что он не учитывает влияние блокировки дифференциалов на управляемость машины, которое при криволинейном движении многоприводной колесной машины может быть значительным. В результате реализация данного способа при криволинейном движении может существенным образом ухудшить управляемость и активную безопасность колесной машины.
Известен способ управления дифференциалами многоприводных колесных машин, заключающийся в блокировании дифференциалов на определенные промежутки времени при достижении пороговых значений рассогласований кинематических параметров связываемых этими дифференциалами ведущих колес, разблокировании дифференциалов по истечении определенных промежутков времени их блокировки или разблокировании одновременно всех при достижении порогового значения показателя управляемости [Ванцевич В.В., Высоцкий М.С., Закревский А.Д. Управление дифференциалами многоприводных колесных машин. / Научный центр проблем механики машин Академии наук Беларуси. - Минск, 1994. - 22 с.].
Данный способ управления дифференциалами позволяет исключить пробуксовку отдельных мостов и колес многоприводных колесных машин при плохих погодных и неблагоприятных дорожно-сцепных условиях с целью повышения их проходимости и тягово-скоростных свойств и обеспечить удовлетворительную управляемость, характеризуемую пороговым значением ее показателя.
Недостатком этого способа является узкий рабочий диапазон системы регулирования распределения тягового усилия, ограничиваемый условиями обеспечения удовлетворительной управляемости многоприводной колесной машины.
Наиболее близким по технической сущности к заявляемому решению является способ управления дифференциалами многоприводных колесных машин, заключающийся в блокировании дифференциалов на определенные промежутки времени при достижении пороговых значений рассогласований кинематических параметров связываемых ими ведущих колес и разблокировании дифференциалов по истечении определенных промежутков времени или при достижении порогового значения показателя управляемости. Причем разблокирование дифференциалов при достижении порогового значения показателя управляемости осуществляют индивидуально в последовательности, определяемой влиянием блокировки дифференциала на управляемость колесной машины, начиная с межтележечного дифференциала, блокировка которого оказывает наибольшее влияние на управляемость колесной машины [BY 10163 С1, 2007]. Указанный способ принят в качестве прототипа.
Данный способ управления дифференциалами позволяет значительно расширить рабочий диапазон системы регулирования распределения тяговых усилий для повышения проходимости и тягово-скоростных свойств при обеспечении требуемой управляемости многоприводных колесных машин.
Недостатком этого способа, как и предыдущего, является то, что в момент разблокирования дифференциалов, осуществляемого по истечении определенных промежутков времени после их блокирования, не учитывается состояние дорожно-сцепных условий под ведущими колесами, что в случае движения колесной машины в неблагоприятных дорожно-сцепных условиях приводит к повторному снижению тягового усилия и эффективности ее ходовой системы.
Задачей настоящего изобретения является повышение эффективности ходовой системы и тяговых свойств колесной машины за счет учета состояния текущих дорожно-сцепных условий под ведущими колесами в момент разблокирования дифференциалов и устранения раздельного буксования колес ведущих мостов при движении колесной машины в плохих дорожно-сцепных условиях.
Решение поставленной задачи достигается в способе управления дифференциалами многоприводных колесных машин, заключающимся в блокировании межосевых дифференциалов на определенные промежутки времени при достижении порогового значения рассогласований кинематических параметров связываемых ими ведущих колес и разблокировании дифференциалов, причем согласно техническому решению разблокирование межосевых дифференциалов осуществляют при снижении рассогласований кинематических параметров колес связываемых ими ведущих мостов ниже значений пороговых величин, определяемых из выражения:
где Δδs - пороговая величина рассогласований кинематических параметров колес ведущих мостов;
rj1 и rj2 - радиус качения внешнего и внутреннего по отношению к центру поворота колес j-го ведущего моста, соответственно, м;
νj1 и νj2 - скорость качения внешнего и внутреннего по отношению к центру поворота колес j-го ведущего моста соответственно при движении колесной машины по опорной поверхности со стабильными дорожно-сцепными условиями с максимальной скоростью, до которой осуществляется управление дифференциалами, м/с;
j - порядковый номер ведущего моста из числа связываемых соответствующим межосевым дифференциалом.
Заявляемый способ позволяет повысить эффективность ходовых систем многоприводных колесных машин за счет осуществления разблокирования дифференциалов по истечении определенных промежутков времени только после прохождения ведущими колесами участков опорной поверхности с плохими дорожно-сцепными условиями, предотвращения повторного раздельного буксования и рассогласований кинематических параметров ведущих мостов при прохождении одного и того же участка опорной поверхности с плохими дорожно-сцепными условиями.
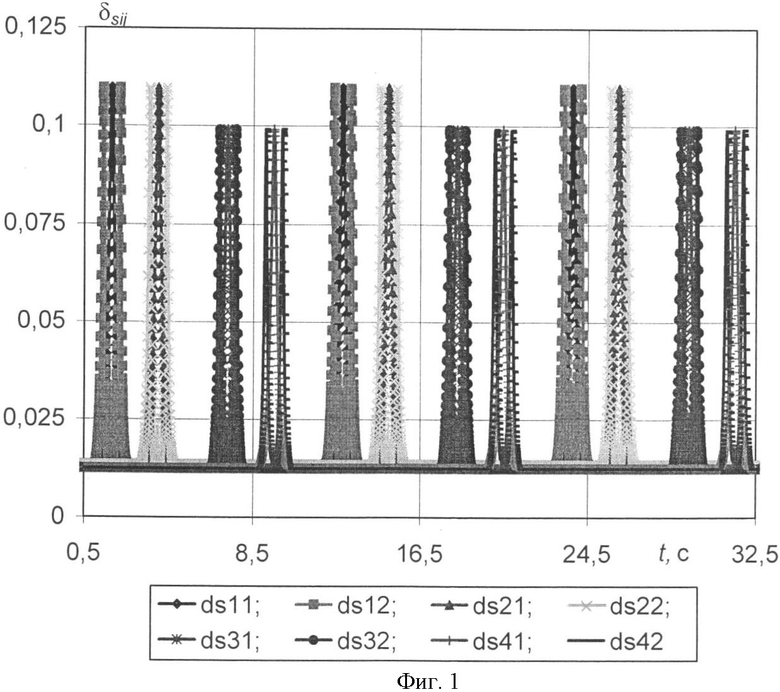
Изобретение поясняется фигурами. На фиг.1-3 представлены графические зависимости коэффициентов буксований ведущих колес от времени движения колесных машин 1, 2, 3 соответственно по поверхностям удовлетворительного состояния с участками с неблагоприятными дорожно-сцепными условиями. На фиг.4-6 представлены графические зависимости показателей эффективности ходовых систем колесных машин 1, 2, 3 соответственно от времени движения по поверхностям с неблагоприятными дорожно-сцепными условиями.
Пример реализации способа. Заявляемый способ оценивался расчетным методом в качестве алгоритма функционирования электронной системы регулирования тягового усилия внедорожной колесной машины МЗКТ-79091 полной массой 43,5 т с колесной формулой 8×8 и шинами 1500×600-635, построенной на управлении дифференциалами привода ведущих мостов.
Для компьютерного моделирования движения внедорожной машины МЗКТ-79091 составлялась математическая модель движения колесной машины 8×8 с использованием уравнений Аппеля [Высоцкий М.С., Дубовик Д.А. Математическое моделирование криволинейного движения колесных машин. // Вестник Белорусско-Российского университета. - 2008. - №2. - С.6-15.].
Моделирование движения осуществлялось по наиболее вероятной для движения внедорожных колесных машин грунтовой опорной поверхности в удовлетворительном состоянии (с коэффициентом сцепления ведущих колес с опорной поверхностью 0,6 и коэффициентом сопротивления качению колес 0,03) [Платонов В.Ф. Полноприводные автомобили. - 2-е изд., переработ, и доп. - М.: Машиностроение, 1989. - 312 с] со скоростью 1 м/с.
В качестве опорной поверхности с плохими дорожно-сцепными условиями при оценке эффективности предлагаемого способа принимались три последовательно расположенных участка опорной поверхности с различным образом изменяющимися значениями коэффициента сцепления ведущих колес разных бортов с опорной поверхностью от 0,6 до 0,1 общей протяженностью свыше 30 м.
Для сравнительной оценки эффективности предлагаемого способа осуществлялось моделирование трех колесных машин с одними и теми же массовыми, геометрическими и другими параметрами, близкими к параметрам внедорожной машины МЗКТ-79091, но с различным приводом ведущих колес.
В машине 1 моделировался простой симметричный дифференциальный привод ведущих мостов и колес.
В машине 2 моделировался простой симметричный дифференциальный привод ведущих мостов и колес с управлением межосевыми дифференциалами в соответствии со способом, принятым в качестве прототипа. В рассматриваемом примере блокирование управляемых дифференциалов у машины 2 осуществлялось на промежуток времени, равный 21 с.
В машине 3 моделировался простой симметричный дифференциальный привод ведущих мостов и колес с управлением дифференциалами в соответствии с заявляемым способом.
В качестве пороговой величины рассогласований кинематических параметров колес ведущих мостов для блокирования межосевых дифференциалов у машин 2 и 3 в настоящем примере принималось отношение буксований их колес. Численное значение пороговой величины отношения буксований принималось как равное или большее отношению коэффициентов буксований колес dsj1 и dsj2 ведущих мостов, обеспечивающему движение внедорожной машины МЗКТ-79091 по опорной поверхности со стабильными дорожно-сцепными условиями с дифференциальным приводом ведущих мостов без осуществления блокирования межосевых дифференциалов, и составляло 4,62.
Пороговое значение рассогласований кинематических параметров колес ведущих мостов для разблокирования межосевых дифференциалов машины 3 рассчитывалось в соответствии с выражением (1):
где Δδs=1,25 - значение пороговой величины рассогласований кинематических параметров колес ведущих мостов, принятой для оценки эффективности заявляемого способа в настоящем примере;
rj1=0,69 м и rj2=0,69 м - радиусы качения внешнего и внутреннего по отношению к центру поворота колес i-го ведущего моста соответственно;
νj1=5,49 м/с и νj2=4,51 м/с - скорость качения внешнего и внутреннего по отношению к центру поворота колес i-го ведущего моста соответственно при движении колесной машины по опорной поверхности со стабильными дорожно-сцепными условиями с максимальной скоростью, до которой осуществляется управление дифференциалами. В рассматриваемом примере значение максимальной скорости, до которой осуществляется управление дифференциалами внедорожной машины МЗКТ-79091, принималось равным 5 м/с;
j - порядковый номер ведущего моста из числа связываемых соответствующим межосевым дифференциалом.
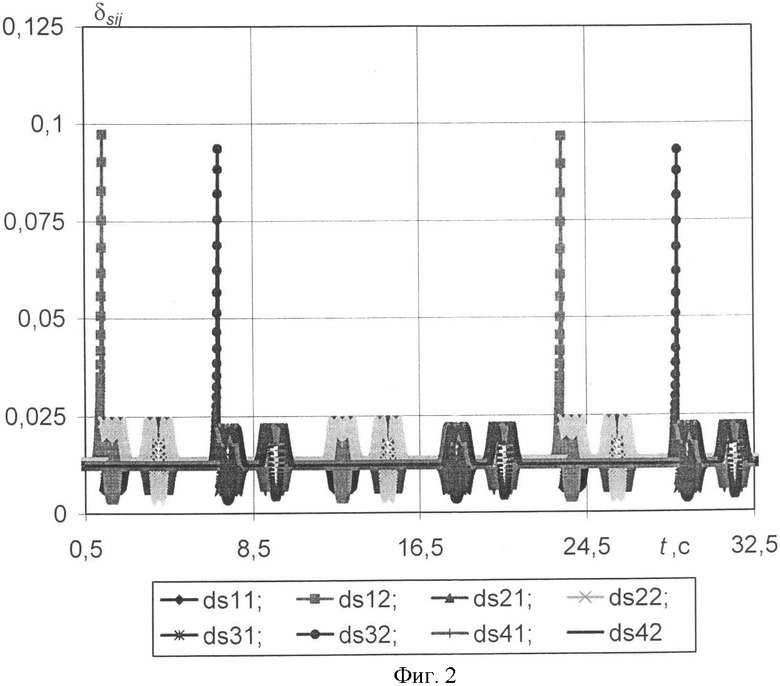
При проведении исследований были установлены графические зависимости коэффициентов буксований dsj1 и dsj2 ведущих колес машин 1, 2, 3 соответственно от времени движения по опорным поверхностям удовлетворительного состояния с участком с плохими дорожно-сцепными условиями (фиг.1-3).
Анализ зависимостей на фиг.1 показывает, что при движении многоприводной колесной машины 1 с простым симметричным дифференциальным приводом по участку опорной поверхности с плохими дорожно-сцепными условиями происходит раздельное буксование ведущих колес. Значения коэффициентов буксований dsj1 и dsj2 ведущих колес машины 1 изменяются со значений, равных 0,0124…0,0134, при движении по грунтовой опорной поверхности удовлетворительного состояния до значений 0,099…0,1096 при прохождении участка опорной поверхности с плохими дорожно-сцепными условиями. Наибольшее увеличение значений коэффициентов буксований соответствуют колесам первого и второго ведущих мостов с меньшей нормальной нагрузкой.
Из фиг.2 следует, что раздельное буксование ведущих мостов у многоприводной колесной машины 2 с управлением дифференциалами в соответствии со способом, принятым в качестве прототипа, ограничивается пороговым значением, задаваемым в программном обеспечении электронного блока управления системы регулирования тягового усилия.
При попадании колес ведущего моста на участок опорной поверхности с плохими дорожно-сцепными условиями значения их коэффициентов буксования увеличиваются до диапазона от 0,0839 до 0,0973. При достижении отношения буксований порогового значения происходит блокирование межосевого дифференциала передней ведущей тележки, колес третьего и четвертого ведущих мостов - межосевого дифференциала задней ведущей тележки. Реализация в дальнейшем в течение 21 с блокированного привода ведущих мостов приводит к ограничению коэффициентов буксований dsj1 и dsj2 колес ведущих мостов до значений 0,0218…0,0237 и положительным образом сказывается на повышении проходимости и тягово-скоростных свойств внедорожных колесных машин по отношению к внедорожной колесной машине с простым дифференциальным приводом.
По истечении 21 с после блокирования межосевых дифференциалов передней и задней тележки в соответствии со способом, принятым в качестве прототипа, происходит их разблокирование вне зависимости от текущего состояния дорожно-сцепных условий под ведущими колесами машины 2. Последовавшее разблокирование дифференциалов при продолжении движения колесной машины по участку опорной поверхности с плохими дорожно-сцепными условиями приводит к повторному увеличению коэффициентов буксований колес первого и третьего ведущих мостов, возникновению рассогласования кинематических параметров колес ведущих мостов и, как следствие, к снижению уровня реализации опорной проходимости и тягово-скоростных свойств машины. При достижении отношения коэффициентов буксований колес первого и второго ведущих мостов, третьего и четвертого ведущих мостов пороговой величины 4,62 осуществляется повторное блокирование соответствующих межосевых дифференциалов передней и задней ведущих тележек на следующий конечный промежуток времени. Таким образом способ, принятый в качестве прототипа, приводит к разблокированию привода ведущих колес при движении в плохих дорожно-сцепных условиях и увеличению вероятности потери колесной машиной подвижности.
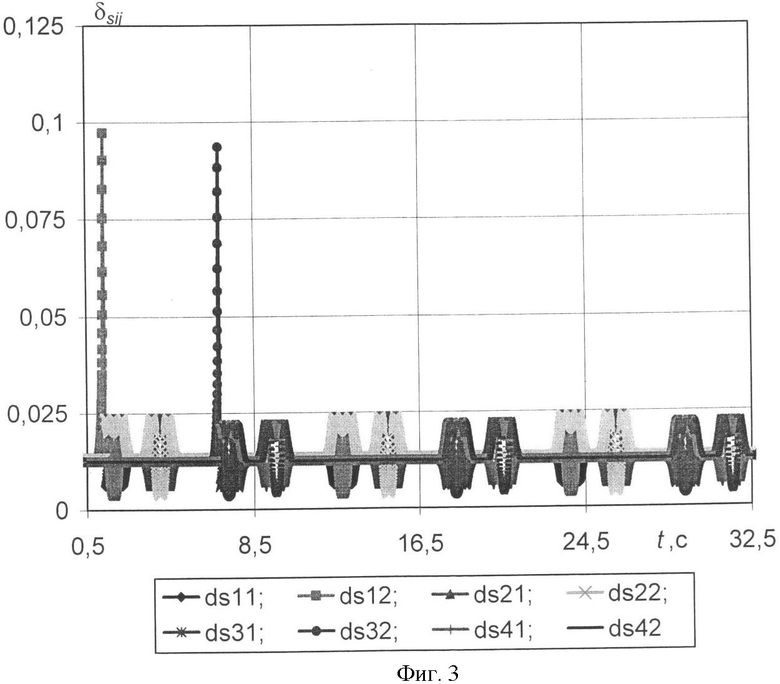
Зависимости на фиг.3 свидетельствуют о том, что у машины 3 с управлением дифференциалами в соответствии с заявляемым способом раздельное буксование или же рассогласование других кинематических параметров ведущих колес реализуется только в начале движения колесной машины по участку опорной поверхности с плохими дорожно-сцепными условиями. Раздельное буксование происходит только в момент установления наличия участка опорной поверхности с плохими дорожно-сцепными условиями под ведущими колесами.
При въезде ведущих колес на участок опорной поверхности с плохими дорожно-сцепными условиями у машины 3, как и у машины 2, происходит увеличение коэффициентов буксований колес первого, а затем и третьего ведущего моста и возникновение рассогласований кинематических параметров ведущих мостов. При достижении рассогласования кинематических параметров ведущих мостов порогового значения, соответствующего отношению коэффициентов буксований, равному 4,62, происходит блокирование соответственно межосевых дифференциалов передней и задней ведущих тележек. В результате увеличение коэффициентов буксования колес первого ведущего моста ограничивается диапазоном значений от 0,0839 до 0,0973 при определении участка опорной поверхности с плохими дорожно-сцепными условиями под ведущими колесами машины для блокирования управляемых дифференциалов. Максимальные значения коэффициентов буксований при дальнейшем движении по участку опорной поверхности с плохими дорожно-сцепными условиями до полного его прохождения ограничивается значениями 0,0218…0,0237. Разблокирование межосевых дифференциалов не происходит, потому что значения рассогласований колес связываемых ими ведущих мостов в заданном промежутке времени, свидетельствующем о прохождении колесной машиной участка опорной поверхности с плохими дорожно-сцепными условиями, превышают пороговую величину Δδs.
Таким образом реализуется управление дифференциалами многоприводных колесных машин в соответствии с заявляемым способом, которое позволяет исключить повторное возникновение раздельного буксования и разблокирование привода колес ведущих мостов при преодолении участка опорной поверхности с плохими дорожно-сцепными условиями. Это обеспечивает колесной машине высокий уровень реализации опорной проходимости и тягово-скоростных свойств и уменьшает вероятность потери ею мобильности.
В качестве показателя эффективности ходовой системы многоприводной колесной машины использовался следующий количественный показатель, по своей структуре соответствующий требованиям, предъявляемым к коэффициентам полезного действия:
где ηrsα _ показатель эффективности ходовых систем колесных машин [Высоцкий М.С., Дубовик Д.А. Коэффициент полезного действия ходовых систем колесных машин. // Доклады НАН Беларуси. - 2007. - Т.51, №2. - С.91-94];
Nkα - мощность, расходуемая ходовой системой на осуществление движения машины в направлении, задаваемом водителем поворотом рулевого колеса, Вт;
Nk - мощность, передаваемая ходовой системе, Вт;
Nkαj1 и Nkαj2 - мощность, расходуемая соответственно левым и правым колесами j-го моста на осуществление движения машины в направлении, задаваемом водителем поворотом рулевого колеса (индексы 1 и 2 относятся соответственно к правому и левому колесу моста), Вт;
Nkj1 и Nkj2 - мощность, подведенная соответственно к левому и правому колесу j-го моста, Вт;
n - количество ведущих мостов колесной машины.
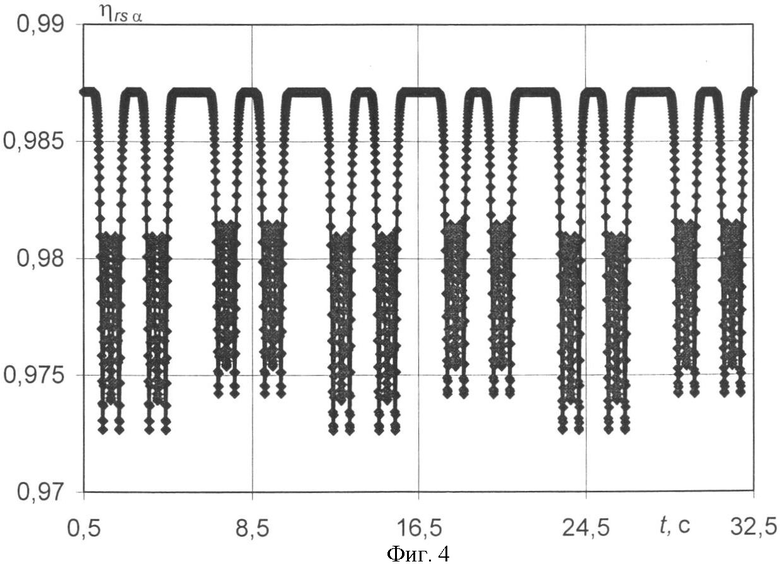
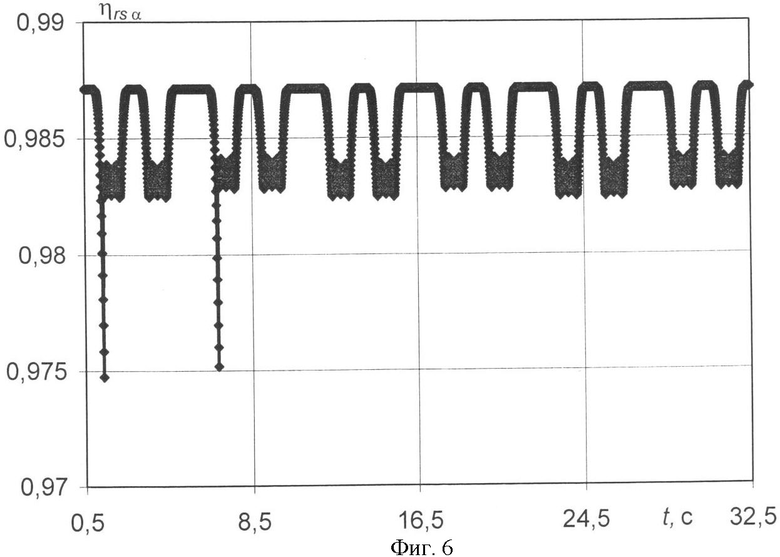
Для оценки эффективности заявляемого способа рассмотрим зависимости изменения показателя ηrsα (2) от времени движения многоприводной колесной машины по опорной поверхности с участком с плохими дорожно-сцепными условиями, приведенные на фиг.4-6.
Анализ зависимости на фиг.4 показывает, что у многоприводной колесной машины 1 с простым симметричным дифференциальным приводом ведущих мостов и колес показатель ηrsα при движении по опорной поверхности удовлетворительного состояния составляет 0,987. При преодолении участка опорной поверхности с плохими дорожно-сцепными условиями показатель ηrsα снижается до диапазона значений 0,9737…0,9742. Снижение показателя ηrsα на 0,0128…0,0133 объясняется увеличением буксований ведущих колес, движущихся в соответствующий момент времени по участку опорной поверхности с уменьшенным коэффициентом сцепления.
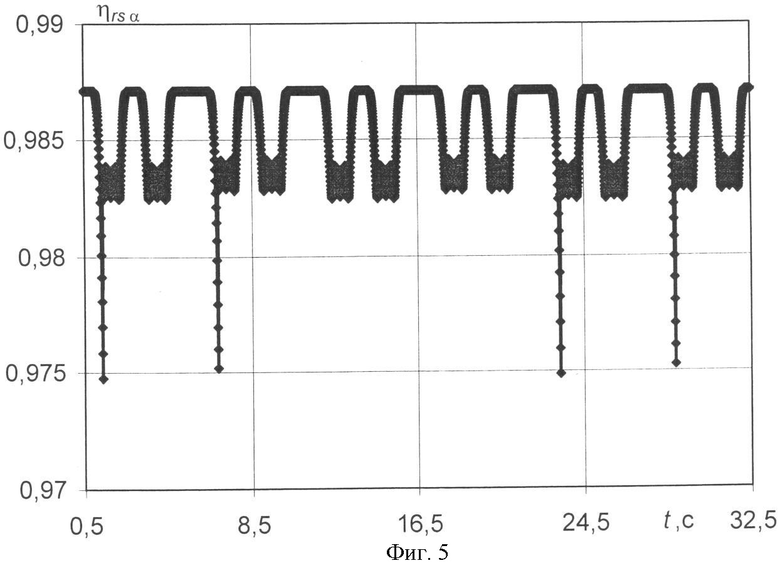
У многоприводной колесной машины 2 с управлением дифференциалами в соответствии со способом, принятым в качестве прототипа, снижение показателя эффективности ηrsα происходит неоднократно. Снижение эффективности происходит при определении колесами первого и третьего ведущих мостов начала участка опорной поверхности с плохими дорожно-сцепными условиями, а также при движении по участку с плохими дорожно-сцепными условиями всякий раз при разблокировании дифференциалов по истечении промежутков времени, на которые они были заблокированы (фиг.5). Снижение показателя ηrsα у машины 2 ограничивается блокированием дифференциалов ведущих мостов, которое осуществляется при достижении пороговых отношений коэффициентов буксования величины их ведущих колес. Снижение показателя ηrsα у машины 2 происходит до значений 0,9747 и 0,9742 при попадании соответственно колес первого и третьего ведущих мостов на участок с плохими дорожно-сцепными условиями.
При движении многоприводной колесной машины 3 (фиг.6) с управлением дифференциалами в соответствии с заявляемым способом снижение показателя ηrsα вследствие раздельного буксования ведущих колес до значения, численно равного 0,9747, происходит только при въезде на участок опорной поверхности с плохими дорожно-сцепными условиями. При достижении отношения коэффициентов буксований ведущих колес первого и второго ведущих мостов пороговой величины, равной 4,62, осуществляется блокирование межосевого дифференциала передней тележки. При достижении отношения коэффициентов буксований ведущих колес третьего и четвертого ведущих мостов пороговой величины, равной 4,62, осуществляется блокирование межосевого дифференциала задней тележки. Дальнейшее движение машины 3 по участку с плохими дорожно-сцепными условиями осуществляется с заблокированными межосевыми дифференциалами передней и задней тележки. Причем в отличие от машины 2 у машины 3 разблокирование дифференциалов осуществляется не по истечении заданных промежутков времени после их блокирования, а по истечении заданных промежутков времени при снижении рассогласований кинематических параметров колес ведущих мостов значений ниже пороговой величины Δδs, что является характерным признаком преодоления машиной участка опорной поверхности с плохими дорожно-сцепными условиями. В результате предотвращения снижение эффективности привода ведущих мостов вследствие разблокирования межосевых дифференциалов во время движения колесной машины по участку опорной поверхности с плохими дорожно-сцепными условиями.
Таким образом, практическая реализация разработанного способа позволяет повысить эффективность ходовой системы, опорной проходимости и тягово-скоростные свойства многоприводных колесных машин за счет учета состояния текущих дорожно-сцепных условий и исключения многократного раздельного буксования колес ведущих мостов при движении в плохих дорожно-сцепных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛАМИ МНОГОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2008 |
|
RU2361752C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛАМИ МНОГОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2005 |
|
RU2298486C1 |
| СПОСОБ УПРАВЛЕНИЯ БУКСОВАНИЕМ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2433925C1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЛНОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2000 |
|
RU2187436C2 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| Способ определения кинематического рассогласования в трансмиссиях многоосных полноприводных колесных машин | 2017 |
|
RU2657136C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
Изобретение относится к области машиностроения, в частности к способам управления блокировками дифференциалов многоприводных колесных машин. Способ управления дифференциалами многоприводных колесных машин заключается в блокировании межосевых дифференциалов на определенные промежутки времени при достижении порогового значения рассогласований кинематических параметров связываемых ими ведущих колес и разблокировании дифференциалов. Причем разблокирование межосевых дифференциалов осуществляют при снижении рассогласований кинематических параметров ведущих колес ниже значений, определяемых формулой. Достигается повышение эффективности ходовой системы и тяговых свойств колесной машины. 6 ил.
Способ управления дифференциалами многоприводных колесных машин, заключающийся в блокировании межосевых дифференциалов на определенные промежутки времени при достижении порогового значения рассогласований кинематических параметров связываемых ими ведущих колес и разблокировании дифференциалов, отличающийся тем, что разблокирование межосевых дифференциалов осуществляют при снижении рассогласований кинематических параметров колес связываемых ими ведущих мостов ниже значений пороговых величин, определяемых из выражения:
где Δδs - пороговая величина рассогласований кинематических параметров колес ведущих мостов;
rj1 и rj2 - радиус качения внешнего и внутреннего по отношению к центру поворота колес j-го ведущего моста, соответственно, м;
vj1 и vj2 - скорость качения внешнего и внутреннего по отношению к центру поворота колес j-го ведущего моста соответственно при движении колесной машины по опорной поверхности со стабильными дорожно-сцепными условиями с максимальной скоростью, до которой осуществляется управление дифференциалами, м/с;
j - порядковый номер ведущего моста из числа связываемых соответствующим межосевым дифференциалом.
| Способ управления блокируемым дифференциальным приводом колес транспортного средства и устройство для его осуществления | 1983 |
|
SU1130501A1 |
| RU 2007104130 A, 10.08.2008 | |||
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303537C1 |
| JP 10264673 A, 06.10.1998 | |||
| JP 2007186011 A, 26.07.2007. | |||

