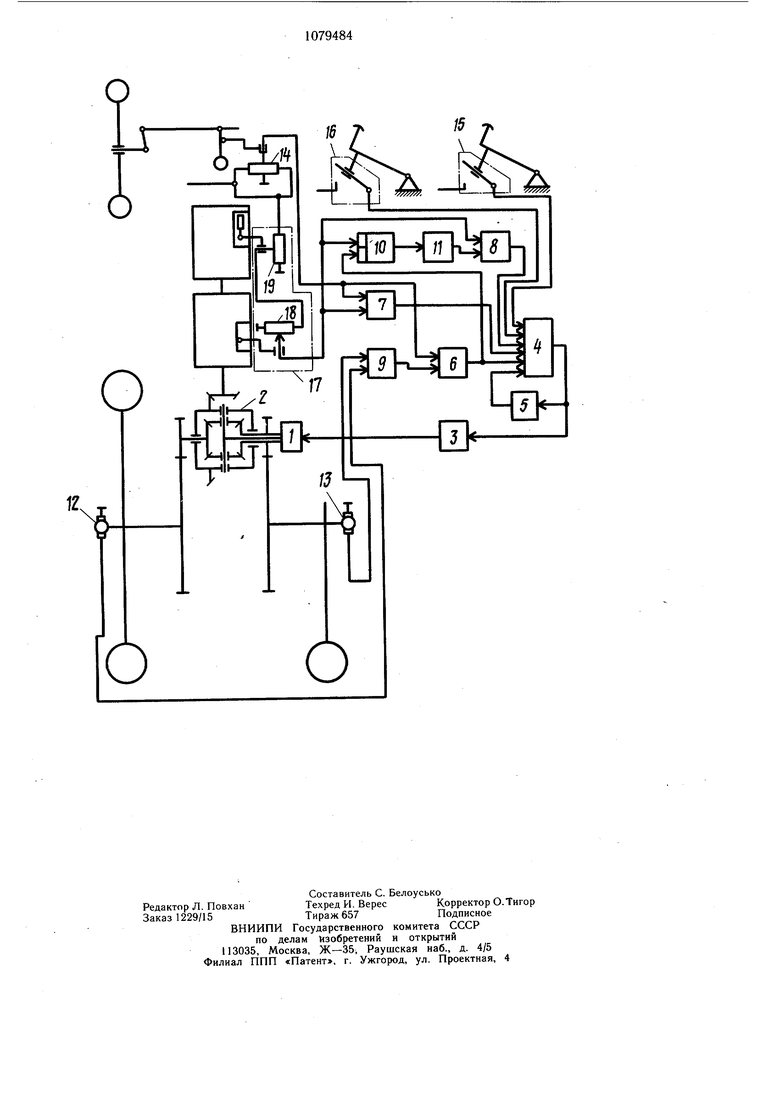
Изобретение относится к транспортному машиностроению, а именно к системам управления трансмиссиями, и касается блокировки дифференциала ведущего моста тягового колесного средства. Известна система автоматического управления дифференциалом ведущего моста колесного средства, содержащая фрикционную муфту, управляемую сервомеханизмом, подключенным через сравнивающие и пороговые устройства к датчикам скоростей вращения колес и крутящих моментов и имеющая регулируемый потенциометр, включенный в цепь сигнала датчиков скоростей вращения колес между сравнивающим и пороговым устройством, подвижный элемент которого кинетически связан с рулевым устройством 1. Недостатком этой системы является то, что она -не обеспечивает блокировку дифференциала при разгоне и торможении тягового колесного средства, а также при работе его с определенной крюковой нагрузкой в одинаковых тягово-сцепных условиях левого и правого ведущих колес, кроме того, для измерения крутящих моментов на полуосях неизвестны датчики, обладающие достаточной надежностью и долговечностью в условиях сельскохозяйственного производства. Известна также система автоматического управления дифференциалом ведущего моста тягового колесного средства, содержа,, щая гидроуправляемую фрикционную муфту, соединенную через электрогидравлическии усилитель с выходом многовходового элемента ИЛИ, один из входов которого посредством первого порогового устройства и сравнивающего устройства .подключен к датчикам скоростей вращения ведущих колес и к первому регулируемому потенциометру, подвижный элемент которого кинематически связан с рулевым механизмом, выход первого регулируемого потенциометра соединен также с вторым пороговым устройством, установленным в цепи связи одного из входов многовходового элемента ИЛИ с блоком определения сигнала о величине крутящего момента на ведущих полуосях, кроме того, один из входов многовходового элемента ИЛИ соединен с выходом этого элемента посредством реле времени, причем блок определения сигнала о величине крутящего момента на полуосях представляет собой электрически последовательно соединенные регулируемые потенциометры, вход одного из которых соединен с источником постоянного напряжения, а подвижные элементы потенциометров кинематически связаны соответственно с рейкой топливного насоса и рычагом переключения передач 2. В известной системе разблокирование дифференциала происходит после срабатывания реле времени, если же не преодолен участок с различными сцепными характеристиками, то система вновь блокирует дифференциал после появления разности скоростей вращения полуосей, что снижает тягово-сцепные характеристики тягового средства. Блокирование дифференциала значительно повыщает устойчивость движения при торможении, поскольку разность тормозных моментов левого и правого бортов обуславливает поворачивающий момент, вызывающий неуправляемый поворот тягового средства. Кроме того, блокирование ведущего моста улучщает характеристики разгона тягового средства, так как в период разгона трансмиссией передается повышенный крутящий момент, вызывающий значительное буксование и нагруженность. Известная система не обеспечивает блокировку дифференциала до преодоления участка с различными тягово-сцепными характеристиками бортов тягового средства, а также при торможении и разгоне. Цель изобретения - улучшение тяговоэксплуатационных характеристик колесного средства путем обеспечения блокировки дифференциала до преодоления тяжелого дорожногО участка, а также при разгоне и торможении. Поставленная цель достигается тем, что система автоматического управления дифференциалом ведущего моста колесного тягового средства, содержащая гидроуправ фрикционную муфту, подключенную через электрогидравлический усилитель к выходу многовходового элемента ИЛИ, один из входов которого посредством первого порогового устройства и сравнивающего устройства подключен к датчикам скоросстей вращения ведущих колес и к регулируемому потенциометру, подвижный элемент которого кинематически связан с рулевым механизмом, выход регулируемого потенциометра соединен с пороговым устройством, установленным в цепи связи одного из входов многовходового элемента ИЛИ с блоком определения сигнала о величине крутящего момента на ведущих полуосях, кроме того, один из входов многовходового элемента ИЛИ соединен с выходом этого элемента посредством реле времени, причем блок определения сигнала о величине крутящего момента на ведущих полуосях представляет собой электрически последовательно соединенные регулируемые потенциометры, вход одного из которых соединен с источником постоянного напряжения, а подвижные элементы потенциометров кинематически связаны соответственно с рейкой топливного насоса и рычагом переключения передач, снабжена датчиками положения педалей муфты сцепления и тормоза, подключенными к двум входам многовходового элемента ИЛИ, ключом, запоминающим устройством и тре3тьим пороговом устройством, причем управляющий вход ключа соединен с выходом первого порогового устройства, а рабочий вход ключа подключен к выходу блока определения сигнала о величине крутящего момента на ведущих полуосях, а выход ключа посредством запоминающего устройства подключен к одному из входов третьего порогового устройства, другой вход которого соединен с рабочим входом ключа, а выход третьего порогового устройства10 подключен к одному из входов элемента ИЛИ. На чертеже изображена схема системы автоматического управления дифференциалом тягового колесного средства. Система содержит фрикционную гидро-5 управляемую муфту 1, блокирующую дифференциал 2, соединенную через гидравлический многовходовый усилитель 3, например щестивходовый элемент ИЛИ 4, реле времени 5, первое 6, второе 7 и третье 8 пороговые устройства, сравнивающее устройство 9, ключ 10 и запоминающее устройство 11 с датчиками 12 и 13 скоростей вращения ведущих колес, регулируемым потенциометром 14, подвижный элемент которого кинематически связан с рулевым25 управлением, датчиками 15 и 16 положения соответственно педалей муфты сцепления и тормоза и с выходом блока 17 определения сигнала-аналога крутящего момента на полуосях, выполненного в виде последовательно соединенных датчиков включенной30 передачи 18 и нагрузки двигателя 19. ,-, Два входа шестивходового элемента ИЛИ 4 соединены с датчиками 15 и 16 положения педалей муфты сцепления и тормоза, параллельно подключенными к ис-35 точнику постоянного напряжения Три .входа щестивходового элемента ИЛИ 4 соединены с вь1ходами первого 6, второго 7 и третьего 8 пороговых устройств.- Первое пороговое устройство 6 соединено с выходами датчика 14 и сравнивающего устрой-40 ства 9, входы которого подключены к выходам датчиков 12 и 13. Второе пороговое устроиство 7 соединено с выходами датчиков 14 и 18. Третье пороговое устройство 8 соединено с выходами датчика 18 и запоминающего устройства 11, вход которого посредством ключа 10, управляемого сигналом с выхода первого порогового устройства 6, соединен с выходом датчика 18. На последний вход щестивходового элемента ИЛИ 4 включено реле времени 5,50 вход которого соединен с выходом элемента ИЛИ 4. Последовательное соединение регулируемых потенциометров 18 и 19, когда выход одного из регулируемых потенциометров, например 19, связан с входом регулируемого потенциометра 18, а вход -55 с источником постоянного напряжения, обеспечивает пропорциональность выходного сигнала регулируемого потенциометра 18 0794 4 4 суммарному крутящему моменту на полуосях или крюковой нагрузке тягового колесного средства. Система работает следующим образом, Шестивходовый элемент ИЛИ 4 выдает командный сигнал к электрогидравлическому усилителю 3 и муфте 1 на блокировку дифференциала 2 при появлении ступенчатого сигнала хотя бы на одном из его щести входов. На первом или втором входе появляются сигналы датчиков 15 и 16 при выключенной муфте сцепления или включении тормозов, т.е. в момент начала разгона или при торможении колесного тягового средства. После отпускания водителем педалей выключения муфты сцепления тормоза дифференциал 2 остается включенным некоторое время, необходимое для разгона колесного средства благодаря наличию на шестом входе элемента ИЛИ 4 сигнала, поступающего от реле времени 5. На пятом входе появляется сигнал при превыщении установленной разности, определенной сравнивающим устройством 9, сигналов датчиков 12 и 13 скоростей вращения ведущих колес порогового значения, определенного с учетом значения сигнала, пропорционального отклонению рулевого управления, который поступает от регулируемого потенциометра 14. На четвертом входе элемента ИЛИ 4 появляется сигнал, если крюковая нагрузка станет больще заранее установленной, с учетом угла поворота управляемых колес, т.е. с учетом значения сигнала, поступающего от датчика 14. На третьем входе элемента ИЛИ 4 появляется и присутствует ступенчатый „ У .е .значение сигнала о величине крутящего момента на полуосях с датчика 18 превосходит записанное в запоминающее устрой j j мент, когда появился сигнал на первого порогового устройства 6. значение сигнала от датчика 18 ста меньше значения, записанного в запо. устройстве И, ступенчатый сиг„g „ третьем входе элемента ИЛИ 4 , а память запоминающего устрой ц освобождается от записанной в ней информации При движении тягового колесного средства по твердой дороге без буксования колес с нагрузкой, меньшей порогового значения, при отсутствии управляющих воздействий водителя на педали муфты сцеп- ия и тормоза, на входах многовходового элемента ИЛИ 4 сигналов нет, на его выходе также нет командного сигнала, дифференциал 2 разблокирован. При трогании с места и разгоне, когда водитель выжимает педаль 15 муфты сцепления, на первом входе элемента ИЛИ 4 появляется ступенчатый сигнал, вследствие чего командный сигнал появляется на выходе элемента ИЛИ 4, усиленный в электрогидравлическом усилителе 3 включает фрикционную муфту 1, блокирующую дифференциал 2, Одновременно с появлением командного сигнала на выходе элемента ИЛИ 4 этот сигнал подается на вход реле времени 5, вызывая появление на его выходе и, следовательно, на шестом входе элемента ИЛИ 4 ступенчатого сигнала. После отпускания водителем педали 15 муфты сцепления ступенчатый сигнал на первом входе элемента ИЛИ 4 исчезает. Однако на выходе реле времени 5 сигнал еще наблюдается определенное время, благодаря этому дифференциал 2 остается заблокированным некоторое время, пока происходит разгон колесного тягового средства. При торможении водитель выжимает педаль тормоза и на втором входе элемента ИЛИ 4 появляется поступающий от датчика 16 ступенчатый сигнал, вызывающий появление командного сигнала на его выходе и, следовательно, блокирование дифференциала 2. Благодаря срабатыванию реле времени 5 дифференциал 2 остается заблокированным некоторое время после отпускания водителем педали тормоза. Если скорость вращения одного из ведущих колес увеличивается вследствие попадания его на скользкий участок опорной поверхности, на выходе сравнивающего устройства 9 появляется сигнал, величина которого равна разности величин сигналов датчиков 12 и 13 скоростей вращения ведущих колес. При превышении этой разностью порогового значения на выходе первого порогового устройства 6 появляется ступенчатый сигнал, который, поступая на пятый вход шестивходового элемента ИЛИ 4, вызывает появление командного сигнала на его выходе. Этот сигнал, усиленный электрогидравлическим усилителем 3, включает фрикционную муфту 1, дифференциал 2 блокируется. Одновременно с появлением командного сигнала на выходе элемент 4 этот сигнал подается на вход реле времени 5, вызывая появление на его выходе ступенчатого сигнала. После блокировки дифференциала скорости вращения ведущих колес выравниваются, значения сигналов датчиков 12 и 13 стают одинаковыми, на выходе первого порогового устройства 6 и на пятом входе шестивходового элемента ИЛИ 4 сигнал пропадает. Однако на выходе реле времени 5 сигнал еще наблюдается определенное время, необходимое на преодоление скользского участка дороги, что обеспечивает с помощью щестивходового элемента ИЛИ 4, электрогидравлического усилителя 3 и фрикционной муфты I блокировку дифференциала 2. Одновременно с подачей ступенчатого сигнала с выхода первого порогового устройства 6 на пятый вход щестивходового элемента ИЛИ 4 он подается на управляющий вход ключа 10. Ключ открывается, и в запоминающее устройство 11 поступает сигнал о величине крутящего момента на полуосях при появлении разности скоростей вращения полуосей. Значение сигнала записывается, сравнивается с текущим значением нагрузки посредством третьего порогового устройства 8, на выходе которого наблюдается ступенчатый сигнал. Текущее значение нагрузки превышает значение, записанное в запоминающем устройстве 11, т.е. пока дорожные условия остаются достаточно тяжелыми. Дифференциал 2 при этом заблокирован. Когда же значение нагрузки на полуосях снизится настолько, что станет меньше значения, записанного в запоминающее устройство 11, на выходе порогового устройства 8 сигнал пропадает и, если на всех прочих входах щестивходового элемента ИЛИ 4 сигналы также отсутствуют, дифференциал 2 разблокируется. При работе колесного тягового средства со значительной тяговой нагрузкой, превосходящей пороговое значение второго порогового устройства 7, на выходе этого устройства появляется сигнал, который, поступая на четвертый вход элемента ИЛИ 4 электрогидравлический усилитель 3 и гидвызывает блокироуправляемую муфту 1, ровку дифференциала 2. Выполненная таким образом система автоматического управления дифференциалом ведущего моста обеспечивает продолжительный режим движения тягового колесного средства с заблокированным дифференциалом при значительной крюковой нагрузке, при наличии тяжелых дорожных условий, движение с заблокированным дифференциалом при разгоне и торможений даже при одинаковых, скоростях вращения ведущих колес, что улучшает в 1,5-2,5 раза устойчивость прямолинейного движения. Это обуславливает повыщение эксплуатационной скорости движения машинно-тракторных агрегатов с тяговым колесным средством и, следовательно, производительности труда на 4-5%, снижение расхода топлива до 5%, кроме того, улучшаются условия труда механизатора, так кaк уменьшаются психо-физические нагрузки на управление агрегатом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1982 |
|
SU1041328A1 |
| Автоматическое устройство управления дифференциалом ведущего моста транспортного средства | 1985 |
|
SU1301731A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU612838A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU593944A1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2265766C1 |
| Система автоматического управления дифференциалом ведущего моста колесной машины | 1977 |
|
SU673483A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242655C2 |
| Мобильное энергетическое средство | 1987 |
|
SU1416342A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛОМ ВЕДУЩЕГО МОСТА ТЯГОВОГО КОЛЕСНОГО СРЕДСТВА, содержащая гидроуправляемую фрикционную муфту, подключенную через электрогидравлический усилитель, к выходу многовходового элемента ИЛИ, один из входов которого посредством первого порогового устройства и сравнивающего устройства подключен к датчикам скоростей вращения ведущих колес и к регулируемому потенциометру, подвижный элемент которого кинематически связан с рулевым механизмом, выход регулируемого потенциометра соединен с вторым пороговым устройством, установленным в цепи связи одного из входов многовходового элемента ИЛИ с блоком определения сигнала о величине крутящего момента на ведущих полуосях, кромв того, один из входов многовходового элемента ИЛИ соединен с выходом этого элемента посредством реле времени, причем блок определения сигнала о величине крутящего момента на ведущих полуосях представляет собой электрически последовательно соединенные регулируемые потенциометры, вход одного из которых соединен с источником постоянного напряжения, а подвижные элементы потенциометров кинематически связаны соответственно с рейкой топливного насоса и рычагом переключения передач, отличающаяся тем, что, с целью улучшения тягово-эксплуатационных характеристик колесного средства путем обеспечения блокировки, дифференциала при разгоне и торможении, а также до преодоления тяжелого дорожного участка, она снабжена С датчиками положения педалей муфты сцеп ления и тормоза, подключенными к двум (Л входам многовходовогЬ элемента ИЛИ, ключом, запоминающим устройством и третьим пороговым устройством, причем управляющий вход ключа соединен с выходом первого порогового устройства, а рабочий вход ключа подключен к выходу блока определения сигнала о величине крутящего момента на ведущих полуосях, причем выход ключа посредством запоминающего устрой ства подключен к одному из входов тресо тьего порогового устройства, другой вход 4: которого соединен с рабочим входом ключа, 00 4 а выход третьего порогового устройства подключен к одному из входов элемента ИЛИ.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU612838A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3419517/11, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
