Изобретение относится к радиолокационным устройствам и может быть использовано для распознавания классов летательных аппаратов (ЛА).
Известно радиолокационное устройство распознавания целей [1], содержащее антенну, гетеродин, цифровое управляющее устройство, передатчик, соединенный с его выходом своим входом антенный переключатель, причем вход-выход антенны соединен с вход-выходом антенного переключателя, а также последовательно соединенные усилитель высокой частоты, первый смеситель, усилитель промежуточной частоты, автоматический фильтр распознавания цели, амплитудный детектор, индикатор, кроме того, выход антенного переключателя подключен к входу усилителя высокой частоты, а гетеродин соединен своим выходом с входом первого смесителя, кроме того, цифровое управляющее устройство подключено своим выходом к второму входу автоматического фильтра распознавания цели.
Это устройство обеспечивает распознавание классов ЛА по структуре их дальностных портретов [2]. Портреты формируются радиолокационной станцией [1] за счет высокой разрешающей способности по дальности, составляющей величину порядка 1 м. Однако признак распознавания в виде дальностного портрета (ДП) инвариантен к поперечной относительно линии визирования цели (ЛВЦ) геометрии ЛА в квазиоптической области отражения. В результате объекты, схожие по структуре в продольном направлении, но различающиеся в поперечном направлении, данным устройством будут относиться к одному и тому же классу. К тому же ДП является информативным только на атакующих курсовых углах, а при курсовых углах порядка π/2 многие ЛА имеют идентичные нормированные ДП. Как следствие вероятность распознавания ЛА на боковых ракурсах будет существенно снижаться. Поэтому эффективность устройства [1] является недостаточной и нуждается в повышении.
Известно также радиолокационное устройство распознавания летательных аппаратов [3], включающее антенну, соединенную своим вход-выходом с вход-выходом антенного переключателя, вход которого подключен к выходу усилителя мощности, первый вход которого соединен с выходом импульсного модулятора, вход которого связан с выходом синхронизатора и входом генератора линейно-частотно-модулированного сигнала (ЛЧМ-сигнала), выход которого соединен с первым входом второго смесителя, выход которого связан со вторым входом усилителя мощности, а второй вход - с выходом опорного генератора и первым входом первого смесителя, второй вход которого подключен к выходу антенного переключателя, а выход - ко входу усилителя промежуточной частоты (УПЧ), выход которого связан со входом амплитудного детектора (АД), выход которого подключен ко входу первой линии задержки (ЛЗ), второму входу первого сумматора, входу второй ЛЗ, второму входу второго сумматора и входу второго интегратора, выход которого связан с первым входом блока деления, выход которого соединен со входом блока идентификации, а второй вход - с выходом первого интегратора, вход которого подключен к выходу третьего сумматора, первый вход которого связан с выходом первого двухполупериодного выпрямителя (ДППВ), подключенного своим входом к выходу первого сумматора, первый вход которого связан с выходом первой ЛЗ, причем выход второй ЛЗ подключен к первому входу второго сумматора, выход которого соединен со входом второго ДППВ, выход которого подключен ко входу весового усилителя, выход которого соединен со вторым входом третьего сумматора.
Данное устройство распознает (идентифицирует) классы ЛА на основе анализа их обобщенных амплитудно-частотно-угловых отражательных характеристик. В нем, в отличие от [1], при распознавании учитывается степень амплитудно-частотной корреляции модулированных отраженных сигналов, полученных на различных ракурсах локации, и степень изрезанности вершины отраженного ЛЧМ-сигнала, преобразованного в видеосигнал. Флюктуации амплитуды отражений от рассеивающих центров (РЦ) поверхности ЛА обусловлены поворотами планера ЛА при рысканиях в турбулентной атмосфере [4]. При поворотах планера ЛА изменяется интерференционная картина отраженного поля, в результате чего некоторые РЦ затеняются другими элементами конструкции планера ЛА. Вследствие этого закон амплитудной модуляции отраженного ЛЧМ-сигнала изменяется и тем интенсивнее, чем больше угловая скорость изменения ракурса локации.
Однако устройство [3] не учитывает факт изменения угловых скоростей рыскания и их различия у разных ЛА. На интервале сопровождения ЛА имеются участки, в которых угловая скорость поворота планера равна нулю. Это соответствует моменту изменения направления поворота планера ЛА при его квазимаятниковом рыскании на атакующих курсовых углах в условиях турбулентности. А на боковых (курсовой угол близок к π/2) ракурсах пеленга угловая скорость рыскания планера  и угловая скорость поворота планера ЛА (относительно радиолокатора) за счет его движения по прямолинейной траектории
и угловая скорость поворота планера ЛА (относительно радиолокатора) за счет его движения по прямолинейной траектории  могут компенсировать друг друга. Тогда общая угловая скорость изменения ракурса локации
могут компенсировать друг друга. Тогда общая угловая скорость изменения ракурса локации  =
= +
+ также будет равна нулю [5, 6].
также будет равна нулю [5, 6].
Поэтому признак распознавания, проявляющийся в изменениях амплитудной модуляции, находится в сильной зависимости от выбора момента времени, используемого для распознавания ЛА. В середине каждого полупериода рыскания угловая скорость поворота планера ЛА на атакующих ракурсах принимает максимальное значение  . В узловых же точках полупериодов рыскания величина ≈0. В соответствии с этим величина, характеризующая степень изменения закона амплитудной модуляции вершин радиоимпульсов (от импульса к импульсу), изменяется, приводя к ошибкам распознавания и неоднозначности принимаемых решений. Для того, чтобы результаты распознавания были достоверными, необходимо анализировать отраженные сигналы только в те моменты времени, когда угловая скорость поворота планера ЛА при рысканиях максимальна. И хотя у разных ЛА угловая скорость рысканий планера в моменты ее максимизации различна, в среднем она определяется свойствами турбулентности преодолеваемой атмосферы и согласно [7, с.52-59] составляет величины порядка 1-2°С.
. В узловых же точках полупериодов рыскания величина ≈0. В соответствии с этим величина, характеризующая степень изменения закона амплитудной модуляции вершин радиоимпульсов (от импульса к импульсу), изменяется, приводя к ошибкам распознавания и неоднозначности принимаемых решений. Для того, чтобы результаты распознавания были достоверными, необходимо анализировать отраженные сигналы только в те моменты времени, когда угловая скорость поворота планера ЛА при рысканиях максимальна. И хотя у разных ЛА угловая скорость рысканий планера в моменты ее максимизации различна, в среднем она определяется свойствами турбулентности преодолеваемой атмосферы и согласно [7, с.52-59] составляет величины порядка 1-2°С.
Задачей изобретения является повышение вероятности правильного распознавания аэродинамических летательных аппаратов в квазиоптической области отражения радиоволн за счет адаптивного выбора момента извлечения из отраженных сигналов признака распознавания.
Выполнение указанной выше задачи достигается тем, что в известное радиолокационное устройство распознавания ЛА, содержащее синхронизатор, генератор ЛЧМ-сигнала, первый и второй смесители, импульсный модулятор, генератор ЛЧМ-сигнала, усилитель мощности, антенный переключатель, антенну, опорный генератор, УПЧ, АД и блок идентификации, причем выход синхронизатора соединен со входом генератора ЛЧМ-сигнала и входом импульсного модулятора, выход которого связан с первым входом усилителя мощности, второй вход которого подключен к выходу второго смесителя, соединенного своим первым входом с выходом генератора ЛЧМ-сигнала, а вторым входом - с выходом опорного генератора и первым входом первого смесителя, выход которого связан со входом УПЧ, связанного выходом со входом АД, выход усилителя мощности подключен ко входу антенного переключателя, связанного вход-выходом со вход-выходом антенны, а выходом - со вторым входом первого смесителя, дополнительно вводят аналого-цифровой преобразователь (АЦП), соединенный своим входом с выходом АД, а выходом - со входом блока корреляционной обработки (БКО) и первым входом оперативного запоминающего устройства (ОЗУ), второй вход которого соединяют с выходом БКО, а выход - со входом блока расчета значений признака распознавания (БРЗПР), подключенного своим выходом ко входу блока идентификации.
Предложенное построение схемы обеспечивает более точное распознавание ЛА в динамике его полета в турбулентной атмосфере на различных ракурсах локации, поскольку при извлечении признака распознавания используется выявленный алгоритмически момент максимизации угловой скорости поворота ЛА относительно радиолокатора.
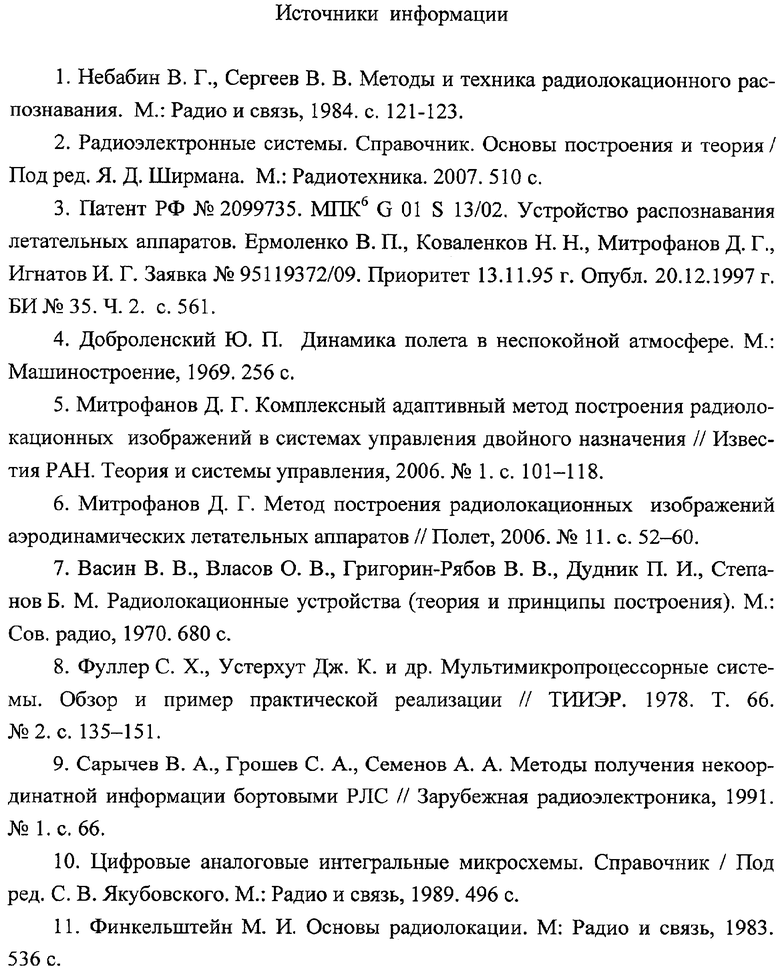
На фиг.1 приведена структурная схема предлагаемого устройства распознавания летательных аппаратов с адаптивным выбором момента анализа отраженного сигнала. Это устройство содержит импульсный модулятор 1, усилитель мощности 2, антенный переключатель 3, антенну 4, второй смеситель 5, опорный генератор 6, первый смеситель 7, УПЧ 8, генератор ЛЧМ-сигнала 9, АД 10, синхронизатор 11, АЦП 12, БКО 13, блок идентификации 14, БРЗПР 15 и ОЗУ 16.
Устройство распознавания летательных аппаратов с адаптивным выбором момента анализа отраженного сигнала работает следующим образом.
Синхронизатор 11 запускает генератор ЛЧМ-сигнала 9 и импульсный модулятор 1. Сигнал генератора ЛЧМ-сигнала 9 (с пилообразным линейным изменением частоты от F1 до F2) смешивается во втором смесителе 5 с сигналом опорного генератора 6 на частоте f0 и поступает в усилитель мощности 2, где модулируется импульсным модулятором 1 и в виде прямоугольных радиоимпульсов длительностью τи с линейной частотной модуляцией в полосе от f0+F1 до f0+F2 проходит антенный переключатель 3 и излучается антенной 4 в направлении распознаваемого ЛА, летящего в условиях турбулентности.
Частота f0 опорного генератора 6 определяет область квазиоптического отражения радиоволн от ЛА и выбирается такой, чтобы длина волны λ была намного меньше размеров ЛА. Полоса частот зондирующего ЛЧМ-сигнала ΔF=F2-F1 определяется из условия разрешения продольной (относительно ЛВЦ) структуры ЛА
ΔF=c/(2L ),
),
где с - скорость распространения радиоволн (скорость света); L||мин - минимальный разнос РЦ на поверхности ЛА в радиальном направлении, принимаемый при расчетах равным 1 м.
При облучении ЛА линейно-частотно-модулированным радиоимпульсом постоянной амплитуды отраженный от него радиолокационный сигнал будет амплитудно-модулированным, так как на каждой частоте он будет представлять собой результат интерференции радиоволн, отраженных от совокупности РЦ, находящихся на освещенной поверхности ЛА, с учетом изменяющихся набегов фаз при линейном изменении частоты.
Отраженные от ЛА сигналы принимаются антенной 4 и через антенный переключатель 3 передаются на первый смеситель 7, где смешиваются с сигналом опорного генератора 6, имеющим частоту f0. Частота принятого сигнала за счет вычитания частоты опорного сигнала f0 понижается до промежуточной Fпp. Далее сигналы в виде амплитудно-модулированных радиоимпульсов промежуточной частоты Fпp поступают на вход усилителя промежуточной частоты 8, где усиливается по мощности (амплитуде). Выходные сигналы УПЧ 8 детектируются амплитудным детектором 10. С выхода АД 10 видеосигналы с амплитудной модуляцией вершины поступают на вход АЦП 12. Предполагается, что ЛА находится на сопровождении, а отраженные сигналы стробируются по дальности, обеспечивая прохождение на вход приемника радиолокатора только отраженного сигнала от сопровождаемого ЛА в каждом периоде зондирования Ти.
Интервал дискретизации Δt АЦП 12 (по аналогии с временем задержки первой ЛЗ прототипа [3]) определяется условием однозначности разрешения структуры ЛА вдоль линии визирования. Значение Δt выбирается таким, чтобы за это время частота зондирующего ЛЧМ-сигнала изменилась на величину ΔFд, равную  где
где  - максимальный разнос РЦ в радиальном направлении на поверхности ЛА с максимальной продольной протяженностью.
- максимальный разнос РЦ в радиальном направлении на поверхности ЛА с максимальной продольной протяженностью.
Такой выбор Δt обеспечивает фиксацию даже самого узкого лепестка амплитудно-модулированной вершины принятого радиоимпульса (а после амплитудного детектирования - видеоимпульса) в нескольких точках, т.е. правильное отображение дискретными значениями амплитуды закона амплитудной модуляции.
С выхода АЦП 12 дискретные значения отраженного сигнала каждого периода в виде массива данных одновременно поступают в блок корреляционной обработки 13 и в ОЗУ 16. Кроме значений амплитуд АЦП 12 передает в БКО 13 и ОЗУ 16 время приема дискретизированного сигнала каждого периода зондирования. Массив данных о каждом отраженном сигнале состоит из N значений амплитуд и времени прихода этого сигнала в приемную систему радиолокатора.
Блок корреляционной обработки 13 определяет степень схожести (корреляции) законов амплитудной модуляции каждой пары смежных радиоимпульсов в течение 4-5 с. Это время обусловлено длительностью полупериодов рыскания планера ЛА в полете в турбулентной атмосфере. Степень корреляции двух смежных видеоимпульсов (радиоимпульсов) может быть оценена параметром
где N - число дискретных значений амплитуды видеоимпульса (N=τи/Δt);  - амплитуда сигнала (k+1)-го периода зондирования в n-й точке дискретизации;
- амплитуда сигнала (k+1)-го периода зондирования в n-й точке дискретизации;  - амплитуда сигнала k-го периода зондирования в n-й точке дискретизации (вариант дискретизации показан на фиг.2).
- амплитуда сигнала k-го периода зондирования в n-й точке дискретизации (вариант дискретизации показан на фиг.2).
Если угловая скорость поворота планера ЛА минимальна (отсутствует), то закон амплитудной модуляции импульсов двух смежных периодов зондирования будет идентичен, т.к. положение ЛА относительно радиолокатора останется неизменным. В этом случае параметр корреляции будет минимален (Аk≈0).
С увеличением угловой скорости взаимное расположение РЦ поверхности планера ЛА начнет изменяться, и соответствующим образом будет изменяться закон амплитудной модуляции отраженного сигнала. При максимальной угловой скорости поворота ЛА  =
= +
+ параметр корреляции будет максимален. Это значение соответствует определенному k-му периоду зондирования, который и необходимо использовать при распознавании.
параметр корреляции будет максимален. Это значение соответствует определенному k-му периоду зондирования, который и необходимо использовать при распознавании.
Блок корреляционной обработки представляет собой электронную вычислительную машину или микропроцессор [8, 9, 10]. В данном блоке на интервале 5 секунд рассчитываются значения параметра корреляции Аk для всех К периодов зондирования, укладывающихся в длительности рекомендованного интервала анализа 5 с. Из полученных К параметров корреляции в БКО 13 создается массив данных, который анализируется с целью нахождения в нем максимального элемента. Таким путем среди полученных К параметров корреляции выбирается максимальный и определяется момент времени (или номер) периода зондирования, соответствующий максимальному значению параметра корреляции, т.е. наименьшей степени корреляции между двумя смежными принятыми отраженными сигналами. Время приема такого сигнала передается с выхода БКО 13 на второй вход ОЗУ 16. На основании переданного из блока 13 цифрового кода, в который заложено значение времени минимальной корреляции смежных отраженных ЛЧМ-сигналов, из всего массива оцифрованных и дискретизированных амплитуд отраженных сигналов выбирают те, что соответствуют паре смежных оцифрованных отраженных импульсов в момент максимизации угловой скорости поворота ЛА.
Дискретизированные оцифрованные значения амплитуд выбранных смежных сигналов поступают в БРЗПР 15, где производится расчет величины признака распознавания ЛА. Процедура расчета аналогична той, что использовалась в прототипе [3].
Первая составляющая признака распознавания характеризует степень изрезанности вершины принятого отраженного ЛЧМ-сигнала. Она рассчитывается по формуле

где  - амплитуда первого (верхний индекс 1) из выбранной пары принятого ЛЧМ-сигнала в n-й точке дискретизации.
- амплитуда первого (верхний индекс 1) из выбранной пары принятого ЛЧМ-сигнала в n-й точке дискретизации.
Вторая составляющая признака распознавания может быть рассчитана по формуле
где  - амплитуда второго из принятой пары (верхний индекс 2), т.е. смежного с первым, принятого ЛЧМ-сигнала. В данном случае первым и вторым считаются только те два отраженных сигнала, оцифрованные амплитуды которых были переданы из блока 16 в блок 15. Следует заметить, что вторая составляющая признака распознавания тождественно равна параметру корреляции, вычисленному для двух выбранных отраженных сигналов. Поэтому логика работы предлагаемого устройства не изменится, если вместе с временем минимальной коррелированности отраженных сигналов соответствующий параметр корреляции будет передан транзитом из блока 13 через блок 16 в блок 15.
- амплитуда второго из принятой пары (верхний индекс 2), т.е. смежного с первым, принятого ЛЧМ-сигнала. В данном случае первым и вторым считаются только те два отраженных сигнала, оцифрованные амплитуды которых были переданы из блока 16 в блок 15. Следует заметить, что вторая составляющая признака распознавания тождественно равна параметру корреляции, вычисленному для двух выбранных отраженных сигналов. Поэтому логика работы предлагаемого устройства не изменится, если вместе с временем минимальной коррелированности отраженных сигналов соответствующий параметр корреляции будет передан транзитом из блока 13 через блок 16 в блок 15.
Как и в прототипе [3], для правильной работы устройства распознавания предъявляются дополнительные требования к периоду следования зондирующих ЛЧМ-сигналов. В частности, величина изменения углового положения ЛА за период следования импульсов Ти не должна превышать значения Δγ=λ/(4L ), где L
), где L - максимально возможный разнос РЦ на освещенной поверхности ЛА вдоль фронта падающей электромагнитной волны. Учитывая, что
- максимально возможный разнос РЦ на освещенной поверхности ЛА вдоль фронта падающей электромагнитной волны. Учитывая, что  , выбор периода следования импульсов Ти следует производить с учетом неравенства (условия):
, выбор периода следования импульсов Ти следует производить с учетом неравенства (условия):
Tи≤λ/(4Lmax
 )
)
Например, при λ=3 см, L=30 м, =3°/с период следования Ти не должен превышать величины 1,1 мс. Это вполне приемлемо для современных радиолокаторов.
Объединенный признак распознавания S рассчитывается в БРЗПР 15 по формуле
S=S1+vS2,
где v - коэффициент выравнивания весов значимости двух составляющих (S1 и S2) признака распознавания.
В объединенном признаке распознавания S будет заключена информация о величине частотных и угловых флюктуаций отраженного от ЛА сигнала [11] в момент максимизации угловой скорости его поворота относительно радиолокатора. Одновременно с расчетом величины S в блоке 15 проводится расчет суммы всех дискретизированных амплитуд одного из используемых видеоимпульсов по формуле
Результирующий признак распознавания по аналогии с [3] R рассчитывается в БРЗПР 15 по формуле
R=S/Z.
Цифровой код, пропорциональный величине R, поступает с выхода БРЗПР 15 на вход блока идентификации 14. В блоке 14 значение признака распознавания R сравнивается с набором пороговых сигналов, а по результату сравнения определяется класс ЛА. При этом более высокая величина признака распознавания R соответствует более сложному ЛА (большему числу РЦ на освещенной поверхности ЛА или большему продольно-поперечному размеру летательного аппарата по отношению к другим ЛА, состоящих из такого же количества РЦ).
Положительный эффект, определяемый совокупностью указанных выше признаков, состоит в том, что при распознавании ЛА исключается использование информации, соответствующей неизменному угловому положению ЛА относительно радиолокатора. Признак распознавания формируется в данном устройстве в момент времени, соответствующий максимальной угловой скорости изменения ракурса ЛА. В результате использования при распознавании признака, сформированного в идентичных для всех ЛА условиях, достоверность классификации (распознавания ЛА до классов) возрастает. Кроме того, цифровое построение схемы повышает точность расчета параметра распознавания R, упрощает конструкцию устройства и позволяет сохранять расчетные данные о частотно-угловых флюктуациях ЛА, что позволяет использовать эту информацию и в других каналах обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КЛАССИФИКАЦИИ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ ПО ИНТЕНСИВНОСТИ АМПЛИТУДНЫХ ФЛЮКТУАЦИЙ | 2010 |
|
RU2425395C2 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ДВИЖЕНИЯ | 2009 |
|
RU2416106C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1995 |
|
RU2099735C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| СПОСОБ ВЫБОРА ПОЛОЖЕНИЯ ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ ПРИ НАЛИЧИИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С ВОЗМОЖНОСТЬЮ ОЦЕНКИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ОТНОСИТЕЛЬНО РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2409823C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |

Изобретение относится к радиолокационным устройствам и может быть использовано для распознавания классов летательных аппаратов (ЛА) по сигнальным признакам. Изобретение направлено на повышение вероятности правильного распознавания аэродинамических летательных аппаратов в квазиоптической области отражения радиоволн. Предложенное устройство распознавания ЛА адаптивно использует для принятия решения о классе летательного аппарата частотно-угловые флюктуации отраженного линейно-частотно-модулируемого радиоимпульса. При распознавании анализируется изрезанность огибающей вершины отраженного сигнала и степень вариаций этой огибающей при изменении углового положения ЛА относительно радиолокатора с максимальной угловой скоростью. Устройство распознавания летательных аппаратов с адаптивным выбором момента анализа отраженного сигнала содержит импульсный модулятор 1, усилитель мощности 2, антенный переключатель 3, антенну 4, второй смеситель 5, опорный генератор 6, первый смеситель 7, усилитель промежуточной частоты 8, генератор линейно-частотно-модулированного сигнала 9, амплитудный детектор 10, синхронизатор 11, аналого-цифровой преобразователь 12, блок корреляционной обработки 13, блок идентификации 14, блок расчета значений признака распознавания 15 и оперативное запоминающее устройство 16. 2 ил.
Устройство распознавания летательных аппаратов с адаптивным выбором момента анализа отраженного сигнала, включающее антенну, антенный переключатель, усилитель мощности, импульсный модулятор, два смесителя, усилитель промежуточной частоты, опорный генератор, амплитудный детектор, генератор ЛЧМ-сигнала, синхронизатор и блок идентификации, причем синхронизатор, импульсный модулятор, усилитель мощности и антенный переключатель соединены последовательно, вход-выход антенного переключателя связан с вход-выходом антенны, а выход - со вторым входом первого смесителя, первый вход которого подключен к выходу опорного генератора и второму входу второго смесителя, соединенного своим выходом со вторым входом усилителя мощности, а первым входом - с выходом генератора ЛЧМ-сигнала, вход которого связан с выходом синхронизатора, выход первого смесителя соединен со входом усилителя промежуточной частоты, выход которого подключен ко входу амплитудного детектора,
отличающееся тем, что выход амплитудного детектора подключают ко входу аналого-цифрового преобразователя, выход которого соединяют со входом блока корреляционной обработки и первым входом оперативного запоминающего устройства, второй вход которого связывают с выходом блока корреляционной обработки, а выход - со входом блока расчета значений признака распознавания, выход которого подключают ко входу блока идентификации.
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1995 |
|
RU2099735C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| Потолочная розетка | 1938 |
|
SU54212A1 |
| Способ изготовления изделий из минеральной ваты | 1949 |
|
SU77980A1 |
| US 5497158 А, 05.03.1996 | |||
| JP 5157839 A, 25.06.1993. | |||

